题目:GARField: Group Anything with Radiance Fields
来源:UC Berkeley 和 Luma AI
项目: https://www.garfield.studio/
文章目录
- 摘要
- 一、前言
- 二、相关工作
- 2.1 层次分组
- 2.2 NeRF的分割
- 2.3 3D 特征场
- 三、method
- 3.1 2D Mask 生成
- 3.2 Scale-Conditioned Affinity Field(尺度条件亲和场)
- 3.2.1 对比监督
- 3.2.2 密集尺度监督
- 3.2.3 射线和掩码采样
- 3.3 实施细节
- 四、层次分解
- 五、实验
- 5.1 场景分解(定性)
- 5.2 层次结构(定量)
- 六、局限性
- 七、代码
- 总结
摘要
提示:这里可以添加本文要记录的大概内容:
分组(或者分割)本身是模糊的,因为在不同粒度级别上,场景的分割标准不同——挖掘机的车轮应该被认为是独立的还是整体的一部分?本文提出 辐射场分组 GARField,一种将三维场景,从带pose图像的输入分解为语义组的方法 。方法通过物理尺度来接受群体的模糊性:通过优化一个按尺度划分的3D密切特征场,从SAM模型提供的二维mask来优化,以从粗到细的层次结构,通过自动树构造或用户交互推导出可能分组的层次结构。
GARField能够实现 对象的集体、对象和各种子部分, 具有令人兴奋的下游应用程序,如3D资产提取或动态场景理解。
一、前言
如图1,虽然NeRFs 等技术可以恢复场景的逼真的3D重建,但世界被建模为一个没有结构意义的单一体积。作为人类,我们不仅可以重建场景,但我们也有能力组在多个层次的粒度,分类理解场景。

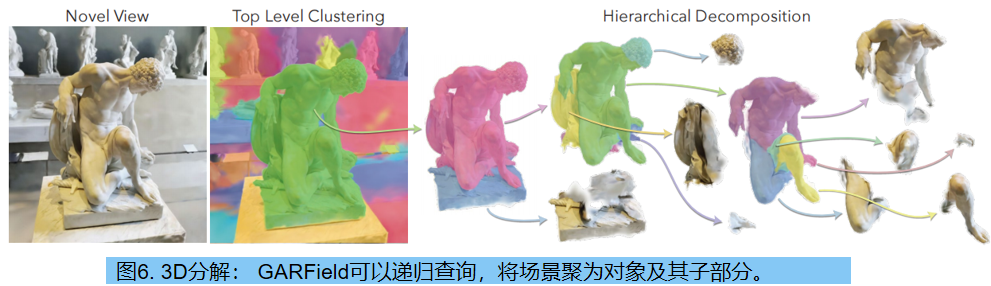
提出了GARField方法,给定姿态的图像,重建一个三维场景和一个 scale-conditioned affinity field,使将场景分解成组的层次结构。例如,GARField可以提取整个挖掘机(图1右上)以及它的子部件(右下)。 这种密集的层次3D分组使诸如3D资产提取和交互式分割等应用程序成为可能。
GARField将一组二维分割mask,提取成一个三维体积尺度条件的亲和场。因为分组是一项模糊的任务,二维标签可能是重叠或冲突的,导致了挑战。 我们通过利用一个具有尺度条件的特征域来解决问题。具体地说,GARField优化了一个密集的三维特征场,它被监督,使特征距离反映了点的亲和力。尺度调节使两点在大尺度上具有较高的亲和力,而在较小尺度上具有较低的亲和力,如图2所示 。

我们用SAM得到输入图像的候选分割mask。对于每个mask,基于场景几何计算一个物理比例,利用3D尺度来解决视图或候选掩模之间的不一致。
一个行为良好的亲和场de特点:
1)可和性,这意味着如果两个点与第三个点相互分组,它们本身应该分组在一起;2)包容,这意味着如果两个点在一个小的尺度上分组,它们应该在更高的尺度上分组在一起。
GARField使用的对比损失和抑制辅助损失鼓励了这两种特性。
二、相关工作
2.1 层次分组
从前景分割开始,二维图像的研究一直很广泛。有几种方法基于光谱聚类的思想,通过经典的纹理线索来提取轮廓,并通过一个自顶向下的[37]或自下而上的模型,用于多层次分割和更复杂的层次场景解析[1,25,31]。
许多工作通过定义一组类别来规避分组中的模糊性问题,其中的实例将被分割,即全景分割[10,14]。最近,SAM 将这种模糊性off-loads到提示中,每个像素上可以提出多个分割掩模。然而,SAM不能在场景中恢复一组一致的层次组(我们通过多尺度三维蒸馏实现)
我们的方法从2维模型中提取信息:考虑完整的场景,并专注于3D对象。
2.2 NeRF的分割
现有的NeRF中的分割方法通常通过使用地面真值语义标签[29,38],匹配实例掩码[18],或在NeRF [34]上训练三维分割网络,将分割掩模提炼成三维分割网络。但是,这些技术不考虑层次结构分组,而只对对象或实例的平面层次结构感兴趣。Ren等人[27]利用图像涂鸦的形式的人类互动来分割对象。最近,Cen等人[3]试图通过用户提示跟踪相邻视图之间的2D掩模,从SAM中恢复3D一致掩模。Chen等人[4]尝试通过将SAM编码器特征提炼成3D并查询解码器。与这些方法相比,GARField不需要用户输入;它能够自动获得场景的分层分组,而且恢复的组根据定义是视图一致的。
2.3 3D 特征场
将高维特征分解成一个神经场,与辐射场(视角相关的颜色和密度)相结合,已经被彻底探索。Semantic NeRF [38]、蒸馏特征场[16]、神经特征融合场[33]、Panoptic Lifting[29]等方法,将三维特征场优化的逐像素二维特征提炼成三维,重建体积渲染后的二维特征。这些特征可以来自预先训练好的视觉模型,如DINO或来自语义分割模型。LERF [13]将这一想法扩展到一个有尺度条件的特征领域,使其能够从像CLIP这样的全局图像嵌入中训练特征域。
GARField同样在三维空间,优化了尺度条件特征字段;然而,多尺度特征的目的是解决分组中的歧义,而不是像CLIP那样重建显式的二维特征。此外,LERF没有空间分组。上述方法都是基于对图像特征的直接监督,而其他方法,如NeRF-SOS [8]和对比Lift [2],使用基于相似性的射线对之间的对比损失,在单一尺度上优化任意特征场。GARField使用这种对比的方法,因为它允许基于掩码标签定义点之间的成对关系。然而,我们设计了一个尺度条件下的对比损失,它允许提取相互冲突的mask 到 3D。
三、method
3.1 2D Mask 生成
GARField以pose图像为输入,生成一个分层的三维场景分组,以及一个标准的三维体积辐射场和一个有尺度条件的亲和场。首先用SAM得到输入图像的候选mask。接下来, 通过输入的三维位置和欧式尺度,优化一个体积辐射场和亲和场,并输出一个特征向量。亲和度是通过比较点对的特征向量来获得的。优化后,生成的亲和字段可以用于分解场景,通过以粗到细的方式递归地聚类三维特征嵌入,或者用于分割用户指定的查询。整个管道如图3所示。
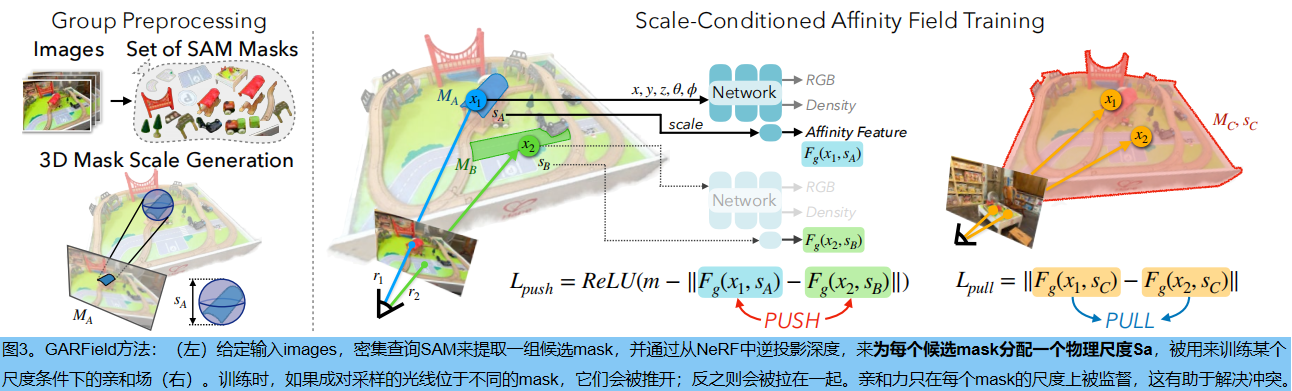
2D mask筛选:首先用SAM的自动掩码生成器,得到图像的二维mask候选对象,为每个mask分配一个3D尺度。具体的,在一个点网格中查询SAM,并在每个查询点产生3个候选分割掩码。然后,通过置信度过滤这些掩模,并删除几乎相同的掩模,以产生多个大小的候选掩模列表,可以重叠或包括彼此。这个过程是独立于视点完成的,产生的mask可能不一致。目标是生成一个基于对象的物理大小的分组层次结构。因此,我们为每个2D mask分配了一个物理三维尺度,如图3所示。为此,我们部分地训练了一个辐射场,并渲染了一个来自每个训练摄像机pose的深度图像。接下来,对于每个mask,我们考虑该掩模内的三维点,并根据这些点的位置分布的范围来选择比例。该方法保证了掩模的三维尺度存在在相同的世界空间中,实现了尺度条件下的亲和力。
3.2 Scale-Conditioned Affinity Field(尺度条件亲和场)
尺度条件是GARField的一个关键组成部分,它允许整合不一致的二维掩码候选:相同的点可能取决于所需分组的粒度。尺度条件减轻了这种不一致性,因为它解决了查询应该属于哪个组的歧义。在尺度分割条件下,同一点的冲突掩模在训练过程中不再相互对抗,而是在不同的亲和尺度下在同一场景中共存。
我们在三维点 x 和欧氏尺度 s 上定义了尺度条件亲和场 Fg(x,s)→Rd,类似于LERF [13]。输出特性被限制在一个单位超球体内,在一个尺度上两点之间的亲和性由 A(x1,x2,s)= −||Fg(x1,s)−Fg(x2,s)||2 定义。这些特征可以使用基于NeRF密度的相同渲染权重,以加权平均值进行体渲染,以获得每条射线的值。
3.2.1 对比监督
根据DrLIM [9],采用margin-based contrastive 对比目标进行监督。损失又两部分组成:给定的尺度下,同一组中的特征接近,不同组中的特征分开。
具体来说,从同一训练图像中采样掩模 MA、MB 的两条射线rA、rB,以及相应的尺度 sA和sB。我们可以沿每条射线,以体渲染方式得到尺度条件的亲和特征 FA和FB。如果MA=MB,特性将通过L2距离拉在一起: Lpull= ||FA−FB||;反之,特性将被分开: Lpush = ReLU(m−||FA−FB||),其中m是下界距离或边界。这种损失只适用于从同一图像中采样的射线,因为在不同视点上的掩模没有对应关系。
3.2.2 密集尺度监督
仅有对比损失的监督,并不足以维持尺度分层。我们引入以下修改来解决:
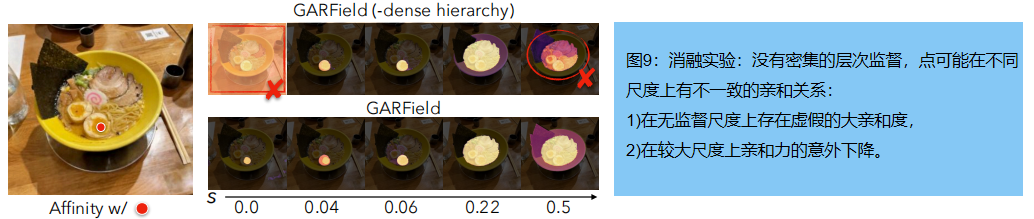
持续尺度监督。使用3D mask尺度,分组只在mask对应的离散像素点处定义。这导致了大的无监督区域,如图9顶部所示。我们通过在当前的mask尺度和第二个最小的mask尺度之间均匀随机地扩大尺度s来加强尺度监督。当射线mask是给定视点的最小mask时,我们在0和s0之间进行插值。确保了在整个领域的持续规模监督,没有留下无监督的区域
遏制辅助损失:如果两条射线 r1 和 r2 在同一个尺度为s的掩模中,那么它们也应该在任何大于s的尺度上被拉在一起。每个训练步骤中,对于以s尺度分组的光线,我们另外采样一个更大尺度的 s’>s,光线也被拉在一起。这确保了在小尺度上的亲和性在大尺度上不会失去。
3.2.3 射线和掩码采样
为平衡图像的数量和用于监督的点对的数量,每次采样16张图像,每幅图像采样256个点,每次序列迭代得到4096个样本
对于每个采样的射线,还必须选择一个mask作为训练的组标签。在每个训练步骤中,我们从每个光线对应的mask列表中随机选择一个mask。
1)选择mask的概率与掩模的二维像素面积的对数成反比,防止大尺度控制采样过程,因为可以通过更多的像素来选择更大的掩模。
2)在mask选择过程中,我们协调同一图像中光线选择的随机尺度,以增加正对的概率。为此,我们对每幅图像采样一个介于0到1之间的单个值,并以相同的值索引到每个像素的掩码概率CDF中,以确保位于同一组内的像素被分配相同的掩码。
3.3 实施细节
该方法是在Nerfacto[32]的基础上,为 grouping field 定义一个单独的输出头。 grouping field 用24层的hashgrid[23]表示,每层特征维为2,有256个神经元和ReLU激活的4层MLP表示,以scale作为额外输入。我们将相机的范围限制在2×,并使用sklearn的 quantile transform对三维mask尺度分布的MLP输入进行归一化(第3.1节)。输出嵌入件的维数为d = 256维。来自亲和特性的梯度不影响来自NeRF的RGB输出,因为这些表示不共享任何权重或梯度。
经过2000步NeRF优化后,开始训练 grouping field,给出几何时间收敛。为了加速训练,首先体渲染哈希值,然后将其作为MLP的输入,以获得射线特征。使用这种延迟渲染,可以只用一个额外的MLP调用,以不同的尺度查询相同的射线。在输入MLP之前,我们将体积呈现的结果归一化为单位范数,对于点级查询,单个哈希网格值被归一化。预处理SAM大约需要3-10分钟,然后在GTX 4090上进行大约20分钟的训练
四、层次分解
一旦优化了尺度条件的亲和力,GARField生成一个3D groups的层次结构,组织在树中,这样每个节点就被分解成潜在的子组。为了做到这一点,我们通过减少亲和力的尺度来递归地聚类组,使用HDBSCAN [19],这是一种基于密度的聚类算法,不需要先验集群的数量。
这种聚类过程,可以在二维中对生成mask的图像中的体渲染特征进行,或者在三维跨点中生成点云。
Initialization hierarchy:首先以一个大规模尺度 smax 全局集群特征(实验设置为1.0,对应于输入摄像机的位置的程度),作为场景分解中的top节点。
递归聚类:为了生成场景节点的层次树,我们迭代地减少一个固定的epsilon(我们使用0.05),在每个叶节点上运行HDBSCAN。如果HDBSCAN为给定节点返回多个集群,那么我们将这些集群添加为子集群并递归。持续到尺度0,此时过程终止,返回当前树。
五、实验
现有的三维扫描数据集,倾向于关注对象级扫描,是模拟的,或主要包含室内家庭场景[6]。为了评估GARField,我们使用了来自 Nerfstudio 和 LERF数据集的各种室内和室外场景。图3和图6提供了定性结果。
5.1 场景分解(定性)
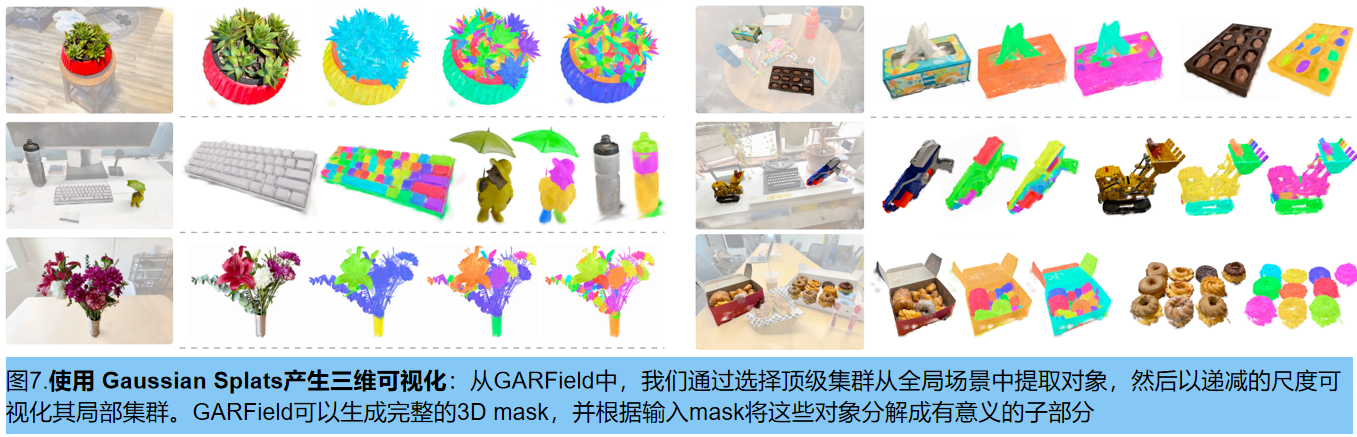
使用Gaussian Splatting [12]通过查询高斯中心的GARField亲和场来可视化分解。我们这样做是因为与nerf相比,Gaussian Splatting在3D中更容易分割。所有的渲染都是完整的3D模型,而不是2D图像视图的分割。
我们可视化了两种类型的分层聚类结果。图7以手工选择的粗尺度对场景进行全局聚类,然后从聚类中,选择对应于少数对象的组,并将它们进一步分解为子组。我们可视化了在连续递减的尺度上获得的簇,这增加了组的粒度。GARField实现高保真3d分组在广泛的场景和对象,从人造对象,如键盘,复杂的自然对象像植物,可以分组个体花以及他们的花瓣和叶子。通过改变尺度,在不同的层次上分离物体,例如花盆中的每一片叶子(左第一行)。
5.2 层次结构(定量)
使用两个指标进行定量评估:第一种测量来自多个视图中的标签的视图一致性,第二次通过mIOU对地面真实人类注释,测量各种层次mask的召回。
三维完整性:对于下游任务,组对应于完整的三维对象是很有用的,例如,包含整个对象而不是它的某一侧的组。虽然GARField总是通过构造生成与视图一致的组,但它可能不一定包含完整的对象。我们通过检查整个3D对象是否跨一系列视点组合在一起来评估其完整性。为了做到这一点,在5个场景中,选择一个3D点投影到3个不同的视点,并标记3个相应的视图一致的真实mask,包含在粗、中和精细水平的点。在这些点上,我们以0.05的增量从GARField的多个尺度上挖掘多个掩模,在每个尺度上,基于0.9的特征相似性阈值获得一个mask。我们还通过点击图像中的点并拍摄所有3个面具来与SAM进行比较。我们报告了两种方法对所有候选mask计算的最大mIOU
结果如表1所示。GARField在跨视点上比SAM生成更完整的3D掩码,从而产生具有多视图人工对象注释的更高的mIOU。这种效果在最细粒度的层面上尤其明显。
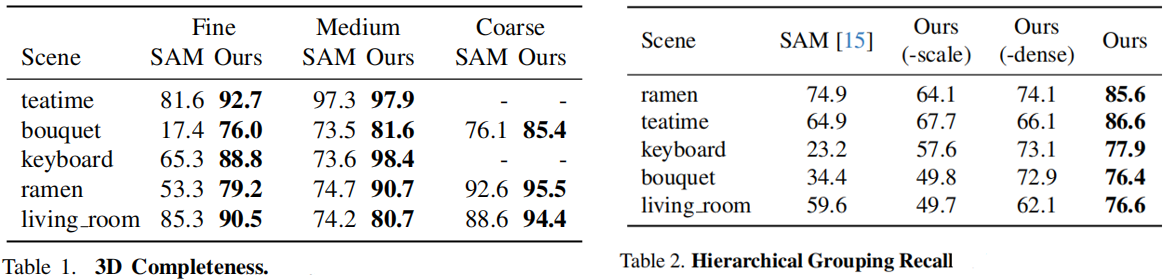
层次分组召回:测量GARField在多个粒度上的召回。在5个场景中,我们选择一个新的视点,并为1-2个对象标记多达3个Grountruth 层次组。GARField通过聚类图像空间特征,输出一组如第4节所述的mask,每个树节点输出一个mask。我们通过保留所有输出mask与SAM的自动mask生成进行了比较。我们通过两种方式删除了GARField:GARField(-尺度)删除了尺度划分;而GARField(-层次结构)删除了密集监督
消融表明,规模条件反射和规模致密化对于高质量的分组是必要的。图9显示了在单纯监督下的更高规模的亲和分解。
六、局限性
GARField的核心是从2D mask生成器中提取输出,因此如果2D mask不能包含所需的组,这将不会出现在3D中。视点不均匀的区域可能会出现人为的群体边界,例如,如果一个对象只从近距离观察,它可能永远不会被分组在一起,因为没有输入视图完整地包含它。我们使用物理大小来处理组的模糊性,但在一个尺度内可能有多个分组。例如,与容器中包含的对象可能会发生冲突,因为有该对象和没有该对象的容器可以具有相同的比例。未来的工作可以考虑其他方法来解决分组歧义,如功能支持。比例条件反射的另一个结果是,不同大小的对象部分分别从树中分支,而不是一次分支:同一个表上的多个对象可能出现在树的不同层次上。本工作中的树生成是一种单纯的贪婪算法,它可以导致更深层次的虚假的小群,如补充部分中的树所示。未来的工作可能会探索更复杂的层次集群的方法。
七、代码
d
\sqrt{d}
d
1
0.24
\frac {1}{0.24}
0.241
x
ˉ
\bar{x}
xˉ
x
^
\hat{x}
x^
x
~
\tilde{x}
x~
ϵ
\epsilon
ϵ
ϕ
\phi
ϕ
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。