最近3DGS的爆火,引发了一众对三维高斯表达场景的研究。这里的三维高斯是什么?本文用简答的描述和简单实验来呈现三维高斯的数学意义。本文没有公式推导,主打一个意会。
我们高中都学过高斯分布,即一个钟形曲线。它的特点是有一个中心,两边递减。在计算机领域上的优势是:用两个参数
(
μ
,
σ
)
(\mu, \sigma)
(μ,σ)可以表示一个分布。OK,我们继续推广到二维的情况,在CV领域常用一个trick是高斯模糊(即 Gaussian Blur),在关键点的周围模糊一个范围。
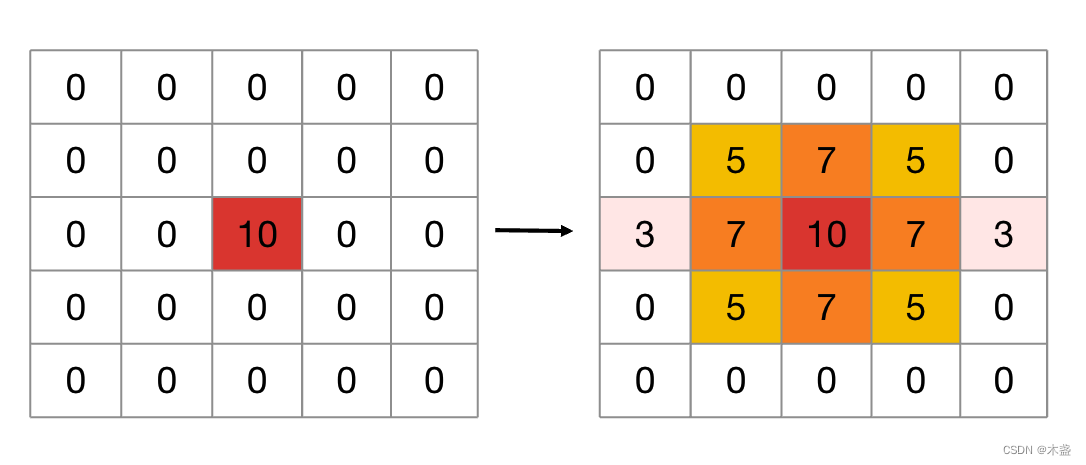
实际上,在关键点的周围模糊出一个范围,这个范围是服从高斯分布的,就像一个钟形曲线的俯视图。这个范围依旧可以用(中心点,协方差)等少数几个参数表示出来。至此,我们可以理解高斯表示的优点之一:用较少的参数可以表示一个任意大小的范围。这一优点特别适合用于场景表示。
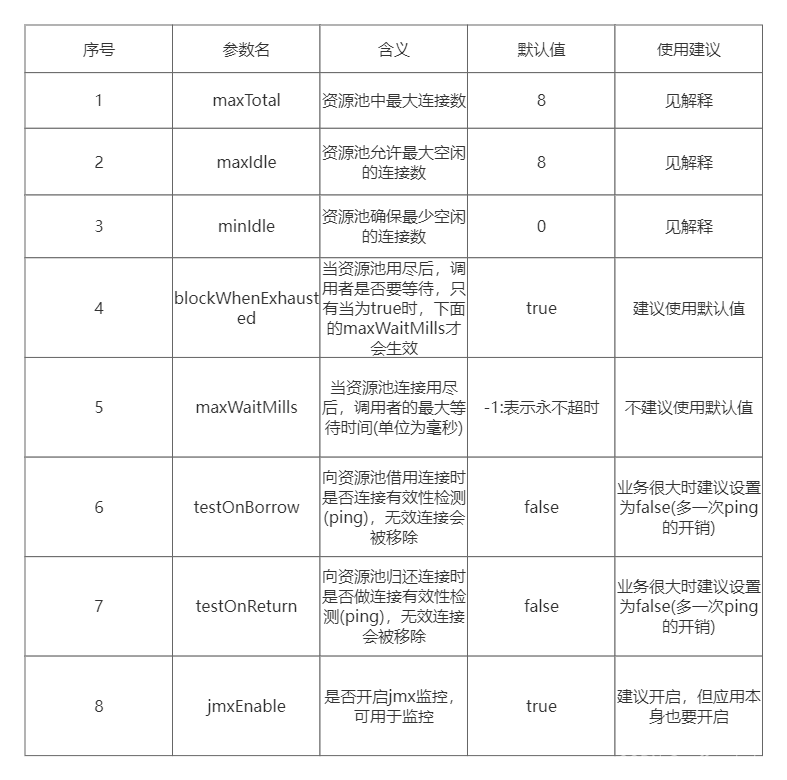
我们将高斯推广到三维——三维高斯。三维高斯在空间中是一个有中心的类椭球物体,3DGS就是用一堆高斯球来表示场景。以3DGS为例,每个三维高斯包含以下参数:
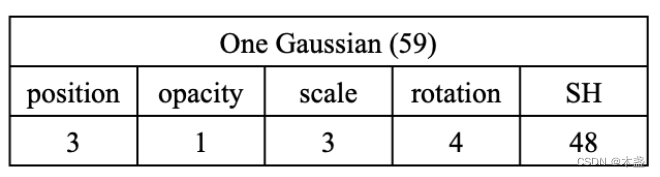
其中,position(x, y, z) 表示三维高斯的中心点,scale和rotation这7个参数表示高斯球的大小和旋转,opacity表示不透明度,SH表示球谐波系数用于进一步的颜色表示。所以,一个朴素三维高斯只需要有(position, scale, rotation)即可,opacity和SH都是3DGS作者为使其更好表达场景而增加的可训练参数。
我们做一个实验,随便初始化三个高斯球,对其(position, scale, rotation)分别设置,默认opacity为1。
xyz = np.array([[-0.7, 0.1, .03],
[-0.01451855, 0.4050243, -0.11472405],
[0.30140288, -0.20153112, 0.12868194]])
scales = torch.log(torch.Tensor([0.0428, 0.0836, 0.0711]))[..., None].repeat(1, 3).cuda()
rots = torch.Tensor([0.2, 0.1, 0.2, 0.5])[..., None].repeat(1, 3).cuda()
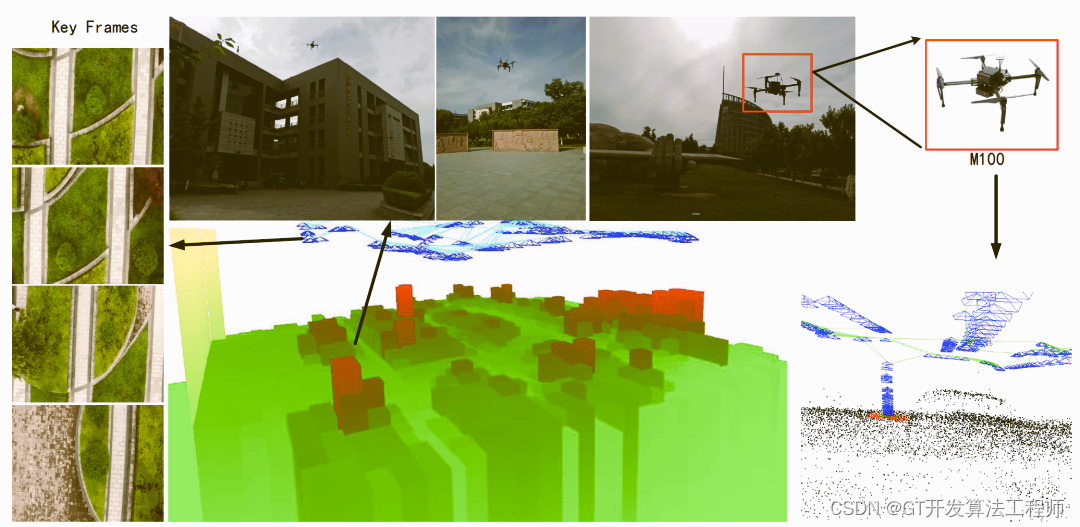
然后,选取一个合适的相机机位,将这三个高斯球投影到对应视角:
我们可以看到空间中有三个类椭球,这就是我们初始化的高斯球了。在3DGS的训练中,高斯球可以缩放、可以删减,也可以分裂增殖,最终完美重建出一个场景。
我们环绕一圈看一下这三个球的样子:

到这里,应该觉得三维高斯不抽象了吧。
有问题请留言交流~