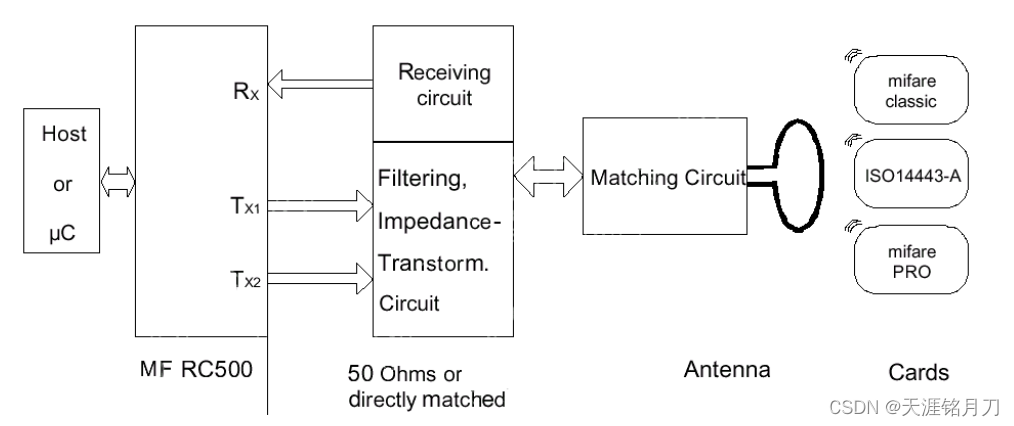
一、RC522刷卡电路组成
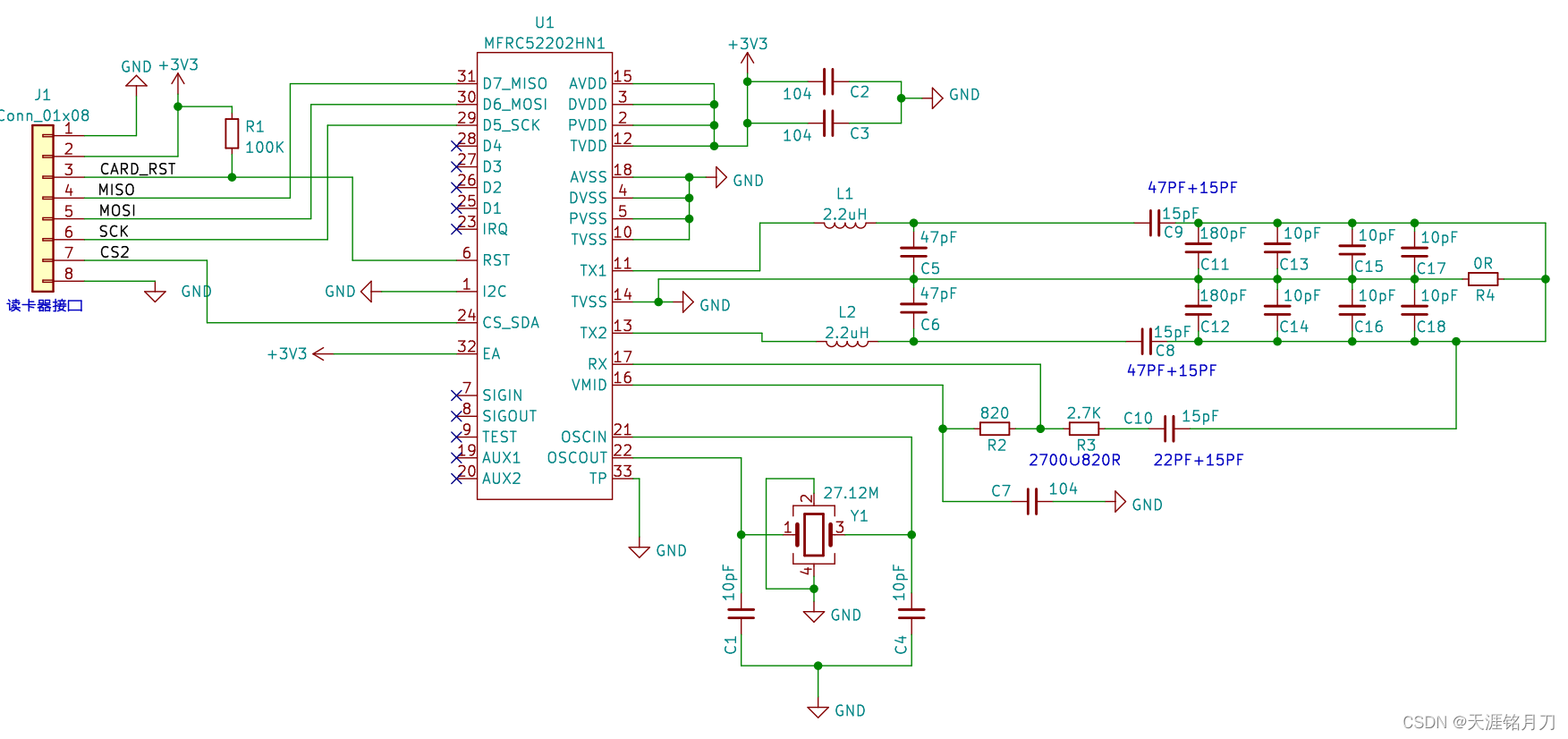
基于RC522的刷卡电路如上图所示。该电路组成主要分为三部分:
Receiving Circuit:接收电路,接收卡发送的数据。
Filtering Impedence-Transtorm circuit:滤波和阻抗变换电路,抑制高次谐波并优化到读卡器天线的功率传输。
Matching Circuit:天线匹配电路。
二、RC522天线电路参数设计
1、天线电路参数
MF RC500 是一个单独的读卡器集成电路,它在没有外部放大器的情况下工作距离最大可达到 10cm,两侧最大5cm。为了得到最大的刷卡距离,需要合理设计天线电路和接收电路的元件参数。
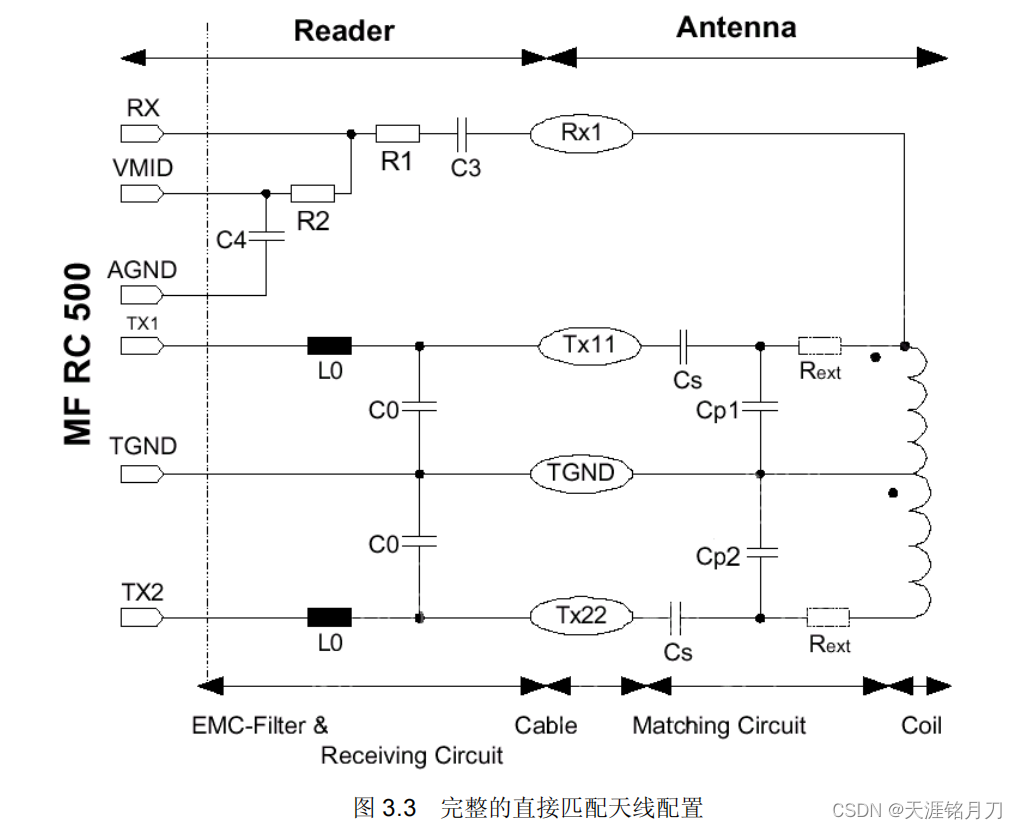
如上图所示为MF RC522推荐的天线电路和接收电路的结构。
其中L0、C0组成了LC滤波电路,对应图一中的L1、L2、C5、C6;
Cs、Cp对应图一中的C8、C9、C11、C12;
R1、R2、C3、C4对应图一中的R3、R2、R7、R10;
滤波和接收电路的元件L0、C0、Cs、Cp、R1、R2、R3、R4的参数是固定的。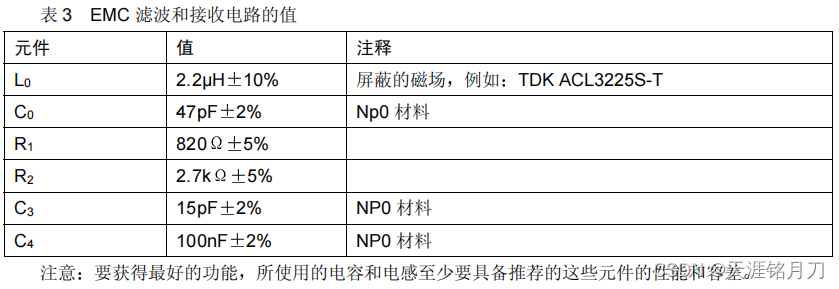
Tx11和Tx12之间的整个天线线圈电感用Lant表示、天线所有电阻损耗可以用 Rant 来表示、天线的电容损耗可以用Cant来表示。建议用阻抗分析仪测量天线的等效电路,
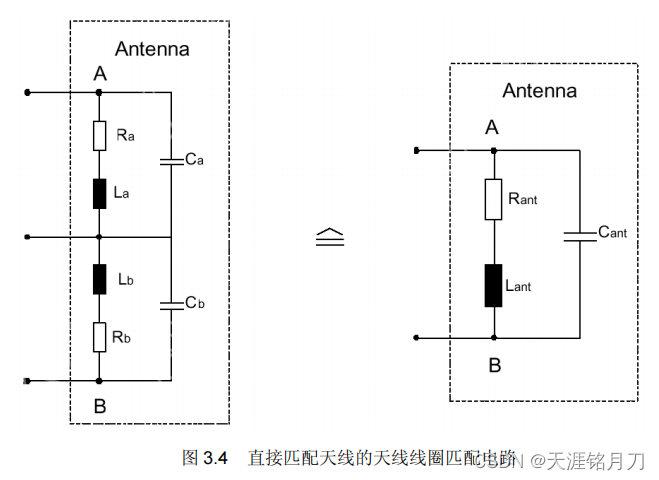
如果没有阻抗分析仪 将计算的电感和电容值作为起始值。
天线线圈等效电阻的估算:RANT=5*RDC
式中,RDC为天线线圈的导线电阻,RANT为考虑集肤效应的天线线圈等效电阻。
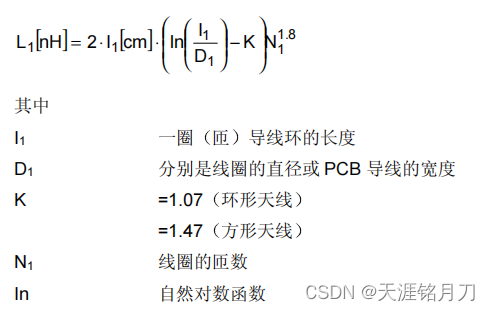
天线线圈电感的估算:
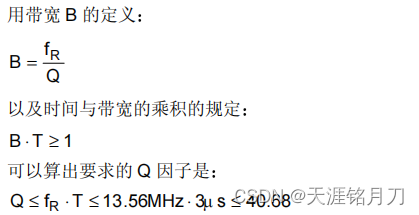
2、天线品质因子计算
获取了天线电感 LANT 和电阻 RANT 的值之后,计算天线的品质因子。

2、天线外部电阻计算
由于元件的容差和对温度的依靠 我们建议 Q 因子的值取 35 要降低原始的 Q 因子 要求增加一个外部电阻 REXT 。图 3.10 显示了如何连接外部电阻 REXT。
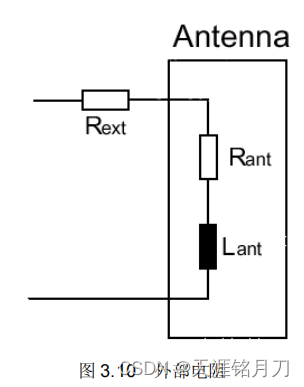
REXT 的值用下面的公式算出:

3、天线匹配电路电容的计算
图 3.11 显示了推荐使用的将天线线圈匹配到 50Ω 的电路 匹配用一个串联和一个并联电容来实现输入电阻 Z 要等于 50Ω。
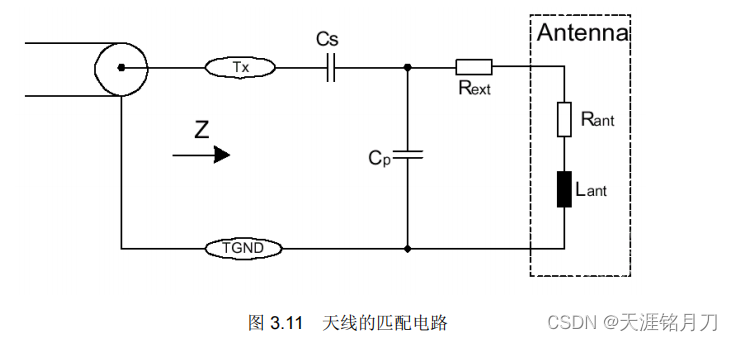
Cs 和 Cp 应当是 NP0 电介质的 SMD 类型 有很好的温度稳定性 我们建议将 Cp 分裂成一个固定的值和一个最大值是 10~20pF 的可变值 Cp’。
Cp 固定值对应图一中的C11、C12, Cp 可变值 Cp’对应图1中的C11 ~ C18。
4、环境对天线的影响
任何变化磁场都会在靠近读卡器天线的金属元件上感应出电压 这个感应电压会在金属平面上产生涡流,而涡流会导致天线去调并减弱磁场。结果是减少工作距离以及可能产生传输出错。
天线和大量金属元件的距离对于长距离 R/W 至少是 10cm 短距离 R/W 至少是 3cm 而且必须使
用密封的金属铁屏蔽。
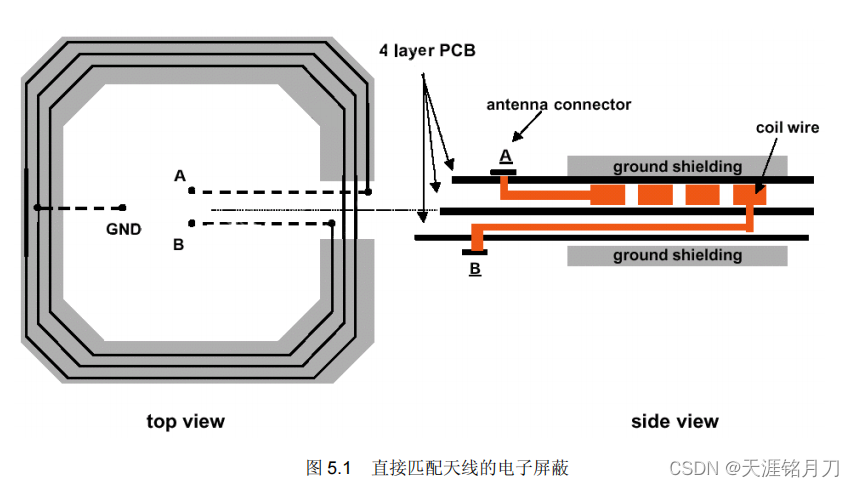
5、电子屏蔽对天线的影响(天线PCB绘制)
电子屏蔽用于减少天线线圈本身产生的电场 要在 PCB 上获得屏蔽的天线 PCB 要有 4 层而且在顶
层和低层都有屏蔽环 shielding loop 这些环必须不能重合 闭合 它不仅提供电子屏蔽 还能改良EMC性能。
三、程序设计步骤
通讯协议代码
1、RC522初始化 :RST引脚拉低硬复位、SPI接口初始化、RC522寄存器配置和模式设置初始化
2、寻卡:发送寻卡命令给RC522模块、RC522模块开始搜索附件的卡片,并返回卡片信息。
3、防冲突:如果同时存在多张卡片,RC522模块执行防冲突算法,以保证选中的只是某一张卡
4、选择卡片:根据卡片的唯一序列号,选择要与之通信的特定卡片。
5、验证和通信:对选定的卡片进行身份验证,需要提供密钥和扇区号等参数,通信成功可对卡片进行读写操作。(只需要读唯一ID的话,不需要验证)
6、通信结束:将RC522置于空闲状体或关闭RC522模块。
/*
* 函数名:SetBitMask
* 描述 :对RC522寄存器置位
* 输入 :ucReg,寄存器地址
* ucMask,置位值
* 返回 : 无
* 调用 :内部调用
*/
void SetBitMask ( unsigned char ucReg, unsigned char ucMask )
{
unsigned char ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp | ucMask ); // set bit mask
}
/*
* 函数名:ClearBitMask
* 描述 :对RC522寄存器清位
* 输入 :ucReg,寄存器地址
* ucMask,清位值
* 返回 : 无
* 调用 :内部调用
*/
void ClearBitMask ( unsigned char ucReg, unsigned char ucMask )
{
unsigned char ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp & ( ~ ucMask) ); // clear bit mask
}
/*
* 函数名:PcdAntennaOn
* 描述 :开启天线
* 输入 :无
* 返回 : 无
* 调用 :内部调用
*/
void PcdAntennaOn ( void )
{
unsigned char uc;
uc = ReadRawRC ( TxControlReg );
if ( ! ( uc & 0x03 ) )
SetBitMask(TxControlReg, 0x03);
}
/*
* 函数名:PcdAntennaOff
* 描述 :开启天线
* 输入 :无
* 返回 : 无
* 调用 :内部调用
*/
void PcdAntennaOff ( void )
{
ClearBitMask ( TxControlReg, 0x03 );
}
/*
* 函数名:M500PcdConfigISOType
* 描述 :设置RC522的工作方式
* 输入 :ucType,工作方式
* 返回 : 无
* 调用 :外部调用
*/
void M500PcdConfigISOType ( unsigned char ucType )
{
if ( ucType == 'A') //ISO14443_A
{
ClearBitMask ( Status2Reg, 0x08 );
WriteRawRC ( ModeReg, 0x3d );//3F 3d
WriteRawRC ( RxSelReg, 0x84 );//84 86
WriteRawRC( RFCfgReg, 0x4F ); //4F
WriteRawRC( TReloadRegL, 30 );//tmoLength);// TReloadVal = 'h6a =tmoLength(dec)
WriteRawRC ( TReloadRegH, 0 );
WriteRawRC ( TModeReg, 0x8D );
WriteRawRC ( TPrescalerReg, 0x3E );
_delay_us ( 2 );
PcdAntennaOn ();//开天线
}
}
/*
* 函数名:PcdRese
* 描述 :复位RC522
* 输入 :无
* 返回 : 无
* 调用 :外部调用
*/
void PcdReset ( void )
{
RC522_Reset_Disable();
_delay_us ( 1 );
RC522_Reset_Enable();
_delay_us ( 1 );
RC522_Reset_Disable();
_delay_us ( 1 );
WriteRawRC ( CommandReg, 0x0f );
while ( ReadRawRC ( CommandReg ) & 0x10 )
{
;
}
_delay_us ( 1 );
WriteRawRC ( ModeReg, 0x3D ); //定义发送和接收常用模式 和Mifare卡通讯,CRC初始值0x6363
WriteRawRC ( TReloadRegL, 30 ); //16位定时器低位
WriteRawRC ( TReloadRegH, 0 ); //16位定时器高位
WriteRawRC ( TModeReg, 0x8D ); //定义内部定时器的设置
WriteRawRC ( TPrescalerReg, 0x3E ); //设置定时器分频系数
WriteRawRC ( TxAutoReg, 0x40 ); //调制发送信号为100%ASK
}
/*
* 函数名:PcdComMF522
* 描述 :通过RC522和ISO14443卡通讯
* 输入 :ucCommand,RC522命令字
* pInData,通过RC522发送到卡片的数据
* ucInLenByte,发送数据的字节长度
* pOutData,接收到的卡片返回数据
* pOutLenBit,返回数据的位长度
* 返回 : 状态值
* = MI_OK,成功
* 调用 :内部调用
*/
char PcdComMF522 ( unsigned char ucCommand, unsigned char * pInData, unsigned char ucInLenByte, unsigned char * pOutData, unsigned int * pOutLenBit )
{
char cStatus = MI_ERR;
unsigned char ucIrqEn = 0x00;
unsigned char ucWaitFor = 0x00;
unsigned char ucLastBits;
unsigned char ucN;
unsigned int ul;
switch ( ucCommand )
{
case PCD_AUTHENT: //Mifare认证
ucIrqEn = 0x12; //允许错误中断请求ErrIEn 允许空闲中断IdleIEn
ucWaitFor = 0x10; //认证寻卡等待时候 查询空闲中断标志位
break;
case PCD_TRANSCEIVE: //接收发送 发送接收
ucIrqEn = 0x77; //允许TxIEn RxIEn IdleIEn LoAlertIEn ErrIEn TimerIEn
ucWaitFor = 0x30; //寻卡等待时候 查询接收中断标志位与 空闲中断标志位
break;
default:
break;
}
WriteRawRC ( ComIEnReg, ucIrqEn | 0x80 );//IRqInv置位管脚IRQ与Status1Reg的IRq位的值相反
ClearBitMask ( ComIrqReg, 0x80 ); //Set1该位清零时,CommIRqReg的屏蔽位清零
WriteRawRC ( CommandReg, PCD_IDLE ); //写空闲命令
SetBitMask ( FIFOLevelReg, 0x80 );//置位FlushBuffer清除内部FIFO的读和写指针以及ErrReg的BufferOvfl标志位被清除
for ( ul = 0; ul < ucInLenByte; ul ++ )
WriteRawRC ( FIFODataReg, pInData [ ul ] ); //写数据进FIFOdata
WriteRawRC ( CommandReg, ucCommand ); //写命令
if ( ucCommand == PCD_TRANSCEIVE )
SetBitMask(BitFramingReg,0x80); //StartSend置位启动数据发送 该位与收发命令使用时才有效
ul = 1000;//根据时钟频率调整,操作M1卡最大等待时间25ms
do //认证 与寻卡等待时间
{
ucN = ReadRawRC ( ComIrqReg ); //查询事件中断
ul --;
} while ( ( ul != 0 ) && ( ! ( ucN & 0x01 ) ) && ( ! ( ucN & ucWaitFor ) ) ); //退出条件i=0,定时器中断,与写空闲命令
ClearBitMask ( BitFramingReg, 0x80 ); //清理允许StartSend位
if ( ul != 0 )
{
if ( ! (( ReadRawRC ( ErrorReg ) & 0x1B )) ) //读错误标志寄存器BufferOfI CollErr ParityErr ProtocolErr
{
cStatus = MI_OK;
if ( ucN & ucIrqEn & 0x01 ) //是否发生定时器中断
cStatus = MI_NOTAGERR;
if ( ucCommand == PCD_TRANSCEIVE )
{
ucN = ReadRawRC ( FIFOLevelReg ); //读FIFO中保存的字节数
ucLastBits = ReadRawRC ( ControlReg ) & 0x07; //最后接收到得字节的有效位数
if ( ucLastBits )
* pOutLenBit = ( ucN - 1 ) * 8 + ucLastBits; //N个字节数减去1(最后一个字节)+最后一位的位数 读取到的数据总位数
else
* pOutLenBit = ucN * 8; //最后接收到的字节整个字节有效
if ( ucN == 0 )
ucN = 1;
if ( ucN > MAXRLEN )
ucN = MAXRLEN;
for ( ul = 0; ul < ucN; ul ++ )
pOutData [ ul ] = ReadRawRC ( FIFODataReg );
}
}
else
cStatus = MI_ERR;
}
SetBitMask ( ControlReg, 0x80 ); // stop timer now
WriteRawRC ( CommandReg, PCD_IDLE );
return cStatus;
}
/*
* 函数名:PcdRequest
* 描述 :寻卡
* 输入 :ucReq_code,寻卡方式
* = 0x52,寻感应区内所有符合14443A标准的卡
* = 0x26,寻未进入休眠状态的卡
* pTagType,卡片类型代码
* = 0x4400,Mifare_UltraLight
* = 0x0400,Mifare_One(S50)
* = 0x0200,Mifare_One(S70)
* = 0x0800,Mifare_Pro(X))
* = 0x4403,Mifare_DESFire
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdRequest ( unsigned char ucReq_code, unsigned char * pTagType )
{
char cStatus;
unsigned char ucComMF522Buf [ MAXRLEN ];
unsigned int ulLen;
ClearBitMask ( Status2Reg, 0x08 ); //清理指示MIFARECyptol单元接通以及所有卡的数据通信被加密的情况
WriteRawRC ( BitFramingReg, 0x07 ); // 发送的最后一个字节的 七位
SetBitMask ( TxControlReg, 0x03 ); //TX1,TX2管脚的输出信号传递经发送调制的13.56的能量载波信号
ucComMF522Buf [ 0 ] = ucReq_code; //存入 卡片命令字
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 1, ucComMF522Buf, & ulLen ); //寻卡
if ( ( cStatus == MI_OK ) && ( ulLen == 0x10 ) ) //寻卡成功返回卡类型
{
* pTagType = ucComMF522Buf [ 0 ];
* ( pTagType + 1 ) = ucComMF522Buf [ 1 ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/*
* 函数名:PcdAnticoll
* 描述 :防冲撞
* 输入 :pSnr,卡片序列号,4字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdAnticoll ( unsigned char * pSnr )
{
char cStatus;
unsigned char uc, ucSnr_check = 0;
unsigned char ucComMF522Buf [ MAXRLEN ];
unsigned int ulLen;
ClearBitMask ( Status2Reg, 0x08 ); //清MFCryptol On位 只有成功执行MFAuthent命令后,该位才能置位
WriteRawRC ( BitFramingReg, 0x00); //清理寄存器 停止收发
ClearBitMask ( CollReg, 0x80 ); //清ValuesAfterColl所有接收的位在冲突后被清除
ucComMF522Buf [ 0 ] = 0x93; //卡片防冲突命令
ucComMF522Buf [ 1 ] = 0x20;
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 2, ucComMF522Buf, & ulLen);//与卡片通信
if ( cStatus == MI_OK) //通信成功
{
for ( uc = 0; uc < 4; uc ++ )
{
* ( pSnr + uc ) = ucComMF522Buf [ uc ]; //读出UID
ucSnr_check ^= ucComMF522Buf [ uc ];
}
if ( ucSnr_check != ucComMF522Buf [ uc ] )
cStatus = MI_ERR;
}
SetBitMask ( CollReg, 0x80 );
return cStatus;
}
/*
* 函数名:CalulateCRC
* 描述 :用RC522计算CRC16
* 输入 :pIndata,计算CRC16的数组
* ucLen,计算CRC16的数组字节长度
* pOutData,存放计算结果存放的首地址
* 返回 : 无
* 调用 :内部调用
*/
void CalulateCRC ( unsigned char * pIndata, unsigned char ucLen, unsigned char * pOutData )
{
unsigned char uc, ucN;
ClearBitMask(DivIrqReg,0x04);
WriteRawRC(CommandReg,PCD_IDLE);
SetBitMask(FIFOLevelReg,0x80);
for ( uc = 0; uc < ucLen; uc ++)
WriteRawRC ( FIFODataReg, * ( pIndata + uc ) );
WriteRawRC ( CommandReg, PCD_CALCCRC );
uc = 0xFF;
do
{
ucN = ReadRawRC ( DivIrqReg );
uc --;
} while ( ( uc != 0 ) && ! ( ucN & 0x04 ) );
pOutData [ 0 ] = ReadRawRC ( CRCResultRegL );
pOutData [ 1 ] = ReadRawRC ( CRCResultRegM );
}
/*
* 函数名:PcdWrite
* 描述 :写数据到M1卡一块
* 输入 :unsigned char ucAddr,块地址
* pData,写入的数据,16字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdWrite ( unsigned char ucAddr, unsigned char * pData )
{
char cStatus;
unsigned char uc, ucComMF522Buf [ MAXRLEN ];
unsigned int ulLen;
ucComMF522Buf [ 0 ] = PICC_WRITE;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
if ( cStatus == MI_OK )
{
//memcpy(ucComMF522Buf, pData, 16);
for ( uc = 0; uc < 16; uc ++ )
ucComMF522Buf [ uc ] = * ( pData + uc );
CalulateCRC ( ucComMF522Buf, 16, & ucComMF522Buf [ 16 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 18, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
}
return cStatus;
}
/*
* 函数名:PcdSelect
* 描述 :选定卡片
* 输入 :pSnr,卡片序列号,4字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdSelect ( unsigned char * pSnr )
{
char ucN;
unsigned char uc;
unsigned char ucComMF522Buf [ MAXRLEN ];
unsigned int ulLen;
ucComMF522Buf [ 0 ] = PICC_ANTICOLL1;
ucComMF522Buf [ 1 ] = 0x70;
ucComMF522Buf [ 6 ] = 0;
for ( uc = 0; uc < 4; uc ++ )
{
ucComMF522Buf [ uc + 2 ] = * ( pSnr + uc );
ucComMF522Buf [ 6 ] ^= * ( pSnr + uc );
}
CalulateCRC ( ucComMF522Buf, 7, & ucComMF522Buf [ 7 ] );
ClearBitMask ( Status2Reg, 0x08 );
ucN = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 9, ucComMF522Buf, & ulLen );
if ( ( ucN == MI_OK ) && ( ulLen == 0x18 ) )
ucN = MI_OK;
else
ucN = MI_ERR;
return ucN;
}
/*
* 函数名:PcdAuthState
* 描述 :验证卡片密码
* 输入 :ucAuth_mode,密码验证模式
* = 0x60,验证A密钥
* = 0x61,验证B密钥
* unsigned char ucAddr,块地址
* pKey,密码
* pSnr,卡片序列号,4字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdAuthState ( unsigned char ucAuth_mode, unsigned char ucAddr, unsigned char * pKey, unsigned char * pSnr )
{
char cStatus;
unsigned char uc, ucComMF522Buf [ MAXRLEN ];
unsigned int ulLen;
ucComMF522Buf [ 0 ] = ucAuth_mode;
ucComMF522Buf [ 1 ] = ucAddr;
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 2 ] = * ( pKey + uc );
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 8 ] = * ( pSnr + uc );
cStatus = PcdComMF522 ( PCD_AUTHENT, ucComMF522Buf, 12, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ! ( ReadRawRC ( Status2Reg ) & 0x08 ) ) )
{
cStatus = MI_ERR;
}
return cStatus;
}
/*
* 函数名:PcdIncrement
* 描述 :增加数据到M1卡一块
* 输入 :unsigned char ucAddr,块地址
* pData,写入的数据,16字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdIncrement ( unsigned char ucAddr, unsigned char * pData )
{
char cStatus;
unsigned char uc, ucComMF522Buf [ MAXRLEN ];
unsigned int ulLen;
ucComMF522Buf [ 0 ] = PICC_INCREMENT;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
if ( cStatus == MI_OK )
{
for ( uc = 0; uc < 4; uc ++ )
ucComMF522Buf [ uc ] = * ( pData + uc );
CalulateCRC ( ucComMF522Buf, 4, & ucComMF522Buf [ 4 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 6, ucComMF522Buf, & ulLen );
if( cStatus != MI_ERR )
{
cStatus = MI_OK;
}
}
if( cStatus == MI_OK )
{
ucComMF522Buf [ 0 ] = PICC_TRANSFER;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
}
return cStatus;
}
/*
* 函数名:PcdRead
* 描述 :读取M1卡一块数据
* 输入 :unsigned char ucAddr,块地址
* pData,读出的数据,16字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdRead ( unsigned char ucAddr, unsigned char * pData )
{
char cStatus;
unsigned char uc, ucComMF522Buf [ MAXRLEN ];
unsigned int ulLen;
ucComMF522Buf [ 0 ] = PICC_READ;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus == MI_OK ) && ( ulLen == 0x90 ) )
{
for ( uc = 0; uc < 16; uc ++ )
* ( pData + uc ) = ucComMF522Buf [ uc ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/*
* 函数名:PcdHalt
* 描述 :命令卡片进入休眠状态
* 输入 :无
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdHalt( void )
{
unsigned char ucComMF522Buf [ MAXRLEN ];
unsigned int ulLen;
ucComMF522Buf [ 0 ] = PICC_HALT;
ucComMF522Buf [ 1 ] = 0;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
return MI_OK;
}
char IC_CMT ( unsigned char * UID, unsigned char * KEY, unsigned char RW, unsigned char addr, unsigned char * Dat )
{
unsigned char ucArray_ID [ 4 ] = { 0 };//先后存放IC卡的类型和UID(IC卡序列号)
unsigned char ICstate=MI_ERR;
ICstate=PcdRequest ( 0x52, ucArray_ID );//寻卡
if(ICstate==MI_OK)
{
UID[1]=ucArray_ID[0];
UID[2]=ucArray_ID[1];
UID[3]=ucArray_ID[2];
UID[4]=ucArray_ID[3];
}
if(ICstate==MI_OK)
{
ICstate=MI_ERR;
ICstate=PcdAnticoll ( UID+1 );//防冲撞
}
if(ICstate==MI_OK)
{
ICstate=MI_ERR;
ICstate=PcdSelect ( UID+1 );//选定卡
}
/*
if(ICstate==MI_OK)
{
ICstate=MI_ERR;
ICstate=PcdAuthState ( 0x60, addr, KEY, UID );//校验
}
if(ICstate==MI_OK)
{
ICstate=MI_ERR;
if ( RW==1 )//读写选择,1是读,0是写,2是增,3是减
ICstate=PcdRead( addr, Dat );
else if(RW==2)
ICstate=PcdIncrement( addr, Dat );
else
ICstate=PcdWrite( addr, Dat );
}*/
if(ICstate==MI_OK)
{
ICstate=MI_ERR;
ICstate=PcdHalt ();
}
return ICstate;
}
/*
* 函数名:RC522_Init
* 描述 :初始化RC522
* 输入 :无
* 返回 : 无
* 调用 :外部调用
*/
void RC522_Init ( void )
{
RC522_Reset_Disable();
RC522_CS_Disable();
PcdReset ();
M500PcdConfigISOType ( 'A' );//设置工作方式
}