文章目录
- 一、农业机器人
- 二、国际农业机器人现状
- 三、我国农业机器人发展情况
- 四、农业机器人展望
- 五、结束语
2022年9月17-18日,第十一届中国智能产业高峰论坛成功在厦门举办。大会主论坛上,CAAI副理事长、中国工程院院士、国家农业信息化工程技术研究中心研究员、CAAI
Fellow赵春江院士为我们带来了题为《农业机器人研究进展》的精彩演讲。
一、农业机器人
世界科学家围绕机器人进行不断探讨。1920年捷克作家卡佩克科幻剧本《罗萨姆的万能机器人》, 机器人捷克语Robota是奴隶的意思。1967年日本第 一届机器人会议上, 加藤一郎提出,机器人具有脑、手、脚等三要素;具有非接触传感器和接触传感器;具有平衡觉和固有觉的传感器。中国科学家的定义为,机器人是具备一些与人或生物相似的智能能力的自动化机器。
农业机器人(Agribot)维基百科的定义为可用于农业生产活动的机器人。农业机器人我们从最朴素的角度去理解,是指用于农业生产,具有感知、决策、控制与执行能力的多自由度自主作业装备,主要包括信息感知系统、决策控制系统、作业执行机构和自主移动平台,也即“ 眼、脑、手、脚”。信息感知部分基于视觉、触觉、听觉、味觉技术的空间环境、靶标位置与形态等多模态信息感知系统 (人的五官) ;决策控制部分体现在机器脑,以及对象识别、场景分析、路径判断和任务规划 (人的脑);作业执行部分体现在高效鲁棒机器人专用驱动及末端执行机构 (人的手脚)。工程实际应用中,农业机器人与人工智能、大数据、云计算、物联网结合,构成了农业机器人应用系统,丰富了农业机器人概念的内涵与外延。
目前,中国从事农业生产的劳动力不断减少,人工成本不断增加,所以对农业机器人的需求快速增加。1991年我国农业劳动力占全社会劳力的61%,现在已低于25%;而实现农业现代化的发达国家,比如美国,基本上在1%左右。未来随着城市化的发展,农村劳动力还会持续减少,对机器人需求越来越大。同时,中国还面临着一个老龄化问题,从2016年开始,老年人占比迅速增加,也导致了农业对机器人的需求快速增长。这个趋势不仅体现在中国,也体现在全球各国,特别是日本。《世界人口展望:2019年修订版》的数据显示,到2050年,全世界每6人中就有1人年龄在65岁(16%) 以上,在欧洲和北美,每4人中将有1人年龄在65岁或以上。2018年,全球65岁或以上人口史无前例地超过了5岁以下人口数量。此外,预计80岁或以上人口将增长2倍,从2019年的1.43亿增至2050年的4.26亿。
二、国际农业机器人现状
农业机器人发展迅速,农业作业对象的多样性和复杂性,决定了农业机器人的多样性。按应用领域分类有很多,例如大田农业机器人、温室农业机器人、林果业机器人、畜牧业机器人和水产业机器人等。
国际学术界对农业机器人研究愈加重视,2017年《时代周刊》将年度最佳发明奖颁发给了Hortirobot除草机器人;2008年IEEE Robotics and Automation Society ( IEEE RAS)成立了专门的农业机器人与自动化学术委员会;2009年世界地面移动机器人顶级期刊Field Robotics组织了农业机器人专刊;2010年IEEE RAS与世界自动化与控制联合会(IFAC)共同举办了关于农业机器人的讨论会Agicontrol;欧盟“地平线 2020”资助系列的农业机器人项目,如CROPS 、Sweeper和MARS;2017年英国启动了世界上首个无人农场项目Hands FreeHectare ;2018年世界机器人大会 (WRC) 全球欧美专家发言均关注了农业机器人,同年机器人顶级会议( IROS ) 组织了3个农业机器人正式Session,开始重点关注农业机器人;2019年世界机器人大会设立了机器人农业应用专题论坛;2021年在英国召开了International Conference on Agricultural Robotics and Automation (ICARA)会议。从2018年开始,很多专家在各种相关场合都谈到了农业机器人。近几年,在北京召开的年度世界机器人大会里,都有一个专门农业机器人分会,农业机器人得到了学界广泛关注。
根据我们对顶级国际会议ICRA和IROS近几年的热词分析结果可以看出,机器人前沿基础研究的热点主要集中于深度学习、移动路径规划、自主学习与自适应、同步建图与定位(SLAM)、多机器人系统、优化计算与最优控制等,代表了国际机器人研究向自主、智能、共融和协作的发展趋势。全球知名农业机器人公司及其代表产品如雨后春笋般涌现出来,有搬运的、采摘的、除草的,还有农产品分拣的……
农业机器人主要在不适合人操作的恶劣环境和人工需求特别大情景下发挥重要作用。例如,国外的锄草机器人可以防止人工打药带来的中毒危险,同时对环境安全和农产品安全具有重要意义。这类机器人的应用场景虽然相对比较简单,但是它从感知到决策、到控制、到作业整个环节都连接起来,为未来展现了美好的蓝图和前景。
目前,农业机器人市场现状从全球来看,无人驾驶拖拉机、喷药无人机和挤奶机器人是目前市场化份额最大的三类。欧美农业机器人企业重点关注采摘和锄草等复杂作业的方方面面,如机器人视觉顶尖机构CMU(卡耐基梅隆)的Robotanist、 “欧洲波士顿动力”ETH (瑞士苏黎世理工)的Rowesys除草机器人等。国际上,研究农业机器人 比较活跃的研究机构有美国华盛顿州立大学、荷兰瓦赫宁根大学、英国哈珀亚当斯大学和德国波恩大学等。
欧盟专门支持的项目AgROBOfood,根据不同区域的生产特征和种养类型划分区域 , 研发适宜该区域农业生产的农业机器人;agROBOfood通过建立可持续的数字创新中心网络,将机器人研发与农业业务联系起来;AgROBOfood将与更广泛的欧洲机器人团队密切合作,通过EU-Robotics等计划确保协同效应,提高欧洲农业与食品的效率和竞争力,降低对人工的依赖。
欧盟还资助农业机器人项目群,包括甜椒收获机器人(AI&ROB)、数据驱动的奶农决策(IOT)、食品和农场物联网(IOT)、数据驱动的生物经济(Big Data)等,以促进欧洲农业更高效和可持续发展,充分展现了对农业机器人的高度关注。
国际上一些咨询机构,如美国商业资讯,对农业机器人市场进行了预测,2020年全球农业机器人市场规模74亿美元,到2025年市场规模将达到206亿元,年复合增长率达到22.8%;桑德勒研究所对此也进行了预测,2020年市场规模46亿美元,到 2025年能达到203亿市值,年复合增长率达到34.5%。
在当前疫情背景下,农业机器人发展更快。图1所示的是Tractica对农业机器人的收入和出口全球市场预测,由图1可见,2025年农业机器人将达到879亿美元,有72万台农业机器人会投入到生产实践中。

图1 全球农业机器人的收入和出口市场预测
三、我国农业机器人发展情况
(一)我国农业机器人发展的总体情况
我国农业机器人研究起步于1990年。
这些年来,我国科研人员根据农业特点与需求,开展了农业机器人的研究。在自动驾驶拖拉机、小型农业移动平台、嫁接机器人、移载机器人、果实分拣机器人、采摘机器人、农田信息监测机器人和植保无人机等方面展开了大量研究工作,并在自动驾驶农机、植保无人机和挤奶机器人等方面已有很好的应用。2017年7月8日,我国首个农业无人系统应用示范基地在江苏兴化启动。2017年我国民用无人机销售规模62亿元人民币。据慧飞无人机应用技术培训中心的调研数据显示,目前无人机有10多万台, 每年包括农民作业面积达到10亿亩次的规模,相关产业市场规模近1000亿元人民币。
(二)我国典型农业机器人发展现状
- 采摘机器人
采摘机器人通用平台可用于高架立体栽培模式下不同高度层次的果实采收,提高了智能采收机器人的实用性,有利于智能采收设备向产业应用的进一步发展。从视觉定位到柔性采摘都进行了黄瓜采收机器人相关技术的研发;番茄采摘机器人基于视觉伺服的果串激光对靶空间测量,采用双线程“眼手”协同高效作业机制,面向非机构农业环境的机器人作业系统集成。但是,目前采摘机器人的采摘效率还比较低,黄瓜和番茄采摘最快的速度大概是摘一个果11s,我国是13s。未来如果人工智能技术,特别是通过算法的提升,能够快速识别定位,将会进一步提高采摘的操作速度。
- 蔬菜苗床监测管理机器人
蔬菜苗床监测管理机器人,基于环境光照波动补偿进行秧苗叶片图像信息获取,采取主动夹持式穴盘苗移栽操作手爪,通过蔬菜苗床智能管理作业平台,把好的苗子和不好的苗子分开。
- 苹果采摘机器人
苹果是全球产量最大的水果之一,中国苹果产量占全球55%以上,种植规模200万公顷,年产量约4300万吨,占全国水果总产量20%。苹果生产劳动力成本在总成本占比高达66%,由于采收环节机械化率低(不足3%),人工综合采摘效率200公斤/天。迫切需求“采-收-运”一体作业的苹果采摘机器人。
我国标准果园典型树形为矮化密植高纺锤形,目前我们在目标识别、采摘执行机构关键技术已取得重要进展,但需要加强适宜我国农艺条件的高效采摘机器人的集成研发。
实际中,果树树冠内枝叶丛生、果实密集,果实粘连遮挡,限制了机器人信息感知;机器人动态作业过程中,果实位姿随机偏移,影响了机器人对其进行精准操作;而解析远-近景复合视场中果实目标与执行机构的运动耦合关系,是机器人进行视觉伺服动态跟踪控制的必要前提。近三四年来,我们团队对苹果采摘机器人开展了多方面研究,取得了很好的进展,但是要达到商业化还有一定距离。此外,我们也在探索采摘猕猴桃机器人,但是太难,目前没有商业化的产品。
对苹果采摘机器人,世界各国开展了不同路径和模式的探索研究。如美国在苹果树冠结构进行了重要的变革,把整个树干进行扁平化,苹果树就像篱笆墙一样,冠层厚度大大减少,苹果果实方便识别和采摘,使机器人采摘变成一种可能。同时,有的国家也在探索无人机采摘的模式。
- 其他机器人系统
其他机器人系统,如畜牧行业禽舍健康状况巡检机器人系统。这类机器人具有无人值守,以及可见光、热成像、声纹信息等多模信息融合分析能力,在鸡场内可对二氧化碳、氨气和甲烷等有害气体探测,也可以探测动物的生命。如通过鸡的叫声可以判断鸡的营养健康状况等,实现基于生理和行为多角度禽舍蛋鸡异常巡检。此外,畜禽养殖防疫消毒也有机器人,用于畜禽养殖环境无人化智能防疫消毒作业,支持遥控和自动作业模式,可实现智能化定时、定点、定量消毒作业,目前在国内很多养殖场已经投入运用。
总的来讲,我国农业机器人和发达国家水平差距明显,一是机械设备与农艺结合的不够紧密;二是稳定性、故障率、易用性等指标还有待提升;三是成本较高,生产效率偏低;四是智能化程度不高,核心算法差距显著。
四、农业机器人展望
(一)农业机器人的特点
农业机器人与工业机器人相比有它独特的特点,一是农业的非结构化环境,如全世界没有一棵相同的果树结构。另外,农作物相互遮挡、颜色纹理复杂,晴天与阴雨天、白天与黑夜的光环境变化;二是农业对象的生物特性——移动性、柔软性和商品性;三是要求高技术但还要低成本,因农业效益低,成本高了无法大规模推广。这些因素叠加在一起,导致农业机器人的发展难度非常大。
未来机器人已不是单纯的一个机器人本体,其与大数据、云智能和物联网等结合会变成一个智能的农业机器人系统。农业无人农场就属于这类,高度智能化的机器加上以网络为基础的连接控制,形成自主作业系统,这是农业机器人未来发展方向。
未来发展农业机器人,就要从“眼”(智能感知)、“脑”(决策控制)、“手”(灵巧执行)和“脚”(自主移动)等不同环节进行研究,如图2所示,里面有相当多关键核心技术。此外,场景感知非常重要,因为很多对象在环境中不断移动,构建了一个特殊的场景,机器人提前判断、决策和导控的,而不是简单的目标对象的靶向识点,所以机器人应该有相应的预判决策能力。

图2 智能农业机器人系统关键技术
新一代人工智能的核心是数据、算法和算力,随着新一代人工智能进一步发展,未来农业机器人的研究,要瞄盯人工智能发展的新三要素——场景、系统和算力进一步探索。而场景、系统和算力新三要素非常复杂,特别是场景的板块,我们对场景的感知、提前的预判这些方面需要很好的算法。农业机器人是新一代人工智能很好的应用场景,应该努力把人工智能的软算法转变成机器人智能的硬实力。未来高水平的农业机器人一定需要人工智能的技术支撑。
(二)农业机器人发展未来的瓶颈问题
- 作业场景难题
( 1 )环境复杂多变。农业环境具有典型的非结构化特征,而且存在很多不确定干扰因素,如光照条件多样,刮风、下雨、风尘等天气因素的干扰,对农业机器人的适应能力提出了挑战。
( 2 )对象复杂多变。相比标准化的工业对象,农业对象具有自身的特点,对机器人的对象识别/定位能力、灵活/柔性操作能力提出了挑战。
- 理论/技术瓶颈
( 1 )场景的感知。深度学习在图像、点云识别方面取得了巨大成功,但在应对农业对象识别方面仍有未突破的瓶颈问题。未来加强深度学习在图像、点云识别方面的探索研究,将有利于突破复杂场景下的感知。
( 2 )行为规划。农业机器人在感知观测、动作执行和协同配合等方面均存在一定的不确定性,对其多源不确定性条件下的高效、安全规划问题提出了挑战。比如养殖场里给鸡打针,它是动的,我们对它的下一个动作和方向应该有一个提前预知,在打针时能够准确打中目标。
( 3 )执行系统。农业机器人执行系统在材料、构型、动力和控制等方面存在瓶颈,难以满足作业任务需求。
- 市场瓶颈
( 1 )成本高、价格昂贵使农民接受度不高。
( 2 )作业效率不具备比较优势,是一个很大的挑战。发挥机器人的优势,实现农机农艺融合,多机并行作业是未来的发展方向。
(三)加强农业机器人技术创新
引入新技术是实现高水平农业机器人的创新发展的潜在变量。
通过人工智能的深度学习、核心算法,提高农业机器人的感知能力和决策能力,特别是使用深度学习方法和技术对表型特征、场景和作物病害等进行识别,优化运动路径、作业姿态和作业次序等。研究触觉反馈控制增强农业机器人感知、执行能力,防止采摘农产品过程中,末端执行器夹持力太大对产品商品品质的破坏。人机共融可以提高作业效率,可以使机器的智能达到极大的提升,大幅度降低成本,这是解决当前面临复杂场景条件下,进一步提高机器质量的方法手段。多智能体理论有望提升农业机器人协同作业效率,因为多智能体的自主性、分布性和协调性特点,有利于最大化农业机器人空地协同、多机协同效能。多机器人协同作业,多个机器同时完成共同的一个任务,如果一个机器人发生问题,其他机器人可以继续完成任务。多臂并行作业可以提高采摘机器人效率,如美国Harvest Croo草莓采摘机器人、西班牙Agrobot 草莓采摘机器人采取的就是这种方式。多臂并行作业虽然能够大幅提高采摘机器人作业效率,但也面临农艺流程改进、供电/控制等辅助设备庞杂,以及多臂间的任务协调分工与规划等问题。新材料的研究可以改善农业机器人执行能力,如目前纳米材料、复合材料、3D打印都可以助力未来农业机器人的发展。未来农业机器人创新研究重点如下所述。
- 智能感知技术(“眼睛”)
要加强感知技术,包括传感器件、特征提取,还要实现信息的融合(见图3) 。信息的融合是我们进行决策的基础。

图3 智能感知共性关键技术
- 智能决策技术(“大脑”)
提高智能决策的水平,要把算法工具和作业决策结合在一起(见图4), 同时也需要总线控制平台,使机器人在可控的环境条件下,能够快速按照人的要求去作业。在算法工具里任务协调与优化、深度 学习、知识表征和推理、知识牵引都非常重要。
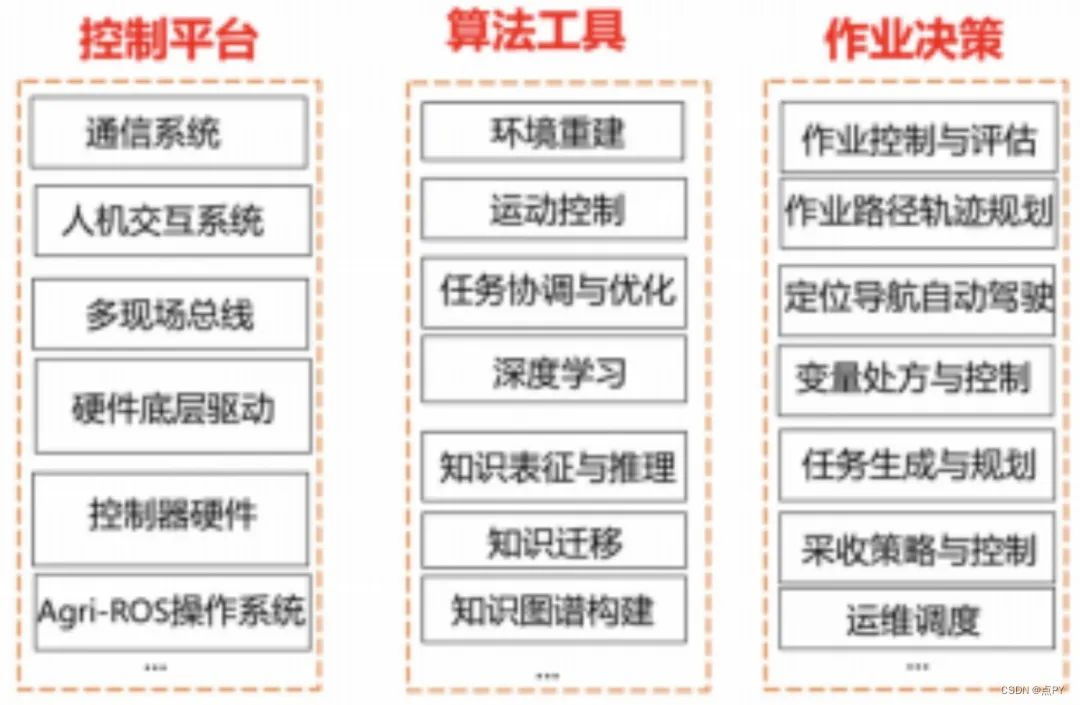
图4 智能决策共性关键技术
- 灵巧作业技术(“手臂”)
如图5所示,灵巧作业的关键技术包括手臂设计、作业规划和作业控制。手臂设计方面,要对材料和对象的物理特征进行研究;把动力学规划、多臂任务规划,以及轨迹与避碰规划等结合在一起,同时通过控制方法和控制技术,使农业机器人能够快速、有效和准确的工作。

图5 灵巧作业共性关键技术
- 移动平台技术(“腿脚”)
自主移动共性关键技术主要包括移动平台、定位导航和自主移动(见图6)。要研发适合农业非结构行走地面的移动平台(如“四轮机器人”的平台)。将卫星定位、惯性导航和视觉导航等各种技术,包括激光、雷达等各方面进行组合应用,以保证能够对机器人很好地实时控制和了解轨迹、位置。
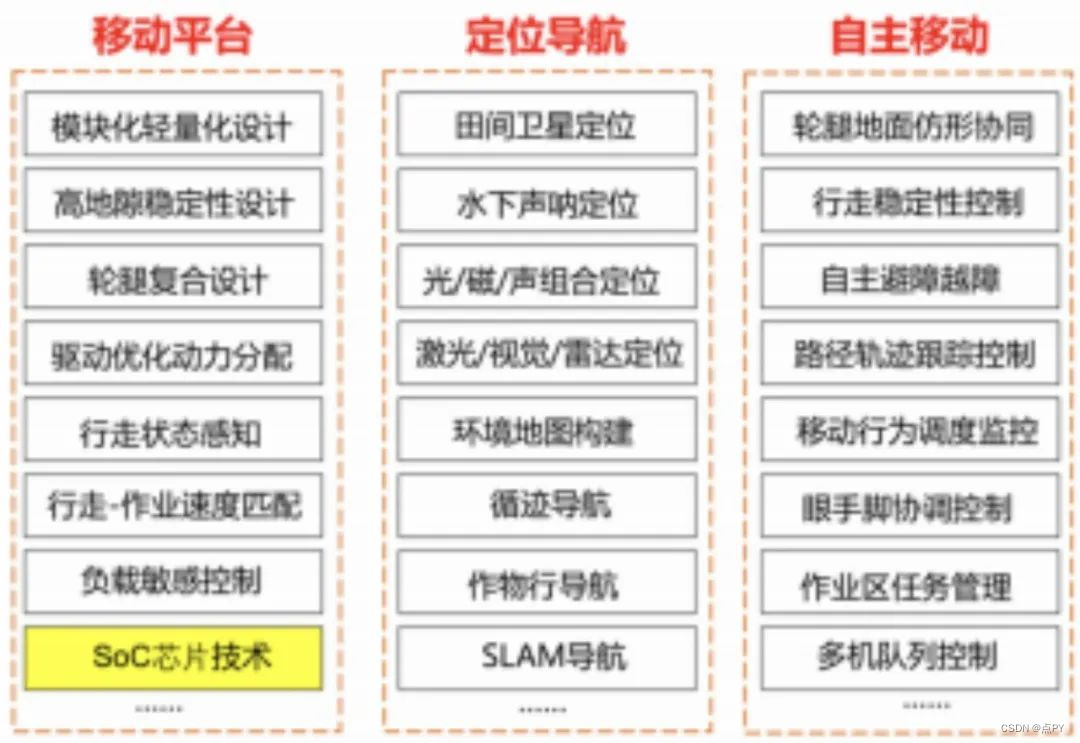
图6 自主移动平台共性关键技术
五、结束语
本报告对农业机器人一些基本情况进行了介绍,希望我们从事人工智能研究的科学家,包括产业界的朋友向农业机器人领域进军,共同促进我国现代农业的发展,提升现代农业的水平。
参考
https://mp.weixin.qq.com/s/f8sRurROgHQSIPtUsu2FQw