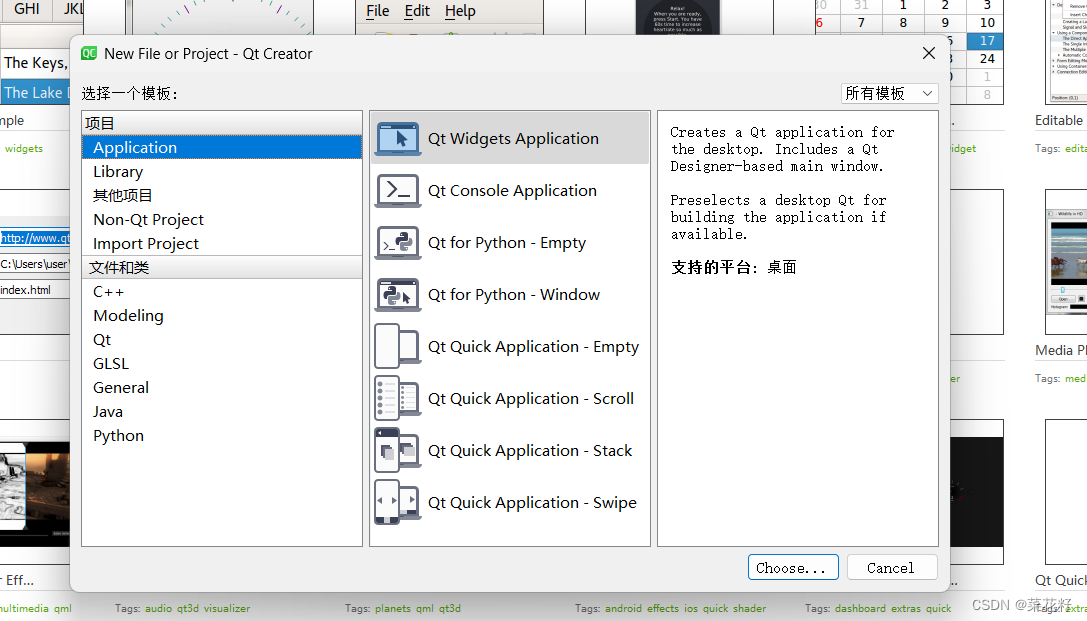
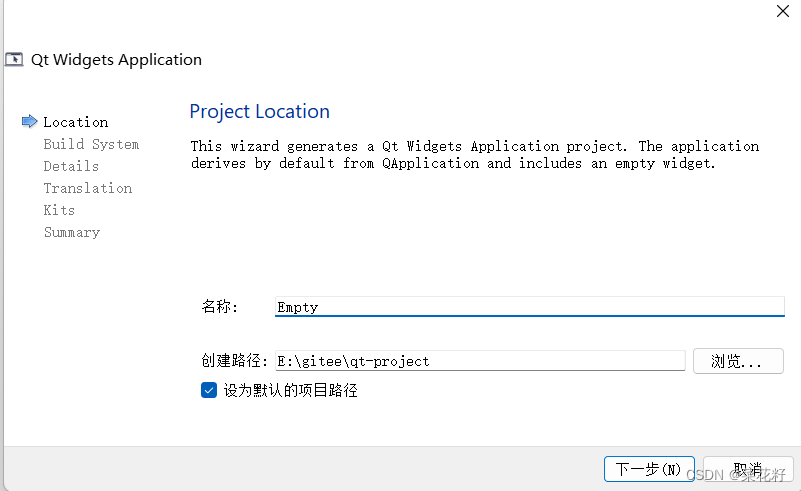
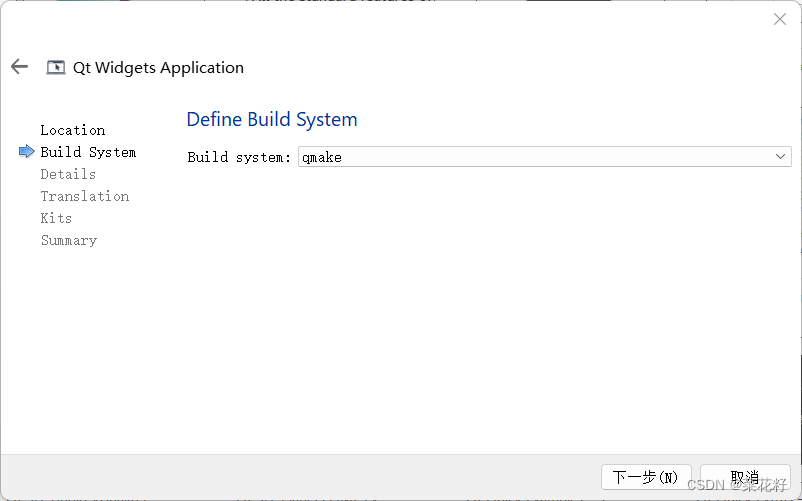
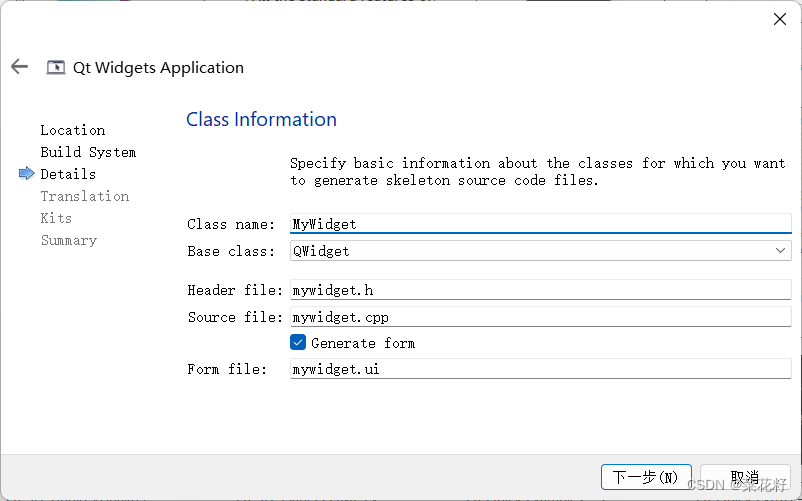
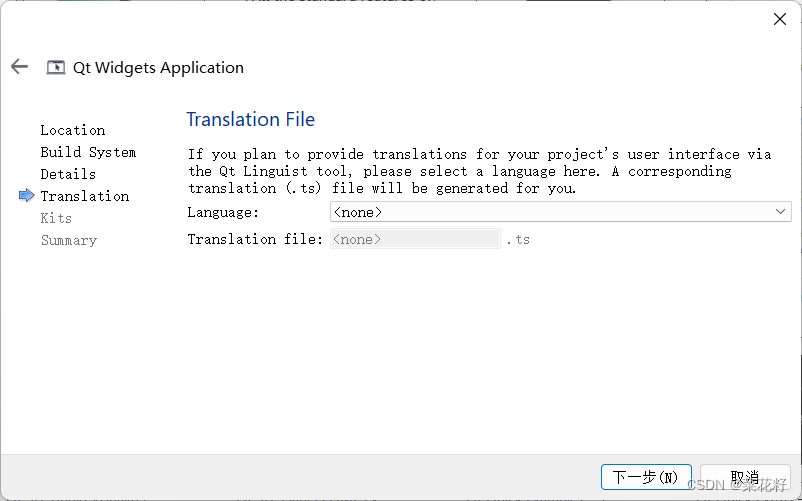
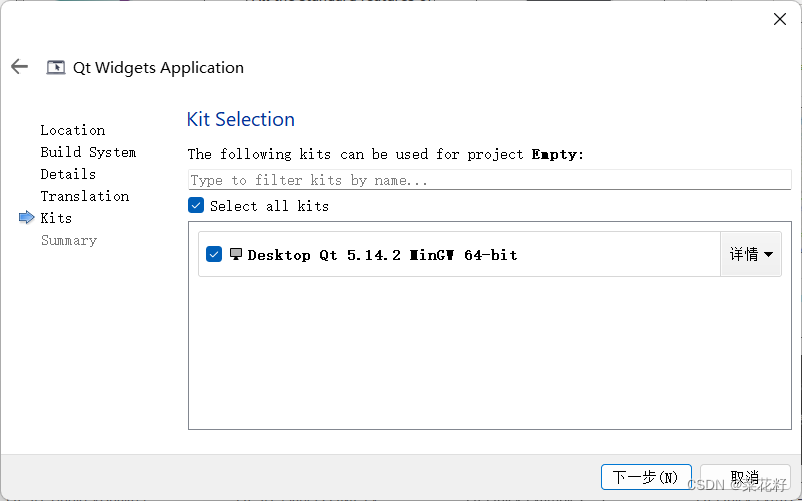
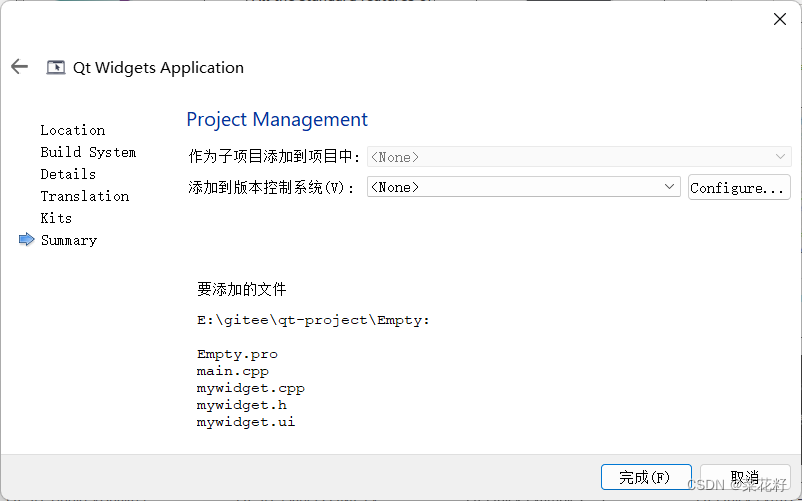
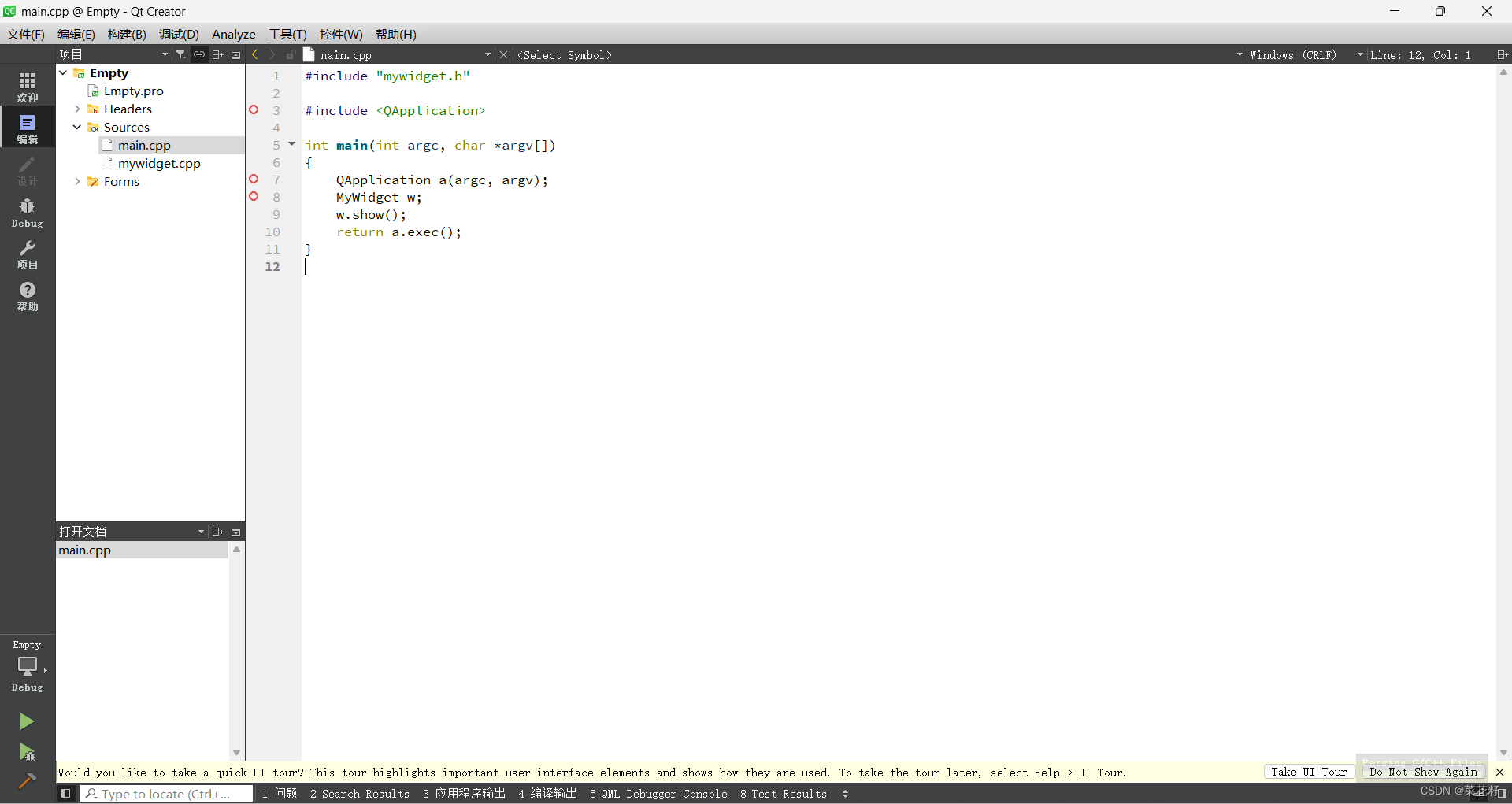
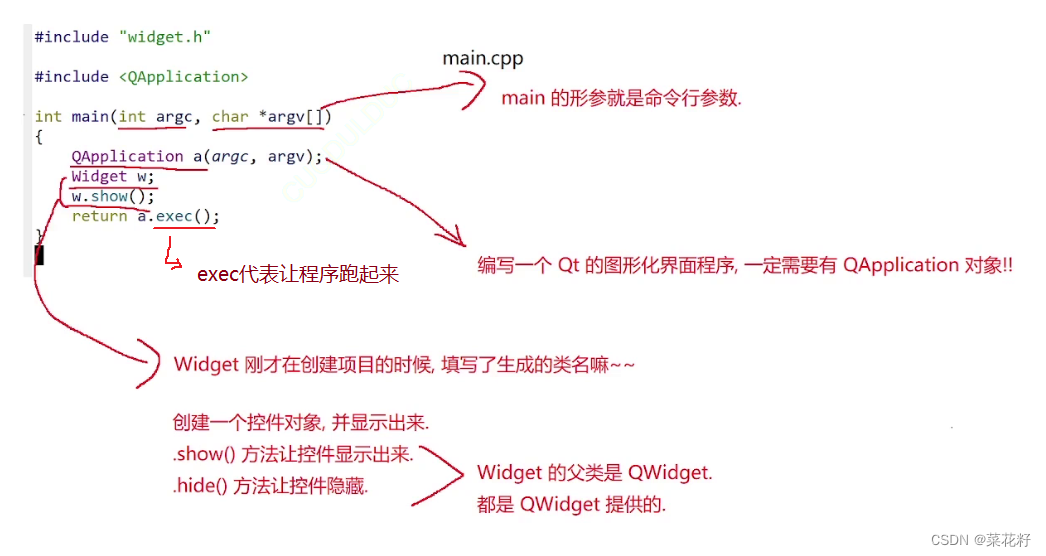
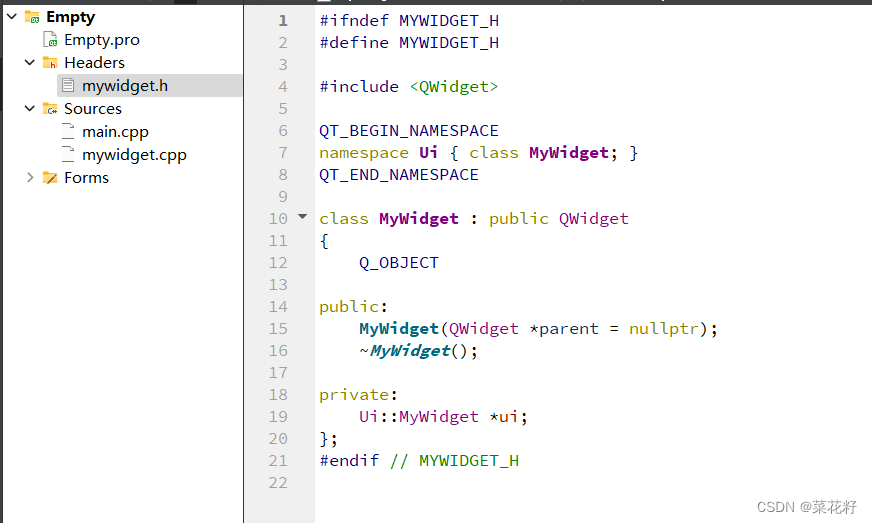
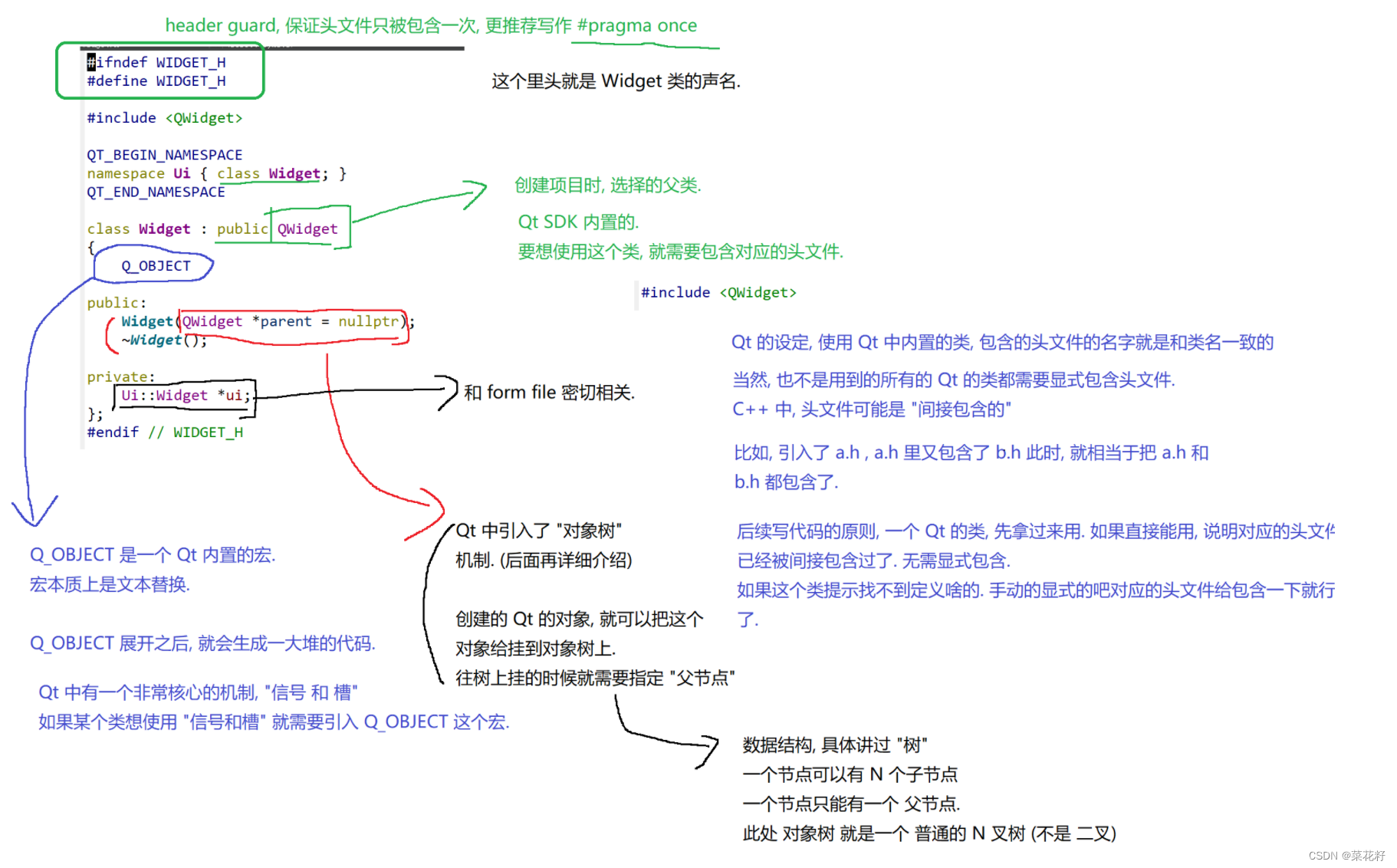
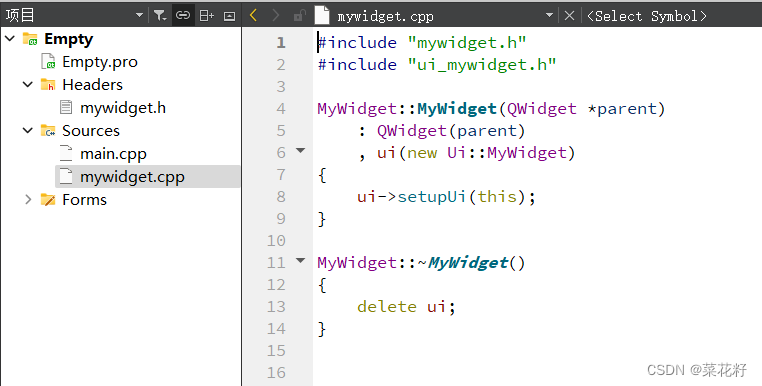
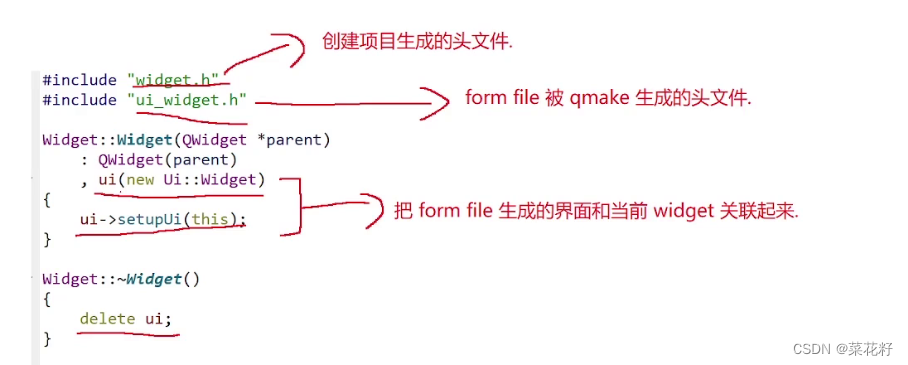
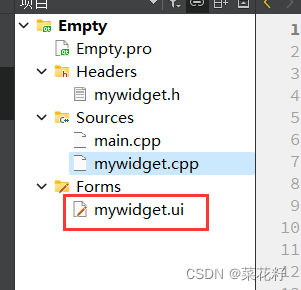
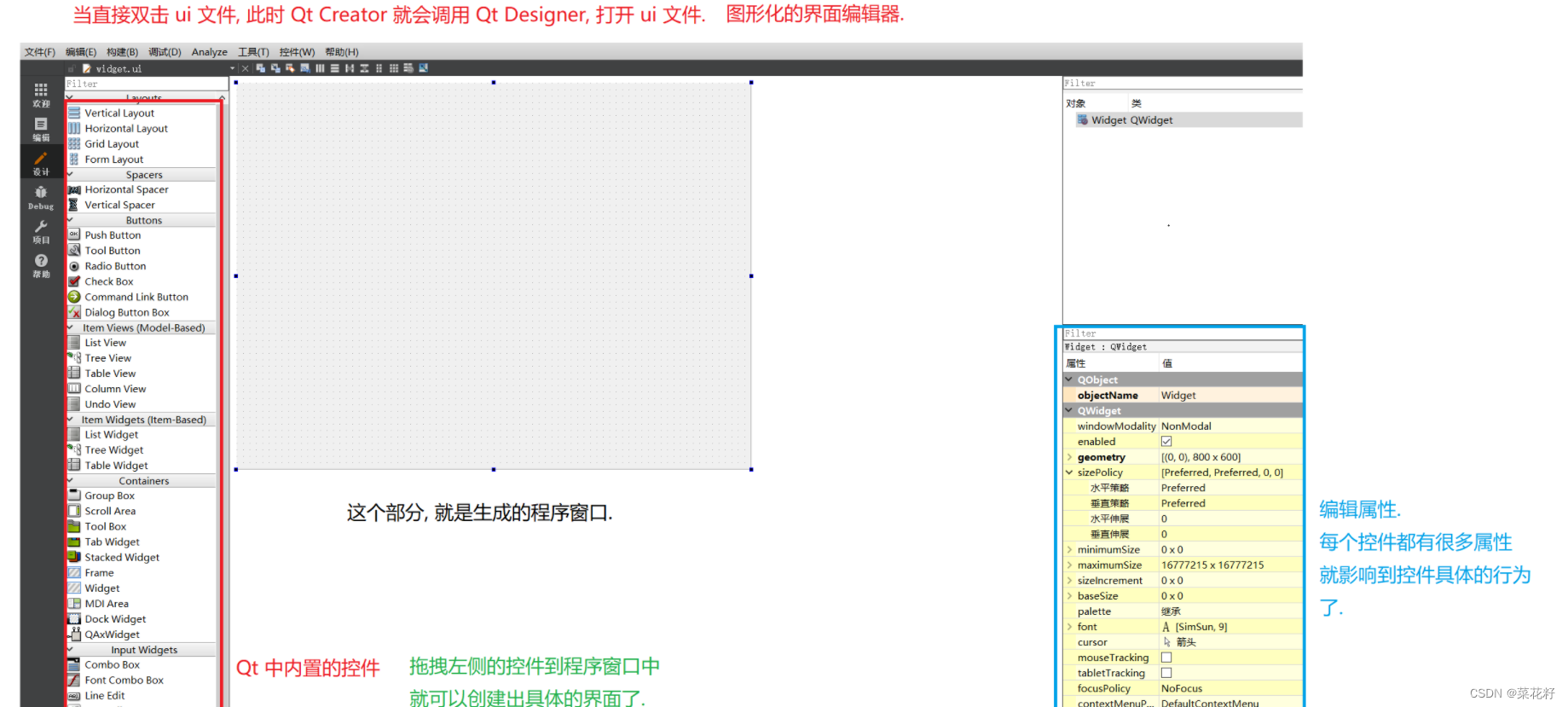
【QT】:基本框架
news2026/2/14 19:32:17

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1550328.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
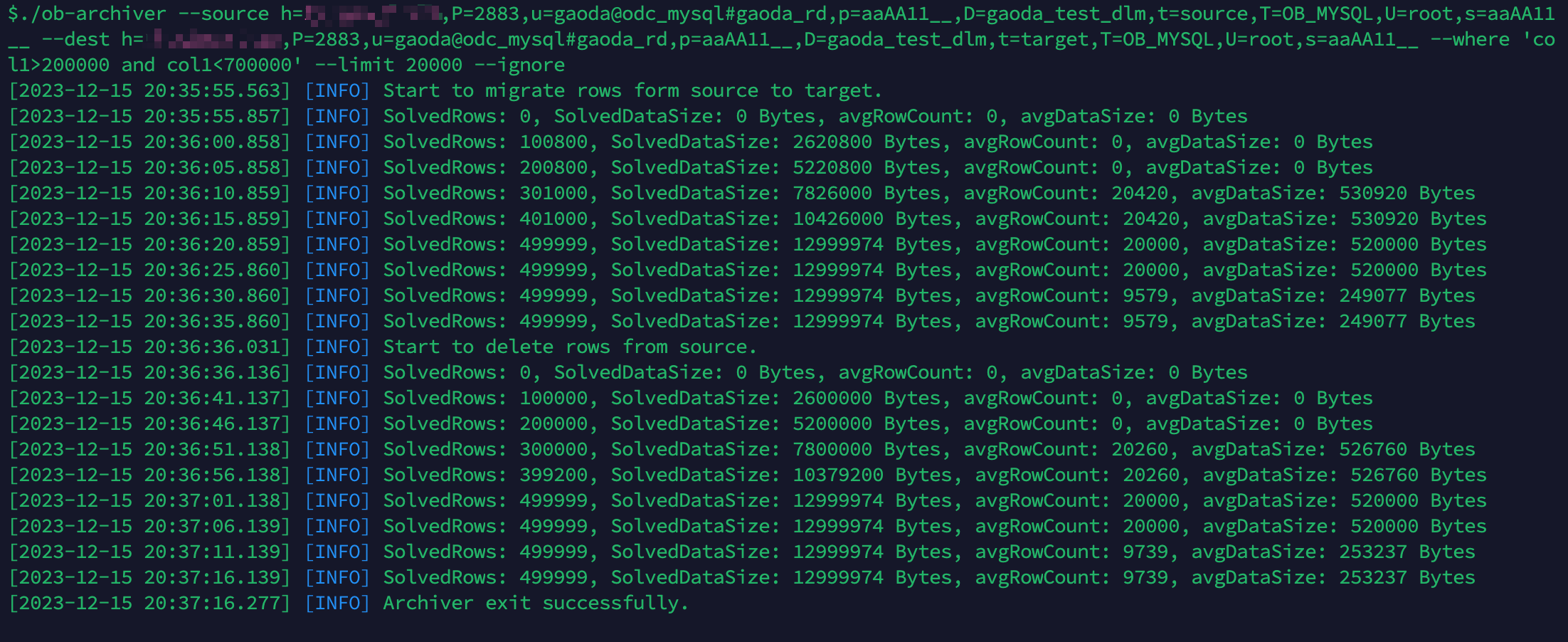
pt-archiver的实践分享,及为何要用 ob-archiver 归档数据的探讨
作者简介:肖杨,软件开发工程师 在数据密集型业务场景中,数据管理策略是否有效至关重要,它直接关系到系统性能与存储效率的提升。数据归档作为该策略的关键环节,不仅有助于优化数据库性能,还能有效降低存储成…
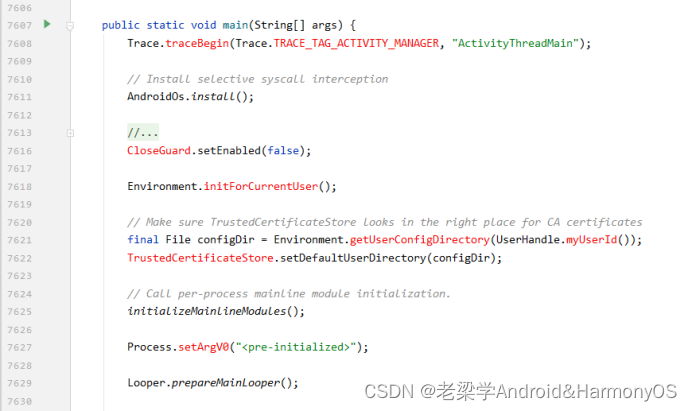
Android-Handler详解_使用篇
本文我将从Handler是什么、有什么、怎们用、啥原理,四个方面去分析。才疏学浅,如有错误,欢迎指正,多谢。
1.是什么
因为Android系统不允许在子线程访问UI组件,否则就会抛出异常。所以咱们平实用的最多的可能是在子线…
「媒体宣传」如何针对不同行业制定媒体邀约方案
传媒如春雨,润物细无声,大家好,我是51媒体网胡老师。
针对不同行业制定媒体邀约方案时,需要考虑行业特点、目标受众、媒体偏好以及市场趋势等因素。
一、懂行业 先弄清楚你的行业是啥样,有啥特别之处。 了解行业的热…
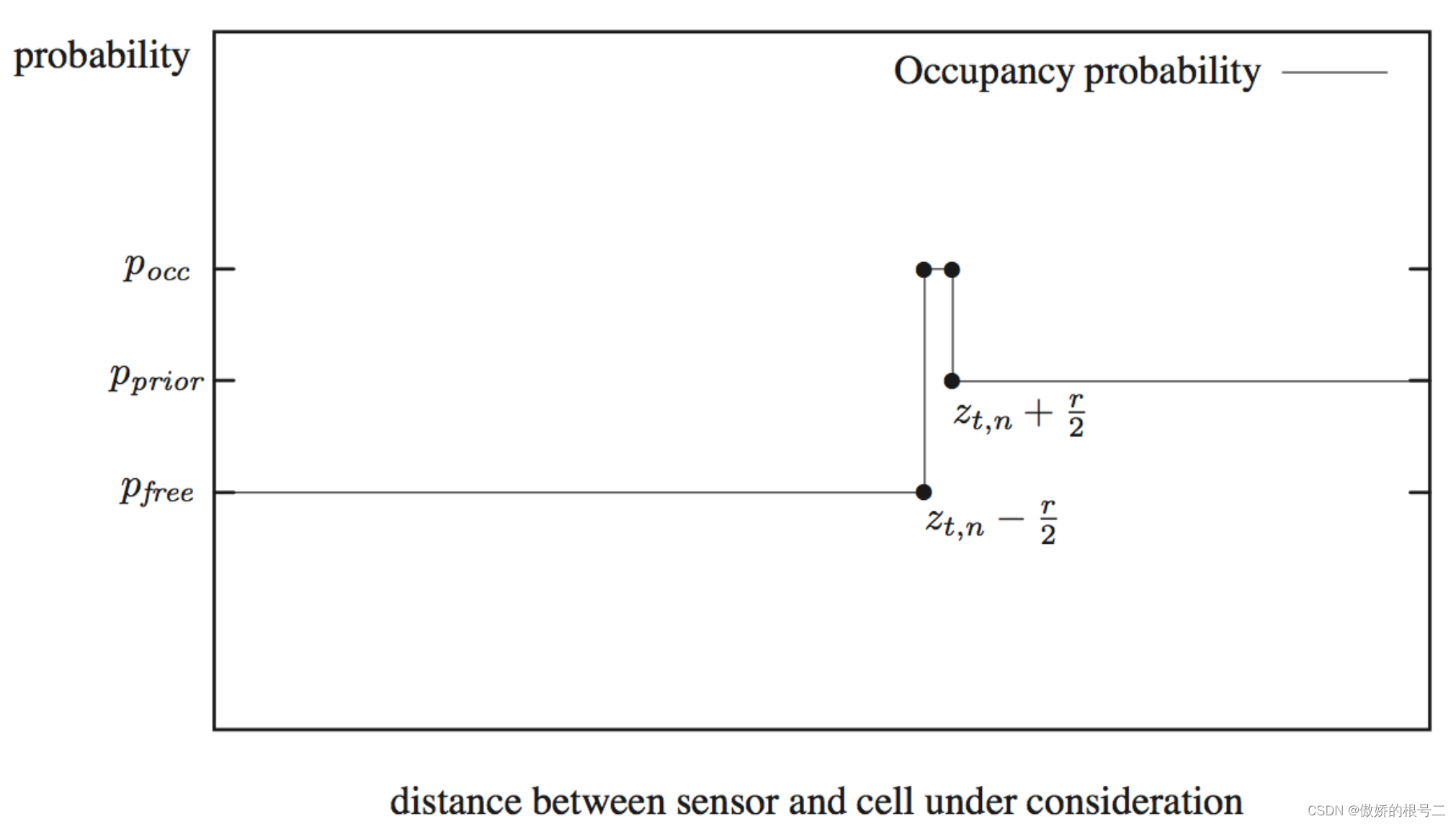
【地图构建(1)】占用栅格地图构建Occupancy grid mapping
本文主要参考Probabilistic Robotics《概率机器人》一书。 其他参考: 弗莱堡大学课件 博客 含代码博客
0.引言
位姿已知的地图构建(mapping with known poses)的定义:已知机器人的位姿 x 1 : t x_{1:t} x1:t和传感器的观测数据 z 1 : t z_{1:t} z1:t…
绝地求生:报告长官!速去领取PUBG7周年礼包及7周年活动攻略【附方法】
奖励都需要长官们绑定全球账号,在游戏个人资料处查看是否有绑定! PUBG七周年礼包详情:
包含7周年快乐甜筒帽
7周年快乐背包(3级)
戴墨镜的幽灵
黑货票券 x30
档案管理员宝箱 x1
钥匙 x1 绑定ID登录,或…
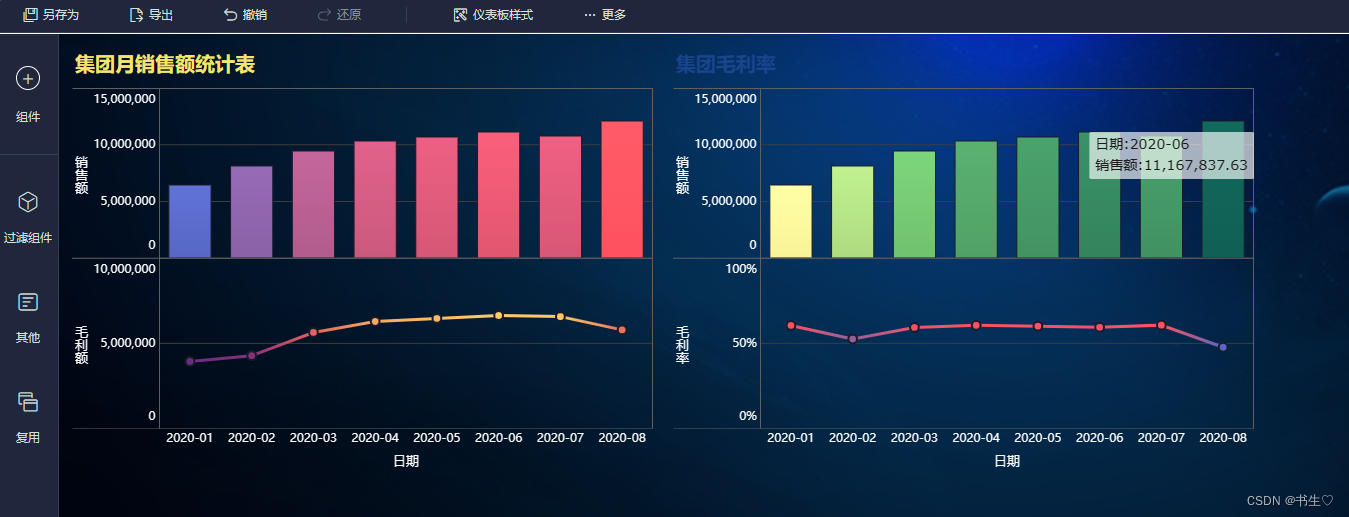
【FIneBI可视化工具的使用】
前言: 💞💞大家好,书生♡,今天主要和大家分享一下可视化的工具FineBI的详细使用,希望对大家有所帮助。感谢大家关注点赞。 💞💞前路漫漫,希望大家坚持下去,不忘初心&…
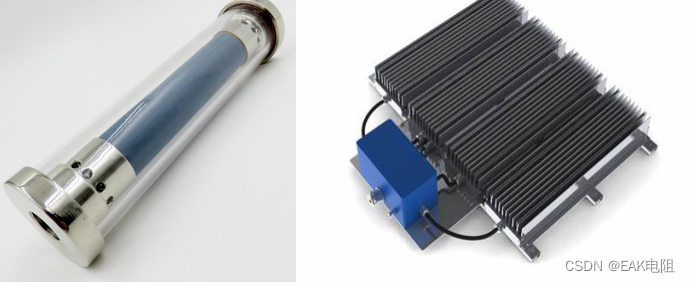
大型驱动水冷负载电阻、缓冲器、滤波器和快速放电电阻
EAK业界首创双面水冷负载电阻器,独特的设计,用户更方便的串联并联使用,强大的水流带走更多因充放电带来的热量。AlN高可靠性氮化铝基板保证了热膨胀不会影响电阻的工作。 液冷电阻器使用水或离子水作为冷却剂。通过添加乙二醇,可以…

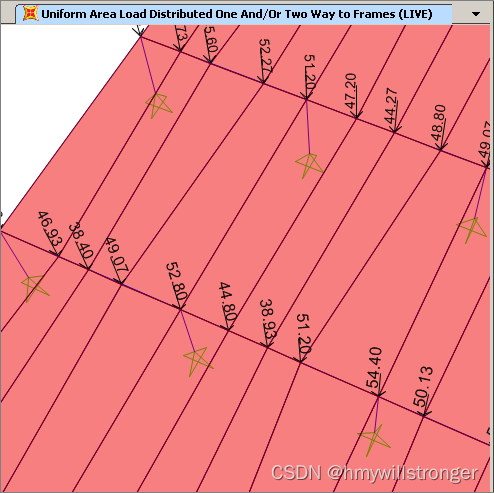
【SAP2000】在框架结构中应用分布式面板荷载Applying Distributed Panel Loads to Frame Structures
在框架结构中应用分布式面板荷载
Applying Distributed Panel Loads to Frame Structures
使用"Uniform to Frame"选项,可以简单地将荷载用于更多样化的情况。 With the “Uniform to Frame” option, loads can be easily used for a greater diversity of situat…
【书生·浦语大模型实战营第二期】学习笔记1
1. Introduction
开源llm举例:LLaMA 、Qwen 、Mistral 和Deepseek 大型语言模型的发展包括预训练、监督微调(SFT)和基于人类反馈的强化学习(RLHF)等主要阶段 InternLM2的显著特点
采用分组查询注意力(GQA…

蓝桥杯基础练习汇总详细解析(三)——字母图形、01字符串、闰年判断(详细解题思路、代码实现、Python)
试题 基础练习 字母图形
提交此题 评测记录
资源限制
内存限制:256.0MB C/C时间限制:1.0s Java时间限制:3.0s Python时间限制:5.0s
问题描述
利用字母可以组成一些美丽的图形,下面给出了一个例子&#…
web开发发展历程-前端、后端、消息队列、后端架构演进
文章目录 摘要主要内容不同的时代对应不同的技术前端技术的中间阶段-单页面应用前后端分离后端技术演化-云计算平台总体趋势反应式编程 消息队列发展史kafka,rocketmq,pulsar网易后端架构演进架构瓶颈数据库瓶颈服务器瓶颈数据库缓存瓶颈-缓存击穿、雪崩…
Spring Boot:Web开发之三大组件的整合
Spring Boot 前言Spring Boot 整合 ServletSpring Boot 整合 FilterSpring Boot 整合 Listener 前言
在 Web 开发中,Servlet 、Filter 和 Listener 是 Java Web 应用中的三大组件。Servlet 是 Java 代码,通过 Java 的 API 动态的向客户端输出内容。Filt…
7.3*3卷积核生成
1.卷积核 在数字图像处理中的各种边沿检测、滤波、腐蚀膨胀等操作都离不开卷积核的生成。下面介绍如何生成各种3X3的卷积核。为后面的数字图像操作打下基础。 由于图像经过卷积操作后会减少两行两列,因此在生成卷积核的时候一般会对图像进行填充,填充…
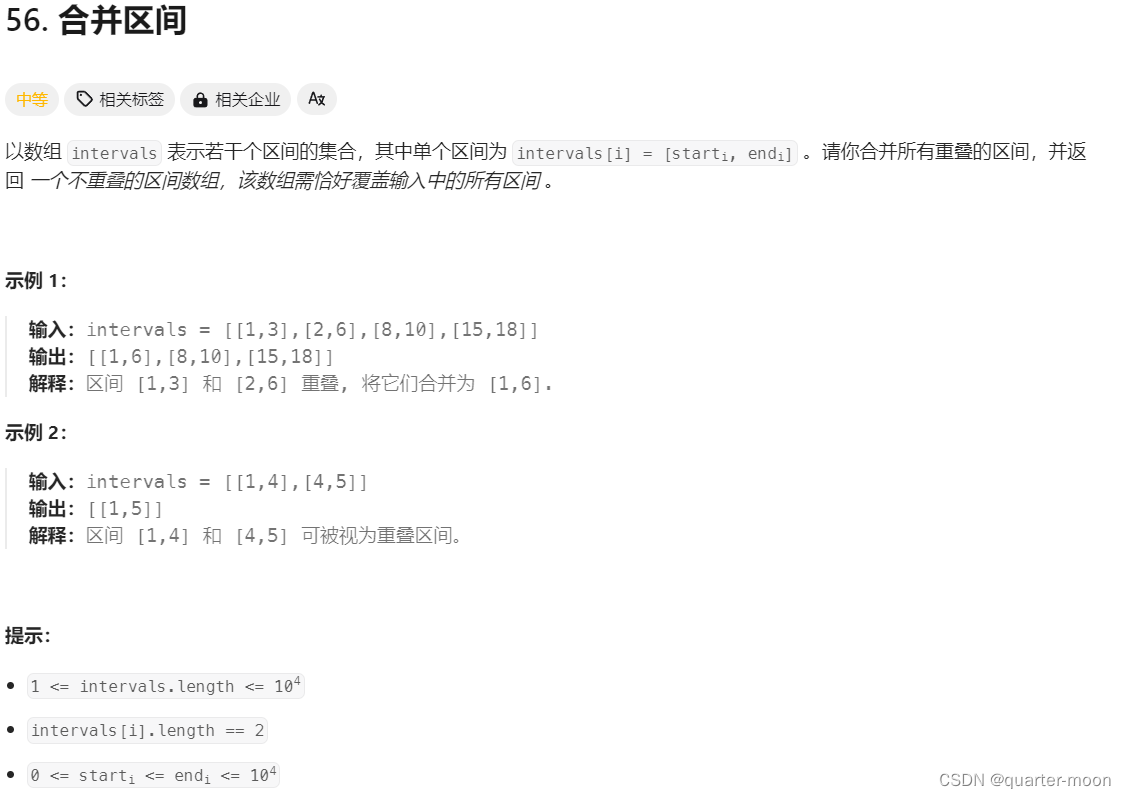
day 36 贪心算法 part05● 435. 无重叠区间 ● 763.划分字母区间 ● 56. 合并区间
一遍过。首先把区间按左端点排序,然后右端点有两种情况。
假设是a区间,b区间。。。这样排列的顺序,那么
假设a[1]>b[0],如果a[1]>b[1],就应该以b[1]为准,否则以a[1]为准。
class Solution {
public:static bo…

一个基于.NET Core构建的简单、跨平台、模块化的商城系统
前言
今天大姚给大家分享一个基于.NET Core构建的简单、跨平台、模块化、完全开源免费(MIT License)的商城系统:Module Shop。
商城后台管理端功能 商品:分类、品牌、单位、选项(销售属性)、属性、属性模…
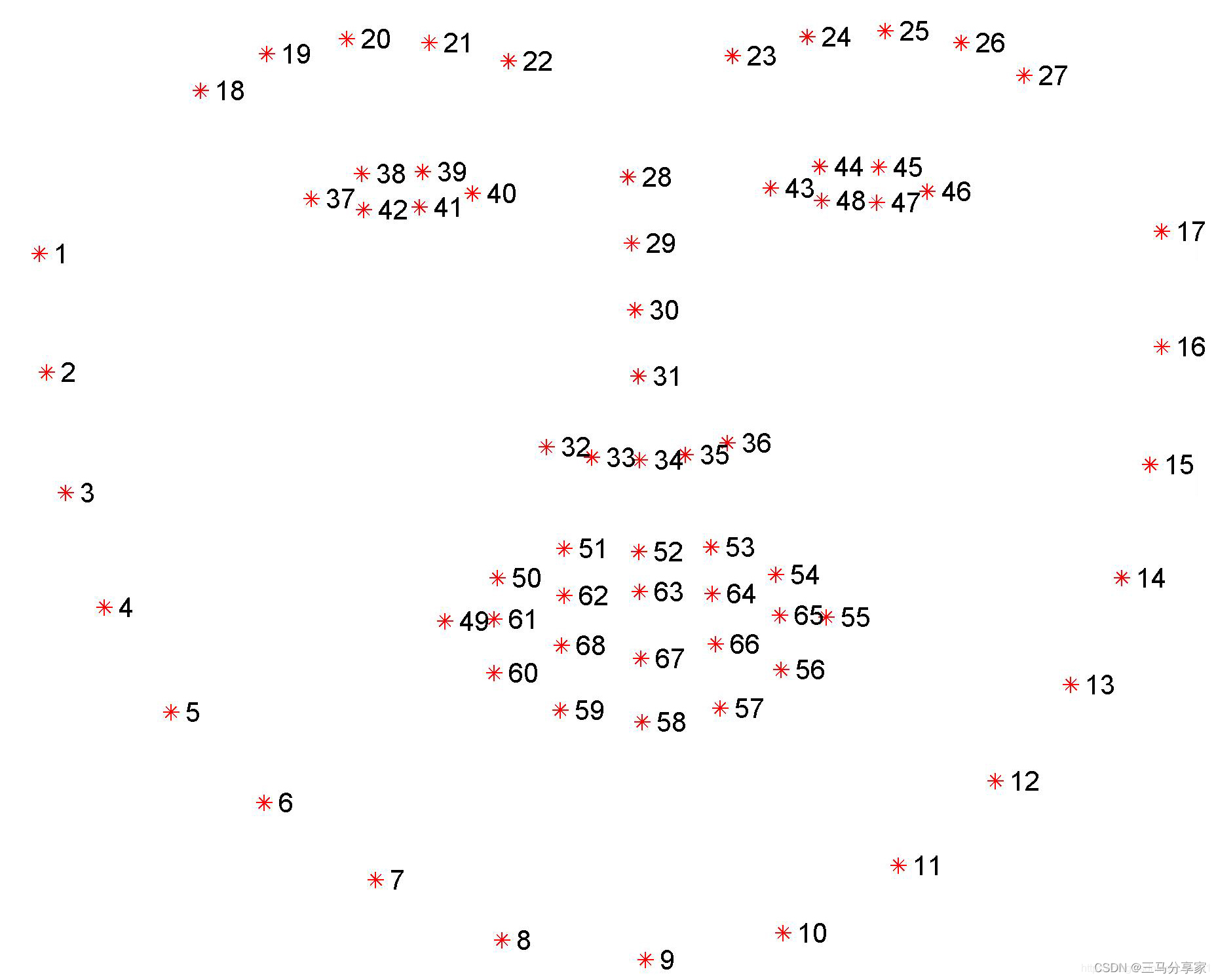
人脸68关键点与K210疲劳检测
目录
人脸68关键点检测
检测闭眼睁眼
双眼关键点检测
计算眼睛的闭合程度:
原理:
设置阈值进行判断
实时监测和更新
拓展:通过判断上下眼皮重合程度去判断是否闭眼
检测嘴巴是否闭合
提取嘴唇上下轮廓的关键点
计算嘴唇上下轮廓关键点之间的距…

LangChain入门:2.OpenAPI调用ChatGPT模型
快速入门
本篇文章正式进入LangChain的编码阶段,今天实现的功能是使用OpenAPI调用ChatGPT模型来进行文本问答。
1. 申请OpenAPI的访问令牌
这里介绍两种获取到OpenAPI访问令牌的方式,大家按照自己需求进行选择,之后的文章我会基于第二种选…
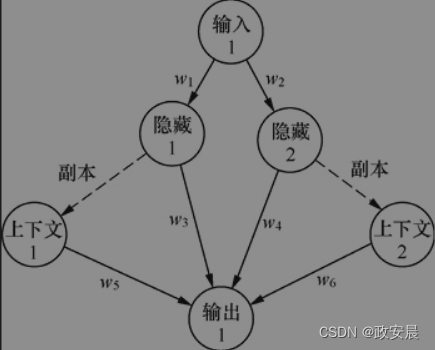
政安晨:【深度学习神经网络基础】(二)—— 神经元与层
政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: 政安晨的机器学习笔记 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正! 神经元是深度学习神经网络中的基本单元,模拟了…
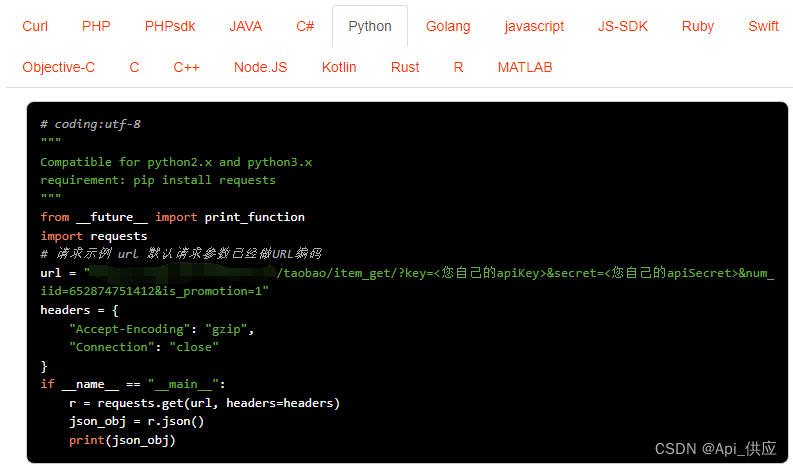
淘宝详情数据采集(商品上货,数据分析,属性详情,价格监控),海量数据值得get
淘宝详情数据采集涉及多个环节,包括商品上货、数据分析、属性详情以及价格监控等。在采集这些数据时,尤其是面对海量数据时,需要采取有效的方法和技术来确保数据的准确性和完整性。以下是一些关于淘宝详情数据采集的建议:
请求示…