Android minigbm框架普法
引言
假设存在这么一个场景,我的GPU的上层实现走的不是标准的Mesa接口,且GPU也没有提专门配套的gralloc和hwcompoer实现。那么我们的Android要怎么使用到EGL和GLES库呢,并且此GPU驱动是支持drm实现的,也有video overlay层。这个就是我们这个博客准备或者是探索要解决的。这里无意中发现mingbm + hwcompoer的组合可能解决,这里我就花费一定的时间来分析这个模块!
一.minigbm结构
1.1 minigbm目录结构
minigbm
├── amdgpu.c
├── Android.bp
├── Android.gralloc.mk
├── common.mk
├── cros_gralloc
├── dri.c
├── dri.h
├── drv.c
├── drv.h
├── drv_priv.h
├── evdi.c
├── exynos.c
├── gbm.c
├── gbm.h
├── gbm_helpers.c
├── gbm_helpers.h
├── gbm.pc
├── gbm_priv.h
├── helpers_array.c
├── helpers_array.h
├── helpers.c
├── helpers.h
├── i915.c
├── LICENSE
├── Makefile
├── marvell.c
├── mediatek.c
├── meson.c
├── METADATA
├── MODULE_LICENSE_BSD
├── msm.c
├── nouveau.c
├── OWNERS
├── OWNERS.android
├── PRESUBMIT.cfg
├── presubmit.sh
├── radeon.c
├── rockchip.c
├── synaptics.c
├── tegra.c
├── udl.c
├── util.h
├── vc4.c
├── vgem.c
├── virgl_hw.h
├── virtgpu_drm.h
└── virtio_gpu.c
1 directory, 46 files
1.2 minigbm框架结构
Minigbm的整个组织结构,可以用下面的框图来表示!
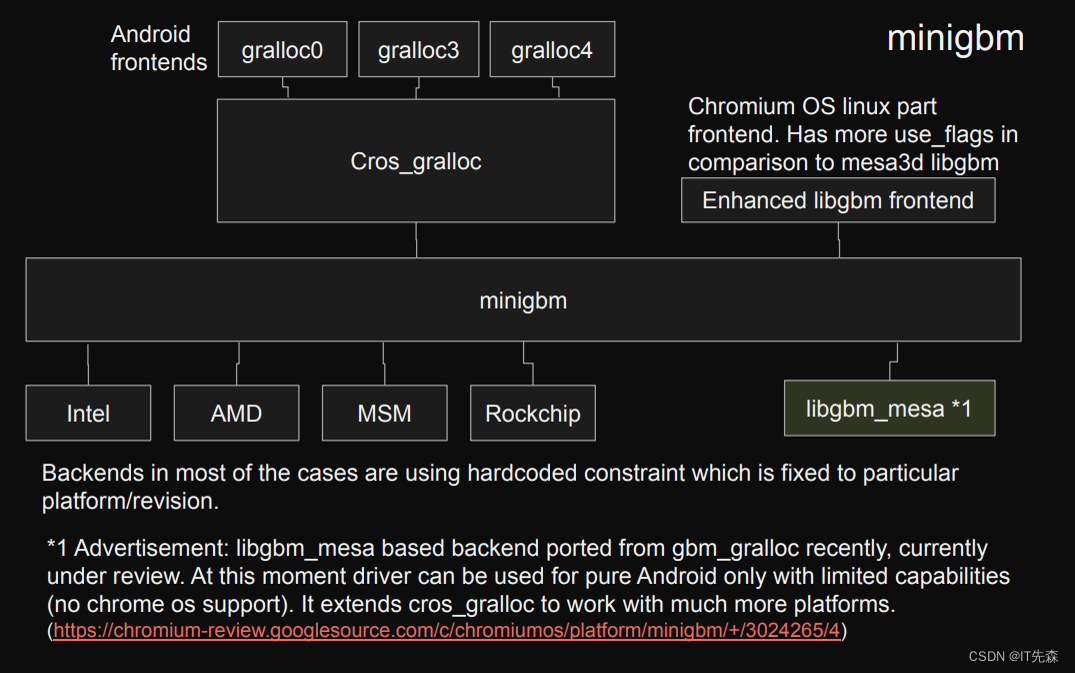
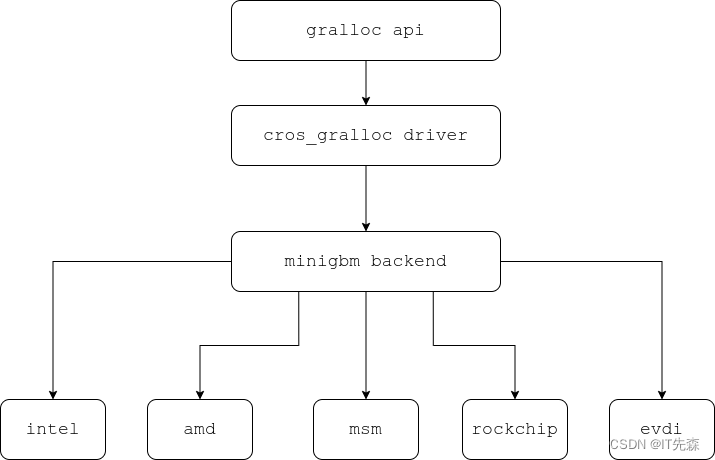
Generic Android Buffer Allocator - Linaro
二. minigbm源码分析
minig的核心主要是提供gralloc的HAL实现,但是我看它也提供了私有的HIDL service实现,关于HIDL的实现这个暂时不在我们考虑的范围之内。我们重点分析minigbm作为gralloc hal的实现的代码!
注意我这里分析的minigbm的版本如下:
commit aa65a6a67cd41390d4e8a0f87e20d3191db2994d (HEAD, tag: android-11.0.0_r46, tag: android-11.0.0_r43, tag: android-11.0.0_r40, tag: android-11.0.0_r39, tag: android-11.0.0_r38, tag: android-11.0.0_r37, tag: android-11.0.0_r36, tag: android-11.0.0_r35, tag: android-11.0.0_r34, tag: android-11.0.0_r33, tag: android-11.0.0_r32, tag: android-11.0.0_r30, tag: m/android-11.0.0_r37, aosp/android11-qpr3-s1-release, aosp/android11-qpr3-release, aosp/android11-qpr2-release, aosp/android11-qpr1-c-release)
Author: Jason Macnak <natsu@google.com>
Date: Sat Jul 25 06:02:22 2020 -0700
cros_gralloc: map custom drm fourcc back to standard fourcc
Minigbm uses a custom fourcc DRM_FORMAT_YVU420_ANDROID to
specify a DRM_FORMAT_YVU420 format with the extra Android
specific alignment requirement. Mapper should map this
custom code back into the standard one for metadata get().
Bug: b/146515640
Test: launch_cvd, open youtube video, observe no hwc warning
Change-Id: Id9ac2bb233837b6c7aa093eddbea81da0bdf3c1b
2.1 minigbm注册gralloc hal
肯定mingbm作为gralloc的hal的实现,我们肯定得重点分析了。地球人都知道HAL的实现的入口HAL_MODULE_INFO_SYM,我们来看看minigbm是怎么实现的:
//cros_gralloc/gralloc0/gralloc0.cc
struct gralloc0_module {
gralloc_module_t base;
std::unique_ptr<alloc_device_t> alloc;
std::unique_ptr<cros_gralloc_driver> driver;
bool initialized;
std::mutex initialization_mutex;
};
// clang-format off
static struct hw_module_methods_t gralloc0_module_methods = { .open = gralloc0_open };
// clang-format on
struct gralloc0_module HAL_MODULE_INFO_SYM = {
.base =
{
.common =
{
.tag = HARDWARE_MODULE_TAG,
.module_api_version = GRALLOC_MODULE_API_VERSION_0_3,
.hal_api_version = 0,
.id = GRALLOC_HARDWARE_MODULE_ID,
.name = "CrOS Gralloc",
.author = "Chrome OS",
.methods = &gralloc0_module_methods,
},
/**
* @brief
* 当其他进程分配的GraphicBuffer传递到当前进程后,需要通过该方法映射到当前进程,
* 为后续的lock做好准备
*/
.registerBuffer = gralloc0_register_buffer,
/**
* @brief
* 取消GraphicBuffer在当前进程的映射,后续不能调用lock了
*/
.unregisterBuffer = gralloc0_unregister_buffer,
/**
* @brief
* 调用lock后,才能访问图形buffer,假如usage指定了GRALLOC_USAGE_SW_* flag,
* vaddr将被填充成图形Buffer在虚拟内存中的地址
*/
.lock = gralloc0_lock,
.unlock = gralloc0_unlock,
.perform = gralloc0_perform,
.lock_ycbcr = gralloc0_lock_ycbcr,
.lockAsync = gralloc0_lock_async,
.unlockAsync = gralloc0_unlock_async,
.lockAsync_ycbcr = gralloc0_lock_async_ycbcr,
.validateBufferSize = NULL,
.getTransportSize = NULL,
},
/**
* @brief
* 是不是这个地方感觉有点奇怪,咋alloc的实现为null
* 好戏在后头
*/
.alloc = nullptr,
.driver = nullptr,
.initialized = false,
};
2.2 minigbm下HAL hw_module open函数实现
没有啥文字可以描述的,我们直接上源码!
static int gralloc0_open(const struct hw_module_t *mod, const char *name, struct hw_device_t **dev)
{
auto const_module = reinterpret_cast<const struct gralloc0_module *>(mod);
auto module = const_cast<struct gralloc0_module *>(const_module);
if (module->initialized) {
*dev = &module->alloc->common;
return 0;
}
/**
* @brief Construct a new if object
* libhardware/include/hardware/gralloc.h
* #define GRALLOC_HARDWARE_GPU0 "gpu0"
*/
if (strcmp(name, GRALLOC_HARDWARE_GPU0)) {
drv_log("Incorrect device name - %s.\n", name);
return -EINVAL;
}
if (gralloc0_init(module, true))
return -ENODEV;
*dev = &module->alloc->common;
return 0;
}
我们接着看下核心的函数gralloc0_init的实现,不能停,一口气炫下去:
//cros_gralloc/cros_gralloc_driver.h
class cros_gralloc_driver
{
public:
cros_gralloc_driver();
~cros_gralloc_driver();
int32_t init();
bool is_supported(const struct cros_gralloc_buffer_descriptor *descriptor);
int32_t allocate(const struct cros_gralloc_buffer_descriptor *descriptor,
buffer_handle_t *out_handle);
int32_t retain(buffer_handle_t handle);
int32_t release(buffer_handle_t handle);
int32_t lock(buffer_handle_t handle, int32_t acquire_fence, bool close_acquire_fence,
const struct rectangle *rect, uint32_t map_flags,
uint8_t *addr[DRV_MAX_PLANES]);
int32_t unlock(buffer_handle_t handle, int32_t *release_fence);
int32_t invalidate(buffer_handle_t handle);
int32_t flush(buffer_handle_t handle, int32_t *release_fence);
int32_t get_backing_store(buffer_handle_t handle, uint64_t *out_store);
int32_t resource_info(buffer_handle_t handle, uint32_t strides[DRV_MAX_PLANES],
uint32_t offsets[DRV_MAX_PLANES]);
int32_t get_reserved_region(buffer_handle_t handle, void **reserved_region_addr,
uint64_t *reserved_region_size);
uint32_t get_resolved_drm_format(uint32_t drm_format, uint64_t usage);
void for_each_handle(const std::function<void(cros_gralloc_handle_t)> &function);
private:
cros_gralloc_driver(cros_gralloc_driver const &);
cros_gralloc_driver operator=(cros_gralloc_driver const &);
cros_gralloc_buffer *get_buffer(cros_gralloc_handle_t hnd);
struct driver *drv_;
std::mutex mutex_;
std::unordered_map<uint32_t, cros_gralloc_buffer *> buffers_;
std::unordered_map<cros_gralloc_handle_t, std::pair<cros_gralloc_buffer *, int32_t>>
handles_;
};
//cros_gralloc/gralloc0/gralloc0.cc
static int gralloc0_init(struct gralloc0_module *mod, bool initialize_alloc)
{
std::lock_guard<std::mutex> lock(mod->initialization_mutex);
if (mod->initialized)
return 0;
mod->driver = std::make_unique<cros_gralloc_driver>();
/**
* @brief
* 根据vendor,初始化不同驱动模型,实现在cros_gralloc_driver.cc里面
* 如果要扩展的话,就得实现phy自己的逻辑
*/
if (mod->driver->init()) {
drv_log("Failed to initialize driver.\n");
return -ENODEV;
}
if (initialize_alloc) {
mod->alloc = std::make_unique<alloc_device_t>();
/**
* @brief
* alloc在此处被赋值
**/
mod->alloc->alloc = gralloc0_alloc;
mod->alloc->free = gralloc0_free;
mod->alloc->common.tag = HARDWARE_DEVICE_TAG;
mod->alloc->common.version = 0;
mod->alloc->common.module = (hw_module_t *)mod;
mod->alloc->common.close = gralloc0_close;
}
mod->initialized = true;
return 0;
}
2.3 cros_gralloc_driver的init实现
我们接着看下cros_gralloc_driver的init是如何被初始的:
//cros_gralloc/cros_gralloc_driver.cc
int32_t cros_gralloc_driver::init()
{
/*
* Create a driver from rendernode while filtering out
* the specified undesired driver.
*
* TODO(gsingh): Enable render nodes on udl/evdi.
*/
int fd;
drmVersionPtr version;
char const *str = "%s/renderD%d";
const char *undesired[2] = { "vgem", nullptr };
uint32_t num_nodes = 63;
uint32_t min_node = 128;
uint32_t max_node = (min_node + num_nodes);
for (uint32_t i = 0; i < ARRAY_SIZE(undesired); i++) {
for (uint32_t j = min_node; j < max_node; j++) {
char *node;
/**
* @brief
* 打开/dev/dri/renderD0-renderD128
*/
if (asprintf(&node, str, DRM_DIR_NAME, j) < 0)
continue;
fd = open(node, O_RDWR, 0);
free(node);
if (fd < 0)
continue;
version = drmGetVersion(fd);
if (!version) {
close(fd);
continue;
}
if (undesired[i] && !strcmp(version->name, undesired[i])) {
close(fd);
drmFreeVersion(version);
continue;
}
drmFreeVersion(version);
/**
* @brief
* 加载不同的driver
*/
drv_ = drv_create(fd);
if (drv_)
return 0;
close(fd);
}
}
return -ENODEV;
}
我们接着玩下看drv_create的实现,这个是根绝实际驱动情况,决定backend后端:
//drv.c
struct driver *drv_create(int fd)
{
struct driver *drv;
int ret;
drv = (struct driver *)calloc(1, sizeof(*drv));
if (!drv)
return NULL;
drv->fd = fd;
/**
* @brief
* 获取不同的后端,譬如i915,amdgpu,msm等
* 或者阔以构建一个通用的backend,譬如xxx后端,但是是根据drm的驱动名称进行匹配的,
* 所以那怕是通用的,也需要进行相关的扩展
*/
drv->backend = drv_get_backend(fd);
if (!drv->backend)
goto free_driver;
if (pthread_mutex_init(&drv->driver_lock, NULL))
goto free_driver;
//drmHashCreate这个API不知道是用来干啥的
drv->buffer_table = drmHashCreate();
if (!drv->buffer_table)
goto free_lock;
drv->mappings = drv_array_init(sizeof(struct mapping));
if (!drv->mappings)
goto free_buffer_table;
drv->combos = drv_array_init(sizeof(struct combination));
if (!drv->combos)
goto free_mappings;
if (drv->backend->init) {
ret = drv->backend->init(drv);
if (ret) {
drv_array_destroy(drv->combos);
goto free_mappings;
}
}
return drv;
free_mappings:
drv_array_destroy(drv->mappings);
free_buffer_table:
drmHashDestroy(drv->buffer_table);
free_lock:
pthread_mutex_destroy(&drv->driver_lock);
free_driver:
free(drv);
return NULL;
}
2.4 minigbm的backend以及backend的初始化
这里的backend,我把它理解它为minigbm对各种gpu抽象出来的一种能力的统称。因为前端就是gralloc hal的接口定义,都是一致的,然后后端backend抽象出来,然后根据实际的情况,调用具体的gpu用户层接口实现!我们来看backend是如何抽象和初始化的。
#ifdef DRV_AMDGPU
extern const struct backend backend_amdgpu;
#endif
/**
* @brief
* 可扩展虚拟显示接口(EVDI)
*/
extern const struct backend backend_evdi;
#ifdef DRV_EXYNOS
extern const struct backend backend_exynos;
#endif
#ifdef DRV_I915
extern const struct backend backend_i915;
#endif
#ifdef DRV_MARVELL
extern const struct backend backend_marvell;
#endif
#ifdef DRV_MEDIATEK
extern const struct backend backend_mediatek;
#endif
#ifdef DRV_MESON
extern const struct backend backend_meson;
#endif
#ifdef DRV_MSM
extern const struct backend backend_msm;
#endif
extern const struct backend backend_nouveau;
#ifdef DRV_RADEON
extern const struct backend backend_radeon;
#endif
#ifdef DRV_ROCKCHIP
extern const struct backend backend_rockchip;
#endif
#ifdef DRV_SYNAPTICS
extern const struct backend backend_synaptics;
#endif
#ifdef DRV_TEGRA
extern const struct backend backend_tegra;
#endif
extern const struct backend backend_udl;
#ifdef DRV_VC4
extern const struct backend backend_vc4;
#endif
extern const struct backend backend_vgem;
extern const struct backend backend_virtio_gpu;
static const struct backend *drv_get_backend(int fd)
{
drmVersionPtr drm_version;
unsigned int i;
drm_version = drmGetVersion(fd);
if (!drm_version)
return NULL;
/**
* @brief
* 后面如果要扩展,则是在backend_list中
* 添加backend_phy
*/
const struct backend *backend_list[] = {
#ifdef DRV_AMDGPU
&backend_amdgpu,
#endif
&backend_evdi,
#ifdef DRV_EXYNOS
&backend_exynos,
#endif
#ifdef DRV_I915
&backend_i915,
#endif
#ifdef DRV_MARVELL
&backend_marvell,
#endif
#ifdef DRV_MEDIATEK
&backend_mediatek,
#endif
#ifdef DRV_MESON
&backend_meson,
#endif
#ifdef DRV_MSM
&backend_msm,
#endif
&backend_nouveau,
#ifdef DRV_RADEON
&backend_radeon,
#endif
#ifdef DRV_ROCKCHIP
&backend_rockchip,
#endif
#ifdef DRV_SYNAPTICS
&backend_synaptics,
#endif
#ifdef DRV_TEGRA
&backend_tegra,
#endif
&backend_udl,
#ifdef DRV_VC4
&backend_vc4,
#endif
&backend_vgem, &backend_virtio_gpu,
};
for (i = 0; i < ARRAY_SIZE(backend_list); i++) {
const struct backend *b = backend_list[i];
// Exactly one of the main create functions must be defined.
assert((b->bo_create != NULL) ^ (b->bo_create_from_metadata != NULL));
// Either both or neither must be implemented.
assert((b->bo_compute_metadata != NULL) == (b->bo_create_from_metadata != NULL));
// Both can't be defined, but it's okay for neither to be (i.e. only bo_create).
assert((b->bo_create_with_modifiers == NULL) ||
(b->bo_create_from_metadata == NULL));
if (!strcmp(drm_version->name, b->name)) {
drmFreeVersion(drm_version);
return b;
}
}
drmFreeVersion(drm_version);
return NULL;
}
这里我们可以看到这里抽象出来了几种典型的GPU的backend,然后再根据前面获取到的drm的驱动名称进行匹配,匹配到了则返回合适的backend,没有则返回NULL。这里我们以evdi为例子来进行相关的分析。我么来看evdi backend的init。
//helpers.c
int drv_modify_linear_combinations(struct driver *drv)
{
/*
* All current drivers can scanout linear XRGB8888/ARGB8888 as a primary
* plane and as a cursor.
*/
drv_modify_combination(drv, DRM_FORMAT_XRGB8888, &LINEAR_METADATA,
BO_USE_CURSOR | BO_USE_SCANOUT);
drv_modify_combination(drv, DRM_FORMAT_ARGB8888, &LINEAR_METADATA,
BO_USE_CURSOR | BO_USE_SCANOUT);
return 0;
}
static const uint32_t render_target_formats[] = { DRM_FORMAT_ARGB8888, DRM_FORMAT_XRGB8888 };
static int evdi_init(struct driver *drv)
{
/**
* @brief Construct a new drv add combinations object
* add default render_target_formats
*/
drv_add_combinations(drv, render_target_formats, ARRAY_SIZE(render_target_formats),
&LINEAR_METADATA, BO_USE_RENDER_MASK);
return drv_modify_linear_combinations(drv);
}
const struct backend backend_evdi = {
.name = "evdi",
.init = evdi_init,
.bo_create = drv_dumb_bo_create,
.bo_destroy = drv_dumb_bo_destroy,
.bo_import = drv_prime_bo_import,
.bo_map = drv_dumb_bo_map,
.bo_unmap = drv_bo_munmap,
};
到这里gralloc hal也注册OK了,cross_gralloc_driver和backend也构建初始化OK了,后面就是上层通过grallc api来进行相关调用了。我们接着继续往下看。
2.5 minigbm的graloc hal下alloc的实现
Android通过alloc开构建GraphicBuffer,我们来看看minigbm是如何实现的。
static int gralloc0_alloc(alloc_device_t *dev, int w, int h, int format, int usage,
buffer_handle_t *handle, int *stride)
{
int32_t ret;
bool supported;
struct cros_gralloc_buffer_descriptor descriptor;
auto mod = (struct gralloc0_module const *)dev->common.module;
descriptor.width = w;
descriptor.height = h;
descriptor.droid_format = format;
descriptor.droid_usage = usage;
descriptor.drm_format = cros_gralloc_convert_format(format);
descriptor.use_flags = gralloc0_convert_usage(usage);
descriptor.reserved_region_size = 0;
/**
* @brief
* judge driver is support descriptor or not
*/
supported = mod->driver->is_supported(&descriptor);
if (!supported && (usage & GRALLOC_USAGE_HW_COMPOSER)) {
descriptor.use_flags &= ~BO_USE_SCANOUT;
supported = mod->driver->is_supported(&descriptor);
}
if (!supported && (usage & GRALLOC_USAGE_HW_VIDEO_ENCODER) &&
!gralloc0_droid_yuv_format(format)) {
// Unmask BO_USE_HW_VIDEO_ENCODER in the case of non-yuv formats
// because they are not input to a hw encoder but used as an
// intermediate format (e.g. camera).
descriptor.use_flags &= ~BO_USE_HW_VIDEO_ENCODER;
supported = mod->driver->is_supported(&descriptor);
}
if (!supported) {
drv_log("Unsupported combination -- HAL format: %u, HAL usage: %u, "
"drv_format: %4.4s, use_flags: %llu\n",
format, usage, reinterpret_cast<char *>(&descriptor.drm_format),
static_cast<unsigned long long>(descriptor.use_flags));
return -EINVAL;
}
ret = mod->driver->allocate(&descriptor, handle);
if (ret)
return ret;
auto hnd = cros_gralloc_convert_handle(*handle);
*stride = hnd->pixel_stride;
return 0;
}
这块我们先从整体概括下该部分的核心逻辑:
- 判断是否支持申请buffer的format
- 如支持则通过driver的allocate申请buffer
- 然后将申请的buffer返回
我们接着往下看driver是如何allocate的:
//cros_gralloc/cros_gralloc_driver.cc
int32_t cros_gralloc_driver::allocate(const struct cros_gralloc_buffer_descriptor *descriptor,
buffer_handle_t *out_handle)
{
uint32_t id;
size_t num_planes;
size_t num_fds;
size_t num_ints;
size_t num_bytes;
uint32_t resolved_format;
uint32_t bytes_per_pixel;
uint64_t use_flags;
int32_t reserved_region_fd;
char *name;
struct bo *bo;
struct cros_gralloc_handle *hnd;
resolved_format = drv_resolve_format(drv_, descriptor->drm_format, descriptor->use_flags);
use_flags = descriptor->use_flags;
/*
* TODO(b/79682290): ARC++ assumes NV12 is always linear and doesn't
* send modifiers across Wayland protocol, so we or in the
* BO_USE_LINEAR flag here. We need to fix ARC++ to allocate and work
* with tiled buffers.
*/
if (resolved_format == DRM_FORMAT_NV12)
use_flags |= BO_USE_LINEAR;
/*
* This unmask is a backup in the case DRM_FORMAT_FLEX_IMPLEMENTATION_DEFINED is resolved
* to non-YUV formats.
*/
if (descriptor->drm_format == DRM_FORMAT_FLEX_IMPLEMENTATION_DEFINED &&
(resolved_format == DRM_FORMAT_XBGR8888 || resolved_format == DRM_FORMAT_ABGR8888)) {
use_flags &= ~BO_USE_HW_VIDEO_ENCODER;
}
/**
* @brief
* construct struct bo
*/
bo = drv_bo_create(drv_, descriptor->width, descriptor->height, resolved_format, use_flags);
if (!bo) {
drv_log("Failed to create bo.\n");
return -ENOMEM;
}
/*
* If there is a desire for more than one kernel buffer, this can be
* removed once the ArcCodec and Wayland service have the ability to
* send more than one fd. GL/Vulkan drivers may also have to modified.
*/
if (drv_num_buffers_per_bo(bo) != 1) {
drv_bo_destroy(bo);
drv_log("Can only support one buffer per bo.\n");
return -EINVAL;
}
num_planes = drv_bo_get_num_planes(bo);
num_fds = num_planes;
if (descriptor->reserved_region_size > 0) {
reserved_region_fd =
create_reserved_region(descriptor->name, descriptor->reserved_region_size);
if (reserved_region_fd < 0) {
drv_bo_destroy(bo);
return reserved_region_fd;
}
num_fds += 1;
} else {
reserved_region_fd = -1;
}
num_bytes = sizeof(struct cros_gralloc_handle);
num_bytes += (descriptor->name.size() + 1);
/*
* Ensure that the total number of bytes is a multiple of sizeof(int) as
* native_handle_clone() copies data based on hnd->base.numInts.
*/
num_bytes = ALIGN(num_bytes, sizeof(int));
num_ints = num_bytes - sizeof(native_handle_t) - num_fds;
/*
* malloc is used as handles are ultimetly destroyed via free in
* native_handle_delete().
*/
hnd = static_cast<struct cros_gralloc_handle *>(malloc(num_bytes));
hnd->base.version = sizeof(hnd->base);
hnd->base.numFds = num_fds;
hnd->base.numInts = num_ints;
hnd->num_planes = num_planes;
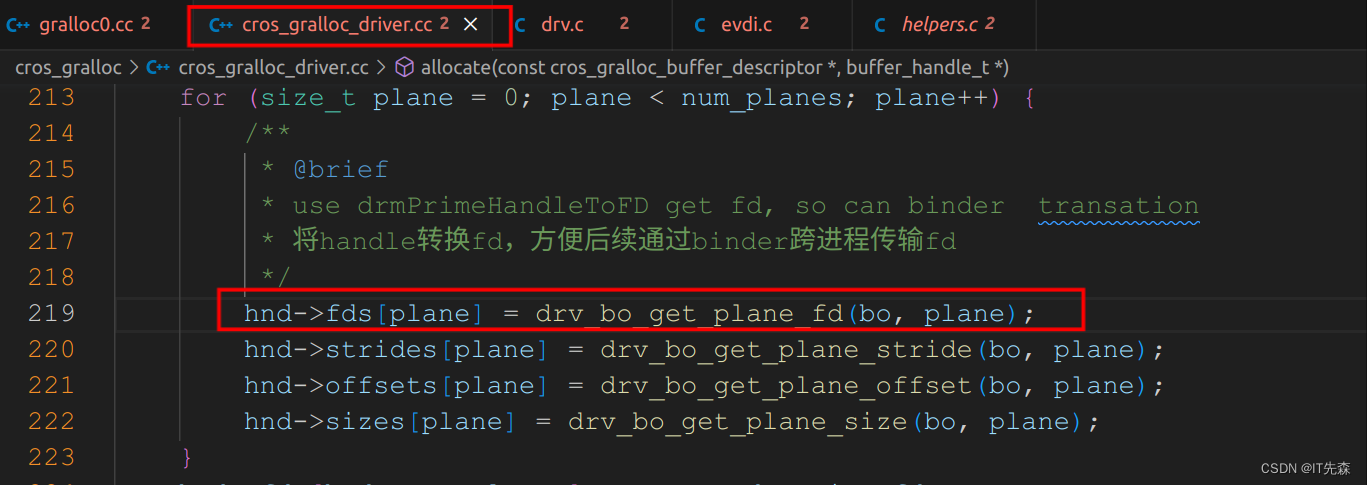
for (size_t plane = 0; plane < num_planes; plane++) {
/**
* @brief
* use drmPrimeHandleToFD get fd, so can binder transation
* 将handle转换fd,方便后续通过binder跨进程传输fd
*/
hnd->fds[plane] = drv_bo_get_plane_fd(bo, plane);
hnd->strides[plane] = drv_bo_get_plane_stride(bo, plane);
hnd->offsets[plane] = drv_bo_get_plane_offset(bo, plane);
hnd->sizes[plane] = drv_bo_get_plane_size(bo, plane);
}
hnd->fds[hnd->num_planes] = reserved_region_fd;
hnd->reserved_region_size = descriptor->reserved_region_size;
static std::atomic<uint32_t> next_buffer_id{ 1 };
hnd->id = next_buffer_id++;
hnd->width = drv_bo_get_width(bo);
hnd->height = drv_bo_get_height(bo);
hnd->format = drv_bo_get_format(bo);
hnd->format_modifier = drv_bo_get_plane_format_modifier(bo, 0);
hnd->use_flags = descriptor->use_flags;
bytes_per_pixel = drv_bytes_per_pixel_from_format(hnd->format, 0);
hnd->pixel_stride = DIV_ROUND_UP(hnd->strides[0], bytes_per_pixel);
hnd->magic = cros_gralloc_magic;
hnd->droid_format = descriptor->droid_format;
hnd->usage = descriptor->droid_usage;
hnd->total_size = descriptor->reserved_region_size + bo->meta.total_size;
hnd->name_offset = handle_data_size;
name = (char *)(&hnd->base.data[hnd->name_offset]);
snprintf(name, descriptor->name.size() + 1, "%s", descriptor->name.c_str());
id = drv_bo_get_plane_handle(bo, 0).u32;
/**
* @brief
* new class cros_gralloc_buffer
*/
auto buffer = new cros_gralloc_buffer(id, bo, hnd, hnd->fds[hnd->num_planes],
hnd->reserved_region_size);
std::lock_guard<std::mutex> lock(mutex_);
buffers_.emplace(id, buffer);
handles_.emplace(hnd, std::make_pair(buffer, 1));
/**
* @brief
* return buffer_handle_t
*/
*out_handle = reinterpret_cast<buffer_handle_t>(hnd);
return 0;
}
代码量比较多,但是我们是有原则的,不能啥都啃,不然咋下嘴不是。上面的代码核心逻辑主要为:
- 构建struct bo对象
- 然后通过博对象,填充cros_gralloc_handle
- 然后继续将前面构建出来的相关对象填充cros_gralloc_buffer
- 然后将buffer和handle以一定的结构保存
我们对前面的分开展开,继续分析,先看drv_bo_create的实现:
//drv.c
struct bo *drv_bo_create(struct driver *drv, uint32_t width, uint32_t height, uint32_t format,
uint64_t use_flags)
{
int ret;
size_t plane;
struct bo *bo;
bool is_test_alloc;
is_test_alloc = use_flags & BO_USE_TEST_ALLOC;
use_flags &= ~BO_USE_TEST_ALLOC;
/**
* @brief
* new struct bo
*/
bo = drv_bo_new(drv, width, height, format, use_flags, is_test_alloc);
if (!bo)
return NULL;
ret = -EINVAL;
if (drv->backend->bo_compute_metadata) {
ret = drv->backend->bo_compute_metadata(bo, width, height, format, use_flags, NULL,
0);
if (!is_test_alloc && ret == 0)
ret = drv->backend->bo_create_from_metadata(bo);
} else if (!is_test_alloc) {
/**
* @brief
* use backend bo_create
*/
ret = drv->backend->bo_create(bo, width, height, format, use_flags);
}
if (ret) {
free(bo);
return NULL;
}
pthread_mutex_lock(&drv->driver_lock);
for (plane = 0; plane < bo->meta.num_planes; plane++) {
if (plane > 0)
assert(bo->meta.offsets[plane] >= bo->meta.offsets[plane - 1]);
drv_increment_reference_count(drv, bo, plane);
}
pthread_mutex_unlock(&drv->driver_lock);
return bo;
}
上面代码的核心逻辑主要是通过backend的bo_create函数继续填充struct bo,战斗还没有完,我们接着继续往下看:
bo_create
drv_dumb_bo_create()
drv_dumb_bo_create_ex()
// helpers.c
int drv_dumb_bo_create_ex(struct bo *bo, uint32_t width, uint32_t height, uint32_t format,
uint64_t use_flags, uint64_t quirks)
{
int ret;
size_t plane;
uint32_t aligned_width, aligned_height;
struct drm_mode_create_dumb create_dumb;
aligned_width = width;
aligned_height = height;
switch (format) {
case DRM_FORMAT_R16:
/* HAL_PIXEL_FORMAT_Y16 requires that the buffer's width be 16 pixel
* aligned. See hardware/interfaces/graphics/common/1.0/types.hal. */
aligned_width = ALIGN(width, 16);
break;
case DRM_FORMAT_YVU420_ANDROID:
/* HAL_PIXEL_FORMAT_YV12 requires that the buffer's height not
* be aligned. Update 'height' so that drv_bo_from_format below
* uses the non-aligned height. */
height = bo->meta.height;
/* Align width to 32 pixels, so chroma strides are 16 bytes as
* Android requires. */
aligned_width = ALIGN(width, 32);
/* Adjust the height to include room for chroma planes. */
aligned_height = 3 * DIV_ROUND_UP(height, 2);
break;
case DRM_FORMAT_YVU420:
case DRM_FORMAT_NV12:
case DRM_FORMAT_NV21:
/* Adjust the height to include room for chroma planes */
aligned_height = 3 * DIV_ROUND_UP(height, 2);
break;
default:
break;
}
memset(&create_dumb, 0, sizeof(create_dumb));
if (quirks & BO_QUIRK_DUMB32BPP) {
aligned_width =
DIV_ROUND_UP(aligned_width * layout_from_format(format)->bytes_per_pixel[0], 4);
create_dumb.bpp = 32;
} else {
create_dumb.bpp = layout_from_format(format)->bytes_per_pixel[0] * 8;
}
create_dumb.width = aligned_width;
create_dumb.height = aligned_height;
create_dumb.flags = 0;
ret = drmIoctl(bo->drv->fd, DRM_IOCTL_MODE_CREATE_DUMB, &create_dumb);
if (ret) {
drv_log("DRM_IOCTL_MODE_CREATE_DUMB failed (%d, %d)\n", bo->drv->fd, errno);
return -errno;
}
drv_bo_from_format(bo, create_dumb.pitch, height, format);
/**
* @brief
* store obj_gem handle
*/
for (plane = 0; plane < bo->meta.num_planes; plane++)
bo->handles[plane].u32 = create_dumb.handle;
bo->meta.total_size = create_dumb.size;
return 0;
}
对于libdrm比较熟悉的小伙伴来说,上面就比较简单了通过ioctl的DRM_IOCTL_MODE_CREATE_DUMB指令,申请构建GEM buffer。我们知道gem_obj的handle是不同跨进程传输的,必须转换成fd才行,这个是在那个地方执行的呢?
//drv.c
int drv_bo_get_plane_fd(struct bo *bo, size_t plane)
{
int ret, fd;
assert(plane < bo->meta.num_planes);
if (bo->is_test_buffer) {
return -EINVAL;
}
/**
* @brief
* handle是每个gem context拥有的,不能跨进程传输。要跨进程传输可以将handle和fd联系起来。
* fd可以跨进程传输,android大部分buffer都是通过binder传递fd,所以这里调用drmPrimeHandleToFD
* 将gem_obj的句柄handle转换成fd以便于传输
*/
ret = drmPrimeHandleToFD(bo->drv->fd, bo->handles[plane].u32, DRM_CLOEXEC | DRM_RDWR, &fd);
// Older DRM implementations blocked DRM_RDWR, but gave a read/write mapping anyways
if (ret)
ret = drmPrimeHandleToFD(bo->drv->fd, bo->handles[plane].u32, DRM_CLOEXEC, &fd);
return (ret) ? ret : fd;
}
到这里基allocate的流程就基本就结尾了,其核心逻辑用伪代码表示就是
drmIoctl(bo->drv->fd, DRM_IOCTL_MODE_CREATE_DUMB, &create_dumb)
drmPrimeHandleToFD
2.6 minigbm的graloc hal下import的实现
我们知道当进程通过sf申请到GraphicBuffer之后,并不能立马使用必须通过import映射到申请的进程才行,这里我们看看底下import是如何实现的。我们通过前面gralloc的hal注册可知,registerBuffer指向了gralloc0_register_buffer,所以我们只需要看它的实现逻辑即可:
//cros_gralloc/gralloc0/gralloc0.cc
gralloc0_register_buffer()
mod->driver->retain(handle)
int32_t cros_gralloc_driver::retain(buffer_handle_t handle)
{
uint32_t id;
std::lock_guard<std::mutex> lock(mutex_);
auto hnd = cros_gralloc_convert_handle(handle);
if (!hnd) {
drv_log("Invalid handle.\n");
return -EINVAL;
}
auto buffer = get_buffer(hnd);
if (buffer) {
handles_[hnd].second++;
buffer->increase_refcount();
return 0;
}
/**
* @brief Construct a new if object
* https://juejin.cn/post/7184685220158210107
* 从fd导入bo
* gem都是通过handle去查找一个bo,要通过fd转换成一个bo,首先要将fd转换成handle。drm提供了
* drmPrimeFDToHandle 接口,获得fd 对应的handle。
* 对应的handle 转fd函数是drmPrimeHandleToFD
*/
if (drmPrimeFDToHandle(drv_get_fd(drv_), hnd->fds[0], &id)) {
drv_log("drmPrimeFDToHandle failed.\n");
return -errno;
}
/**
* @brief
*
*/
if (buffers_.count(id)) {
buffer = buffers_[id];
buffer->increase_refcount();
} else {
struct bo *bo;
struct drv_import_fd_data data;
data.format = hnd->format;
data.width = hnd->width;
data.height = hnd->height;
data.use_flags = hnd->use_flags;
memcpy(data.fds, hnd->fds, sizeof(data.fds));
memcpy(data.strides, hnd->strides, sizeof(data.strides));
memcpy(data.offsets, hnd->offsets, sizeof(data.offsets));
for (uint32_t plane = 0; plane < DRV_MAX_PLANES; plane++) {
data.format_modifiers[plane] = hnd->format_modifier;
}
/**
* @brief
* It's not going to be this way.
* DRM_IOCTL_PRIME_FD_TO_HANDLE
*/
bo = drv_bo_import(drv_, &data);
if (!bo)
return -EFAULT;
id = drv_bo_get_plane_handle(bo, 0).u32;
buffer = new cros_gralloc_buffer(id, bo, nullptr, hnd->fds[hnd->num_planes],
hnd->reserved_region_size);
buffers_.emplace(id, buffer);
}
handles_.emplace(hnd, std::make_pair(buffer, 1));
return 0;
}
这块的逻辑比较简单,就是取出前面aallocate中构建的buffer,看是否存在存在取出,没有则继续后续逻辑。
2.7 minigbm的graloc hal下lock的实现
当我们上层创建出来的GraphicBuffer被创建出来后,在正式被使用前还必须要lock锁定这块,才能被正式使用,我们看看mingi是如何实现的。
.lockAsync = gralloc0_lock_async
lock = gralloc0_lock
module->lockAsync
gralloc0_lock_async
auto hnd = cros_gralloc_convert_handle(handle)
map_flags = gralloc0_convert_map_usage(usage)
mod->driver->lock()
cros_gralloc_driver::lock
hnd = cros_gralloc_convert_handle(handle)
auto buffer = get_buffer(hnd)
buffer->lock()//cros_gralloc_buffer::lock
这里我们展开来看下cros_gralloc_buffer::lock的实现:
//cros_gralloc/cros_gralloc_buffer.cc
int32_t cros_gralloc_buffer::lock(const struct rectangle *rect, uint32_t map_flags,
uint8_t *addr[DRV_MAX_PLANES])
{
void *vaddr = nullptr;
memset(addr, 0, DRV_MAX_PLANES * sizeof(*addr));
/*
* Gralloc consumers don't support more than one kernel buffer per buffer object yet, so
* just use the first kernel buffer.
*/
if (drv_num_buffers_per_bo(bo_) != 1) {
drv_log("Can only support one buffer per bo.\n");
return -EINVAL;
}
if (map_flags) {
if (lock_data_[0]) {
drv_bo_invalidate(bo_, lock_data_[0]);
vaddr = lock_data_[0]->vma->addr;
} else {
struct rectangle r = *rect;
if (!r.width && !r.height && !r.x && !r.y) {
/*
* Android IMapper.hal: An accessRegion of all-zeros means the
* entire buffer.
*/
r.width = drv_bo_get_width(bo_);
r.height = drv_bo_get_height(bo_);
}
vaddr = drv_bo_map(bo_, &r, map_flags, &lock_data_[0], 0);
}
if (vaddr == MAP_FAILED) {
drv_log("Mapping failed.\n");
return -EFAULT;
}
}
for (uint32_t plane = 0; plane < num_planes_; plane++)
addr[plane] = static_cast<uint8_t *>(vaddr) + drv_bo_get_plane_offset(bo_, plane);
lockcount_++;
return 0;
}
里面核心的逻辑就是drv_bo_map,我们看看他的逻辑是什么:
.bo_map = drv_dumb_bo_map,
//drv.c
addr = bo->drv->backend->bo_map(bo, mapping.vma, plane, map_flags)
//helpers.c
void *drv_dumb_bo_map(struct bo *bo, struct vma *vma, size_t plane, uint32_t map_flags)
{
int ret;
size_t i;
struct drm_mode_map_dumb map_dumb;
memset(&map_dumb, 0, sizeof(map_dumb));
map_dumb.handle = bo->handles[plane].u32;
/**
* @brief
* map kerne space to user space
*/
ret = drmIoctl(bo->drv->fd, DRM_IOCTL_MODE_MAP_DUMB, &map_dumb);
if (ret) {
drv_log("DRM_IOCTL_MODE_MAP_DUMB failed\n");
return MAP_FAILED;
}
for (i = 0; i < bo->meta.num_planes; i++)
if (bo->handles[i].u32 == bo->handles[plane].u32)
vma->length += bo->meta.sizes[i];
return mmap(0, vma->length, drv_get_prot(map_flags), MAP_SHARED, bo->drv->fd,
map_dumb.offset);
}
三.总结
通过前面的分析,我们可以知道minigbm将libdrm的操作剥离出Mesa架构,然后调用libdrm的用户层接口申请dumb buffer,然后封装成GraphicBuffer给上层使用。关于DRM入门的知识重点推荐何小龙大神的DRM(Direct Rendering Manager)学习简介。好了今天的博客Android minigbm框架普法就到这里了。总之,青山不改绿水长流先到这里了。如果本博客对你有所帮助,麻烦关注或者点个赞,如果觉得很烂也可以踩一脚!谢谢各位了!!