YOLOv8重磅升级!新增旋转目标检测功能,基于DOTA数据集,支持15个类别目标航拍图像检测,模型&代码均已开源~


新版亮点
- YOLOv8-OBB:YOLOv8中OBB(Oriented Bounding Box)模型的引入标志着物体检测的重要一步,特别是对于有角度或旋转的物体,提高了准确性并减少了各种应用中的背景噪声,如航空影像和文本检测
- 支持分割和增强功能:增强的分割功能提供更精确的图像分析,并将改进的分类增强功能集成到Ultralytics训练管道中
- 性能优化:自去年首次发布以来,我们一直专注于优化YOLOv8框架的各个方面,包括训练、验证、推理和导出,以确保速度和效率,而不会影响性能
- 增强型脚骨与训练特性:模型架构、训练功能和数据集支持方面的增量更新,包括与Open Images V7数据集和改进的图像分类模型的集成
- API与CLI改进:通过完善的API和CLI增强用户体验,包括用于高级数据集探索和交互的Ultralytics Explorer工具。PaddlePaddle、NCNN、PNNX、TensorRT及其他集成:加强与多个其他平台的集成,为用户提供更多部署灵活性和兼容性。
- 多样化的贡献和Ultralytics HUB的演变:230个贡献者的1000多个拉取请求的集成和Ultralytics HUB的增长,以及它自己的一系列版本更新,突出了社区在YOLOv8开发中的重要作用。
新特性试用
首先,通过如下命令安装算法库:
pip install ultralytics
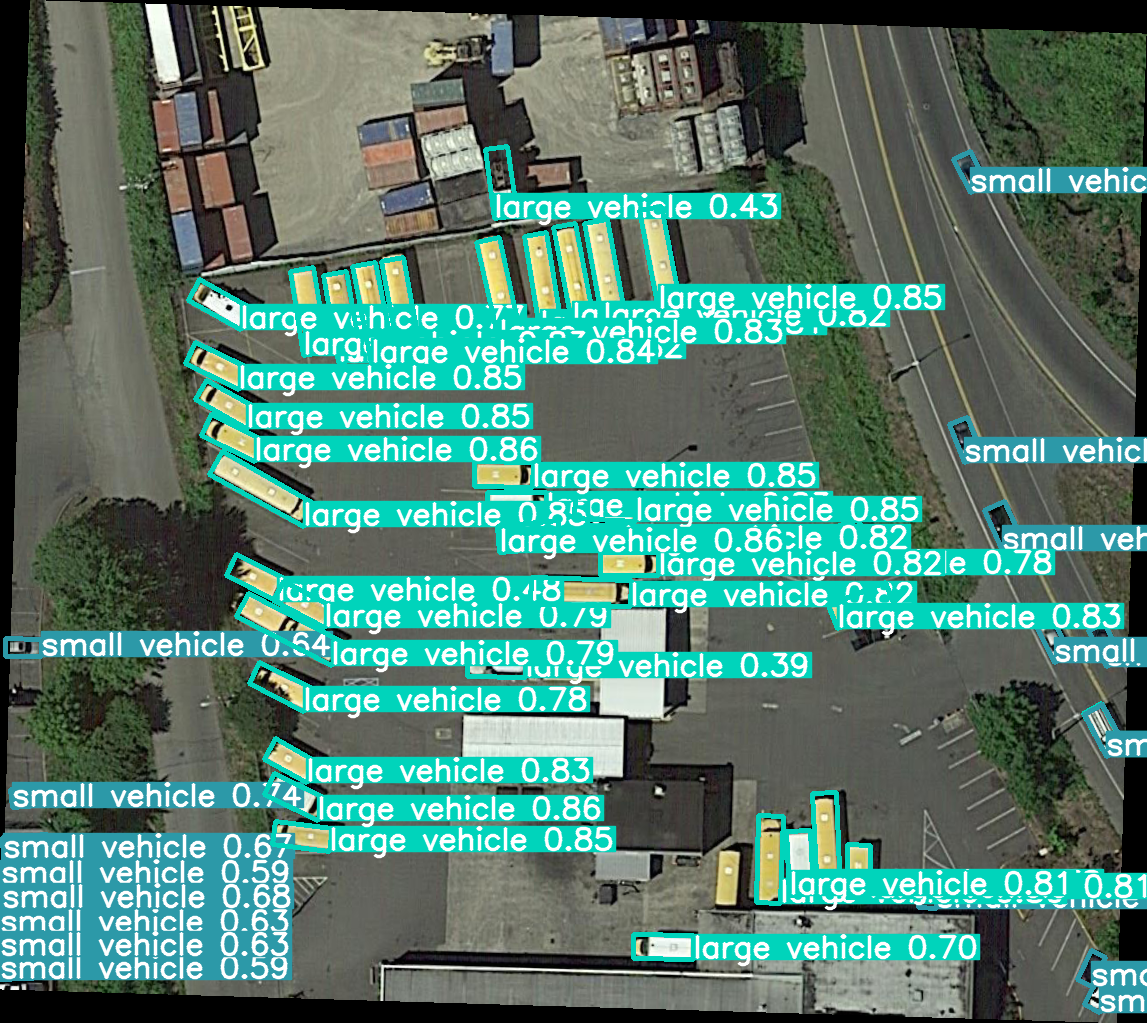
然后,照一张航拍图像将其命名为"data.png",你还需要把预训练模型下载下载放到"weights"目录下;
最后,直接直接通过CLI方式预测
yolo obb predict model='weights/yolov8n-obb.pt' source=data.png
此时,可以看到如下信息提示

根据提示就可以找到检测结果咯