原理
遥感影像通常具有极高的分辨率和大量的数据量,这就使得全景处理遥感影像成为一项极具挑战的任务。首要的问题是,大规模的遥感影像可能会超过硬件设备,特别是GPU的内存容量。其次,处理大规模遥感影像的计算复杂度非常高,可能会导致处理速度缓慢,效率低下。
在具体的应用中,例如深度学习的训练过程,我们通常需要将遥感影像切割成较小的样本,如512x512像素的图像块,以适应GPU的内存限制。这样的操作不仅可以有效地避免内存溢出,而且可以提高数据处理的速度,因为小图像块的处理速度通常比大图像快。

为了实现这样的分块处理,我们通常会采用双重循环的方式。首先,外层循环负责遍历图像的行,然后内层循环遍历每一行的列。这样,我们就可以逐块地访问和处理图像,而不需要一次性加载整个图像到内存中。这种方法既节省了硬件资源,又提高了数据处理的效率,对于处理大规模的遥感影像具有非常重要的意义。
代码
分块处理的核心部分如下:
# 遍历输入文件的每一个块
for x in range(0, xsize, block_ysize):
if x + block_xsize < xsize:
cols = block_xsize
else:
cols = xsize - x
for y in range(0, ysize, block_ysize):
if y + block_ysize < ysize:
rows = block_ysize
else:
rows = ysize - y
# 读取块的数据
data = in_band.ReadAsArray(x, y, cols, rows)以上代码的运行逻辑是:
-
该代码首先通过外层循环遍历图像的列(x轴),并且每次遍历的步长是
block_xsize。这意味着图像被分割成了宽度为block_xsize的垂直条带。 -
对于每个垂直条带,如果条带的右边界超过了图像的宽度,那么就将条带的宽度设置为从当前位置到图像右边界的距离,否则就使用
block_xsize作为条带的宽度。 -
然后,内层循环遍历当前垂直条带的行(y轴),并且每次遍历的步长是
block_ysize。这意味着垂直条带被进一步分割成了大小为block_xsizexblock_ysize的块。 -
对于每个块,如果块的下边界超过了图像的高度,那么就将块的高度设置为从当前位置到图像下边界的距离,否则就使用
block_ysize作为块的高度。 -
最后,使用
ReadAsArray函数读取当前块的数据。这个函数的参数是块的左上角坐标(x,y)和块的大小(cols,rows),返回的是一个二维数组,包含了块内的所有像素值。
我们具体的例子,进一步展示分块处理,以下是我们的Python函数:
import os
import numpy as np
from osgeo import gdal
# 改变当前工作目录到包含输入文件的文件夹
os.chdir(r'D:\data1\\dem')
# 打开输入的DEM文件
in_ds = gdal.Open('gt30w.tif')
# 获取第一波段的数据
in_band = in_ds.GetRasterBand(1)
# 获取栅格的大小(行数和列数)
xsize = in_band.XSize
ysize = in_band.YSize
# 获取波段的块大小
block_xsize, block_ysize = in_band.GetBlockSize()
# 获取无数据值
nodata = in_band.GetNoDataValue()
# 创建输出的DEM文件,设置其大小、数据类型等与输入文件相同
out_ds = in_ds.GetDriver().Create(
'dem_feet.tif', xsize, ysize, 1, in_band.DataType)
# 设置投影和地理变换参数与输入文件相同
out_ds.SetProjection(in_ds.GetProjection())
out_ds.SetGeoTransform(in_ds.GetGeoTransform())
# 获取输出文件的第一波段
out_band = out_ds.GetRasterBand(1)
# 遍历输入文件的每一个块
for x in range(0, xsize, block_ysize):
if x + block_xsize < xsize:
cols = block_xsize
else:
cols = xsize - x
for y in range(0, ysize, block_ysize):
if y + block_ysize < ysize:
rows = block_ysize
else:
rows = ysize - y
# 读取块的数据
data = in_band.ReadAsArray(x, y, cols, rows)
# 将米转换为英尺
data = np.where(data == nodata, nodata, data * 3.28084)
# 写入转换后的数据到输出文件
out_band.WriteArray(data, x, y)
# 将缓存的数据写入磁盘
out_band.FlushCache()
# 设置输出文件的无数据值
out_band.SetNoDataValue(nodata)
# 计算输出文件的统计信息
out_band.ComputeStatistics(False)
# 生成输出文件的概览图
out_ds.BuildOverviews('average', [2, 4, 8, 16, 32])
# 删除输出文件对象,关闭文件
del out_ds这个脚本的主要部分是一个双层的循环,遍历输入文件的每一个块。对于每一个块,它先读取数据,然后将单位从米转换为英尺,然后将转换后的数据写入到输出文件。
这个过程使用了NumPy的where函数,它可以根据一个条件来选择数组的元素。在这里,它用于保留无数据值不变,而将其他的值乘以3.28084(米到英尺的转换系数)。
附上同款CPP代码
#include <iostream>
#include <string>
#include <gdal_priv.h>
int main()
{
GDALAllRegister();
// 打开输入的DEM文件
GDALDataset *in_ds = (GDALDataset*) GDALOpen("D:\\data1\\dem\\gt30w.tif", GA_ReadOnly);
if (in_ds == NULL) {
std::cerr << "Failed to open input dataset\n";
return 1;
}
// 获取第一波段的数据
GDALRasterBand *in_band = in_ds->GetRasterBand(1);
// 获取栅格的大小(列数和行数)
int xsize = in_band->GetXSize();
int ysize = in_band->GetYSize();
// 获取波段的块大小
int block_xsize, block_ysize;
in_band->GetBlockSize(&block_xsize, &block_ysize);
// 获取无数据值
int nodata;
in_band->GetNoDataValue(&nodata);
// 创建输出的DEM文件,设置其大小、数据类型等与输入文件相同
GDALDataset *out_ds = in_ds->GetDriver()->Create("D:\\data1\\dem\\dem_feet.tif", xsize, ysize, 1, in_band->GetRasterDataType());
if (out_ds == NULL) {
std::cerr << "Failed to create output dataset\n";
return 1;
}
// 设置投影和地理变换参数与输入文件相同
out_ds->SetProjection(in_ds->GetProjectionRef());
out_ds->SetGeoTransform(in_ds->GetGeoTransform());
// 获取输出文件的第一波段
GDALRasterBand *out_band = out_ds->GetRasterBand(1);
// 遍历输入文件的每一个块
for (int x = 0; x < xsize; x += block_xsize) {
int cols = (x + block_xsize < xsize) ? block_xsize : xsize - x;
for (int y = 0; y < ysize; y += block_ysize) {
int rows = (y + block_ysize < ysize) ? block_ysize : ysize - y;
// 读取块的数据
float *data = new float[cols * rows];
in_band->RasterIO(GF_Read, x, y, cols, rows, data, cols, rows, GDT_Float32, 0, 0);
// 将米转换为英尺
for (int i = 0; i < cols * rows; i++) {
if (data[i] != nodata) {
data[i] *= 3.28084;
}
}
// 写入转换后的数据到输出文件
out_band->RasterIO(GF_Write, x, y, cols, rows, data, cols, rows, GDT_Float32, 0, 0);
delete[] data;
}
}
// 将缓存的数据写入磁盘
out_band->FlushCache();
// 设置输出文件的无数据值
out_band->SetNoDataValue(nodata);
// 计算输出文件的统计信息
int bApproxOK;
out_band->ComputeStatistics(0, NULL, NULL, NULL, NULL, &bApproxOK);
// 生成输出文件的概览图
out_ds->BuildOverviews("AVERAGE", NULL);
// 关闭文件
GDALClose((GDALDatasetH) in_ds);
GDALClose((GDALDatasetH) out_ds);
return 0;
}小结
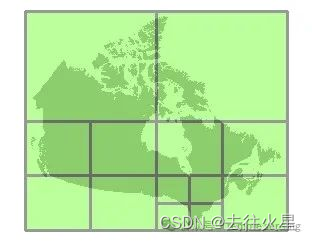
分块处理有没有缺陷?
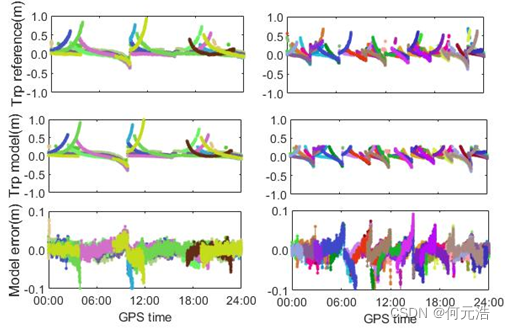
其实是有的,比如,请看下图

处理数据时参数选择不一样导致块与块之间出现了明显的尾痕。
一般解决的方式就是处理局部块数据使用全局参数。
此外,问一个问题?为什么要学cpp的代码呢?因为cpp的速度比python的运行速度要快得多。python可以作为前期的技术验证,工程化落地的话还是改写为CPP更稳妥。