1、概述
坐标系是为了确定机器人的位置和姿势而在机器人或空间上定义的位置指标系统,坐标系分为关节坐标系和直角坐标系,直角坐标系遵循右手定则,而关节坐标系则是以机器人每个轴所转动的角度来表示机器人当前的位置。
2、坐标系的分类及简介
⑴关节坐标系:关节坐标系是建立在机器人关节上的坐标系。如图 2.1 所示为各关节轴为0°的状态。

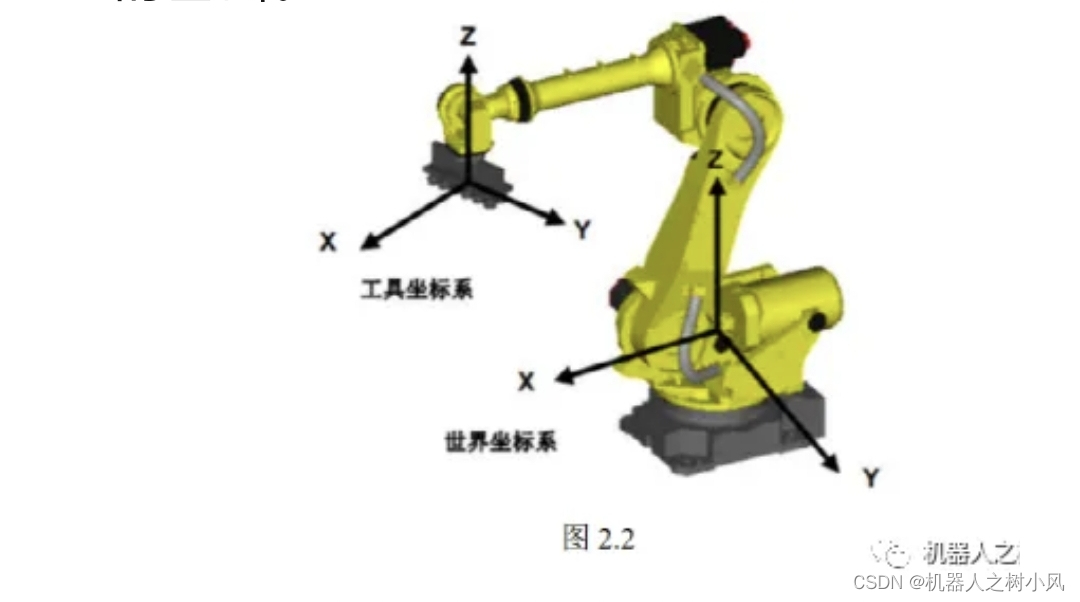
⑵直角坐标系:直角坐标系中的机器人的位置和姿势,通过工具中心点(对应工具坐标系)到用户(对应用户坐标系)原点的 X、Y、Z 方向的坐标值以及工具中心点绕用户原点 X、Y、Z 方向的旋转值 w、p、r 来确定。可简单理解为,直角坐标系的坐标值 X、Y、Z 是工具坐标系的原点在用户坐标系下的坐标值,直角坐标系的旋转值 w、 p、r 是工具坐标系 X、Y、Z 轴相对于用户坐标系 X、Y、Z 的旋转量。
直角坐标系可分为以下7种:
①机械接口坐标系:定义在机器人6轴法兰盘中心的坐标系,原点为法兰盘中心,Z轴垂直法兰盘向外,该坐标系不可修改,是工具坐标系建立的基础。
②工具坐标系:工具坐标系,由用户自定义,一般建立在工具的中心点,系统默认可建立10个工具坐标系(工具号为 1~10)。若没有建立工具坐标系,则默认机械接口坐标系为工具坐标系。
③世界坐标系:定义在机器人一轴中心的坐标系,该坐标系方向如图 2.2 所示,该坐标系不可修改,是用户坐标系建立的基础。
④用户坐标系:用户坐标系,由用户自定义,系统默认可建立9个用户坐标系(用户号为 1~9),若没有建立用户坐标系,则默认世界坐标系为用户坐标系,此时用户号为 0。
⑤点动坐标系:点动坐标系,是在作业区域中为了有效地进行点动而设定的坐标系,只在点动机器人时使用,系统默认可建立5个点动坐标系(1~5)。未定义时,则默认世界坐标系为点动坐标系。
⑥单元坐标系:单元坐标系,是工作单元内的所有机器人共享原点的坐标系,用于4D图形中,用来表示工作单元内机器人的位置。
⑦单元底板:单元底板,是在4D图形中,用来表达机器人所设置的地板的坐标系。
在同名公众号上能查看更多机器人技术内容。