【ripro美化】全站美化包WordPress RiPro主题二开美化版sucaihu-childV1.9(功能集成到后台)
news2026/2/16 11:40:36
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1553298.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

无需麻烦:电脑如何轻松管理和同步iPhone应用
轻松实现电脑对iPhone应用管理 摘要
本文介绍了如何使用克魔助手工具实现电脑对手机应用的管理操作。通过简单的步骤,用户可以批量操作手机应用、运行应用、查看应用日志以及安装测试IPA包,提高工作效率和方便管理手机应用。
引言
在日常工作中&#…

智慧公厕解决方案打造更加智能的卫生空间
一、智慧公厕方案概述
智慧公厕方案旨在解决现有公厕存在的诸多问题,包括民众用厕困难、环境卫生状况不佳、管理效率低下等方面。针对民众的需求和管理方面的挑战,智慧公厕提供了一套综合解决方案,包括智能导航、环境监测、资源管理等功能&a…
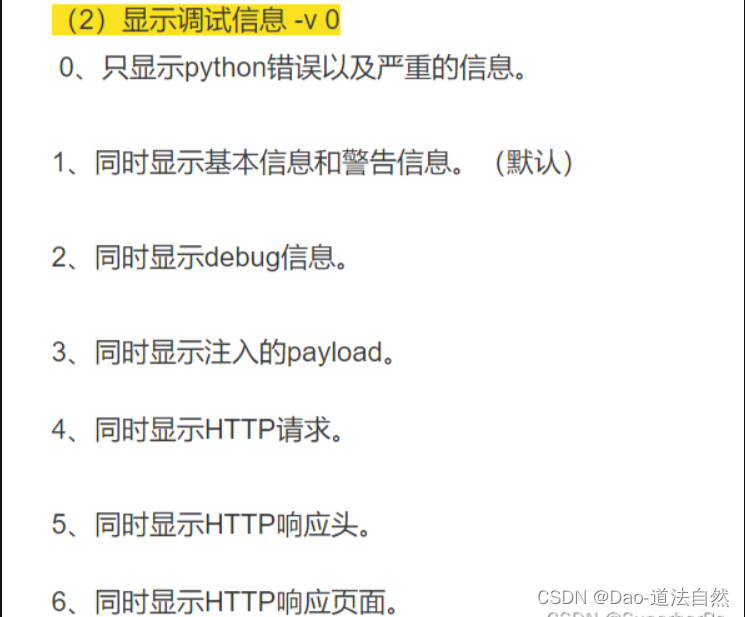
Day46:WEB攻防-注入工具SQLMAPTamper编写指纹修改高权限操作目录架构
目录
数据猜解-库表列数据&字典
权限操作-文件&命令&交互式
提交方法-POST&HEAD&JSON
绕过模块-Tamper脚本-使用&开发
分析拓展-代理&调试&指纹&风险&等级 知识点: 1、注入工具-SQLMAP-常规猜解&字典配置 2、注入…

2024.3.28学习笔记
今日学习韩顺平java0200_韩顺平Java_对象机制练习_哔哩哔哩_bilibili
今日学习p286-p294
继承
继承可以解决代码复用,让我们的编程更加靠近人类思维,当多个类存在相同的属性和方法时,可以从这些类中抽象出父类,在父类中定义这些…
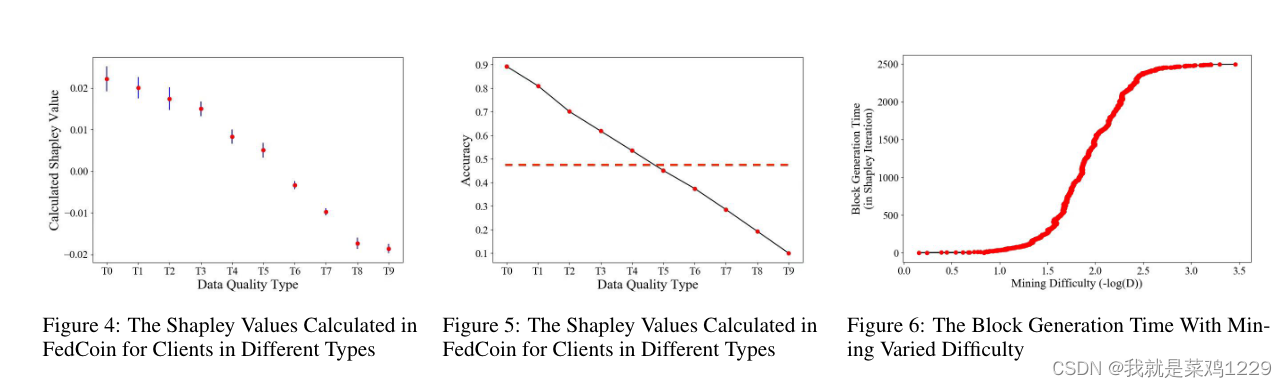
【FedCoin: A Peer-to-Peer Payment System for Federated Learning】
在这篇论文中,我们提出了FedCoin,一个基于区块链的点对点支付系统,专为联邦学习设计,以实现基于Shapley值的实际利润分配。在FedCoin系统中,区块链共识实体负责计算SV,并且新的区块是基于“Shapley证明”&a…
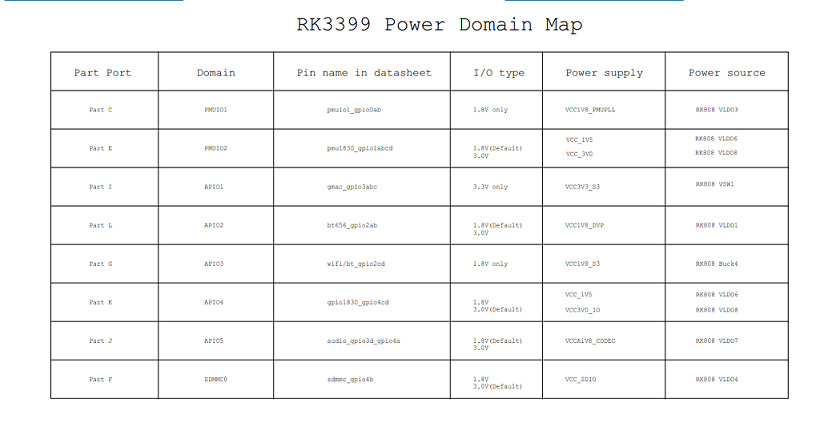
6.2物联网RK3399项目开发实录-驱动开发之GPIO使用(wulianjishu666)
物联网嵌入式开发源码例程:
链接:https://pan.baidu.com/s/1B3oqq5QBhN-VmTFt9CI-7A?pwd2ihg
*******************************************************************************************
GPIO 使用
简介
GPIO, 全称 General-Purpose Input/…
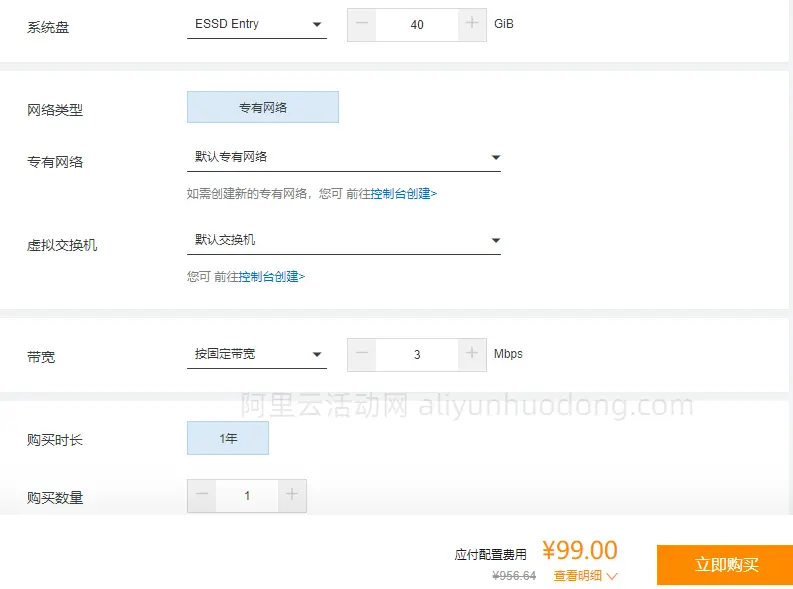
如何购买阿里云服务器?2024年阿里云服务器购买流程分享
很多新手用户不知道阿里云服务器购买的流程,不清楚该如何选购云服务器配置才能既满足需求又不会掉“坑”里,为此笔者整理了2024年购买阿里云服务器的完整流程,分为通过云服务器ECS产品页下单购买和通过阿里云活动购买云服务器两种最常见的购买…

使用pytorch构建一个初级的无监督的GAN网络模型
在这个系列中将系统的构建GAN及其相关的一些变种模型,来了解GAN的基本原理。本片为此系列的第一篇,实现起来很简单,所以不要期待有很好的效果出来。 第一篇我们搭建一个无监督的可以生成数字 (0-9) 手写图像的 GAN,使用MINIST数据…
【vue核心技术实战精讲】1.9 Vue指令之v-model双向数据绑定
文章目录 前言本节内容1、v-model2、总结v-model 双向的数据绑定双向数据流(绑定) v-bind 和 v-model 的区别? 3-1、实战 <input>A、 输入框 type"text"示例效果 B、 单选按钮 type"radio"示例效果 C、 复选框 type"che…

|行业洞察·医药|《医药行业年终总结报告:政策篇-143页》
报告各部分的详细解读:
1. 政策概览
政策导读:2023年作为“十四五”发展时期的第三年,国家发布了许多关键性文件,对医药行业的采购、医保、医疗、医药等方面提出了明确的目标和规划。政策发布情况:截至12月19日&…
![[LeetCode]516. 最长回文子序列[记忆化搜索解法详解]](https://img-blog.csdnimg.cn/direct/2cbacc4b97c94c4683b544b74f57767c.png)
[LeetCode]516. 最长回文子序列[记忆化搜索解法详解]
最长回文子序列
LeetCode 原题链接
题目 给你一个字符串 s ,找出其中最长的回文子序列,并返回该序列的长度。
子序列定义为:不改变剩余字符顺序的情况下,删除某些字符或者不删除任何字符形成的一个序列。
示例 1:…

苹果应用商店上架工具的最新趋势与未来发展展望
摘要
移动应用app上架是开发者关注的重要环节,但常常会面临审核不通过等问题。为帮助开发者顺利完成上架工作,各种辅助工具应运而生。本文探讨移动应用app上架原理、常见辅助工具功能及其作用,最终指出合理使用工具的重要性。
引言
移动应…

YonBuilder移动开发基础——友开发App与自定义Loader
概述
在使用 YonBuilder移动开发 技术进行 App 项目开发时,我们需要使用YonStuido开发工具的 WIFI同步 功能进行项目代码的真机调试,友开发App 与 自定义Loader 都支持 WIFI同步 功能,那么两款 App 软件到底有什么区别,在开发过程…

C语言 | qsort()函数使用
目录:
1.qsort介绍
2.使⽤qsort函数 排序 整型数据
3.使⽤qsort函数 排序 结构体数据
4. qsort函数的模拟实现冒泡排序 qsort()函数 是一个 C语言编译器函数库自带的排序函数, 它可以对指定数组(包括字符串,二维数组&#x…
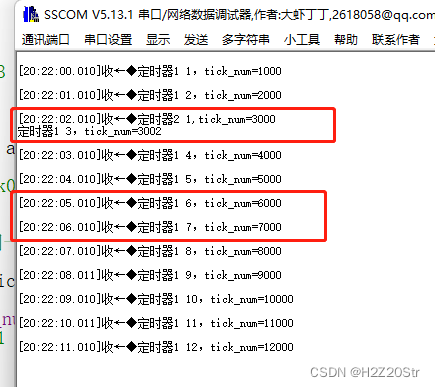
STM32CubeMX学习笔记28---FreeRTOS软件定时器
一、软件定时器简介
1 、基本概念 定时器,是指从指定的时刻开始,经过一个指定时间,然后触发一个超时事件,用户 可以自定义定时器的周期与频率。类似生活中的闹钟,我们可以设置闹钟每天什么时候响, 还能设置…
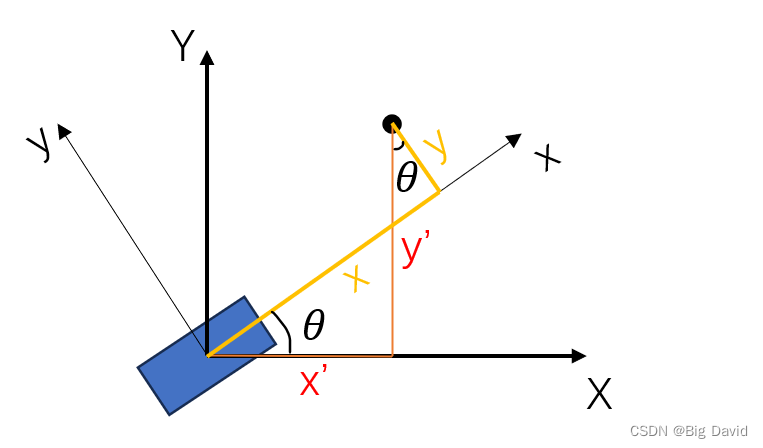
【车体坐标系与世界坐标系的互相转换】能够一眼看懂的知识点!!!
本文讲解车体坐标系与世界坐标系互相转换的数学推导,如下图所示 将waypoint坐标从车体坐标系转换到世界坐标系: [ x ′ y ′ z ′ ] [ x y z ] [ cos θ sin θ 0 − sin θ cos θ 0 0 0 1 ] \left[\begin{array}{lll} x^{\prime} & …

![axios发送get请求但参数中有数组导致请求路径多出了“[]“的处理办法](https://img-blog.csdnimg.cn/direct/c3d6be1c61014d6889eac5fa33fb5b74.png)
axios发送get请求但参数中有数组导致请求路径多出了“[]“的处理办法
一、情况
使用axios发送get请求携带了数组参数时,请求路径中就会多出[]字符,而在后端也会报错 二、解决办法
1、安装qs
当前项目的命令行中安装
npm install qs2、引入qs库(使用qs库来将参数对象转换为字符串)
// 全局
import qs from qs
Vue.proto…

WPF中获取TreeView以及ListView获取其本身滚动条进行滚动
实现自行调节scoll滚动的位置(可相应获取任何控件中的内部滚动条)
TreeView:TreeViewAutomationPeer lvap new TreeViewAutomationPeer(treeView);
var svap lvap.GetPattern(PatternInterface.Scroll) as ScrollViewerAutomationPeer;
var scroll svap.Owner as ScrollVie…