路由选择算法
路由协议
路由协议的目标:确定从发送主机到接收主机之间,通过路由器的网络“较好”的路径(等价于路由器的序列)
- 路径:路由器的序列,分组将会沿着该序列从源主机到达最后的目标主机
- “较好”:最小“代价”,“最快的”,“最不拥塞”
- 路由:一个“top-10”网络挑战
路由的概念
- 路由:按照某种指标(传输延迟,所经过的站点数目等)找到一条从源节点到目标节点的较好路径
- 较好路径:按照某种指标较小的路径
- 指标:站数、延迟、费用,队列长度等,或者是一些单纯指标的加权平均
- 采用什么样的指标,表示网络使用者希望网络在什么方面表现突出,什么指标网络使用者比较重视
- 路由器 - 路由器之间的最优路径 = 主机对之间的最优路径
- 路由器连接子网,子网到路由器之间的跳数就一跳,必须要走
- 路由器到下一跳路由器(节点到节点)之间的最优路径找到了
- 也就找到了从源子网向目标子网所有主机对之间的最优路径
- 大大降低了路由计算的规模
- 在路由计算中按照子网到子网的路径计算为目标,而不是主机到主机
- 路由选择算法:网络层软件的一部分,完成路由功能
网络的图抽象
图抽象

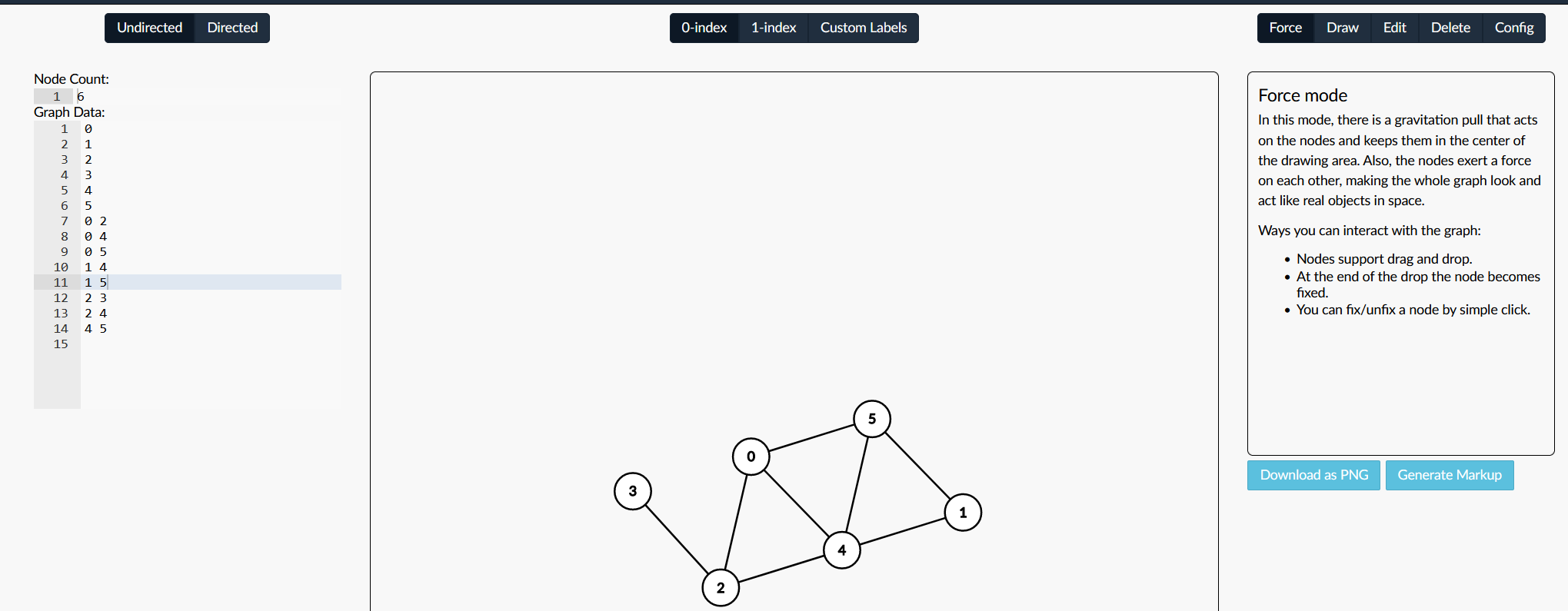
图:G = (N,E)
N = 路由集合器 = (u,v,w,x,y,z)
E = 链路集合 = ((u,v),(u,x),(v,x),(v,w),(x,w),(x,y),(w,y),(w,z),(y,z)) 边有代价
边和路径的代价
- c(x,x’) = 链路的代价(x,x’)
- 代价可能总为1
- 或是链路带宽的倒数
- 或是拥塞情况的倒数
- cost of path( x 1 , x 2 , x 3 , . . . , x p x_1,x_2,x_3,...,x_p x1,x2,x3,...,xp) = c( x 1 , x 2 x_1,x_2 x1,x2) + c( x 2 , x 3 x_2,x_3 x2,x3) + … + c( x p − 1 , x p x_{p-1},x_p xp−1,xp)
最优化原则
汇集树
- 此节点到所有其他节点的最优路径形成的树
- 路由选择算法就是为所有路由器找到并使用汇集树

路由的原则
路由选择算法的原则
- 正确性:算法必须是正确的和完整的,使分组一站一站接力,正确发向目标站;完整:目标所有的站地址,在路由表中都能找到相应的表项;没有处理不了的目标站地址
- 简单性:算法在计算机上应简单:最优但复杂的算法,时间上延迟很大,不实用,不应为了获取路由信息增加很多的通信量
- 健壮性:算法应能适应通信量和网络拓扑的变化:通信量变化,网络拓扑的变化算法能很快适应;不向很拥挤的链路发送数据,不向断了的链路发送数据
- 稳定性:产生的路由不应该摇摆
- 公平性:对每一个站点都公平
- 最优性:某一个指标的最优,时间上,费用上等指标,或综合指标;实际上,获取最优的结果代价较高,可能是次优的
路由算法分类
全局或局部路由信息
全局:
- 所有的路由器拥有完整的拓扑和边的代价的信息
- "link state"算法
分布式:
- 路由器只知道与它有物理连接关系的邻居路由器,和到相应邻居路由器的代价值
- 迭代地与邻居交换路由信息,计算路由信息
- "**distance vector"算法
静态或动态
静态:
- 路由随时间变化缓慢
动态:
- 路由变化很快
- 周期性更新
- 根据链路代价的变化而变化
链路静态路由(LS)
LS路由的工作过程
配置LS路由选择算法的路由工作过程
- 各点通过各种渠道获得整个网络拓扑,网络中所有链路代价等信息(这部分和算法没关系,属于协议和实现)
- 使用LS路由算法,计算本站点到其他站点的最优路径(汇集树),得到路由表
- 按照此路由表转发分组(datagram方式)
- 严格意义上说不是路由的一个步骤
- 分发到输入端口的网络层
LS路由的基本工作过程
- 发现相邻节点,获知对方网络地址
- 测量到相邻节点的代价(延迟、开销)
- 组装一个LS分组,描述它到相邻节点的代价情况
- 将分组通过扩散的方式发到所有其他路由器
- 以上四步让每个路由器获得拓扑和边代价
- 通过Dijkstra算法找出最短路径(这才是路由算法)
- 每个节点独立算出来到其他节点(路由器 = 网络)的最短路径
- 迭代算法:第k步能够知道本节点到k个其他节点的最短路径
链路状态路由选择
- 发现相邻节点,获知对方网络地址
- 一个路由器上电之后,向所有线路发送Hello分组
- 其他路由器接收到Hello分组,回送应答,在应答分组中,告知自己的名字(全局唯一)
- 在LAN中,通过广播Hello分组,获得其他路由器的信息,可以认为引入一个人工节点

- 测量到相邻节点的代价(延迟、开销)
- 实测法,发送一个分组要求对方立即响应
- 回送一个ECHO分组
- 通过测量时间可以估算出延迟情况
- 组装一个分组,描述相邻节点的情况
- 发送者名称
- 序号,名称
- 列表:给出他相邻节点,和它到相邻节点的延迟

- 将分组通过扩散的方法发送到所有其他路由器
- 序列号:用于控制无穷的扩散,每个路由器都记录(源路由号,顺序号),发现重复的或老的就不扩散
- 具体问题1:循环使用问题
- 具体问题2:路由器崩溃之后序号从0开始
- 具体问题3:序号出现错误
- 解决问题的方法:年龄字段
- 生成一个分组时,年龄字段不为0
- 每一个时间段,AGE字段减一
- AGE字段为0的分组将被抛弃
- 关于扩散分组的数据结构
- Source:从哪个节点收到LS分组
- Seq,Age:序号,年龄
- Send flags:发送标记,必须向指定的哪些相邻站点转发LS分组
- ACK flags:本站点必须向哪些相邻站点发送应答
- DATA:来自source站点的LS分组
- 节点B的数据结构
- 序列号:用于控制无穷的扩散,每个路由器都记录(源路由号,顺序号),发现重复的或老的就不扩散
| Source | Seq | Age | Send flags A | Send flags C | Send flags F | ACK flags A | ACK flags C | ACK flags F | Data |
|---|---|---|---|---|---|---|---|---|---|
| A(相邻) | 21 | 60(初始TTL) | 0 | 1 | 1 | 1(A与B相邻,直接获取A的分组,给A ACK) | 0 | 0 | |
| F(相邻) | 21 | 60 | 1 | 1 | 0 | 0 | 0 | 1 | |
| E(通过A、F获取) | 21 | 59(一次hop) | 0 | 1 | 0 | 1(E通过A获取,给A ACK) | 0 | 1 | |
| C(相邻) | 20 | 60 | 1 | 0 | 1 | 0 | 1 | 0 | |
| D(通过C、F获取) | 21 | 59 | 1 | 0 | 0 | 0 | 1 | 1 |
- 通过Dijkstra算法找出最短路径
- 路由器获得各站点LS分组和整个网络的拓扑
- 通过Dijkstra算法计算出到其他服务器的最短路径(汇集树)
- 将计算结果安装到路由表中
LS的应用情况
- OSPF协议是一种LS协议,被用于Internet上
- IS-IS(intermediate system - intermediate system):被用于Internet主干中,Netware
Dijkstra算法
符号标记
- c(i,j):从节点i到j链路代价(初始状态下非相邻节点之间的链路代价为∞)
- D(v):从源节点到节点V的当前路径代价(节点的代价)
- p(v):从源到节点V的路径前序节点
- N’:当前已经知道最优路径的节点集合(永久节点的集合)

LS路由选择算法的工作原理
节点标记:每一个节点使用(D(v),p(v))标记
- D(v)从源节点由已知最优路径到达本节点的距离
- P(v)前序节点来标注
2类节点
- 临时节点:还没有找到从源节点到此节点的最优路径的节点
- 永久节点 N’:已经找到了从源节点到此节点的最优路径的节点
算法具体流程
- 初始化
- 除了源节点外,所有节点都为临时节点
- 节点代价除了与源节点代价相邻的节点外,都为∞
- 从所有临时节点中找到一个节点代价最小的临时节点,将之变为永久节点(当前结点)W
- 对此节点的所有在临时节点集合中的邻节点(V)
- 如 D(v)>D(w) + c(w,v), 则重新标注此点, (D(W)+C(W,V), W)
- 否则,不重新标注
- 开始一个新的循环
例子

Dijkstra例子


Dijkstra算法的讨论
算法复杂度: n节点
- 每一次迭代: 需要检查所有不在永久集合N中节点
- n(n+1)/2 次比较: O(n2 )
- 有很有效的实现: O(nlogn)
可能会出现震荡问题:
- 例如:链路代价 = 链路承载的流量
- 路径改变次数过多

距离矢量路由选择
基本思想
- 各路由器维护一张路由表,结构如图
| To(目标) | Next(到达目标的代价最小的路径中,下一跳) | cost(到目标的代价) |
|---|---|---|
| A | Z | 14 |
| … | … | … |
- 各路由器与相邻路由器交换路由表(待续)
- 根据获得的路由信息,更新路由表(待续)

- 代价及相邻节点间代价的获得
- 跳数(hops), 延迟(delay),队列长度
- 相邻节点间代价的获得:通过实测
- 路由信息的更新
- 根据实测 得到本节点A到相邻站点的代价(如:延迟)
- 根据各相邻站点声称它们到目标站点B的代价,计算出本站点A经过各相邻站点到目标站点B的代价
- 找到一个最小的代价,和相应的下一个节点Z,到达节点B经过此节点Z,并且代价为A-Z-B的代价
- 其它所有的目标节点同样的计算方法

例子1
- 以当前节点J为例,相邻节点 A,I,H,K
- J测得到A,I,H,K的延迟为 8ms,10ms,12ms,6ms
- 通过交换DV, 从A,I,H,K获得到 它们到G的延迟为 18ms,31ms,6ms,31ms
- 因此从J经过A,I,H,K到G的延迟 为26ms(8 + 18),41ms(10 + 31),18ms(12 + 6), 37ms(31 + 6)
- 将到G的路由表项更新为18ms, 下一跳为:H(18ms对应的节点)
- 其它目标一样,除了本节点J

DV的无穷计算问题
- DV的特点
- 好消息传的快,坏消息传的慢
- 好消息的传播以每一个交换周期前进一个路由器的速度进行
- 好消息:某个路由器接入或有更短的路径
- 举例
- 坏消息的传播速度非常慢(无穷计算问题)

- 例子:
- AB之间断开了
- 第一次交换之后, B从C处获得信息,C可以到达A(C-A, 要经过B本身),但是路径是2,因此B变成3,从C处走
- 第二次交换,C从B处获得消息, B可以到达A,路径为3, 因此,C到A从B走,代价为3(因为每次改变都会向周围传递Dv )
- 无限此之后, 到A的距离变成INF,不可达

Bellman-Ford 方程(动态规划)
设 dx(y) := 从x到y的最小路径代价,那么 dx(y) = min {c(x,v) + dv(y) }
其中:v是x的邻居
例子

明显的,
d
v
(
z
)
=
5
,
d
x
(
z
)
=
3
,
d
w
(
z
)
=
3
d_v(z) = 5, d_x(z) = 3, d_w(z) = 3
dv(z)=5,dx(z)=3,dw(z)=3
由于B-F方程得到:
d
u
(
z
)
=
m
i
n
{
c
(
u
,
v
)
+
d
v
(
z
)
,
c
(
u
,
x
)
+
d
x
(
z
)
,
c
(
u
,
w
)
+
d
w
(
z
)
}
=
m
i
n
{
2
+
5
,
1
+
3
,
5
+
3
}
=
4
d_u(z) = min \{ c(u,v) + d_v(z), c(u,x) + d_x(z), c(u,w) + d_w(z) \} = min \{2 + 5, 1 + 3, 5 + 3\} = 4
du(z)=min{c(u,v)+dv(z),c(u,x)+dx(z),c(u,w)+dw(z)}=min{2+5,1+3,5+3}=4
那个能够达到目标z最小代价的节点x,就在到目标节点的下一条路径上, 在转发表中使用
思路
D x ( y ) D_x(y) Dx(y) = 节点x到y代价最小值的估计
- x 节点维护距离矢量 D x = [ D x ( y ) : y ∈ N ] D_x = [D_x (y): y ∈ N ] Dx=[Dx(y):y∈N]
节点x:
- 知道到所有邻居v的代价: c(x,v)
- 收到并维护一个它邻居的距离矢量集
- 对于每个邻居, x 维护 D v = [ D v ( y ) : y є N ] D_v = [D_v (y): y є N] Dv=[Dv(y):yєN]
核心思路
- 每个节点都将自己的距离矢量估计值传送给邻居,定时或者DV有变化时,让对方去算
- 当x从邻居收到DV时,自己运算,更新它自己的距离矢量(采用B-F equation)
D x ( y ) ← m i n v { c ( x , v ) + D v ( y ) } D_x(y) ← min_v\{c(x,v) + D_v(y)\} Dx(y)←minv{c(x,v)+Dv(y)} 对于每个节点y ∈ N - X往y的代价x到邻居v代价v声称到y的代价
- Dx(y)估计值最终收敛于实际的最小代价值 d x ( y ) d_x(y) dx(y)
特点
异步式,迭代: 每次本地迭代被以下事件触发:
- 本地链路代价变化了
- 从邻居来了DV的更新消息
分布式:
- 每个节点只是在自己的DV改变之后向邻居通告
- 然后邻居们在有必要的时候通知他们的邻居

水平分裂(split horizon)算法
一种对无穷计算问题的解决办法 —— 结局坏消息传的慢的问题
- 当AB断开之后,C进行交换
- C知道要经过B才能到达A,所以C向B报告它到A的距离 为INF;C 告诉D它到A的真实距离2(就这样一边传递INF,一边传递真实举例2,水平方向分裂)
- 下一阶段,C发现到A的路径断开了,D进行交换
- D告诉E,它到A的距离,但D告诉C它通向A的距离为INF
- 第一次交换: B通过测试发现到A的路径为INF,而C也告 诉B到A的距离为INF,因此,B到A的距离为INF
- 第二次交换: C从B和D那里获知,到A的距离为INF,因此 将它到A的距离为INF
- ……坏消息以一次交换一个节点的速度传播


水平分裂算法问题
水平分裂的问题:在某些拓扑形式下会失败(存在环路)

- A,B到D的距离为2, C到D的距离为1
- 如果C-D路径失败
- C获知到D为INF,从A,B获知到D的距离为INF,因此C认为D不可达
- A从C获知D的距离为INF,但从B处获知它到D的距离为2,因此A到B的距离为3,从B走
- B也有类似的问题
- 经过无限次之后,A和B都知道到D的距离为INF






例子

LS和DV算法的比较
消息复杂度(DV胜出) O(NE)
收敛时间(LS胜出) O(NlogN)
健壮性(LS胜出) 节点之间影响较小
| 性能指标 | LS特点 | DV特点 | 比较结果 |
|---|---|---|---|
| 消息复杂度 | 有n 节点, E 条链路,发送报文O(nE)个;(局部的路由信息;全局传播) | 只和邻居交换信息(全局的路由信息,局部传播) | DV胜出 |
| 收敛时间 | O( n 2 n^2 n2) 算法;有可能震荡 | 收敛较慢;可能存在路由环路;count-to-infinity 问题 | LS胜出 |
| 健壮性(路由器故障会发生什么) | 节点会通告不正确的链路代价,每个节点只计算自己的路由表,错误信息影响较小,局部,路由较健壮 | 节点可能通告对全网所有节点的不正确路径代价,每一个节点的路由表可能被其它节点使用,错误可以扩散到全网 | LS胜出 |