蜂鸣器--------TIM4 CH1/PB6
风扇-----------TIM1 CH1/PE9
马达-----------TIM16 CH1/PF6
一.PWM框图
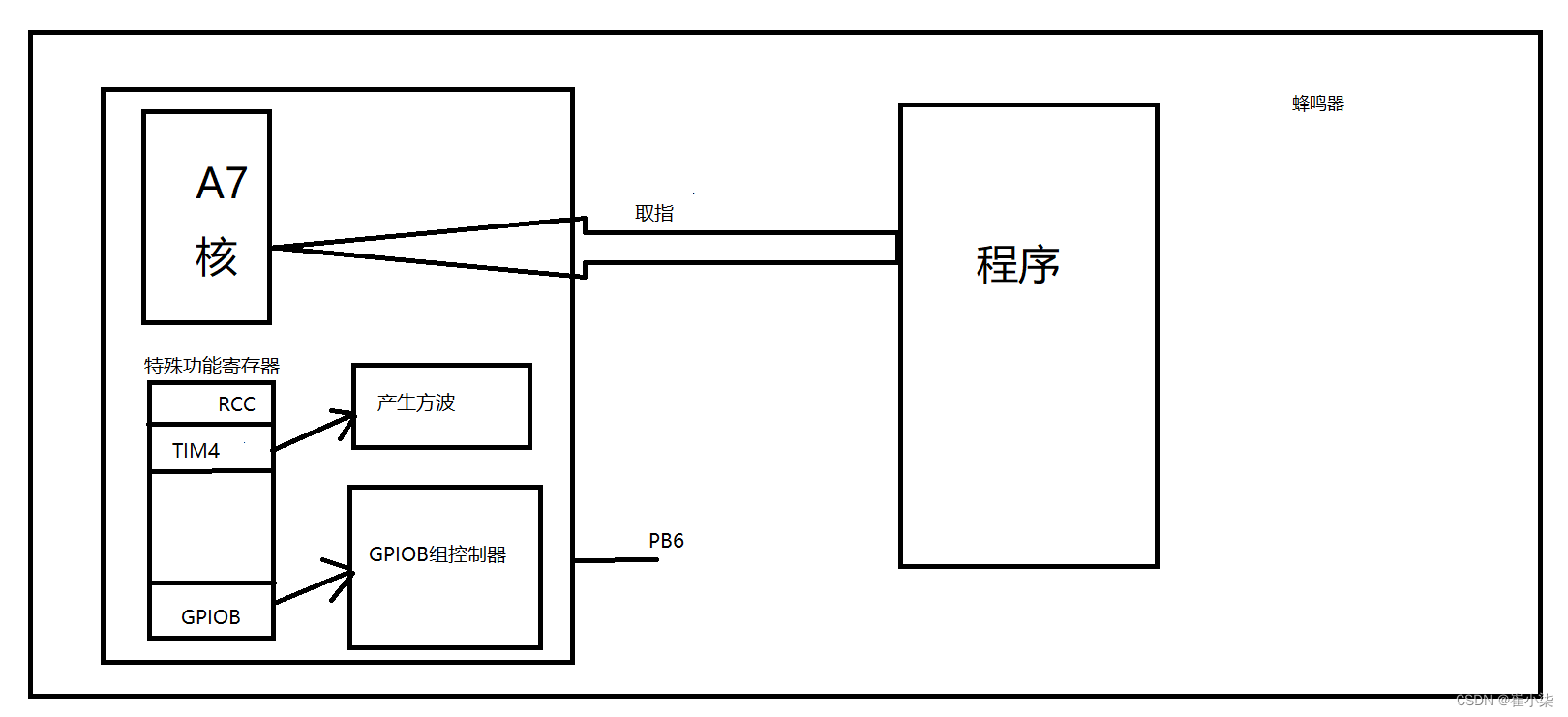
RCC:使能GPIOB
GPIOB:设置复用功能
TIM4:产生方波
二.分析RCC
确定总线,使能GPIOB和TIM4,GPIOE和TIM1,GPIO和TIM16
三.分析GPIO章节
设置GPIOB IO模式为复用模式,并设置复用功能为TIM4(蜂鸣器)
设置GPIOE IO模式为复用模式,并设置复用功能为TIM1(风扇)
设置GPIOF IO模式为复用模式,并设置复用功能为TIM16(马达)
四.产生方波
1.计数方式
(1)递增计数 (边缘对齐)
(2)递减计数 (边缘对齐)
(3)递增递减计数 (中心对齐)
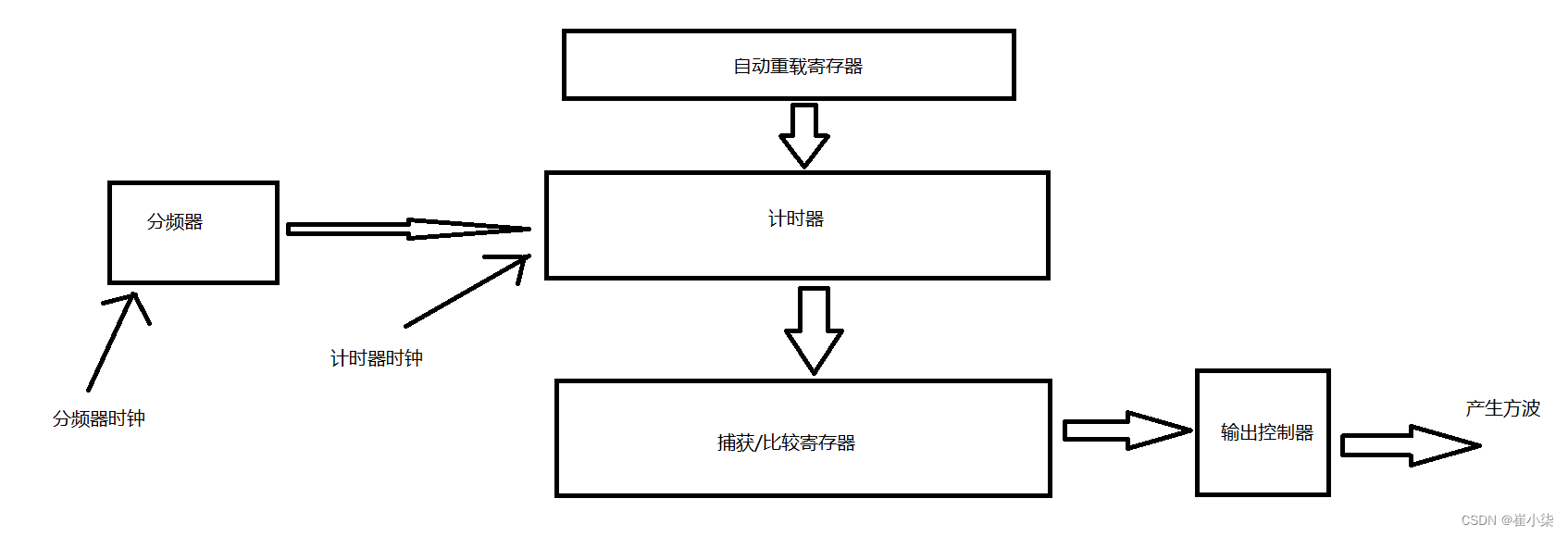
- 设置自动重载寄存器中的值,并将这个值写到计时器中
- 在计时器时钟的驱动下,计时器开始工作
- 在一个时钟周期到来时,计时器中的数据进行+1/-1
- 当计时器中的值加减到等于捕获比较寄存器中的值时,电平反转,产生方波
- 当计时器中的值减到0或加到自动重载寄存器中的值时,自动重载计时器会将值再重载到计时器中或计时器从0开始加,开始下一个时钟周期
TIM4:
设置分频寄存器中的值
设置自动重载寄存器中的值
设置捕获比较寄存器中的值
设置输出比较模式为PWM模式
设置输出比较预加载使能
设置TIM_CH1为输出模式
设置输出极性为低电平
设置捕获比较寄存器使能
设置自动重载预加载使能
设置计时器为递减计时器
设置计时器为边缘对其方式
设置计时器使能
五.代码
#include "../include/spi.h"
#include "../common/include/stm32mp1xx_tim.h"
#include "../include/bbep.h"
void init_beep(){
//初始化RCC
RCC->MP_AHB4ENSETR|=0x1<<1;
RCC->MP_APB1ENSETR|=0x1<<2;
//初始化GPIO
GPIOB->MODER&=(~(0x3<<12));
GPIOB->MODER|=(0x2<<12);
GPIOB->AFRL&=(~(0xf<<24));
GPIOB->AFRL|=(0x2<<24);
//初始化TIM4
TIM4->PSC&=(~0xff); //分频器初始化
TIM4->PSC|=0xd0;
//自动重载寄存器
TIM4->ARR&=(~(0xffff));
TIM4->ARR|=(0x3e8);
//比较捕获寄存器赋值
TIM4->CCR1&=(~(0xffff));
TIM4->CCR1|=(0x2bc);
//捕获比较寄存器模式选择
TIM4->CCMR1&=(~(0xf));
TIM4->CCMR1|=(0x6);
TIM4->CCMR1|=(0x1<<3);
TIM4->CCMR1&=(~(0x3));
//捕获比较寄存器使能
TIM4->CCER&=(~(0x1<<3));
TIM4->CCER|=(0x1<<1);
TIM4->CCER|=(0x1);
TIM4->CR1|=0x1<<7; //定时器初始化
TIM4->CR1&=(~(0x3<<5));
TIM4->CR1|=(0x1<<4);
TIM4->CR1|=0x1;
}
void init_fan(){ //PE9
//初始化RCC
RCC->MP_AHB4ENSETR|=0x1<<4;
RCC->MP_APB2ENSETR|=0x1;
//初始化GPIO
GPIOE->MODER&=(~(0x3<<18));
GPIOE->MODER|=(0x2<<18);
GPIOE->AFRH&=(~(0xf<<4));
GPIOE->AFRH|=(0x1<<4);
//初始化TIM1
TIM1->PSC&=(~0xff); //分频器初始化
TIM1->PSC|=0xd0;
//自动重载寄存器
TIM1->ARR&=(~(0xffff));
TIM1->ARR|=(0x3e8);
//比较捕获寄存器赋值
TIM1->CCR1&=(~(0xffff));
TIM1->CCR1|=(0x2bc);
//捕获比较寄存器模式选择
TIM1->CCMR1&=(~(0xf));
TIM1->CCMR1|=(0x6);
TIM1->CCMR1|=(0x1<<3);
TIM1->CCMR1&=(~(0x3));
//捕获比较寄存器使能
TIM1->CCER&=(~(0x1<<3));
TIM1->CCER|=(0x1<<1);
TIM1->CCER|=(0x1);
TIM1->CR1|=0x1<<7; //定时器初始化
TIM1->CR1&=(~(0x3<<5));
TIM1->CR1|=(0x1<<4);
TIM1->CR1|=0x1;
}
void init_mada(){ //PF6 TIM16 只有边缘对齐模式
//RCC
RCC->MP_AHB4ENSETR|=0x1<<5;
RCC->MP_APB2ENSETR|=0x1<<3;
//GPIO
GPIOF->MODER&=(~(0x3<<12));
GPIOF->MODER|=(0x2<<12);
GPIOF->AFRL&=((0xf<<24));
GPIOF->AFRL|=(0x1<<24);
//TIM16
TIM16->PSC&=(~0xff); //分频器初始化
TIM16->PSC|=0xd0;
//自动重载寄存器
TIM16->ARR&=(~(0xffff));
TIM16->ARR|=(0x3e8);
//比较捕获寄存器赋值
TIM16->CCR1&=(~(0xffff));
TIM16->CCR1|=(0x2bc);
//捕获比较寄存器模式选择
TIM16->CCMR1&=(~(0xf));
TIM16->CCMR1|=(0x6);
TIM16->CCMR1|=(0x1<<3);
TIM16->CCMR1&=(~(0x3));
//捕获比较寄存器使能
TIM16->CCER&=(~(0x1<<3));
TIM16->CCER|=(0x1<<1);
TIM16->CCER|=(0x1);
TIM16->CR1|=0x1<<7; //定时器初始化
TIM16->CR1|=0x1;
//主输出使能
TIM16->BDTR|=(0x1<<15);
}
#include "./include/bbep.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{
int i,j;
for(i = 0; i < ms;i++)
for (j = 0; j < 100; j++);
}
int main(void){
//init();
init_fan();
//init_mada();
while(1){
}
return 0;
}