在自动驾驶与移动机器人路径规划时,必定会用到经典的算法A star。下面是我未加入与加入Tie Breaker 的matlab实现效果。可以发现加入Tie Breaker之后效果明显改善。
目录
一、效果比较
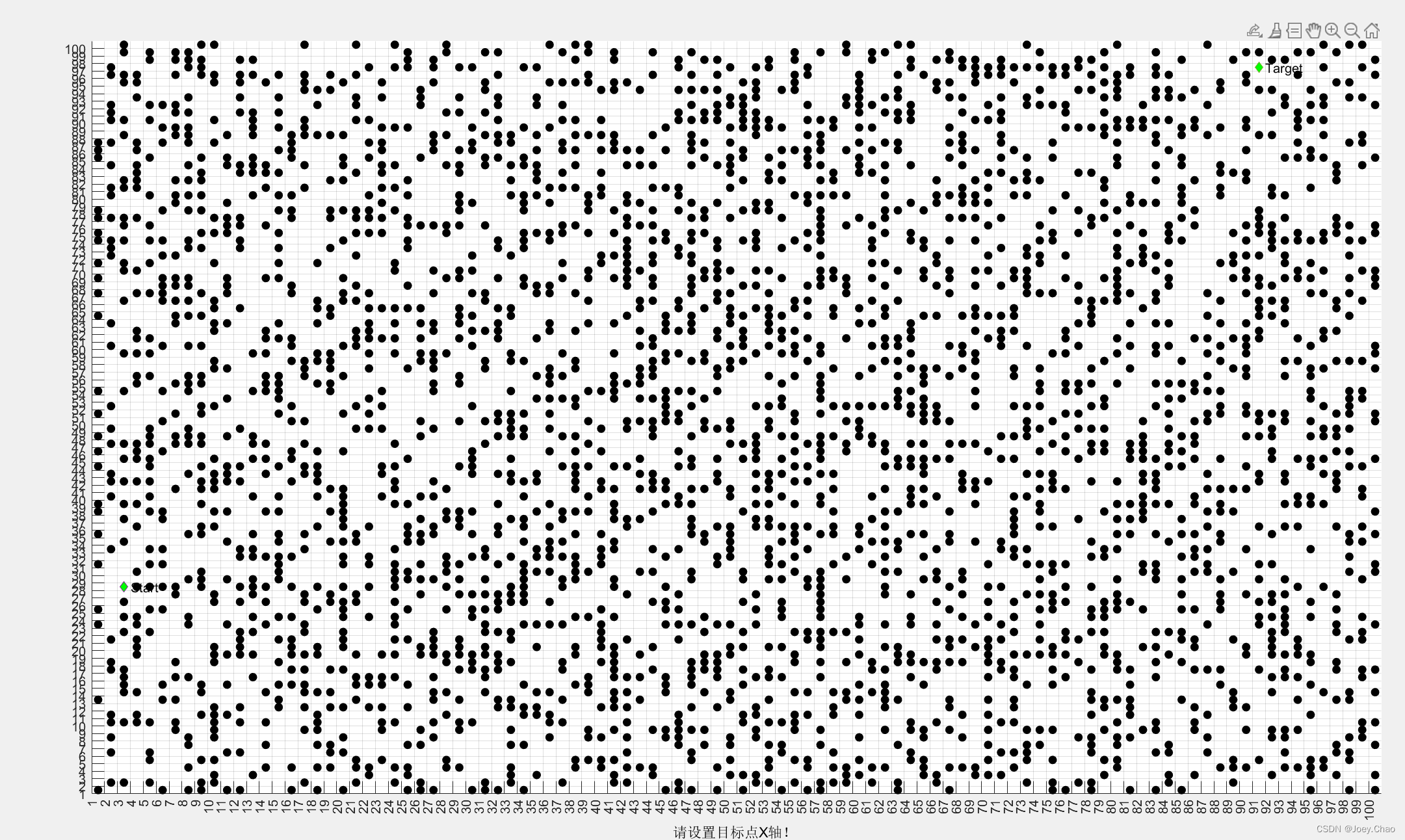
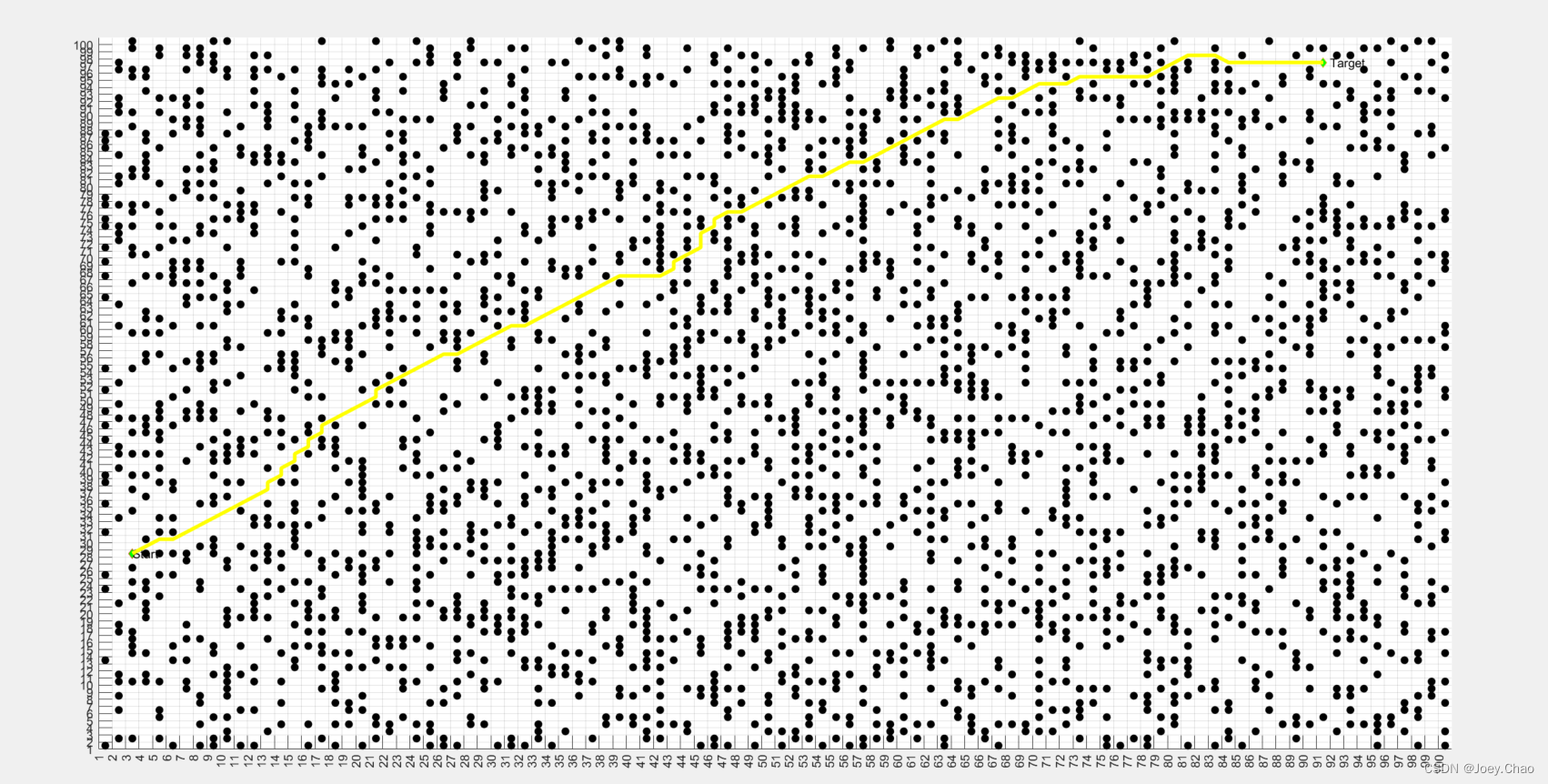
1.未加入Tie Breaker(黑色为障碍物,菱形绿色为目标点与起始点,红色为close,绿色为open,黄色为最终路径)
2.加入Tie Breaker(黑色为障碍物,菱形绿色为目标点与起始点,红色为close,绿色为open,黄色为最终路径)
二、A star算法
1.算法背景与原理
2.算法流程
3.算法应用与优化
4.算法特点与局限性
5.总结与展望
6.A star的Tie Breaker
三、核心代码
1.Main代码
2.A star算法
3.地图创建
一、效果比较
1.未加入Tie Breaker(黑色为障碍物,菱形绿色为目标点与起始点,红色为close,绿色为open,黄色为最终路径)
代码链接:
移动机器人自主路径规划之Astar算法MATLAB实现代码资源-CSDN文库
(1)原始地图信息。
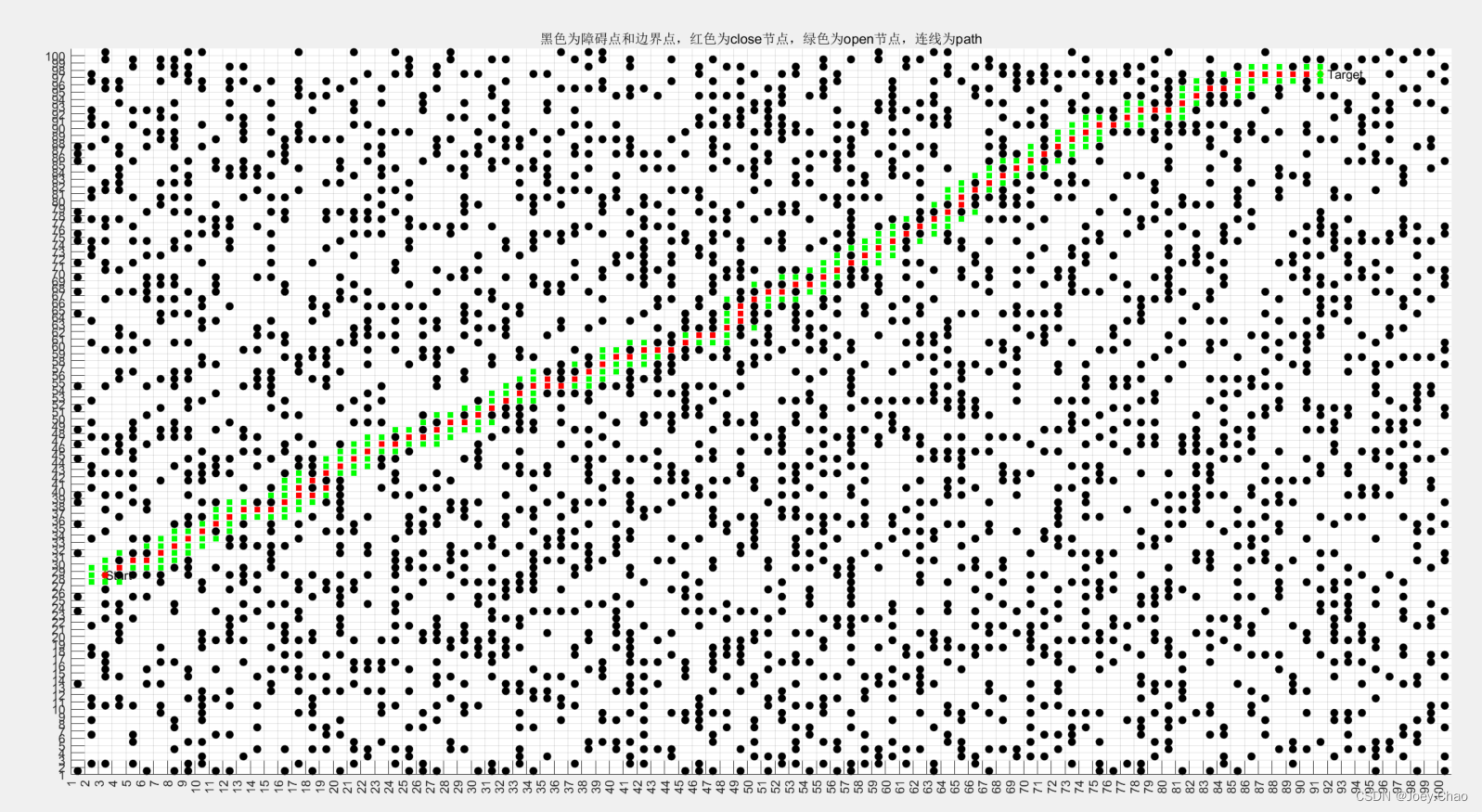
(2)规划地图信息

(3)路径信息
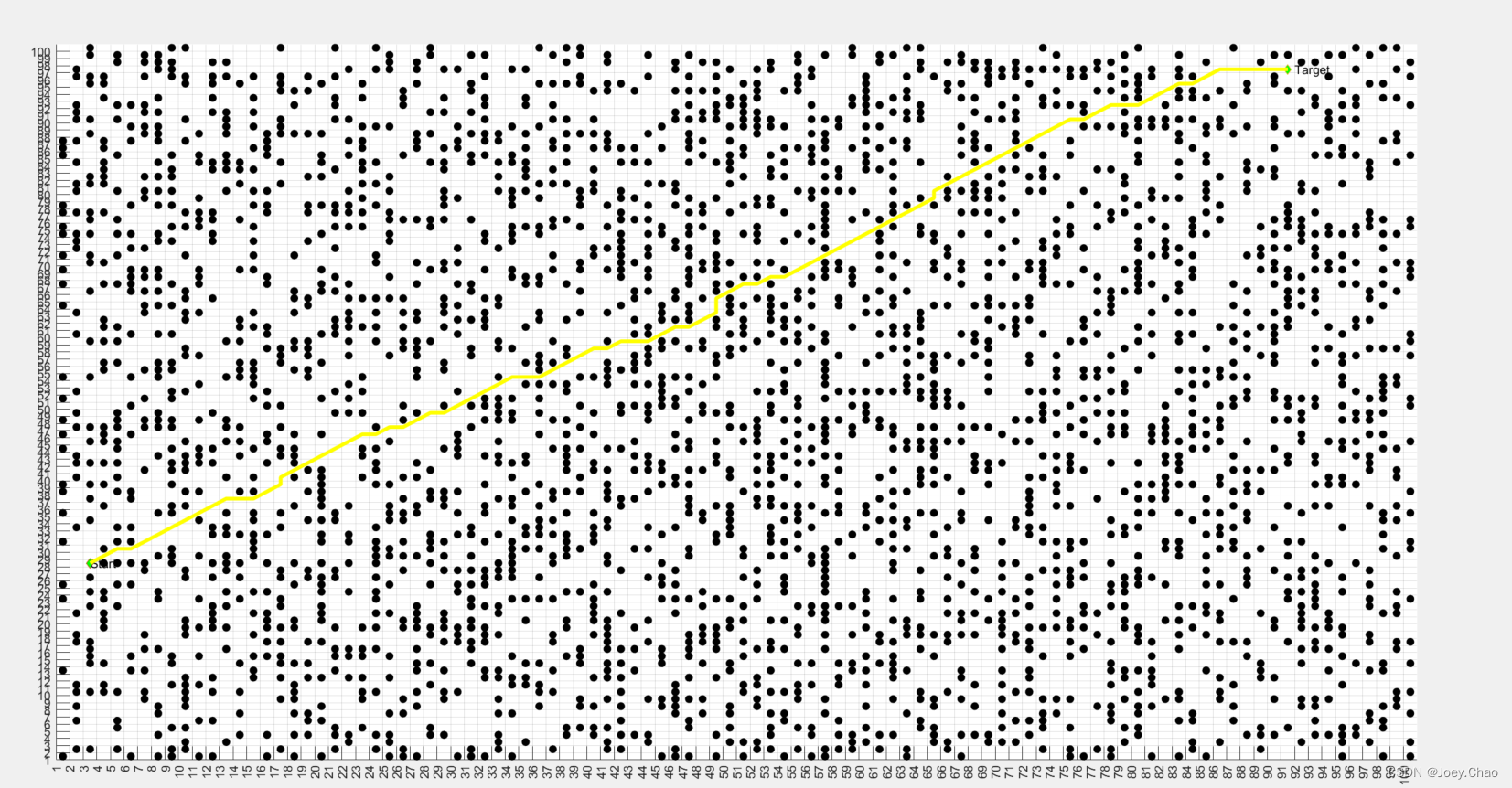
2.加入Tie Breaker(黑色为障碍物,菱形绿色为目标点与起始点,红色为close,绿色为open,黄色为最终路径)
𝑑𝑥1 = 𝑎𝑏𝑠 𝑛𝑜𝑑𝑒. 𝑥 − 𝑔𝑜𝑎𝑙. 𝑥
𝑑𝑦1 = 𝑎𝑏𝑠(𝑛𝑜𝑑𝑒. 𝑦 − 𝑔𝑜𝑎𝑙. 𝑦)
𝑑𝑥2 = 𝑎𝑏𝑠 𝑠𝑡𝑎𝑟𝑡. 𝑥 − 𝑔𝑜𝑎𝑙. 𝑥
𝑑𝑦2 = 𝑎𝑏𝑠 𝑠𝑡𝑎𝑟𝑡. 𝑦 − 𝑔𝑜𝑎𝑙. 𝑦
𝑐𝑟𝑜𝑠𝑠 = 𝑎𝑏𝑠(𝑑𝑥1 × 𝑑𝑦2 − 𝑑𝑥2 × 𝑑𝑦1)
h = ℎ + 𝑐𝑟𝑜𝑠𝑠 × 0.001代码链接:
无人驾驶(移动机器人)路径规划之Astar(TieBreaker)算法及其matlab实现资源-CSDN文库
(1)原始地图信息。
(2)规划地图信息
(3)路径信息
二、A star算法
Astar算法是一种广泛使用的路径规划算法,它通过启发式搜索的方式,在图形或网络中寻找两个节点之间的最短路径。A算法结合了广度优先搜索和最佳优先搜索的特点,通过评估每个可能的路径,以找到从起点到目标节点的最佳路径。以下是对A*算法的详细介绍。
1.算法背景与原理
A*算法最早于1964年在IEEE Transactions on Systems Science and Cybernetics中的论文《A Formal Basis for the Heuristic Determination of Minimum Cost Paths》中首次提出。它属于经典的启发式搜索方法,其核心思想在于当前搜索结点往下选择下一步结点时,可以通过一个启发函数来进行选择,选择代价最少的结点作为下一步搜索结点而跳转其上。
在Astar算法中,每个节点都有两个关键值:G值和H值。G值表示从起点到当前节点的实际代价,即已经走过的路径长度;H值表示从当前节点到目标节点的估计代价,即预计还需要走多远才能达到目标。Astar算法在搜索过程中,始终选择F值最小的节点进行扩展,其中F=G+H。这种策略使得A*算法能够尽可能地沿着最短路径进行搜索,从而提高搜索效率。
2.算法流程
A*算法的流程大致如下:
- 初始化:创建一个开放列表和一个关闭列表,用于存储待探索和已探索的节点。将起点加入开放列表。
- 选择节点:从开放列表中选择F值最小的节点作为当前节点。如果开放列表为空,则算法结束,表示没有找到路径。
- 扩展节点:将当前节点从开放列表移到关闭列表,并检查其所有邻居节点。对于每个邻居节点,如果它已经在关闭列表中,则忽略它;如果它不在开放列表和关闭列表中,则计算其G值、H值和F值,并将其添加到开放列表;如果它已经在开放列表中,但新计算的G值更小,则更新其G值和F值。
- 重复搜索:重复步骤2和3,直到目标节点被加入关闭列表或开放列表为空。如果目标节点被加入关闭列表,则算法找到了一条从起点到目标节点的路径;如果开放列表为空,则算法结束,表示没有找到路径。
3.算法应用与优化
Astar算法在游戏开发、机器人学和其他相关领域有着广泛的应用。在游戏中,Astar算法被用来实现人物的寻路功能,使得角色能够智能地找到从起点到终点的最短路径。在机器人学中,A*算法被用于机器人的路径规划,帮助机器人避开障碍物并高效地到达目的地。
为了提高A*算法的性能和效率,研究者们进行了大量的优化工作。例如,通过改进数据结构(如使用优先队列来存储开放列表中的节点),可以减少算法的时间复杂度;通过引入预处理技术(如构建网格地图或生成路标图),可以进一步提高算法的搜索速度;通过引入动态障碍物处理和实时地图更新机制,可以使算法更好地适应复杂和动态的环境。
4.算法特点与局限性
Astar算法具有方向性、智能性等特点,能够结合搜索任务中的环境情况,缩小搜索范围,提高搜索效率。然而,Astar算法也存在一些局限性。首先,它依赖于启发式函数的选择,如果启发式函数设计不当,可能导致算法性能下降或无法找到最优解。其次,Astar算法在复杂的环境或图形中可能不是最优的,因为它需要对每个可能的路径进行评估和比较。此外,Astar算法的空间复杂度较高,需要存储大量的节点信息,这可能导致内存消耗较大。
5.总结与展望
Astar算法作为一种高效的路径规划算法,在多个领域得到了广泛应用。通过不断优化和改进算法的实现方式,可以进一步提高Astar算法的性能和效率,使其更好地适应复杂和动态的环境。未来,随着人工智能和机器人技术的不断发展,A*算法有望在更多领域发挥重要作用,为智能系统的路径规划和决策提供支持。
请注意,以上是对A star算法的简要介绍,实际应用中可能还需要考虑更多的细节和特殊情况。此外,由于篇幅限制,这里无法对Astar算法的每个方面都进行深入的探讨。如果需要更详细或专业的介绍,建议查阅相关学术论文或技术文档。
6.A star的Tie Breaker
A star算法中的Tie Breaker(平局决胜者)是一个解决在搜索过程中遇到多个具有相同F值的节点时,如何选择下一个扩展节点的问题的机制。在A star算法中,当开放列表中存在多个具有相同最小F值的节点时,如果没有明确的选择标准,算法可能会陷入非确定性的行为,导致每次运行的结果不一致或者搜索性能下降。
Tie Breaker的作用就是提供一个确定性的选择标准,确保在面临多个相同F值的节点时,算法能够一致地选择下一个扩展节点。这样可以提高算法的稳定性和可预测性。
Tie Breaker的具体实现方式可以有多种。一种常见的做法是按照节点的其他属性进行排序,比如按照节点的G值或者H值进行次级排序。如果G值和H值也相同,还可以考虑使用节点的位置、编号或者其他自定义的属性进行排序。这样,当遇到多个具有相同F值的节点时,算法会根据Tie Breaker的规则选择一个确定的节点进行扩展。
另外,有些实现中还可能采用随机选择的方式来处理平局情况,但这通常不是首选方法,因为它可能导致算法的不稳定性和不可预测性。
总之,Tie Breaker是A算法中一个重要的机制,用于解决在选择扩展节点时遇到的平局情况,确保算法的一致性和稳定性。通过合理地设计Tie Breaker的规则,可以提高A算法的性能和可靠性。
三、核心代码
1.Main代码
function Main()
%主程序
clc
clear all
close all;
disp('A Star Path Planing start!!');
[map,node,obstacle]=createmap();
map_start = node(1:2);
map_goal = node(3:4);
xmax = size(map,1);
ymax = size(map,2);
figure;
pause(3);
axis([1 xmax+1 1 ymax+1])
set(gca,'YTick',0:1:xmax);
set(gca,'XTick',0:1:ymax);
grid on;
hold on;
% 绘制边界和障碍点
plot(obstacle(:,1)+.5,obstacle(:,2)+.5,'o', 'MarkerFaceColor', 'k', 'MarkerEdgeColor', 'k');
hold on;
% 绘制起始点
plot(map_start(1)+.5,map_start(2)+.5,'d','MarkerFaceColor','g');
hold on;
text(map_start(1)+.5,map_start(2)+.5,'Start');
hold on;
% 绘制终止点
plot(map_goal(1)+.5,map_goal(2)+.5,'d','MarkerFaceColor','g');
hold on;
text(map_goal(1)+1,map_goal(2)+.5,'Target');hold on;
path = FAstar(obstacle,map,map_start,map_goal);% A*算法
%画出路径
figure;
axis([1 xmax+1 1 ymax+1])
set(gca,'YTick',0:1:xmax);
set(gca,'XTick',0:1:ymax);
grid on;
hold on;
% 绘制边界和障碍点
plot(obstacle(:,1)+.5,obstacle(:,2)+.5,'o', 'MarkerFaceColor', 'k', 'MarkerEdgeColor', 'k');
hold on;
% 绘制起始点
plot(map_start(1)+.5,map_start(2)+.5,'d','MarkerFaceColor','g');
hold on;
text(map_start(1)+.5,map_start(2)+.5,'Start');
% 绘制终止点
plot(map_goal(1)+.5,map_goal(2)+.5,'d','MarkerFaceColor','g');
hold on;
text(map_goal(1)+1,map_goal(2)+.5,'Target');
if length(path)>=1
plot(path(:,1)+0.5,path(:,2)+0.5,'-y','LineWidth',3);
hold on;
end
%}
grid on;
hold on;
pause(5);
%close(figure(1));
end2.A star算法
function path = FAstar(obstacle,map,map_start,map_goal)
%Tie Breaker
dx0 = abs(map_goal(1)-map_start(1));
dy0 = abs(map_goal(2)-map_start(2));
% A*程序算法
path = [] ;
%openlist
open = [];
%closelist
close = [];
%findflag用于判断while循环是否结束
findflag = false;
%1.起始点放在openlist中
open = [map_start(1),map_start(2),0+h(map_start,map_goal),0,map_start(1),map_start(2)];%节点坐标、代价值F,G,父节点
%更新八节点
next = model();
while ~findflag
%首先判断是否到达目标点
if isempty(open(:,1))
disp('No path to goal!');
return;
end
%判断目标点是否在open中
[openflag,id] = Isopen(map_goal,open);
if openflag
disp('Find goal!');
close = [open(id,:);close];%close的第一行
findflag = true;
break;
end
%判断openlist中F排序
%寻找F最小点
[Y,I] = sort(open(:,3));
open =open(I,:);
%F值排序后的open
%将F最小的节点(open中第一行节点)放到close
close = [open(1,:);close];
current = open(1,:);
open(1,:) = [];%open第一行置为空
%对当前节点周围4个相邻节点进行判断
for in = 1:length(next(:,1))
%获得相邻节点的坐标,F置为0,G置为0
%父坐标暂定为0
m = [current(1,1)+next(in,1) , current(1,2)+next(in,2),0,0,0,0];
m(4) = current(1,4) + next(in,3);%相邻节点G
m(3) = m(4) + h1(m(1:2),map_goal,dx0,dy0);%相邻节点F
%判断当前节点是否为阻碍点
if Isobstacle(m,obstacle)
continue;
end
%{
如果相邻节点,在closelist中,则flag=1 targetInd=其close的行数
如果相邻节点,不在openlist中,则flag=2 targetInd=[]
如果相邻节点,在openlist中,则flag=3 targetInd=其open的行数
%}
[flag,targetInd] = Findlist(m,open,close);
%如果它在Closelist中,忽略此相邻节点
if flag==1
continue;
%如果它不在Openlist中,加入Openlist,并把当前节点设置为它的父节点
elseif flag==2
m(5:6) = [current(1,1),current(1,2)];
open = [open;m];
%剩下的情况就是它在Openlist中,检查由当前节点到相邻节点是否更好
% 如果更好则将当前节点设置为其父节点,并更新F,G值;否则不操作
else
%由当前节点到达相邻节点更好(targetInd是此相邻节点在open中的行号 此行的第3列是代价函数F值)
if m(3) < open(targetInd,3)
m(5:6) = [current(1,1),current(1,2)];
open(targetInd,:) = m; %更好,则将此相邻节点的父节点设置为当前节点,否则不作处理
end
end
end
plotmap(map,open,close);
end
%追溯路径
path = getpath(close,map_start);
end3.地图创建
function [map,node,obstacle] = createmap()
%创建地图
clear all;
figure;%创建新窗口
%地图参数初始化
max_x = 100;%长
max_y = 100;%宽
p_obstacle = 0.3;%阻碍率
%设置阻碍点
obstacle0 = ones( max_x ,max_y ) * p_obstacle;%创建矩阵
%MAP中阻碍点设为-1,非阻碍点设为9998
map = 9999*((rand(max_x,max_y))>obstacle0) - 1;%-1代表阻碍物
YMAX = size(map,2);%y轴最大
XMAX = size(map,1);%x轴最大
obstacle = [];
for i1 = 0 : (YMAX+1)
obstacle = [obstacle;[0 i1]];
end
for i2 = 0 : (XMAX+1)
obstacle = [obstacle;[i2 0]];
end
for i3 = 0 : (YMAX+1)
obstacle = [obstacle;[XMAX+1 i3]];
end
for i4 = 0 : (XMAX+1)
obstacle = [obstacle;[i4 YMAX+1]];
end
%障碍点坐标
for i = 1 : XMAX
for j = 1 : YMAX
if map(i,j) == -1
obstacle = [obstacle;[i j]];
end
end
end
axis([1 max_x + 1 1 max_y + 1])%x,y轴1-50图像
set(gca,'XTick',0:1:max_x);%x轴的间隔为1
set(gca,'YTick',0:1:max_y);%y轴的间隔为1
grid on;%设置网格线
hold on;%保持图形
%绘制地图障碍物
for i = 1 : max_x
for j = 1 : max_y
if map(i,j) == -1
plot(i+0.5, j+0.5, 'o', 'MarkerFaceColor', 'k', 'MarkerEdgeColor', 'k'); %中心位置绘制点
end
end
end
pause(1);%延时一秒
%初始点
h=msgbox('初始位置标记!');%弹出初始框提示标记初始位置
uiwait(h,3);%3s后关闭对话框
if ishandle(h) == 1%删除对话框
delete(h);
end
xlabel('请设置初始点X轴! ','Color','black');%设置x轴
but = 0;
while(but ~= 1)%收到左键点击
[xval,yval,but] = ginput(1);
xval=floor(xval);
yval=floor(yval);
end
xstart = xval;%初始位置
ystart = yval;
map(xval,yval) = 0;
plot(xval + 0.5,yval + 0.5,'d','MarkerFaceColor','g');%绘制初始点
text(xval + 1,yval + 0.5,'Start');
pause(1);%延时一秒
%目标点
h=msgbox('目标位置标记!');%弹出目标提示标记目标位置
uiwait(h,3);%3s后关闭对话框
if ishandle(h) == 1%删除对话框
delete(h);
end
xlabel('请设置目标点X轴! ','Color','black');%设置x轴
but1 = 0;
while(but1 ~= 1)%收到左键点击
[xval,yval,but1] = ginput(1);
xval=floor(xval);
yval=floor(yval);
end
xTarget = xval;%目标位置
yTarget = yval;
map(xval,yval) = 9998;
plot(xval + 0.5,yval + 0.5,'d','MarkerFaceColor','g');%绘制目标点
text(xval + 1,yval + 0.5,'Target');
node = [xstart,ystart,xTarget,yTarget];
h=msgbox('请确认地图信息!');%确认地图信息
uiwait(h,3);%3s后关闭对话框
if ishandle(h) == 1%删除对话框
delete(h);
end
pause(5);