河北稳控科技振弦采集模块配置工具VMTool的常见功能

一、实时数据读取
当 VMTool 与模块为连接状态时( 4.3.1 模块的连接与断开), 勾选实时数据区的【 自动读取】 复选框, VMTool 开始自动向模块发送实时数据读取指令, 修改【 时间间隔】 文本框内的数值可改变相邻两条读取指令的时间间隔, 单位为毫秒。 自动发送读取指令后, VMTool 等待模块返回实时数据, 直到模块返回了正确的实时数据后才会启动下次指令发送。
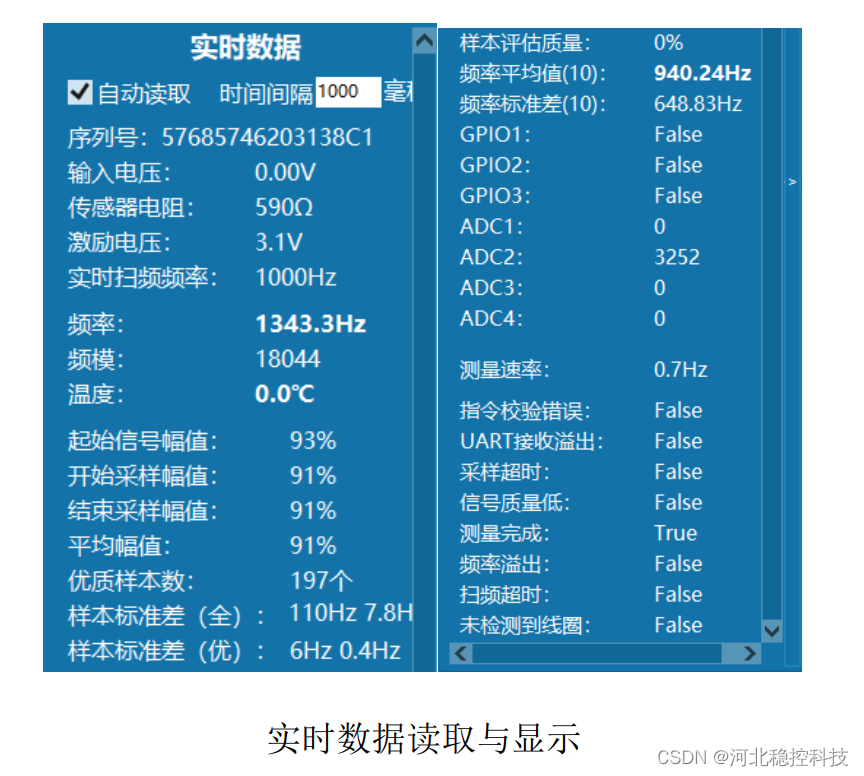
实时数据区中各物理量的含意见第 3 章中的相关寄存器说明。
测量频率: VMTool 根据最后两次收到 VMXXX 实时数据的时间差估算得到的数据接收速率。由于 VMXXX 模块采用测量优先的工作策略, 若模块“ 正忙” 时收到指令,则会等待当前测量完成后才会响应并执行指令, 返回指令的响应信息, 故此, 当使用本节介绍的“ 自动读取” 功能时, 将读取时间间隔设置为小于模块实际测量速率的值, 此时模块每次的测量结果均被读取到,这种情况下计算得出的数据接收速率其实就是模块的读数速率。 如:若通过观察,模块的读数速率为 1Hz 左右时,此处的自动读取时间间隔应设置为比 1000 毫秒低的值,推荐为 500ms, 这样得到的测量频率值就是模块读数速率,若此时时间间隔设置为大于 1000ms 的值时,得到的测量频率值仅能说明界面的更新速率,而与模块的读数速率没有直接关系。
运行状态: 包括指令校验、采样超时等数个运行状态标志, True 表示状态为真(或“ 是” ),False 表示状态为假(或“ 否” )。
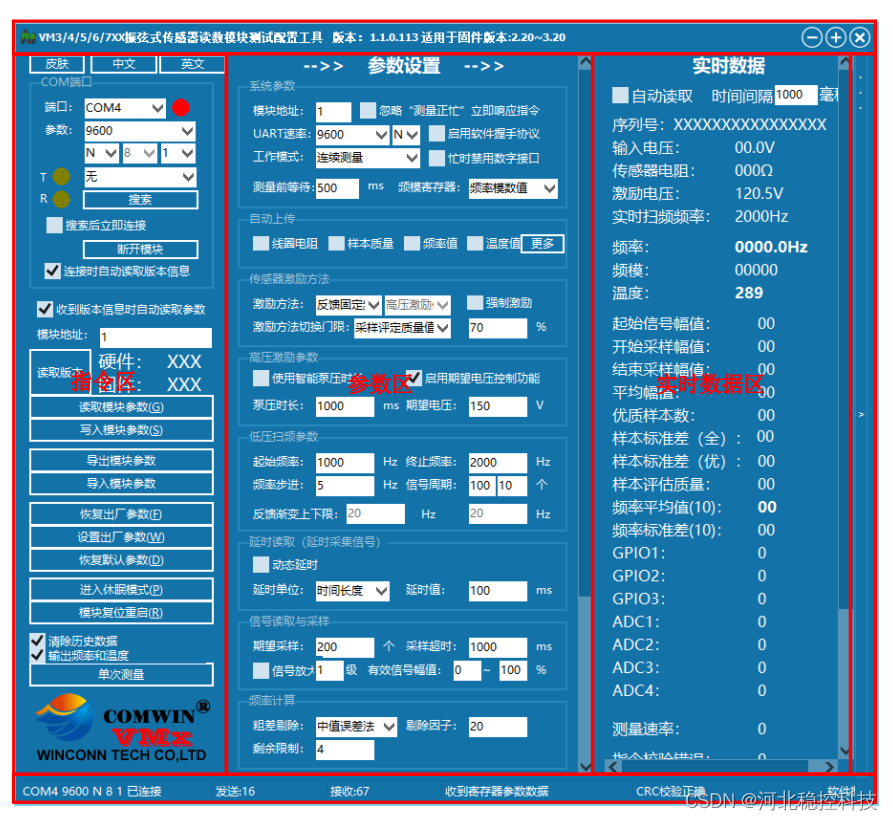
二、软件握手协议
VMTool 支持与模块之间的软件握手协议, 在模块启用了软件握手前提下( 详见“3.7 小节中关于软件握手的说明” ), VMTool 可以利用软件协议实现仅在模块处于空闲时才会向模块发送指令。通过点击主界面指令区内的握手协议下接框,选择【 软件握手】 选项,开启 VMTool 的软件握手功能。 启用软件握手之前, 向模块发送指令后模块通常不会立即响应( 数据发送指示器闪烁后数据接收指示器不会立即闪烁), 启用软件握手之后, 会观察到数据发送指示器闪烁后数据接收指示器也会立即闪烁,即: 向模块发送的指令得到了即时响应。
若 VMTool 开启了软件握手功能而 VMXXX 模块未开启此功能时, 会导致 VMTool 因为未接收到有效的软件握手协议信号而长时间处于指令准备发送状态,并在等待超时后才会向模块发送,从 VMTool 状态栏可以观察到这一过程,会有正在检测模块软件握手信号和未检测到软件握手信号显示。
基本概念
振弦传感器:(vibrating wire sensor)是以拉紧的金属钢弦作为敏感元件的谐振式传感器。当弦的长度确定之后,其固有振动频率的变化量即可表征钢弦所受拉力的大小。根据这一特性原理,即可通过一定的物理(机械)结构制作出测量不同种 类物理量的传感器(如:应变传感器、压力传感器、位移传感器等),从而实现被测物理量与频率值之间的一一对应关系,通过测量频率值变化量来计算出被测物理量 的改变量。
振弦传感器采集读数模块:指针对振弦传感器的特性而设计的传感器激励、读数模块。具有集成度高、功能模块化、数字接口的一系列特性,能完成振弦 传感器的激励、信号检测、数据处理、质量评估等专用针对性功能,进行传感器频 率和温度物理量模数转换,进而通过数字接口实现数据交互。振弦传感器读数模块 是振弦传感器与数字化、信息化之间的核心转换单元。
激励:也称为“激振”,是振弦类传感器频率数据获取的必须过程,仅当传感器收 到合适的激励信号后才能产生自振,而仅当振弦传感器产生自振后才能输出频率信 号,进一步的,读数电路会检测并读取振弦传感器的自振信号,才能通过计算得到 振动频率值。振弦传感器的激励信号(能够使传感器产生自振的外部信号)一般分 为两类,一类为高压短促脉冲,一类为特定频率的多组连续低压脉冲信号。
高压脉冲激励:使用较高电压(100~200V)向振弦传感器线圈发送短促脉冲,使任 意频率的振弦传感器产生自振的过程或方法。
低压扫频激励:使用与传感器自振频率相当(接近)的频率向振弦传感器发送连续 的低压(3~10V)脉冲信号,使传感器产生自振的过程或方法。