一、什么是蓝牙串口透传模块的模式
蓝牙串口模块,一般都会有两个模式,即AT指令模式,以及透传模式
1、有的模块,会通过一个GPIO口来选择当前是什么模式,比如将一个IO口拉低则进入透传模式,也就是不再识别AT指令,即使收到AT指令也是直接透传给主机
2、有的模块,则是自动切换AT指令模式和透传模式。当蓝牙未连接的时候则是AT指令模式,一旦蓝牙被主机连接了,则自动进入透传模式,进入透传模式之后AT指令就不再识别,转而变成普通数据发送给主机
3、另外还有的模块,就是不用区分两种模式,AT指令在整个蓝牙模块的生命周期都是有效的,不管连接或者未连接,都是自动识别 。识别到AT指令则是当做命令去处理,非AT指令则是当作普通数据去处理,比如:KT6368A双模蓝牙芯片就是这么处理的
这样做的坏处是,加入透传的数据里面也有符合规则的AT指令,就会被当做AT指令处理了,不再透传给上位机了。
二、蓝牙模块的串口波特率
主流的蓝牙模块,基本都是串口接口,也就是UART接口。但是也不排除有其他的接口,比如IIC、SPI等等,这类型的接口产品非常的少
1、主流的还是串口,这样比较容易被广大的工程师群体所接受
蓝牙模块的串口AT指令,也是基于早期的电话控制协议改写来的,也就是说它生来并不是标配,也不是标准。而是在广大的工程师群体使用过程中,最后大家慢慢的达成了默契,形成了共识性的标准而已
- 所以才会是今天看到的百花齐放的样子,采用串口通讯,AT指令设置参数。比如AT指令设置蓝牙名称,AT指令设置串口的波特率等等 。还有更高级的比如蓝牙模块不需要设置波特率,他是自动识别的
- 这里拿KT6368A双模蓝牙芯片的串口部分来举例说明,串口的规则是怎么样的
通讯标准:115200 bps --- 用户可以通过串口指令设置详见3.2
数据位 :8 停止位 :1 校验位 :none 流控制 :none
注意:所有的指令的设计,都是有规律的,不是随意划分的,可以对照下面找一下规律
控制指令格式:AT+<CMD>[<param>]\r\n ---- 所有的都是字符,不是十六进制数
数据反馈格式:<IND>[<param>]\r\n
数据反馈格式:<IND>[<param>]\r\n
AT+ : 控制指令是控制主机给KT6368A的控制命令,以“AT+ ”开始
<CMD> :后面紧跟<CMD>控制 ,通常是2个字符
[<param>] :如果CMD后面有参数,则紧跟着[<param>]
\r\n :最后以\r\n结束,字符型换行,windows就是回车键。十六进制0x0D,0x0A
<IND> :数据反馈是蓝牙把各种状态和数据信息反馈给主机,以<IND>作为开头
AT指令的举例如下:

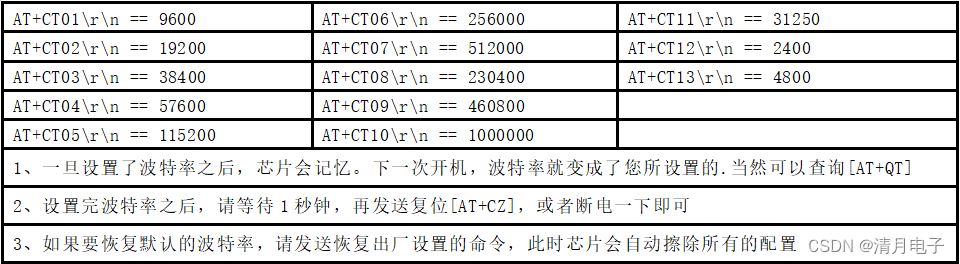
- 这当然一般的蓝牙模块都可以使用AT指令去修改波特率,这样就可以更好的兼容到任何产品里面去,但是一般的产品大部分都是9600或者38400,再或者115200
很少的应用场景需要超高的波特率,所以KT6368A的芯片就定义默认为115200
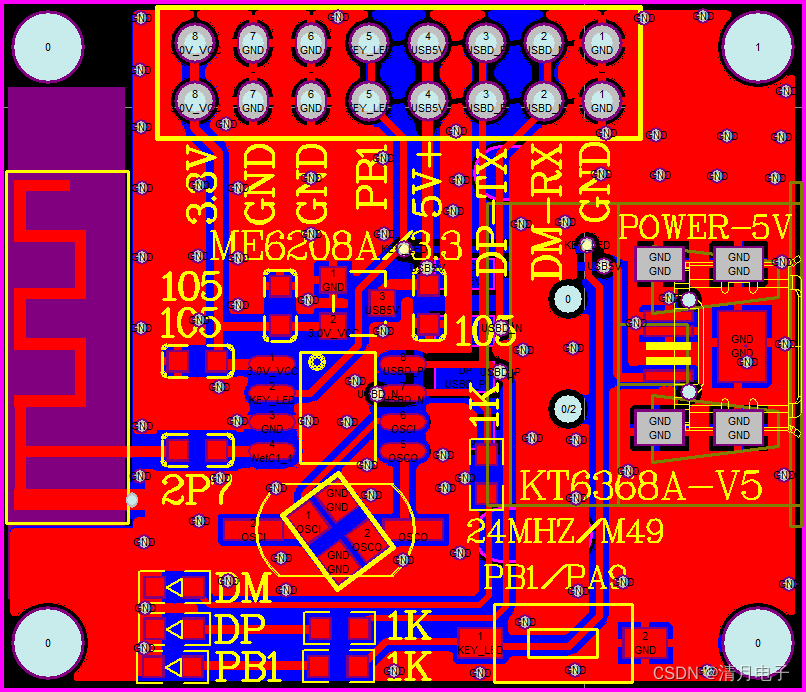
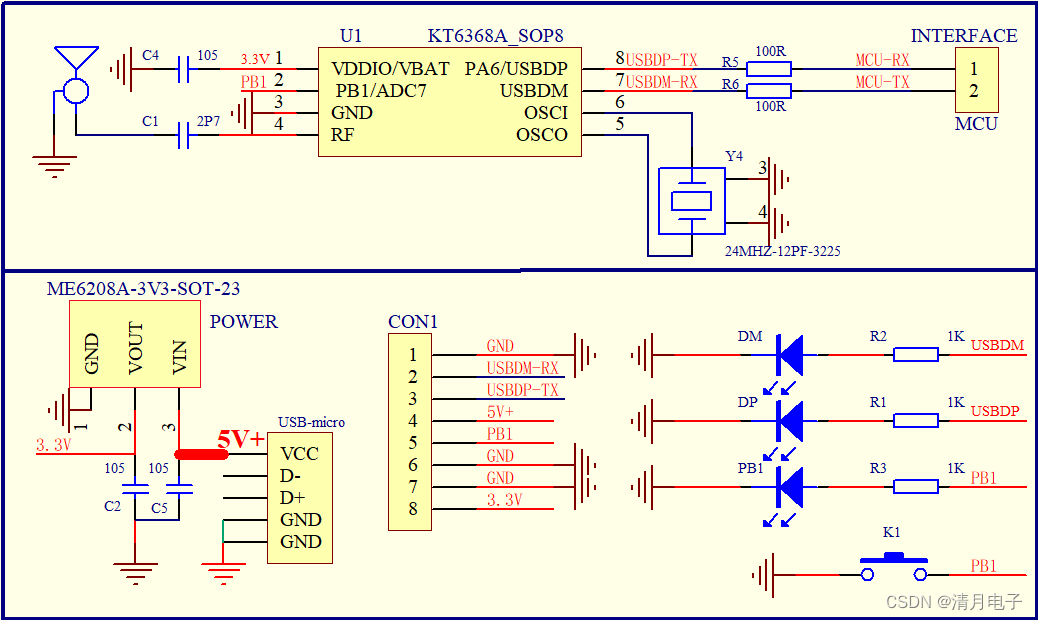
5、蓝牙测试模块的设计参考如下:包含PCB和原理图