文章目录
- 1.已有的环境
- 2.安装
- 2.1.首先cd进入到catkin_ws文件夹,然后输入以下命令行:
- 2.2.将turtlebot加入环境
- 2.3.选择性安装其它依赖包
- 2.4.运行turtlebot in stage [perfect]
1.已有的环境
在之前已经配置好了小乌龟的前提下,我们已经拥有了一个名叫catkin_ws的文件夹,这个也就是我们已经建立完成的一个ros的workspace,在这个前提下,我们开始建立我们的turlebot。
官方链接是:https://github.com/gaunthan/Turtlebot2-On-Melodic
下图为官方界面截图:
从这句话可以看出,我们之前建立好的catkin_ws是一个已经建立好的workspace,所以我们直接就可以在这个环境中使用,而不是去建造新的所谓的叫turtlebot_ws的workspace,
2.安装
2.1.首先cd进入到catkin_ws文件夹,然后输入以下命令行:
curl -sLf https://raw.githubusercontent.com/gaunthan/Turtlebot2-On-Melodic/master/install_basic.sh | bash
catkin_make
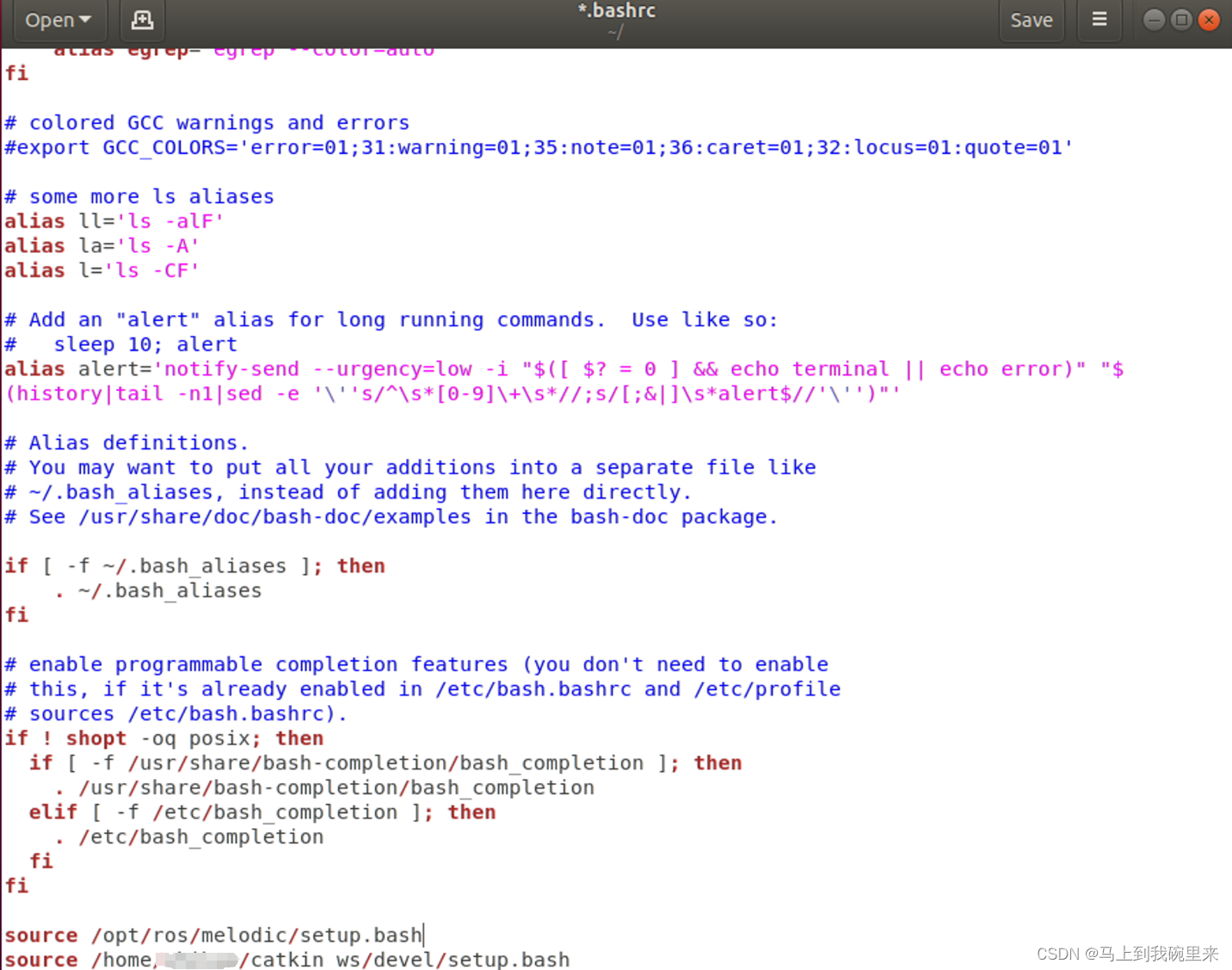
2.2.将turtlebot加入环境
echo "source /home/zhihao/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
这一步也至关重要,需要尤其理解这里面的语法,不要胡乱粘贴,每个人的路径都是不一样的,这一步操作完之后可以在以下命令中看到
sudo gedit ~/.bashrc
注意最后一行,就是刚刚添加的
2.3.选择性安装其它依赖包
sudo apt-get install ros-melodic-move-base*
sudo apt-get install ros-melodic-map-server*
sudo apt-get install ros-melodic-amcl*
sudo apt-get install ros-melodic-navigation*
2.4.运行turtlebot in stage [perfect]
roslaunch turtlebot_stage turtlebot_in_stage.launch
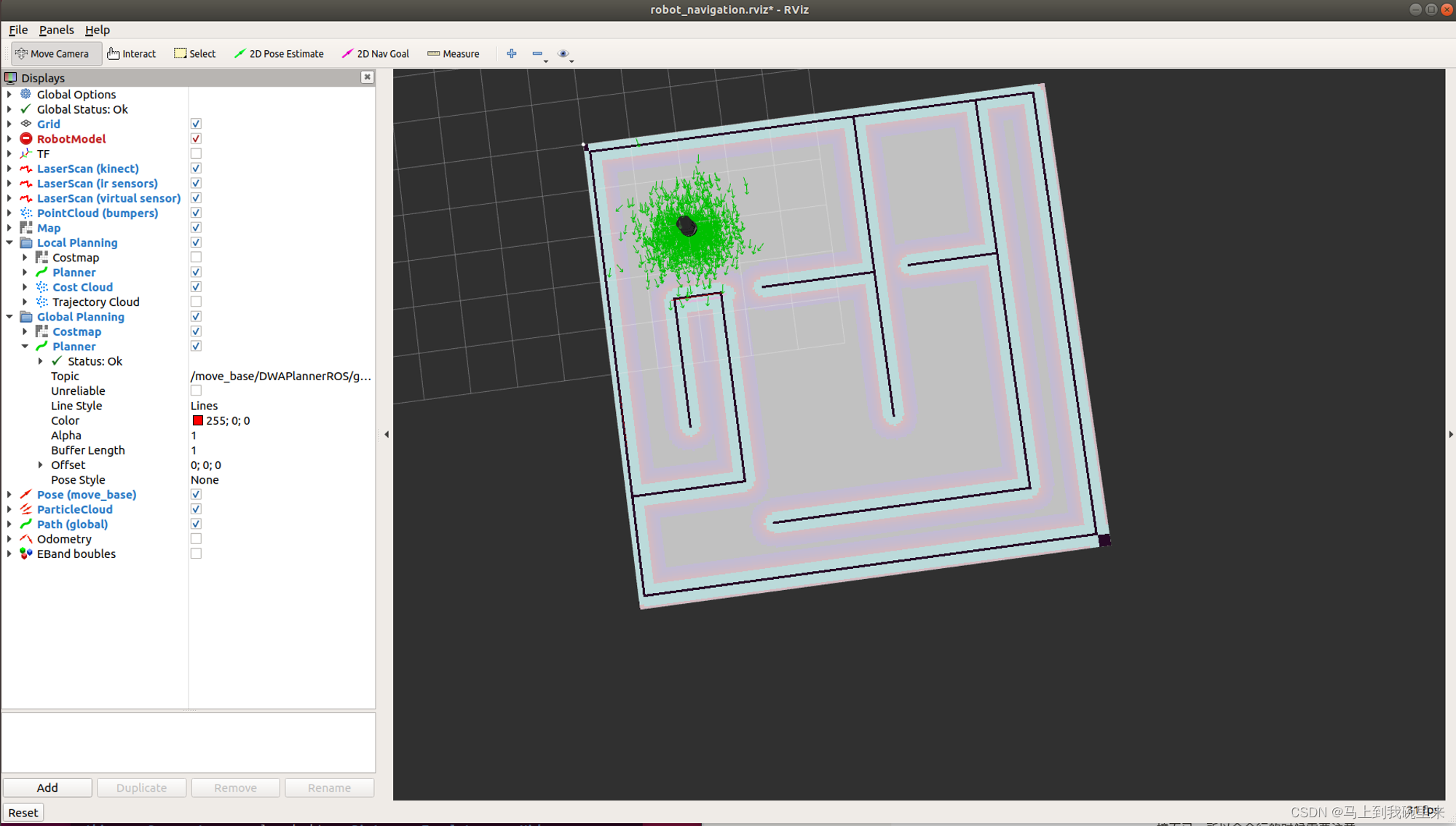
但是需要注意的是,这个项目中是有真实的机器人的,但是我们没有,所以我们只是用其中的虚拟环境而已,所以命令行的时候需要注意。



![[ECE] P2.3Determine t_P_LH and t_P_HL from the oscilloscope](https://img-blog.csdnimg.cn/direct/2d6c748baac941818c67c7447ac9a300.png)