参考:
Failed to build tree: parent link [base_link] of joint
在古月居gazebo 的基础教程里,运行古月居的mbot的launch文件报错,小机器人不出现。
主要原因是提供的xacro文件的宏定义没有放在xacro的命名空间。
解决:
将<mbot_base_gazebo>改为<xacro:mbot_base_gazebo>

Failed to build tree: parent link [base_link] of joint [lidar_joint] not found
news2026/2/12 10:38:35
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1479490.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

ROS 2基础概念#2:节点(Node)| ROS 2学习笔记
ROS 2节点简介
节点是执行计算的进程。节点组合在一起形成一个图(graph),并使用主题(topic)、服务(service)和参数服务器(paramter server)相互通信。这些节点旨在以细粒…


【三维重建】【SLAM】SplaTAM:基于3D高斯的密集RGB-D SLAM
题目:SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM 地址:spla-tam.github.io 机构:CMU(卡内基梅隆大学)、MIT(美国麻省理工) 总结:SplaTAM,一个新…

MyBatis 学习(三)之 MyBatis 全局配置文件
目录
1 MyBatis 全局配置文件
2 properties 元素
3 setting 设置
4 typeAlianses 别名处理器
5 typeHandler 类型处理器
6 objectFacotry 对象工厂(了解)
7 plugins 插件(了解)
8 environments 运行环境
9 databaseIdPro…

如何对酒店开展科学的定岗定编——以酒店健身房、娱乐房为例
近年来,随着旅游行业的快速发展,也带动了酒店业的兴盛。酒店的经营效益不仅受益于旅游业,同时也受制于旅游行业。由于旅游业存在明显的季节性差异,旅游旺季客流量多、淡季客流量少,造成人员忙闲不均的问题。酒店行业也…

怎么恢复删除的文件?6种有效的数据恢复方法汇总!
怎么才能恢复被删掉的数据啊?现在都是数字化时代了,我们的电脑里装了好多重要数据,一旦丢了,可是会给我们的工作和生活带来极大的麻烦啊。所以,学几招有效的电脑数据恢复方法是挺有必要的。下面,我就给大家…
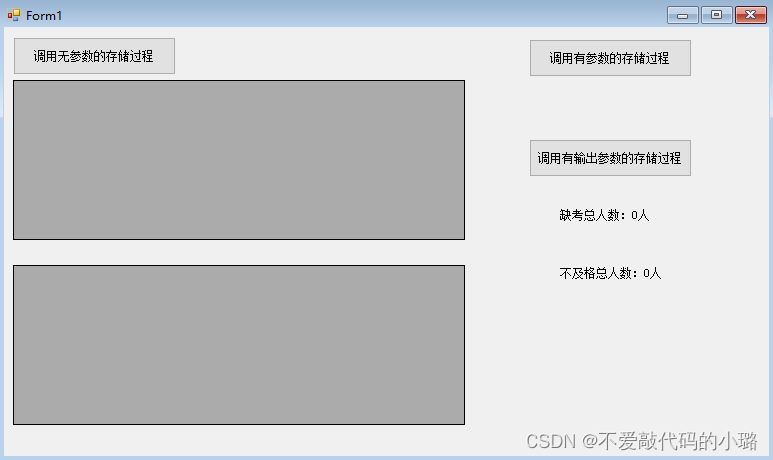
C# 高阶语法 —— Winfrom链接SQL数据库的存储过程
存储过程在应用程序端的使用的优点 1 如果sql语句直接写在客户端,以一个字符串的形式体现的,提示不友好,会导致效率降低 2 sql语句写在客户端,可以利用sql注入进行攻击,为了安全性,可以把sql封装在…

出现 ‘vue‘ 不是内部或外部命令,也不是可运行的程序 或批处理文件的解决方法(图文界面)
目录 前言1. 问题所示2. 原理分析3. 解决方法前言
由于Java转全栈,对此前端的细节点都比他人更加注意,所以此处记录更有用的信息!(小白都能看懂)
1. 问题所示
出现如下问题:
F:\vue_project>vue -version
vue 不是内部或外部命令,也不是可运行的程序
或批处理文件…
CUDA C:查看GPU设备信息
相关阅读
CUDA Chttps://blog.csdn.net/weixin_45791458/category_12530616.html?spm1001.2014.3001.5482 了解自己设备的性能是很有必要的,为此CUDA 运行时(runtime)API给用户也提供了一些查询设备信息的函数,下面的函数用于查看GPU设备的一切信息。 …

挑战30天学完Python:Day29 API开发
🎉 本系列为Python基础学习,原稿来源于 30-Days-Of-Python 英文项目,大奇主要是对其本地化翻译、逐条验证和补充,想通过30天完成正儿八经的系统化实践。此系列适合零基础同学,或仅了解Python一点知识,但又没…

如何在Node.js中使用定时器
在Node.js中使用定时器是一项常见且重要的任务,特别是在需要执行定时任务或者轮询操作的情况下。Node.js提供了多种方式来实现定时器功能,包括setTimeout、setInterval和setImmediate等方法。本篇博客将介绍如何在Node.js中使用这些定时器,并…

【STM32】STM32学习笔记-独立看门狗和窗口看门狗(47)
00. 目录 文章目录 00. 目录01. WDG概述02. 独立看门狗相关API2.1 IWDG_WriteAccessCmd2.2 IWDG_SetPrescaler2.3 IWDG_SetReload2.4 IWDG_ReloadCounter2.5 IWDG_Enable2.6 IWDG_GetFlagStatus2.7 RCC_GetFlagStatus 03. 独立看门狗接线图04. 独立看门狗程序示例105. 独立看门…

mysql缓存机制面试题,学海无涯
二、我们先来看看这份笔记到底有什么
1、先把kubernetes跑起来(先跑起来创建kubernetes集群部署应用访问应用Scale应用滚动更新) 2、重要概念 3、部署kubernetes Cluster(安装docker安装 kubelet.kubeadm和 kubectll用kubeadm 创建cluster&a…
【力扣hot100】刷题笔记Day18
前言
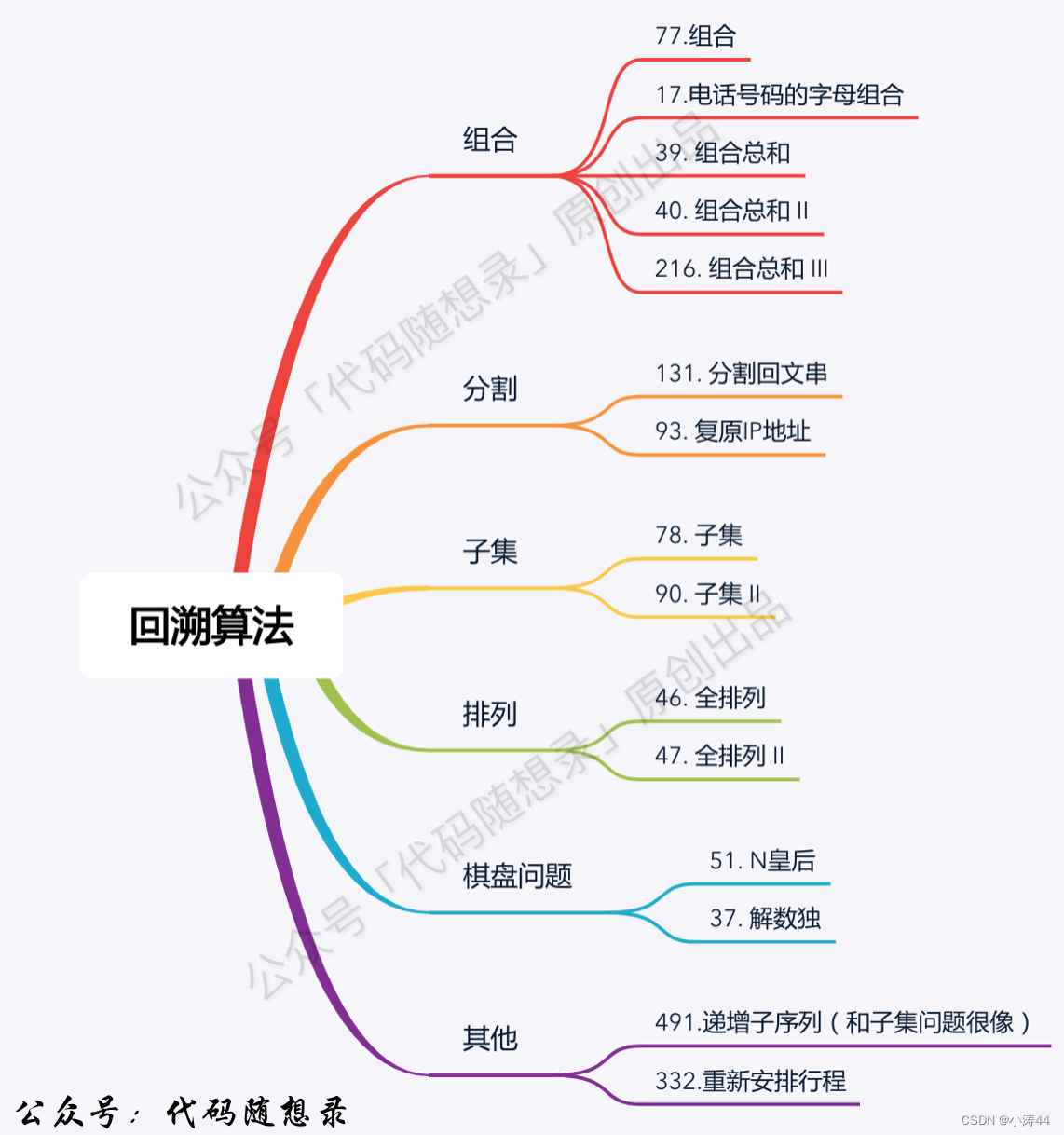
晚上巩固一下今天的回溯题,基础不牢地动山摇,po一张代码随想录总结的
组合补充
77. 组合 - 力扣(LeetCode) class Solution:def combine(self, n: int, k: int) -> List[List[int]]:path []res []def backtrack(star…

航拍无人机技术,航拍无人机方案详解,无人机摄影技术
航拍无人机是利用遥控技术和摄像设备,在空中进行拍摄和录像的无人机。这种无人机通常具有高清摄像设备、图像传输设备、GPS定位系统、智能控制系统等,可以轻松实现各种拍摄角度和高度,广泛应用于影视制作、旅游景区航拍、城市规划、环保监测等…
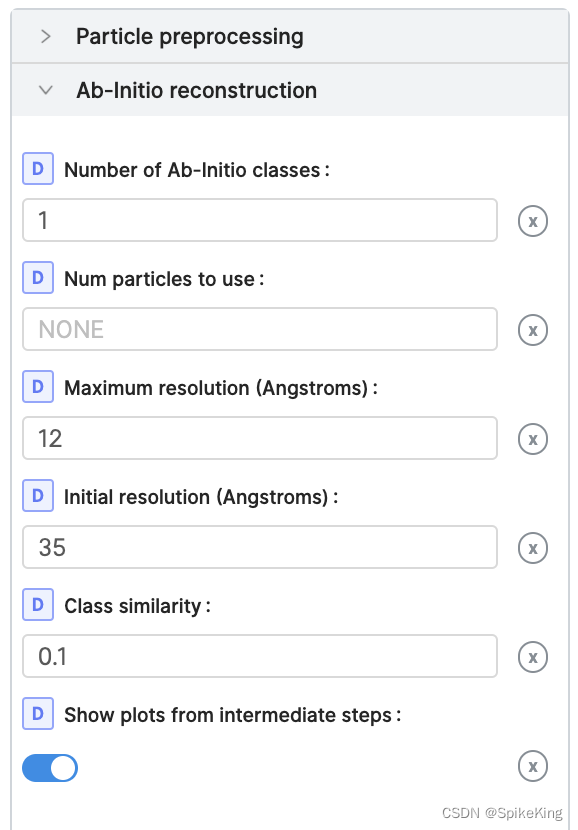
CryoEM - 使用 cryoSPARC 基于单颗粒图像从头重构蛋白质三维结构
欢迎关注我的CSDN:https://spike.blog.csdn.net/ 本文地址:https://blog.csdn.net/caroline_wendy/article/details/136384544 基于冷冻电镜单颗粒图像重构蛋白质三维结构,利用冷冻电镜技术测定生物大分子结构的方法。原理是从冷冻电镜获得大量同一种蛋白质分子的二维投影图…
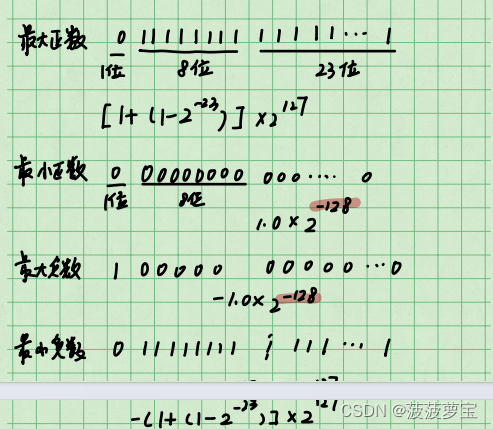
计算机组成原理-第一/二章 概述和数据的表示和运算【期末复习|考研复习】
前言 总结整理不易,希望大家点赞收藏。 给大家整理了一下计算机组成原理中的重点概念,以供大家期末复习和考研复习的时候使用。 参考资料是王道的计算机组成原理和西电的计算机组成原理。 计算机组成原理系列文章传送门: 第一/二章 概述和数据…

适用Java SpringBoot项目的分布式锁
在分布式系统中,常用到分布式锁,它有多中实现方式,如:基于redis,database,zookeeper等。Spring integration组件有这三种服务的分布式锁实现,今天来看看用的比较多的redis和database实现方式。 …
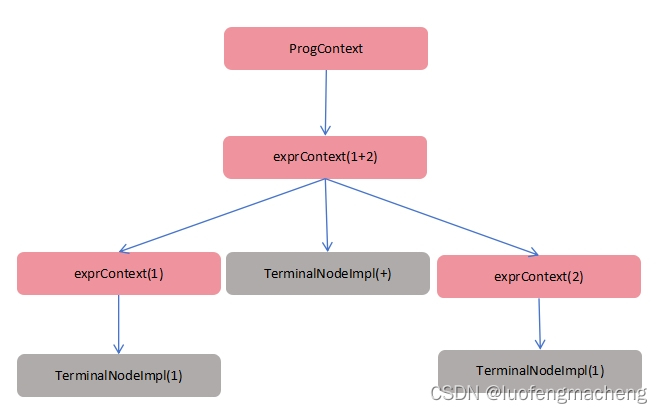
ANTLR4规则解析生成器(三):遍历语法分析树
文章目录 1 词法分析2 语法分析3 遍历语法分析树3.1 Listener3.2 Visitor 4 总结 1 词法分析
词法分析就是对给定的字符串进行分割,提取出其中的单词。
在antlr4中,词法规则的名称的首字母需要大写,右侧必须是终结符,通常将词法…