项目作业1:TCP机械臂测试
客户端操作代码:
/*机械臂客户端控制代码*/
#include <myhead.h>
#define SER_IP "192.168.125.176" //机械臂服务器IP地址
#define SER_PORT 8888 //机械臂服务器端口号
#define CLI_IP "192.168.125.75" //机械臂客户端ip地址
#define CLI_PORT 1314 //机械臂客户端端口号
/*主函数*/
int main(int argc, const char *argv[])
{
//创建套接字,获取文件描述符
int sfd;
if((sfd = socket(AF_INET, SOCK_STREAM, 0))==-1)
{
perror("socket error");
return -1;
}
//定义结构体,记录机械臂服务器的地址信息结构体
struct sockaddr_in sin;
sin.sin_family = AF_INET;
sin.sin_port = htons(SER_PORT);
sin.sin_addr.s_addr = inet_addr(SER_IP);
//客户端连接机械臂服务器
if(connect(sfd, (struct sockaddr*)&sin, sizeof(sin))==-1)
{
perror("connect error");
return -1;
}
//定义发送给机械臂服务器的信息载体数组
char red[5]={0xff,0x02,0x00,0x00,0xff};//控制红色的机械臂信息载体
unsigned char blue[5]={0xff,0x02,0x01,0x5A,0xff};//控制红色的机械臂信息载体
//先初始化机械臂位置
send(sfd,red,sizeof(red),0);
sleep(1);//防止沾包现象
send(sfd,blue,sizeof(blue),0);
puts("开始操作");
while(1)
{
char key;
scanf("%c",&key);
getchar();//吸收回车
switch(key)
{
case 'w':case 'W'://控制红色的机械臂每次向右偏移2角度
{
red[3]+=2;
if(red[3]>=90)//防止超出最大角度
{
red[3]=90;
}
send(sfd,red,sizeof(red),0);
}
break;
case 's':case 'S': //控制红色的机械臂每次向左偏移2角度
{
red[3]-=2;
if(red[3]<=-90)//防止超出最大角度
{
red[3]=-90;
}
send(sfd,red,sizeof(red),0);
}
case 'd':case 'D'://控制蓝色的机械臂每次向右偏移2角度
{
blue[3]+=2;
if(blue[3]>=180)//防止超出最大角度
{
blue[3]=180;
}
send(sfd,blue,sizeof(blue),0);
}
break;
case 'a':case 'A': //控制蓝色的机械臂每次向左偏移2角度
{
blue[3]-=2;
if(blue[3]<=0)//防止超出最大角度
{
blue[3]=0;
}
send(sfd,blue,sizeof(blue),0);
}
break;
case 'o':case 'O':
{
puts("操作结束");
goto END;
}
break;
}
}
END:
//关闭套接字
close(sfd);
return 0;
}
作业1演示视频
项目作业2:基于UDP的TFTP文件传输
客户端代码:
#include <myhead.h>
#define SER_IP "192.168.125.176" //服务器ip地址
#define SER_PORT 69 //服务器端口号
void down(int cfd,struct sockaddr_in sin,int size);
void uplo(int cfd,struct sockaddr_in sin,int size);
int main(int argc, const char *argv[])
{
//创建套接字
int cfd=socket(AF_INET,SOCK_DGRAM,0);
if(cfd==-1)
{
perror("socket error");
return -1;
}
//定义容器记录服务器的地址信息结构体
struct sockaddr_in sin;
sin.sin_family=AF_INET;
sin.sin_port=htons(SER_PORT);
sin.sin_addr.s_addr=inet_addr(SER_IP);
int size=sizeof(sin);
int nember;
while(1)
{
system("clear"); //执行终端指令
printf("\t\t======XXX登录界面============\n");
printf("\t\t======1、下载============\n");
printf("\t\t======2、上传============\n");
printf("\t\t======0、退出============\n");
printf("请输入选项:");
scanf("%d", &nember);
getchar();
//对菜单多分支选择
switch(nember)
{
case 1:
{
/*下载功能*/
down(cfd,sin,size);
}
break;
case 2:
{
/*上传功能*/
uplo(cfd,sin,size);
}
break;
case 0:
{
puts("退出客户端");
goto END;
}
default:printf("您输入的功能有误,请重新输入\n");
}
//提示输入任意键按回车结束
printf("请输入任意键按回车结束!!!\n");
while(getchar() != '\n');
}
END:
//关闭套接字
close(cfd);
return 0;
}
//下载功能函数
void down(int cfd,struct sockaddr_in sin,int size)
{
//下载请求:
//组建协议包
char pack[516];
char filename[100];
printf("请输入要下载的文件名:");
fgets(filename,sizeof(filename),stdin);
filename[strlen(filename)-1]='\0';
short *p1=(short *)pack;
*p1=htons(1);
char *p2=pack+2;
strcpy(p2,filename);
char *p4=p2+strlen(p2)+1;
strcpy(p4,"octet");
int packlen=4+strlen(p2)+strlen(p4);
//向服务器发送下载请求包
sendto(cfd,pack,packlen,0,(struct sockaddr*)&sin,sizeof(sin));
int fd = -1;
if((fd = open(filename,O_RDWR|O_CREAT|O_TRUNC, 0664)) == -1)
{
perror("op en error");
}
//收发数据
while(1)
{
//收取服务器发来的数据包
//判断操作码,以及数据包数据内容是否达到512字节
//如果是512,则回复应答包,接续接收下一个
//如果小于512,则回复应答包,结束接收数据
bzero(pack,sizeof(pack));//清空数据包信息载体
int res=recvfrom(cfd,pack,sizeof(pack),0,(struct sockaddr*)&sin,&size);//接收数据包
//判断操作码
if(*p1==ntohs(3))//收到数据包
{
write(fd,pack+4,res-4);
if(res<516)
{
printf("下载完毕\n");
break;
}
*p1=htons(4);
strcpy(p2,pack+2);
bzero(pack+4,res-4);
sendto(cfd,pack,sizeof(pack),0,(struct sockaddr*)&sin,sizeof(sin));//发送ACK包
}
else if(*p1==ntohs(5))
{
write(1,pack+4,res-5);
break;
}
}
close(fd);
}
//上传功能
void uplo(int cfd,struct sockaddr_in sin,int size)
{
//上传请求:
//组建协议包
char pack[516];
char filename[100];
printf("请输入要上传的文件名:");
fgets(filename,sizeof(filename),stdin);
filename[strlen(filename)-1]='\0';
short *p1=(short *)pack;
*p1=htons(2);
char *p2=pack+2;
strcpy(p2,filename);
char *p4=p2+strlen(p2)+1;
strcpy(p4,"octet");
int packlen=4+strlen(p2)+strlen(p4);
//向服务器发送上传请求包
sendto(cfd,pack,packlen,0,(struct sockaddr*)&sin,sizeof(sin));
int fd;
if((fd = open(filename,O_RDONLY)) == -1)
{
perror("open error");
}
int count=512;
int i=0;
//收发数据
while(1)
{
bzero(pack,sizeof(pack));//清空数据包信息载体
int n=recvfrom(cfd,pack,sizeof(pack),0,(struct sockaddr*)&sin,&size);//接收ACK包
//判断操作码
if(*p1==ntohs(4))//收到的包是ACK包
{
bzero(pack+4,n-4);
//发送数据包到服务器
int res=read(fd,pack+4,count);
*p1=htons(3);
i++;
*(unsigned short*)p2=htons(i);
sendto(cfd,pack,sizeof(pack),0,(struct sockaddr*)&sin,sizeof(sin));//发送数据包到服务器
if(res<=0)
{
printf("上传完毕\n");
break;
}
}
else if(*p1==ntohs(5))
{
write(1,pack+2,2);
write(1,pack+4,n-5);
break;
}
}
close(fd);
}
作业2演示视频
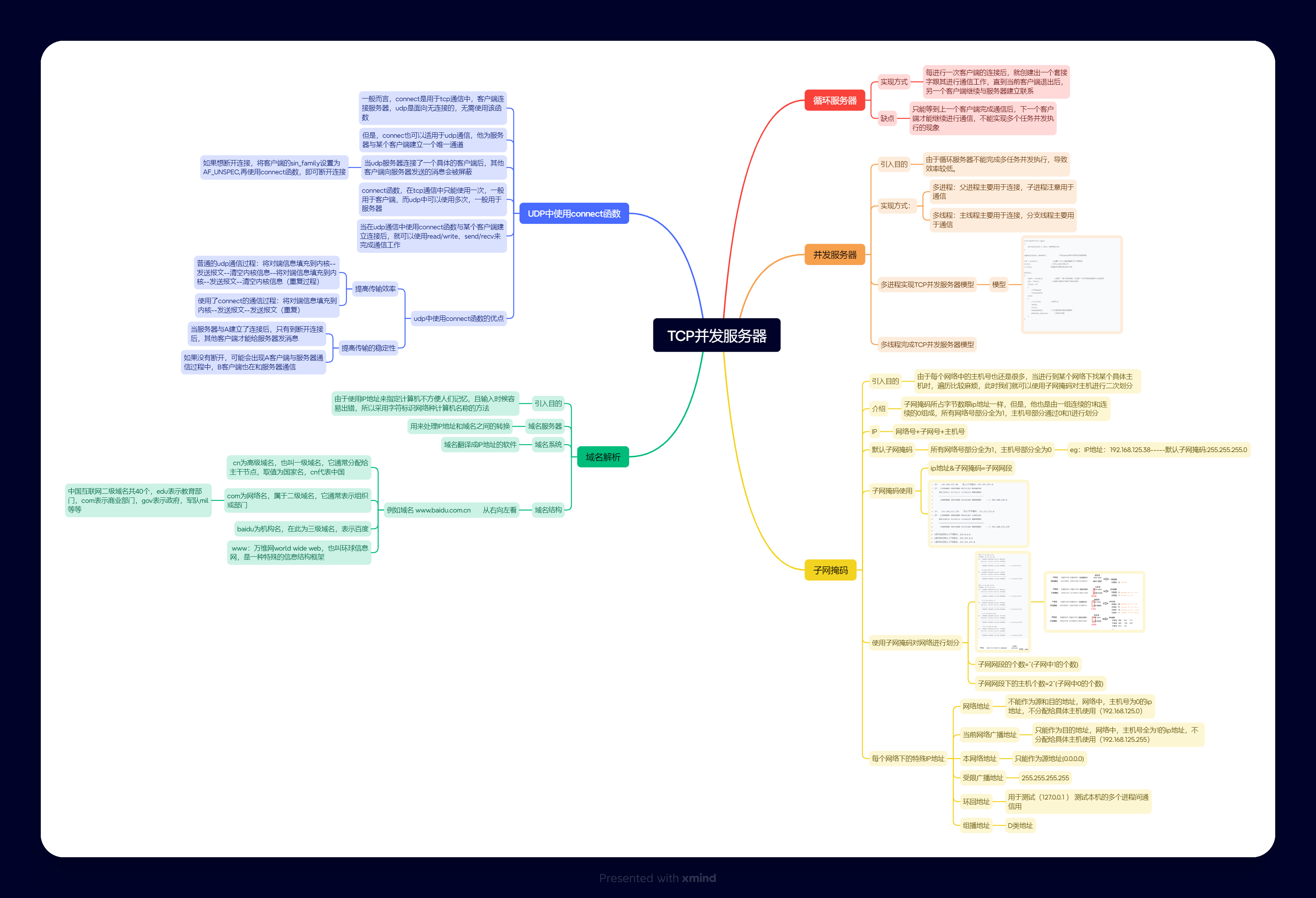
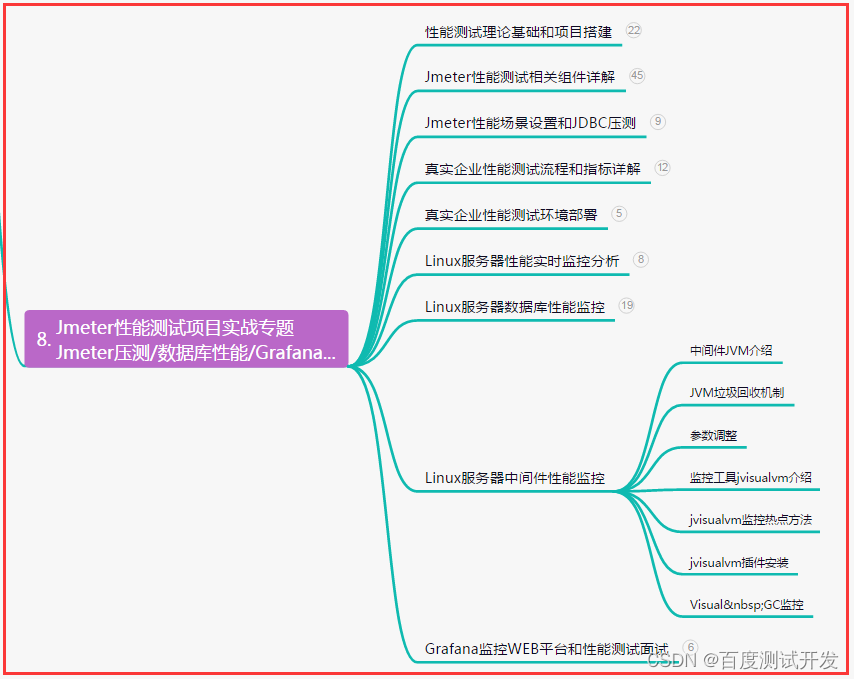
思维导图


![[Vulnhub]靶场 Red](https://img-blog.csdnimg.cn/direct/908c0ef3ca7a40c38b753475fd84516d.png)