目标跟踪—卡尔曼滤波
卡尔曼滤波引入
滤波是将信号中特定波段频率滤除的操作,是抑制和防止干扰的一项重要措施。是根据观察某一随机过程的结果,对另一与之有关的随机过程进行估计的概率理论与方法。
历史上最早考虑的是维纳滤波,后来R.E.卡尔曼和R.S.布西于20世纪60年代提出了卡尔曼滤波。现对一般的非线性滤波问题的研究相当活跃。
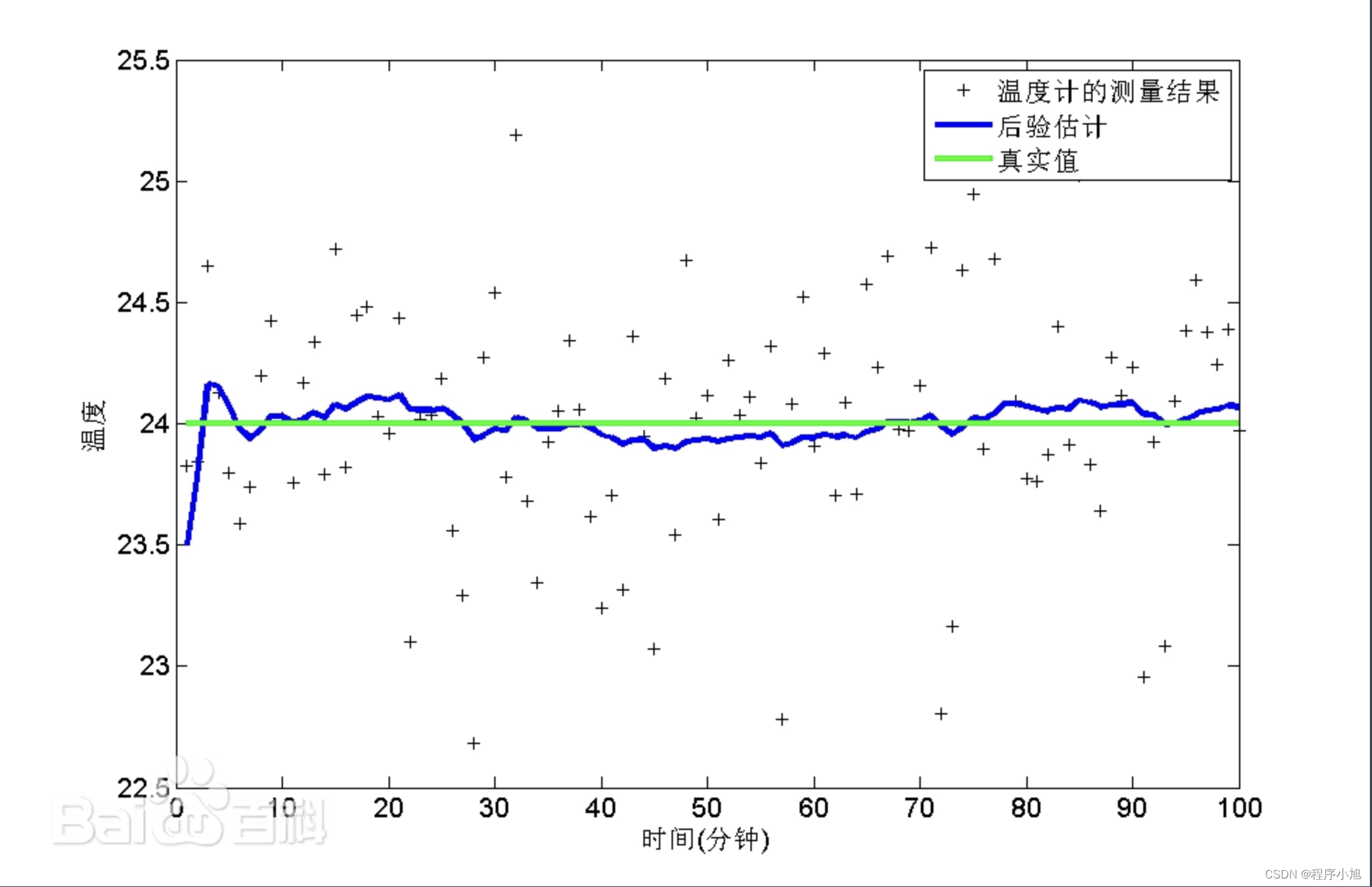
简单的理解滤波的作用是处理高斯噪声使得数据变得更加的平滑
适用系统
适用系统线性高斯系统:线性满足:叠加性和齐次性即为:
y
=
a
x
1
+
b
x
2
y=a x_{1}+b x_{2}
y=ax1+bx2
高斯:噪声满足高斯分布。
一般情况下的理想状态为: 信号 x 1 + 噪声 x 0 在使用卡尔曼滤波的情况下。修正值= w1 x 估计值 + w2 x 观察值。
且满足 w1+ w2 = 1的条件
卡尔曼滤波基础准备
状态空间表达式
状态方程:
x k = A x k − 1 + B u k + ω k {x_{k}}=A x_{k-1}+B u_{k}+\omega_{k} xk=Axk−1+Buk+ωk
- xk:表示当前状态的当前值 K代表当前的状态信息
- xk-1:表示上一个状态的当前值 K-1代表上一个状态信息
- wk:表示过程噪声
- uk:表示的是一个输入信息
- A: 表示的是一个状态转移矩阵
- B: 表示的是一个控制矩阵
观测方程:
y
k
=
C
x
k
+
v
k
y_{k}=C x_{k}+v_{k}
yk=Cxk+vk
- yk:表示要观测的值
- vk:表示一个过程噪声(与观察器误差有关可以简单理解为误差)
- xk:表示当前状态的当前值 K代表当前的状态信息
参数分析
高斯白噪声:满足期望为0的高斯分布
w k ∈ N ( 0 ; Q k ) V k ∈ N ( 0 ; R k ) \begin{array}{l} w_{k} \in N\left(0 ; Q_{k}\right) \\ V_{k} \in N\left(0 ; R_{k}\right) \end{array} wk∈N(0;Qk)Vk∈N(0;Rk)
其中Q:代表过程噪声的方差,R:代表观测噪声的方差。是在算法实现过程中的超参数
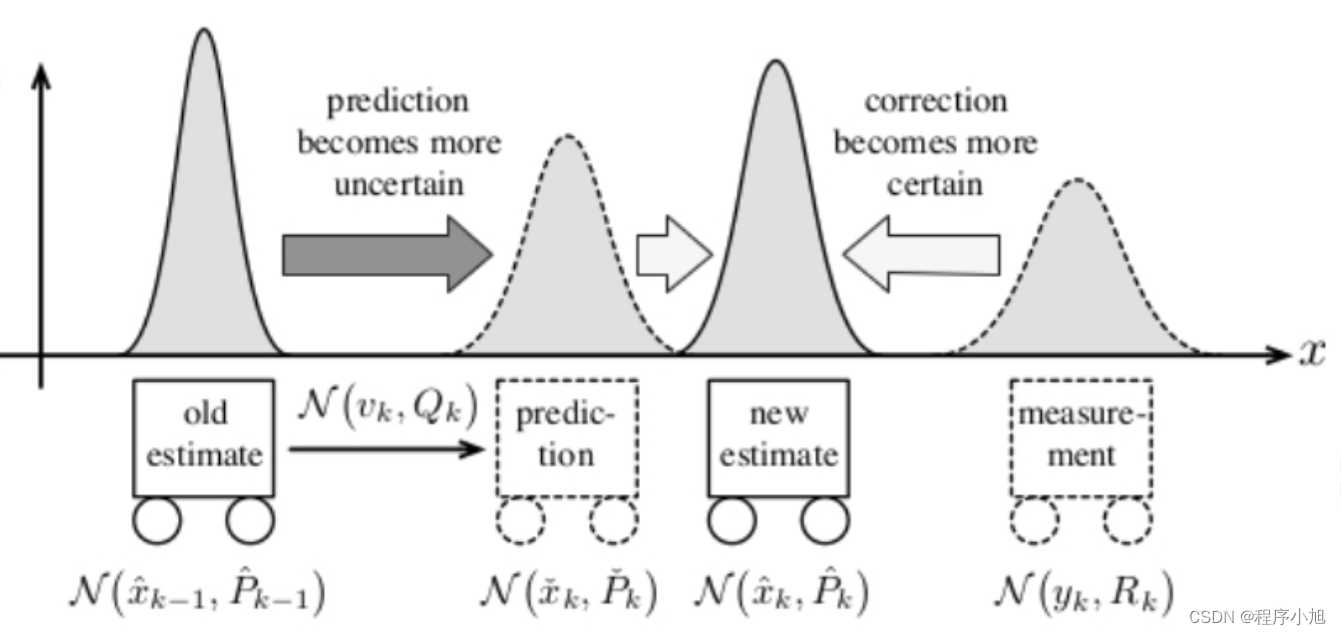
下面是卡尔曼滤波的直观图解
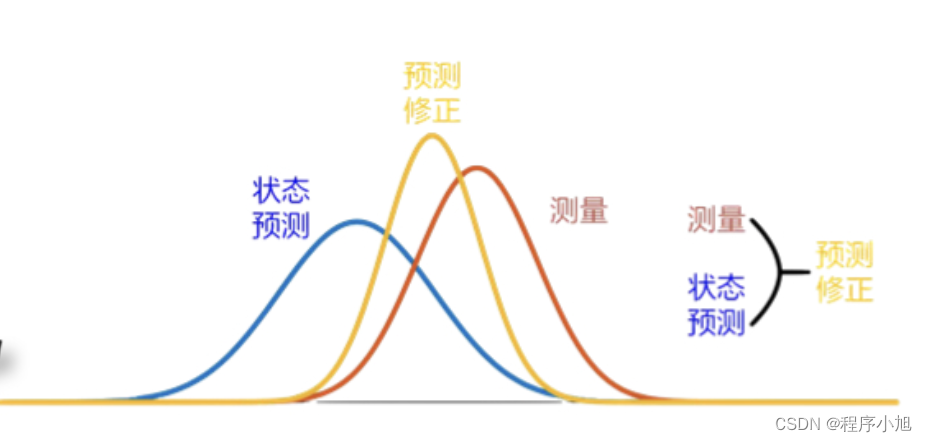
卡尔曼滤波的理论
卡尔曼滤波的理解:
实现过程: 使用上一次的最优结果预测当前的值,同时使用观测值****修正当前值,得到最优结果(可以简单理解为是一个递归的过程)
- 在预测过程中使用到的公式
x ^ t − = F x ^ t − 1 + B u t − 1 P t − = F P t − 1 F T + Q \begin{array}{l} \hat{x}_{t}^{-}=F \hat{x}_{t-1}+B u_{t-1} \\ P_{t}^{-}=F P_{t-1} F^{T}+Q \end{array} x^t−=Fx^t−1+But−1Pt−=FPt−1FT+Q
其中P(t)对应的是x的协方差矩阵,而其中的x-表示的就是一个预测估计
- 在更新过程中使用到的公式
K t = P t − H T ( H P t − H T + R ) − 1 x ^ t = x ^ t − + K t ( z t − H x ^ t − ) P t = ( I − K t H ) P t − \begin{array}{l} K_{t}=P_{t}^{-} H^{T}\left(H P_{t}^{-} H^{T}+R\right)^{-1} \\ \hat{x}_{t}=\hat{x}_{t}^{-}+K_{t}\left(z_{t}-H \hat{x}_{t}^{-}\right) \\ P_{t}=\left(I-K_{t} H\right) P_{t}^{-} \end{array} Kt=Pt−HT(HPt−HT+R)−1x^t=x^t−+Kt(zt−Hx^t−)Pt=(I−KtH)Pt−
z(t)表示的就是一个观测值 K:表示的是卡尔曼增益,在更新的过程中就涉及到了预测值的更新,与协方差矩阵的更新
先验估计的简单理解
x ^ t − = F x ^ t − 1 + B u t − 1 \hat{x}_{t}^{-}=F \hat{x}_{t-1}+B u_{t-1} \\ x^t−=Fx^t−1+But−1
其中的F即为状态转移矩阵 B即为控制矩阵
首先以匀加速直线运动为例化为状态方程的形式来进行表示
P
i
=
P
i
−
1
+
v
i
−
1
⋅
Δ
t
+
a
2
Δ
t
2
v
i
=
v
i
−
1
+
a
⋅
Δ
t
}
⇒
[
p
i
v
i
]
=
[
1
Δ
t
0
1
]
[
p
i
−
1
v
i
−
1
]
+
[
Δ
t
2
2
Δ
t
]
a
i
\left.\begin{array}{l} P_{i}=P_{i-1}+v_{i-1} \cdot \Delta t+\frac{a}{2} \Delta t^{2} \\ v_{i}=v_{i-1}+a \cdot \Delta t \end{array}\right\} \Rightarrow\left[\begin{array}{l} p_{i} \\ v_{i} \end{array}\right]=\left[\begin{array}{cc} 1 & \Delta t \\ 0 & 1 \end{array}\right]\left[\begin{array}{l} p_{i-1} \\ v_{i-1} \end{array}\right]+\left[\begin{array}{c} \frac{\Delta t^{2}}{2} \\ \Delta t \end{array}\right] a_{i}
Pi=Pi−1+vi−1⋅Δt+2aΔt2vi=vi−1+a⋅Δt}⇒[pivi]=[10Δt1][pi−1vi−1]+[2Δt2Δt]ai
先验估计的协方差
P t − = F P t − 1 F T + Q P_{t}^{-}=F P_{t-1} F^{T}+Q Pt−=FPt−1FT+Q
根据先验估计得到协方差的推导过程如下:
cov
(
x
^
t
−
,
x
^
t
−
)
=
cov
(
F
x
^
t
−
1
+
B
u
t
−
1
,
F
x
^
t
−
1
+
B
u
t
−
1
)
+
Q
=
F
cov
(
x
^
t
−
1
,
x
^
t
−
1
)
F
⊤
+
Q
\begin{array}{l} \operatorname{cov}\left(\hat{x}_{t}^{-}, \hat{x}_{t^{-}}\right)=\operatorname{cov}\left(F \hat{x}_{t-1}+B u_{t-1}, F \hat{x}_{t-1}+B u_{t-1}\right) \\ +Q=F \operatorname{cov}\left(\hat{x}_{t-1}, \hat{x}_{t-1}\right) F^{\top} +Q \\ \end{array}
cov(x^t−,x^t−)=cov(Fx^t−1+But−1,Fx^t−1+But−1)+Q=Fcov(x^t−1,x^t−1)F⊤+Q
从而得到了先验估计协方差的形式(带过程噪声的形式)
状态更新
通过修正估计得到卡尔曼滤波的最终值(最终滤波结果)
x ^ t = x ^ t − + K t ( z t − H x ^ t − ) P t = ( I − K t H ) P t − \hat{x}_{t}=\hat{x}_{t}^{-}+K_{t}\left(z_{t}-H \hat{x}_{t}^{-}\right) \\ P_{t}=\left(I-K_{t} H\right) P_{t}^{-} x^t=x^t−+Kt(zt−Hx^t−)Pt=(I−KtH)Pt−
核心需要用到卡尔曼增益与测量值,需要计算测量值-预测值*H
其中H表示观测矩阵的值
其中卡尔曼增益的表示形式为:
K t = p t − H ⊤ H p t − H ⊤ + R K_{t}=\frac{p_{t}^{-} H^{\top}}{H p_{t}^{-} H^{\top}+R} Kt=Hpt−H⊤+Rpt−H⊤
根据观测值和预测值的噪声调节对应的权重值k
P t − = F P t − 1 F − 1 + Q k = P t − H ⊤ H P t − H ⊤ + R } → 化简 k = P t − 1 + Q P t − 1 + Q + R \left.\begin{array}{l} P_{t}^{-}=F P_{t-1} F^{-1}+Q \\ k=\frac{P_{t}^{-} H^{\top}}{H P_{t}^{-} H^{\top}+R} \end{array}\right\} \xrightarrow{\text { 化简 }} k=\frac{P_{t-1}+Q}{P_{t-1}+Q+R} Pt−=FPt−1F−1+Qk=HPt−H⊤+RPt−H⊤} 化简 k=Pt−1+Q+RPt−1+Q
卡尔曼滤波推导
首先建立已知的现实空间中的状态空间:
x k = A x k − 1 + B u k − 1 + w k − 1 , P ( w ) ∼ ( 0 , Q ) , Q = E [ w w T ] z k = H x k + v k , P ( v ) ∼ ( 0 , R ) E [ w w T ] = E [ ( w 1 w 2 ) ( w 1 w 2 ) ] = [ E ( w 1 2 ) E ( w 1 w 2 ) E ( w 1 w 2 ) E ( w 2 2 ) ] = [ σ ( w 1 2 ) σ ( w 1 w 2 ) σ ( w 1 w 2 ) σ ( w 2 2 ) ] \begin{array}{c} x_{k}=A x_{k-1}+B u_{k-1}+w_{k-1}, \mathrm{P}(\mathrm{w}) \sim(0, \mathrm{Q}), \mathrm{Q}=\mathrm{E}\left[\mathrm{w} w^{T}\right] \\ z_{k}=H x_{k}+v_{k}, \mathrm{P}(\mathrm{v}) \sim(0, \mathrm{R}) \\ \mathrm{E}\left[\mathrm{w} w^{T}\right]=\mathrm{E}\left[\binom{w_{1}}{w_{2}}\left(\begin{array}{ll} w_{1} & \left.w_{2}\right) \end{array}\right]=\left[\begin{array}{cc} E\left(w_{1}^{2}\right) & E\left(w_{1} w_{2}\right) \\ E\left(w_{1} w_{2}\right) & E\left(w_{2}{ }^{2}\right) \end{array}\right]=\left[\begin{array}{cc} \sigma\left(w_{1}^{2}\right) & \sigma\left(w_{1} w_{2}\right) \\ \sigma\left(w_{1} w_{2}\right) & \sigma\left(w_{2}^{2}\right) \end{array}\right]\right. \end{array} xk=Axk−1+Buk−1+wk−1,P(w)∼(0,Q),Q=E[wwT]zk=Hxk+vk,P(v)∼(0,R)E[wwT]=E[(w2w1)(w1w2)]=[E(w12)E(w1w2)E(w1w2)E(w22)]=[σ(w12)σ(w1w2)σ(w1w2)σ(w22)]
其中核心在于Q表示的是协方差矩阵,可以通过w向量的形式写成,协方差矩阵的形式
同理vk也符合同样的分布模型
实际的状态空间模型
x ^ k ′ = A x ^ k − 1 + B u k − 1 z k = H x k → x ^ k = H ′ z k ′ \begin{array}{c} \hat{x}_{k}{ }^{\prime}=A \widehat{x}_{k-1}+B u_{k-1} \\ z_{k}=H x_{k} \rightarrow \widehat{x}_{k}=H^{\prime} z_{k^{\prime}} \end{array} x^k′=Ax k−1+Buk−1zk=Hxk→x k=H′zk′
我们建模中不知道的便是
ω
\omega
ω 和
v
v
v , 其余的矩阵是已知的, 而我们通过
X
k
=
A
X
k
−
1
+
B
U
k
−
1
X_{k}=A X_{k-1}+B U_{k-1}
Xk=AXk−1+BUk−1 这个公式得到的
X
^
k
\hat{X}_{k}
X^k 其实是不正确的,在这里在上面增加一个小小的负号, 表明它是先验估计值。
X
^
k
−
=
A
X
^
k
−
1
+
B
U
k
−
1
,
(
这里的
X
^
k
−
1
也是估计值
)
\hat{X}_{k}^{-}=A \widehat{X}_{k-1}+B U_{k-1} , (这里的 \widehat{X}_{k-1} 也是估计值)
X^k−=AX
k−1+BUk−1,(这里的X
k−1也是估计值)
由于我们是知道测试结果(测量得到)
Z
k
,
Z_{k} ,
Zk,
那么在不考虑测量噪音的情况下, 可以大体得到一个估计的
X
^
k
\hat{X}_{k}
X^k ,
那么我们令这个估计的
X
^
k
命名为
X
^
k
m
\hat{X}_{k} 命名为 \hat{X}_{k_{m}}
X^k命名为X^km , 表示这是根据测试结果估计得到的
X
^
k
\hat{X}_{k}
X^k
那么, 根据公式
Z
k
=
H
X
^
k
Z_{k}=H \hat{X}_{k}
Zk=HX^k , 可以得到
X
^
k
mea
=
H
−
1
Z
k
,
(
由于是可以观测的系统
,
因此
H
一定是可逆的
)
\hat{X}_{k_{\text {mea }}}=H^{-1} Z_{k} , (由于是可以观测的系统, 因此 \mathrm{H} 一定是可逆的)
X^kmea =H−1Zk,(由于是可以观测的系统,因此H一定是可逆的)
因此我们得到了两个不同的关于Xk的结果,一个是先验结果xk-(算出来的),另一个是测出来的结果xkmca(测出来的),但是着两个其实都是不准确的,因为其没有考虑噪声的影响我们真正要求的是xk(表示后验),包含了噪声的影响。
引入数据融合的概念
结合数据融合的概念可以得到
已知 X ^ k − , X ^ k mea 那么 X ^ k = X ^ k − + G ( X ^ k mea − X ^ k − ) , ( G 是方阵也就是要推导和卡尔曼增益 ) 已知 \hat{X}_{k}{ }^{-}, \hat{X}_{k_{\text {mea }}} 那么 \hat{X}_{k}=\hat{X}_{k}^{-}+G\left(\hat{X}_{k_{\text {mea }}}-\hat{X}_{k}^{-}\right),(\mathrm{G} 是方阵 也就是要推导和卡尔曼增益 ) 已知X^k−,X^kmea 那么X^k=X^k−+G(X^kmea −X^k−),(G是方阵也就是要推导和卡尔曼增益)
X ^ k mea = H − 1 Z k , 那么 X ^ k = X ^ k − + G ( H − 1 Z k − X ^ k − ) , 那么令 K k = G H − 1 , 便可以得到 X ^ k = X ^ k − + K k ( Z k − H X ^ k − ) , 那么在此时 K k ∉ ( 0 , 1 ) , 而是 K k ∉ ( 0 , H − 1 ) , \hat{X}_{k_{\text {mea }}}=H^{-1} Z_{k} , 那么 \hat{X}_{k}=\hat{X}_{k}^{-}+G\left(H^{-1} Z_{k}-\widehat{X}_{k}^{-}\right) , 那么令 K_{k}=G H^{-1} , 便可以得到 \hat{X}_{k}=\hat{X}_{k}^{-}+K_{k}\left(Z_{k}-H \hat{X}_{k}{ }^{-}\right) , 那么在此时 K_{k} \notin(0,1) , 而是 K_{k} \notin\left(0, H^{-1}\right) , X^kmea =H−1Zk,那么X^k=X^k−+G(H−1Zk−X k−),那么令Kk=GH−1,便可以得到X^k=X^k−+Kk(Zk−HX^k−),那么在此时Kk∈/(0,1),而是Kk∈/(0,H−1),
推导卡尔曼增益
因此我们的目标就变得十分清晰了,就是求使得考虑了噪声之后的估计值趋近于真实值,
那么此时引入误差: e k = X k − X ^ k e_{k}=X_{k}-\hat{X}_{k} ek=Xk−X^k
同理P ( e k ) ∼ ( 0 , P ) , P 也是那个协方差矩阵 \text { 同理P }\left(e_{k}\right) \sim(0, P), P \text { 也是那个协方差矩阵 } 同理P (ek)∼(0,P),P 也是那个协方差矩阵
而当在不同的维度上的方差越小,那么说明这个e越接近0,因此估计值和真实值也就是最相近的。所以,要选择合适的K使得tr(P)(矩阵对角线相加)最小,那么优化问题就变成了下面这个公式。
P = E ( e k e k T ) = E ( ( X k − X ^ k ) ( X k − X ^ k ) T ) , 将 X ^ k = X ^ k − + K k ( Z k − H X ^ k − ) 代入, 可以得到 P = E ( ( X k − ( X ^ k − + K k ( Z k − H X ^ k − ) ) ) ( X k − ( X ^ k − + K k ( Z k − H X ^ k − ) ) ) T ) , \begin{array}{l} \mathrm{P}=\mathrm{E}\left(e_{k} e_{k}{ }^{T}\right)=\mathrm{E}\left(\left(X_{k}-\hat{X}_{k}\right)\left(X_{k}-\hat{X}_{k}\right)^{T}\right), \\ \text { 将 } \hat{X}_{k}=\hat{X}_{k}^{-}+K_{k}\left(Z_{k}-H \hat{X}_{k}^{-}\right) \text {代入, } \\ \text { 可以得到 } \mathrm{P}=\mathrm{E}\left(\left(X_{k}-\left(\hat{X}_{k}^{-}+K_{k}\left(Z_{k}-H \hat{X}_{k}^{-}\right)\right)\right)\left(X_{k}-\left(\hat{X}_{k}^{-}+K_{k}\left(Z_{k}-H \hat{X}_{k}^{-}\right)\right)\right)^{T}\right) \text {, } \\ \end{array} P=E(ekekT)=E((Xk−X^k)(Xk−X^k)T), 将 X^k=X^k−+Kk(Zk−HX^k−)代入, 可以得到 P=E((Xk−(X^k−+Kk(Zk−HX^k−)))(Xk−(X^k−+Kk(Zk−HX^k−)))T),
那么此时将 Z k = H X k + v k , 进行替换。 那么此时将 Z_{k}=H X_{k}+v_{k} , 进行替换。 那么此时将Zk=HXk+vk,进行替换。
那么 X k − X ^ k = X k − X ^ k − − K k X_{k}-\hat{X}_{k}=X_{k}-\hat{X}_{k}^{-}-K_{k} Xk−X^k=Xk−X^k−−Kk ( H X k + v k ) + K k H X ^ k − = X k − X ^ k − − K k \left(H X_{k}+v_{k}\right)+K_{k} H \hat{X}_{k}^{-}=X_{k}-\hat{X}_{k}^{-}-K_{k} (HXk+vk)+KkHX^k−=Xk−X^k−−Kk
H
(
X
k
−
X
^
k
−
)
−
K
k
v
k
=
(
I
−
K
k
H
)
(
X
k
−
X
^
k
−
)
−
K
k
v
k
,
H\left(X_{k}-\hat{X}_{k}^{-}\right)-K_{k} v_{k}=\left(I-K_{k} H\right)\left(X_{k}-\hat{X}_{k}^{-}\right)-K_{k} v_{k} ,
H(Xk−X^k−)−Kkvk=(I−KkH)(Xk−X^k−)−Kkvk,
由于
e
k
=
X
k
−
X
^
k
e_{k}=X_{k}-\widehat{X}_{k}
ek=Xk−X
k , 因此也可以命名
X
k
−
X
^
k
−
为
e
k
X_{k}-\widehat{X}_{k}^{-} 为 e_{k}
Xk−X
k−为ek 的先验, 记为
e
k
−
,
e_{k}{ }^{-} ,
ek−,
因此 P 可改写: P = E ( e k e k T ) = E ( ( ( I − K k H ) e k − − K k v k ) ( ( I − K k H ) e k − − K k v k ) T ) , \text { 因此 } \mathrm{P} \text { 可改写:} \mathrm{P}=\mathrm{E}\left(e_{k} e_{k}{ }^{T}\right)=\mathrm{E}\left(\left(\left(I-K_{k} H\right) e_{k}{ }^{-}-K_{k} v_{k}\right)\left(\left(I-K_{k} H\right) e_{k}^{-}-K_{k} v_{k}\right)^{T}\right) \text {, } 因此 P 可改写:P=E(ekekT)=E(((I−KkH)ek−−Kkvk)((I−KkH)ek−−Kkvk)T),
= E [ ( I − k k H ) e k ′ e k T T ( I − k k H ) T − ( I − k k H ) e k ′ v k T k k T − k k v k e k r T ( I − k k H ) T + k k v k v k T k k T ] = E [ ( I − k k H ) e k ′ e k ′ T ( I − k k H ) T ] − E [ ( I − k k H ) e k ′ v k T k k T ] − E [ k k v k e k ′ T ( I − k k H ) T ] + E [ k k v k v k T k k T ] \begin{array}{c} =\mathrm{E}\left[\left(I-k_{k} H\right) e_{k}^{\prime} e_{k}^{T T}\left(I-k_{k} H\right)^{T}-\left(I-k_{k} H\right) e_{k}^{\prime} v_{k}{ }^{T} k_{k}{ }^{T}-k_{k} v_{k} e_{k}^{r T}\left(I-k_{k} H\right)^{T}+k_{k} v_{k} v_{k}{ }^{T} k_{k}{ }^{T}\right] \\ =\mathrm{E}\left[\left(I-k_{k} H\right) e_{k}^{\prime} e_{k}^{\prime T}\left(I-k_{k} H\right)^{T}\right]-E\left[\left(I-k_{k} H\right) e_{k}^{\prime} v_{k}{ }^{T} k_{k}{ }^{T}\right]-E\left[k_{k} v_{k} e_{k}^{\prime T}\left(I-k_{k} H\right)^{T}\right] \\ +E\left[k_{k} v_{k} v_{k}{ }^{T} k_{k}{ }^{T}\right] \end{array} =E[(I−kkH)ek′ekTT(I−kkH)T−(I−kkH)ek′vkTkkT−kkvkekrT(I−kkH)T+kkvkvkTkkT]=E[(I−kkH)ek′ek′T(I−kkH)T]−E[(I−kkH)ek′vkTkkT]−E[kkvkek′T(I−kkH)T]+E[kkvkvkTkkT]
因为 E [ e k − ] = 0 , E [ v k T ] = 0 上式可简化为 : = E [ ( I − k k H ) e k ′ e k T T ( I − k k H ) T ] + E [ k k v k v k T k k T ] = ( I − k k H ) E [ e k ′ e k T T ] ( I − k k H ) T + k k E [ v k v k T ] k k T 设 P k − = E [ e k ′ e k ′ T ] , R = E [ v k v k T ] , 于是有 : = ( I − k k H ) P k ′ ( I − k k H ) T + k k R k k T = ( P k ′ − k k H P k ′ ) ( I − k k H ) T + k k R k k T = ( P k ′ − k k H P k ′ ) ( I T − H T k k T ) + k k R k k T P k = P k ′ − k k H P k ′ − P k ′ H T k k T + k k H P k ′ H T k k T + k k R k k T 因为 P k ′ H T k k T = ( k k ( P k ′ H T ) ) T = ( k k H P k ′ T ) T tr ( P k ) = tr ( P k ′ ) − 2 tr ( k k H P k ′ ) + tr ( k k H P k ′ H T k k T ) + tr ( k k R k k T ) 令 dtr ( P k ) d k k = 0 又因为 : d t r ( A B ) d A = B T dtr ( A B A T ) d A = A B + A B T 因为 R 、 H P k − H T 是对角矩阵 , 所以 : tr ( k k H P k ′ H T k k T ) = 2 k k H P k ′ H T , tr ( k k R k k T ) = 2 k k R 于是有。 因为 \mathrm{E}\left[e_{k}^{-}\right]=0, E\left[v_{k}{ }^{T}\right]=0 上式可简化为: \begin{array}{l} =\mathrm{E}\left[\left(I-k_{k} H\right) e_{k}^{\prime} e_{k}^{T T}\left(I-k_{k} H\right)^{T}\right]+E\left[k_{k} v_{k} v_{k}{ }^{T} k_{k}{ }^{T}\right] \\ =\left(I-k_{k} H\right) \mathrm{E}\left[e_{k}^{\prime} e_{k}{ }^{T T}\right]\left(I-k_{k} H\right)^{T}+k_{k} E\left[v_{k} v_{k}{ }^{T}\right] k_{k}{ }^{T} \end{array} 设 P_{k}^{-}=\mathrm{E}\left[e_{k}^{\prime} e_{k}^{\prime T}\right], R=E\left[v_{k} v_{k}{ }^{T}\right] ,于是有: \begin{array}{c} =\left(I-k_{k} H\right) P_{k}^{\prime}\left(I-k_{k} H\right)^{T}+k_{k} R k_{k}{ }^{T} \\ =\left(P_{k}^{\prime}-k_{k} H P_{k}^{\prime}\right)\left(I-k_{k} H\right)^{T}+k_{k} R k_{k}{ }^{T} \\ =\left(P_{k}^{\prime}-k_{k} H P_{k}^{\prime}\right)\left(I^{T}-H^{T} k_{k}{ }^{T}\right)+k_{k} R k_{k}{ }^{T} \\ \mathrm{P}_{k}=P_{k}^{\prime}-k_{k} H P_{k}^{\prime}-P_{k}^{\prime} H^{T} k_{k}{ }^{T}+k_{k} H P_{k}^{\prime} H^{T} k_{k}{ }^{T}+k_{k} R k_{k}{ }^{T} \end{array} 因为 P_{k}^{\prime} H^{T} k_{k}{ }^{T}=\left(k_{k}\left(P_{k}^{\prime} H^{T}\right)\right)^{T}=\left(k_{k} H P_{k}^{\prime T}\right)^{T} \operatorname{tr}\left(\mathrm{P}_{k}\right)=\operatorname{tr}\left(P_{k}^{\prime}\right)-2 \operatorname{tr}\left(k_{k} H P_{k}^{\prime}\right)+\operatorname{tr}\left(k_{k} H P_{k}^{\prime} H^{T} k_{k}{ }^{T}\right)+\operatorname{tr}\left(k_{k} R k_{k}{ }^{T}\right) 令 \frac{\operatorname{dtr}\left(\mathrm{P}_{k}\right)}{d k_{k}}=0 又因为: \begin{array}{c} \frac{\mathrm{dtr}(\mathrm{AB})}{d A}=B^{T} \\ \frac{\operatorname{dtr}\left(\mathrm{ABA}^{T}\right)}{d A}=A B+\mathrm{AB}^{T} \end{array} 因为 \mathrm{R} 、 H P_{k}^{-} H^{T} 是对角矩阵, 所以: \operatorname{tr}\left(k_{k} H P_{k}^{\prime} H^{T} k_{k}^{T}\right)=2 k_{k} H P_{k}^{\prime} H^{T}, \quad \operatorname{tr}\left(k_{k} R k_{k}^{T}\right)=2 k_{k} R 于是有。 因为E[ek−]=0,E[vkT]=0上式可简化为:=E[(I−kkH)ek′ekTT(I−kkH)T]+E[kkvkvkTkkT]=(I−kkH)E[ek′ekTT](I−kkH)T+kkE[vkvkT]kkT设Pk−=E[ek′ek′T],R=E[vkvkT],于是有:=(I−kkH)Pk′(I−kkH)T+kkRkkT=(Pk′−kkHPk′)(I−kkH)T+kkRkkT=(Pk′−kkHPk′)(IT−HTkkT)+kkRkkTPk=Pk′−kkHPk′−Pk′HTkkT+kkHPk′HTkkT+kkRkkT因为Pk′HTkkT=(kk(Pk′HT))T=(kkHPk′T)Ttr(Pk)=tr(Pk′)−2tr(kkHPk′)+tr(kkHPk′HTkkT)+tr(kkRkkT)令dkkdtr(Pk)=0又因为:dAdtr(AB)=BTdAdtr(ABAT)=AB+ABT因为R、HPk−HT是对角矩阵,所以:tr(kkHPk′HTkkT)=2kkHPk′HT,tr(kkRkkT)=2kkR于是有。
− P k ′ H T + k k ( H P k ′ H T + R ) = 0 k k ( H P k ′ H T + R ) = P k ′ H T k k = P k ′ H T H P k ′ H T + R \begin{array}{c} -P_{k}^{\prime} H^{T}+k_{k}\left(H P_{k}^{\prime} H^{T}+R\right)=0 \\ k_{k}\left(H P_{k}^{\prime} H^{T}+R\right)=P_{k}^{\prime} H^{T} \\ k_{k}=\frac{P_{k}^{\prime} H^{T}}{H P_{k}^{\prime} H^{T}+R} \end{array} −Pk′HT+kk(HPk′HT+R)=0kk(HPk′HT+R)=Pk′HTkk=HPk′HT+RPk′HT