文章目录
- ROS2 工作空间
- 创建工作空间
- 自动安装依赖
- 编译工作空间
- 设置环境变量
- 参考链接
ROS2 工作空间
工作空间可以简单理解为工程目录。
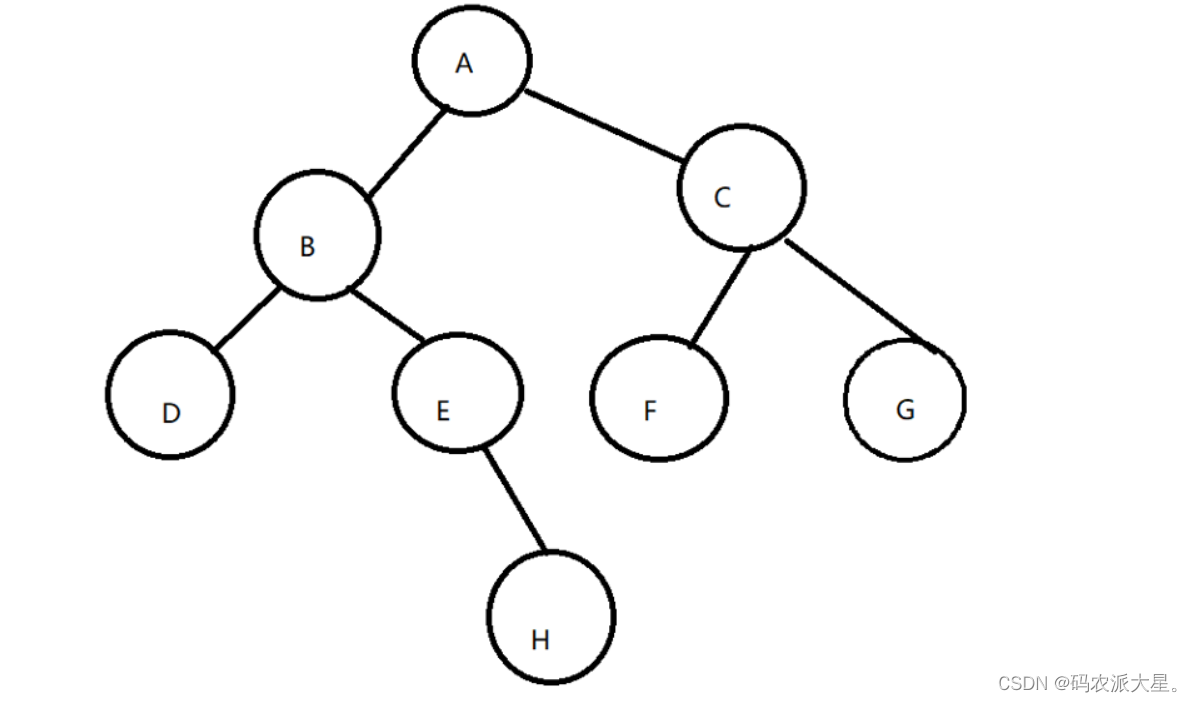
ROS 系统中一个典型的工作空间结构如图所示:

- dev_ws: 根目录,里面会有四个子目录(子空间);
- build: 编译空间,里面是编译过程中产生的中间文件;
- install: 安装空间,里面是编译得到的可执行文件和脚本;
- log: 日志空间,里面是编译和运行过程中产生的各种警告、错误、信息等日志;
- src: 代码空间,未来编写的代码、脚本,都需要人为的放置到这里。
创建工作空间
mkdir -p ~/dev_ws/src
然后在 ~/dev_ws/src 目录下编写代码。
自动安装依赖
sudo apt install python3-pip -y
sudo pip install rosdepc
sudo rosdepc init
rosdepc update
cd ~/dev_ws
rosdepc install -i --from-path src --rosdistro humble -y
编译工作空间
sudo apt install python3-colcon-ros
cd ~/dev_ws
colcon build
编译成功后,就可以在工作空间 dev_ws 中看到自动生成的 build、log、install 文件夹了。
设置环境变量
source install/local_setup.sh # 仅在当前终端生效
echo " source ~/dev_ws/install/local_setup.sh" >> ~/.bashrc # 所有终端均生效
参考链接
- https://book.guyuehome.com/ROS2/2.%E6%A0%B8%E5%BF%83%E6%A6%82%E5%BF%B5/2.1_%E5%B7%A5%E4%BD%9C%E7%A9%BA%E9%97%B4/
- https://www.guyuehome.com/35408