Ray Tracing
Why Ray Tracing
- 光栅化不能得到很好的全局光照效果
- 软阴影
- 光线弹射超过一次(间接光照)
- 光栅化是一个快速的近似,但是质量较低

- 光线追踪是准确的,但是较慢
- Rasterization: real-time, ray tracing: offline
- 生成一帧需要一万CPU小时
Basic Ray-Tracing Algorithm
- 图形学上的光线定义
- 光线是沿直线传播的
- 两个或多个光线不会发生碰撞
- 光线一定会从光源出发到达我们的眼镜
- light reciprocity 光路的可逆性
Pinhole Camera Model
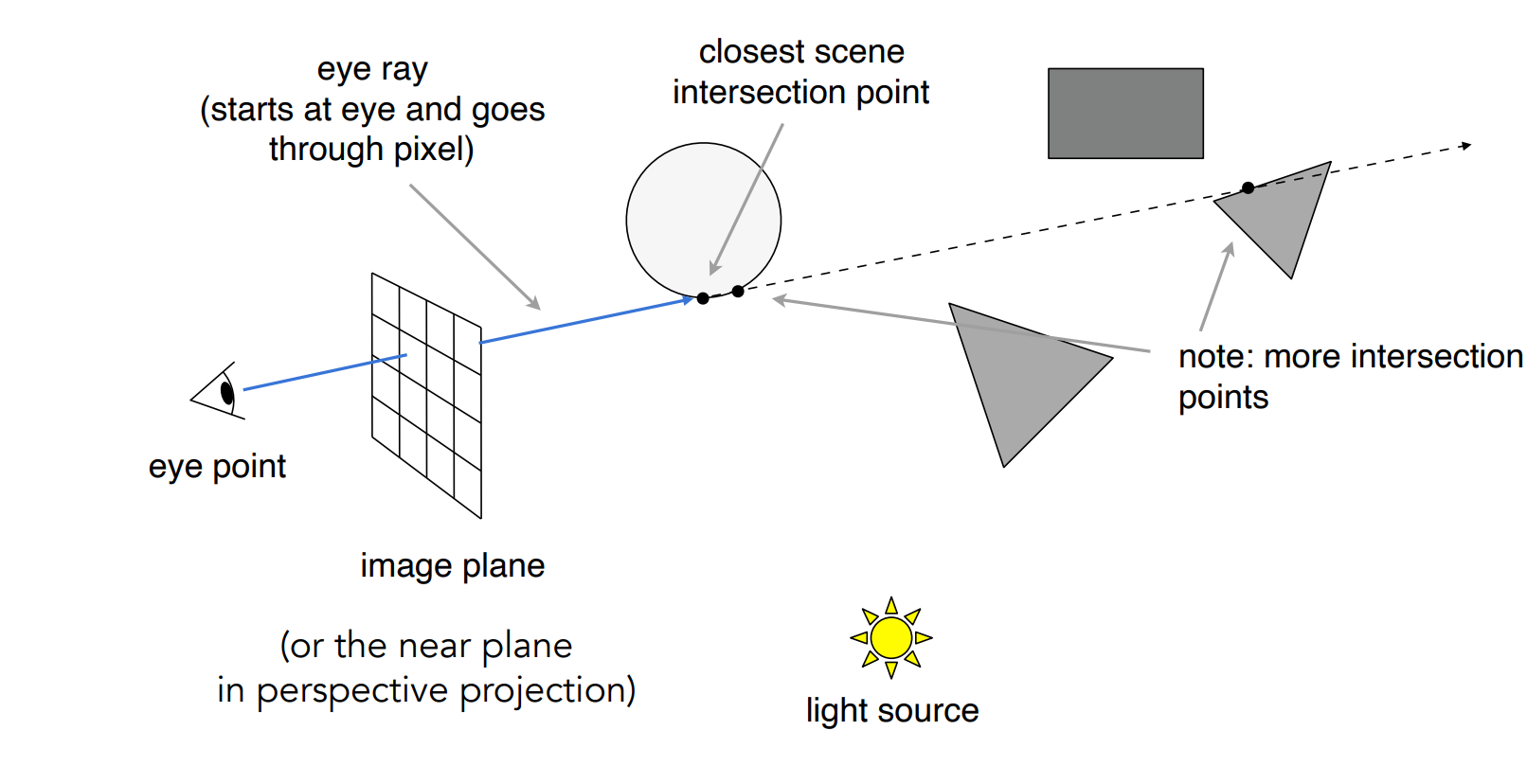
- 对于每一个像素,从眼睛投射出一个光线(eye ray)
- 和场景相交,求最近的交点
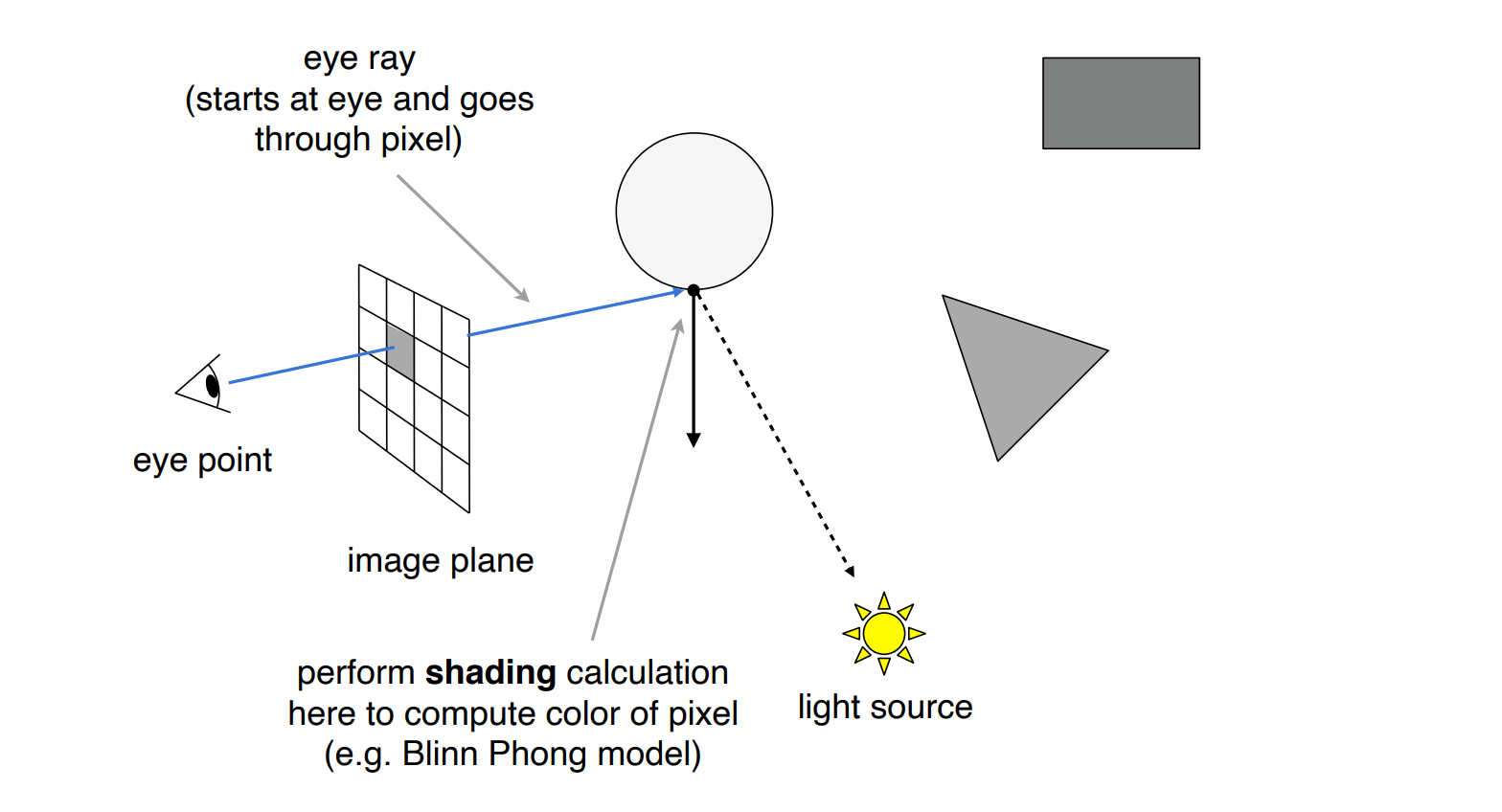
- 和光源连线判断是否对光源可见
- 计算着色,写回像素的值
以上算法还是只考虑了光线只弹射一次的情况
Recursive (Whitted-Style) Ray Tracing
- 在任意一个点可以继续传播光线(反射和折射)
- 所有点的着色都会被加到像素中(需要计算能量损失)


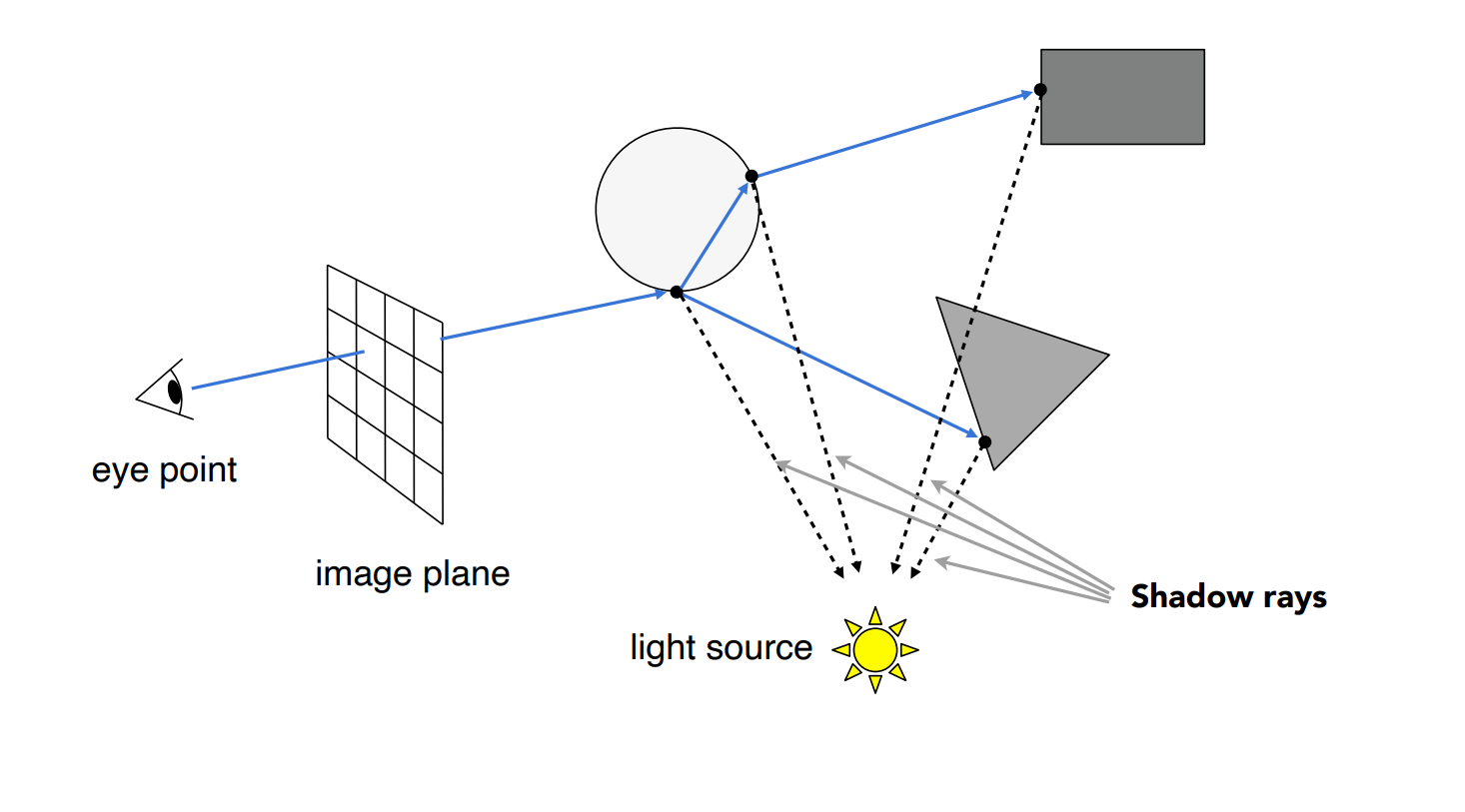
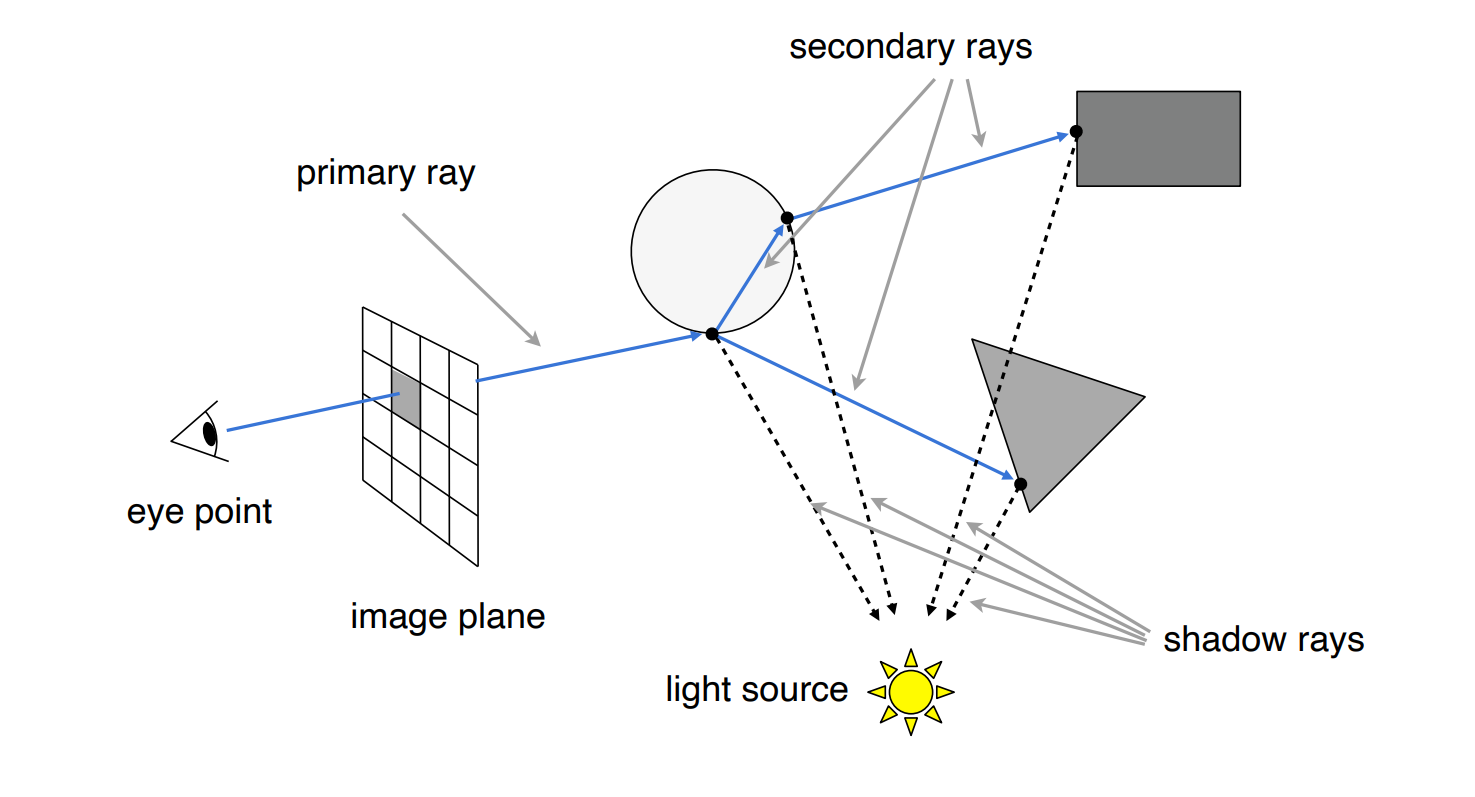
- 对于从眼睛出发的光线定义为 Primary Ray
- 由 Primary Ray 折射和反射的光线可以称作 Secondary Ray
- 判断可见性的光路被称作 Shadow Ray
Ray-Surface Intersection
Ray Equation
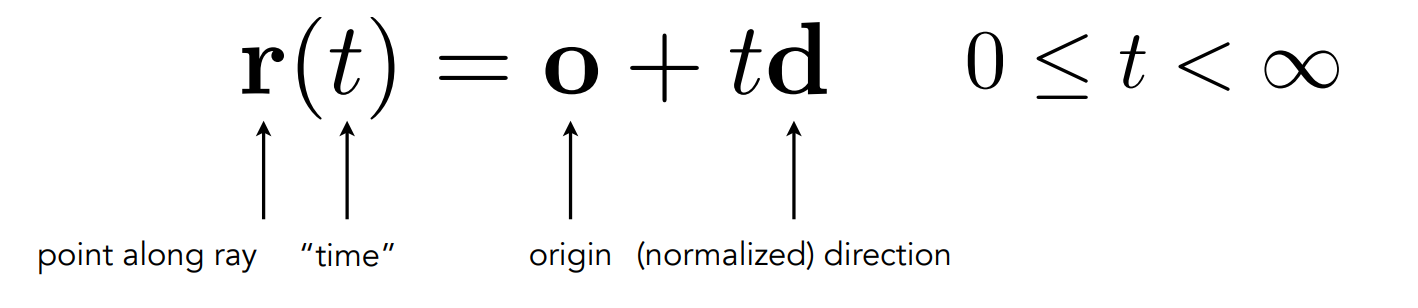
- 光线被定义为有一个起点和方向的向量
- Equation: r ( t ) = o + t d , 0 ≤ t < ∞ \mathbf{r}(t)=\mathbf{o}+t \mathbf{d}, 0 \leq t<\infty r(t)=o+td,0≤t<∞
Ray Intersection With Sphere
- Ray: r ( t ) = o + t d , 0 ≤ t < ∞ \mathbf{r}(t)=\mathbf{o}+t \mathbf{d}, 0 \leq t<\infty r(t)=o+td,0≤t<∞
- Sphere: p : ( p − c ) 2 − R 2 = 0 \mathbf{p}:(\mathbf{p}-\mathbf{c})^2-R^2=0 p:(p−c)2−R2=0
由于点需要满足两个方程,所以
(
o
+
t
d
−
c
)
2
−
R
2
=
0
(\mathbf{o}+t \mathbf{d}-\mathbf{c})^2-R^2=0
(o+td−c)2−R2=0
展开后也就有,
a
t
2
+
b
t
+
c
=
0
,
where
a
=
d
⋅
d
b
=
2
(
o
−
c
)
⋅
d
c
=
(
o
−
c
)
⋅
(
o
−
c
)
−
R
2
t
=
−
b
±
b
2
−
4
a
c
2
a
\begin{aligned} &a t^2+b t+c=0, \text { where } \\ &a=\mathbf{d} \cdot \mathbf{d} \\ &b=2(\mathbf{o}-\mathbf{c}) \cdot \mathbf{d} \\ &c=(\mathbf{o}-\mathbf{c}) \cdot(\mathbf{o}-\mathbf{c})-R^2 \\ &t=\frac{-b \pm \sqrt{b^2-4 a c}}{2 a} \end{aligned}
at2+bt+c=0, where a=d⋅db=2(o−c)⋅dc=(o−c)⋅(o−c)−R2t=2a−b±b2−4ac
注意,对于解出后的结果
t
t
t,需要满足
t
≥
0
t\ge 0
t≥0
Ray Intersection With Implicit Surface
- Ray: r ( t ) = o + t d , 0 ≤ t < ∞ \mathbf{r}(t)=\mathbf{o}+t \mathbf{d}, 0 \leq t<\infty r(t)=o+td,0≤t<∞
对于任意的隐式表面,有
- General implicit surface: p : f ( p ) = 0 \mathbf{p}: f(\mathbf{p})=0 p:f(p)=0
- Substitute ray equation: f ( o + t d ) = 0 f(\mathbf{o}+t \mathbf{d})=0 f(o+td)=0
解出 Substitute ray equation 即可
注意,解出的结果需要是实数并且为非负数
Ray Intersection With Triangle Mesh
Convert It to Ray Intersection With Plane
-
Applications
- Rendering: visibility, shadows, lighting
- Geometry: inside/outside test (计算是否一个点是否在形状内部或者是外部,封闭物体)
- 在形状上取一个点找一个光线求交点,如果是奇数个交点,那么点就一定在物体内,否则在物体外
-
Compute
- Simple idea: just intersect ray with each triangle [Simple, but slow (acceleration?) ]
- Acceleration: 将光线和三角形求交转化为光线和平面求交,然后再判定交点是否在三角形内
Plane Equation
- Plane is defined by normal vector and a point on plane

Ray Intersection With Plane
-
Ray equation: r ( t ) = o + t d , 0 ≤ t < ∞ \mathbf{r}(t)=\mathbf{o}+t \mathbf{d}, 0 \leq t<\infty r(t)=o+td,0≤t<∞
-
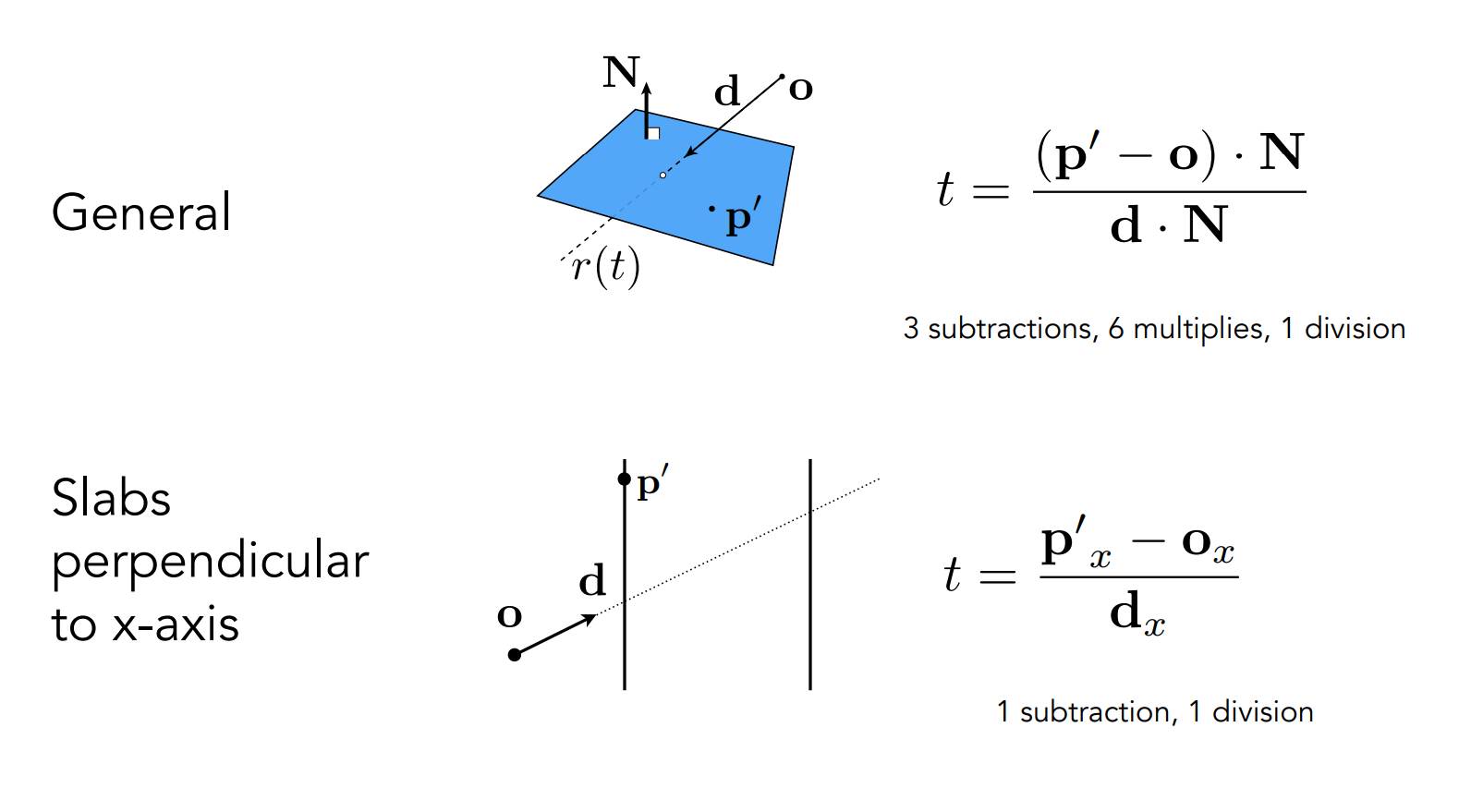
Plane equation: p : ( p − p ′ ) ⋅ N = 0 \mathbf{p}:\left(\mathbf{p}-\mathbf{p}^{\prime}\right) \cdot \mathbf{N}=0 p:(p−p′)⋅N=0
-
Solve for intersection
set p = r ( t ) and solve for t ( p − p ′ ) ⋅ N = ( o + t d − p ′ ) ⋅ N = 0 t = ( p ′ − o ) ⋅ N d ⋅ N \begin{aligned} & \text{set}\ \mathbf{p}=\mathbf{r}(t) \ \text{and solve for}\ t\\ &\left(\mathbf{p}-\mathbf{p}^{\prime}\right) \cdot \mathbf{N}=\left(\mathbf{o}+t \mathbf{d}-\mathbf{p}^{\prime}\right) \cdot \mathbf{N}=0 \\ &t=\frac{\left(\mathbf{p}^{\prime}-\mathbf{o}\right) \cdot \mathbf{N}}{\mathbf{d} \cdot \mathbf{N}} \end{aligned} set p=r(t) and solve for t(p−p′)⋅N=(o+td−p′)⋅N=0t=d⋅N(p′−o)⋅N
- Check: 0 ≤ t < ∞ 0 \leq t<\infty 0≤t<∞,判断这个点是否在三角形内
Möller Trumbore Algorithm
A faster approach, giving barycentric coordinate directly (以另外一个形式描述平面)
O
→
+
t
D
→
=
(
1
−
b
1
−
b
2
)
P
→
0
+
b
1
P
→
1
+
b
2
P
→
2
\overrightarrow{\mathbf{O}}+t \overrightarrow{\mathbf{D}}=\left(1-b_1-b_2\right) \overrightarrow{\mathbf{P}}_0+b_1 \overrightarrow{\mathbf{P}}_1+b_2 \overrightarrow{\mathbf{P}}_2
O+tD=(1−b1−b2)P0+b1P1+b2P2
- 联立光线和重心坐标
- 使用克莱姆法则解这个线性方程组,解出 b 1 , b 2 , t b_1,b_2,t b1,b2,t
- 如果 1 − b 1 − b 2 , b 1 , b 2 1-b_1-b_2, b_1, b_2 1−b1−b2,b1,b2 都是非负的,那么点在三角形内
Accelerating Ray-Surface Intersection
- Simple ray-scene intersection
- Exhaustively test ray-intersection with every triangle
- Find the closest hit (i.e. minimum t)
- Problem
- Naive algorithm = #pixels ⨉ # triangles (⨉ #bounces)
- Slow!!!
Bounding Volumes
- Quick way to avoid intersections: bound complex object with a simple volume
- Object is fully contained in the volume
- If it doesn’t hit the volume, it doesn’t hit the object
- So test BVol first, then test object if it hits (如果一个光线连包围盒都碰不到,就也不可能碰到里面的物体)
- Understanding: box is the intersection of 3 pairs of slabs (认为长方体是三组对面形成的交集)
- Specifically: We often use an Axis-Aligned Bounding Box (AABB) [轴对齐包围盒]
Ray Intersection with Axis-Aligned Box
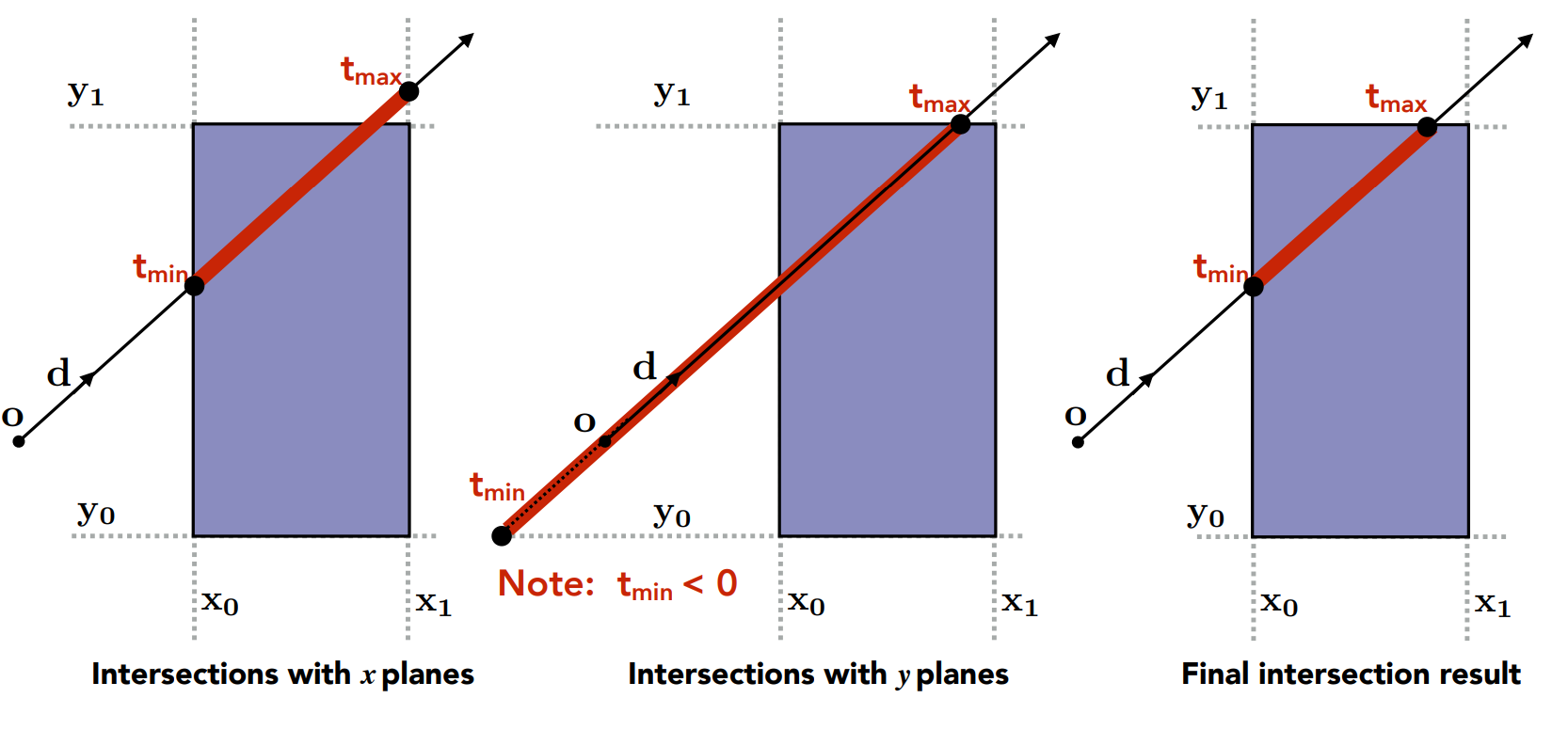
- 考虑二维的情况(两组对面): Compute intersections with slabs and take intersection of
t
m
i
n
/
t
m
a
x
t_{min}/t_{max}
tmin/tmax intervals
- 对得到的两组线段求交集即可
- Recall: a box (3D) = three pairs of infinitely large slabs
- Key ideas
- The ray enters the box only when it enters all pairs of slabs(如果三个对面都有光线进入,才能说光线进入了盒子)
- The ray exits the box as long as it exits any pair of slabs (只要光线离开任意一个对面,光线就算离开了这个盒子)
- For each pair, calculate the t m i n t_{min} tmin and t m a x t_{max} tmax (negative is fine)
- For the 3D box, t e n t e r = max { t m i n } , t e x i t = min { t m a x } t_{enter} = \max\{t_{min}\}, t_{exit} = \min\{t_{max}\} tenter=max{tmin},texit=min{tmax}
- If t e n t e r < t e x i t t_{enter} < t_{exit} tenter<texit, we know the ray stays a while in the box (so they must intersect!)
- physical correctness
- t e x i t < 0 t_{exit}<0 texit<0, The box is “behind” the ray — no intersection
- t e x i t ≥ 0 , t e n t e r < 0 t_{exit}\ge0, t_{enter}<0 texit≥0,tenter<0, The ray’s origin is inside the box — certainly have intersection
In summary, Ray and AABB intersect iff
t
e
n
t
e
r
<
t
e
x
i
t
and
t
e
x
i
t
≥
0
t_{enter} < t_{exit}\ \text{and}\ t_{exit}\ge0
tenter<texit and texit≥0
Why Axis-Aligned
- 在求交时计算方便
Using AABBs to accelerate ray tracing
Uniform Spatial Partitions (Grids)
- Precomputation
- Find bounding box
- Create grid
- Store each object in overlapping cells
- 只考虑物体的表面
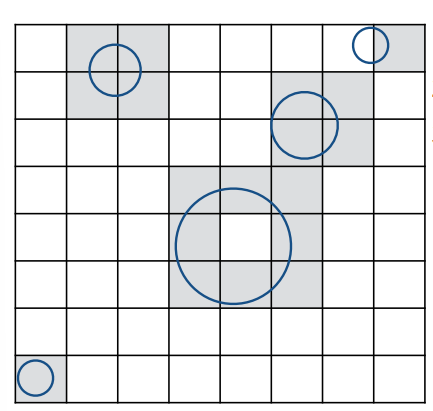
- Ray Tracing
- Step through grid in ray traversal order
- For each grid cell, Test intersection with all objects stored at that cell
- 让光线经过各个包围盒中的区块,让光线和盒子求交(假设光线和盒子求交的运行速度远大于和物体求交的运行速度)
- 如果发现和光线相交的盒子内有物体,再让物体和盒子求交,通过这样找到所有的交点
-
Grid Resolution?
- Heuristic
- #cells = C * #objs
- C = 27 in 3D
- Heuristic
-
Pros & Cons


Spatial Partitions
-
基于 Grid 方法的优化,物体稀疏的地方不需要用很多格子
-
Examples
- Oct-Tree: 以下的八叉树是二维的情况,在二维空间中就是四叉的,把空间切成了不均匀的结构
- KD-Tree: KD-Tree 永远是找到一个轴把空间分成两个部分,和维数无关,把空间划分成了类似二叉树的结构,水平划分和数值划分是交替的以保证空间的划分是均匀的,计算简单
- BSP-Tree: 对空间的二分方法,每一次选择一个方向把节点的分开,和 KD-Tree 的区别是不是横平竖直的划分,会随着维度的升高计算变得复杂

-
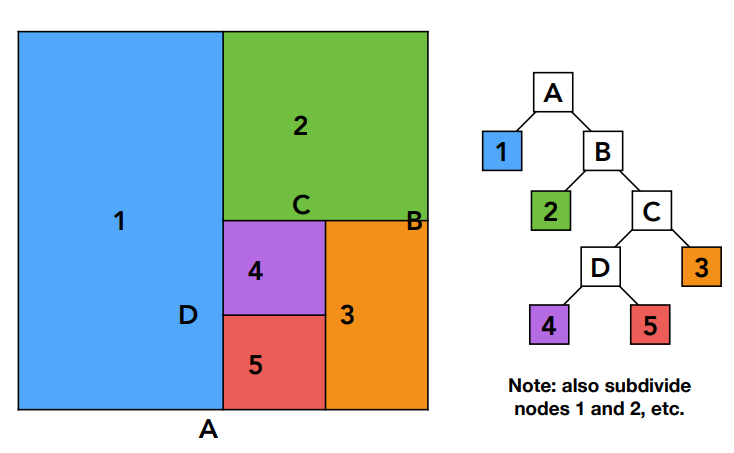
KD-Tree Pre-Processing
- 此处只考虑每个格子划分了一次,实际中别的格子可能也需要划分
- 只在叶子节点存储三角形
-
Data Structure for KD-Trees
- Internal nodes store
- split axis: x-, y-, or z-axis
- split position: coordinate of split plane along axis
- children: pointers to child nodes
- No objects are stored in internal nodes
- Leaf nodes store
- list of objects
- Internal nodes store
-
Cons of KD-Tree
- 很难判定一个三角形是否和一个立方体有交集,算法很难实现
- 如果一个物体和多个盒子都有交集(出现在多个叶子节点中),KD-Tree 在这点上并不直观
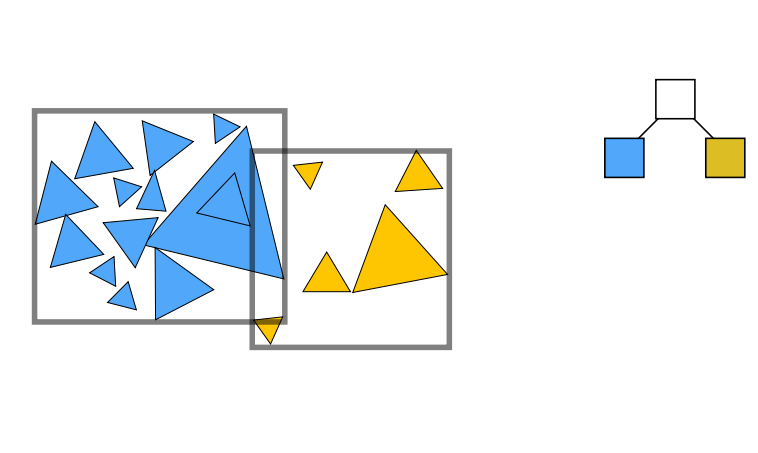
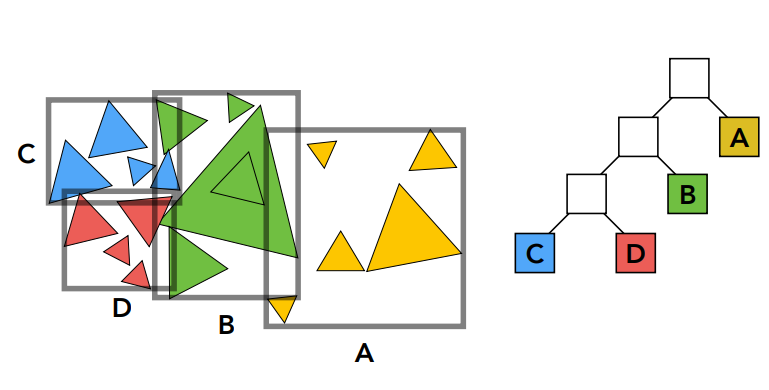
Object Partitions & Bounding Volume Hierarchy (BVH)
- 划分物体而不是划分空间
- 对于下图,把三角形划分成蓝色和黄色三角形,并重新计算蓝色和黄色三角形的包围盒
- 终止条件是一堆里最多有 N N N 个三角形
-
Pros of BVH
- 节省了三角形和包围盒求交问题
- 保证了一个三角形只在一个盒子里
-
Cons of BVH
- 不同的 Bounding Box 是有可能相交的
- 不能解决动态的物体,BVH 需要重新计算
-
Summary
- Find bounding box
- Recursively split set of objects in two subsets
- Recompute the bounding box of the subsets
- Stop when necessary
- Store objects in each leaf node
-
Methods to subdivide a node
- Choose a dimension to split
- Heuristic #1: Always choose the longest axis in node
- 让最长的轴变短,让最终的划分是比较均匀的
- Heuristic #2: Split node at location of median object
- 取中间的物体指的是,如果有 n n n 个三角形,找的是 n 2 \frac{n}{2} 2n 处的三角形,保证切分后的三角形数量差不多,以保证生成的树是平衡的,减少最终的搜索时间
- 给任意一列无序的数,找到它第 i i i 大的数,可以使用快速选择算法,在 O ( n ) O(n) O(n) 内解决
-
Termination criteria
- Heuristic: stop when node contains few elements (e.g. 5)
-
Data Structure for BVHs
- Internal nodes store
- Bounding box
- Children: pointers to child nodes
- Leaf nodes store
- Bounding box
- List of objects
- Nodes represent subset of primitives in scene
- All objects in subtree
- Internal nodes store
BVH Traversal
fun Intersect(Ray ray, BVH node) {
if (ray misses node.bbox) return;
if (node is a leaf node)
test intersection with all objs;
return closest intersection;
hit1 = Intersect(ray, node.child1);
hit2 = Intersect(ray, node.child2);
return the closer of hit1, hit2;
}
Basic Radiometry
- Chinese Name: 辐射度量学
Why Radiometry
-
在计算光强的时候,我们没有准确的物理定义
-
辐射度量学:定义了一系列方法和单位去描述光照
-
Accurately measure the spatial properties of light
- New terms: Radiant flux, intensity, irradiance, radiance
-
Perform lighting calculations in a physically correct manner
- Light Measurements
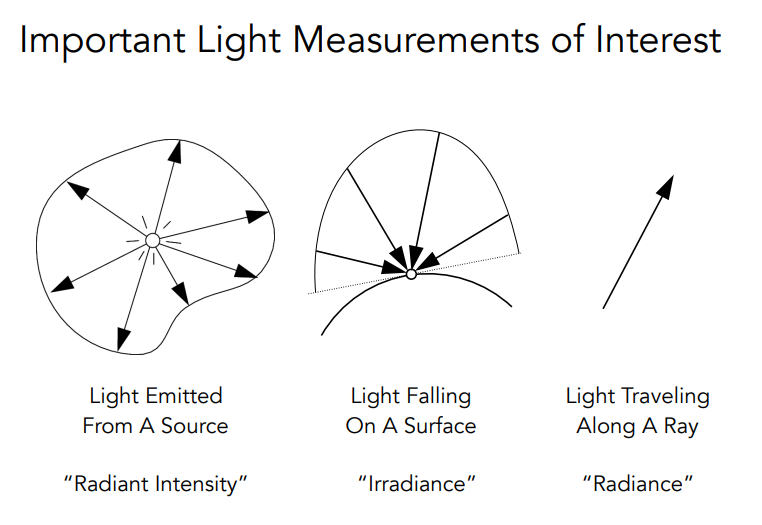
Radiant Energy and Flux (Power)
- Radiant Energy: 光源辐射出来的能量 (Barely used in CG)
Q [ J = Joule ] Q[\mathrm{~J}=\text { Joule }] Q[ J= Joule ]
- Flux (Power): 光源辐射出的单位时间的能量,目的是分析和比较两个和多个能量(去除时间的影响)
- lm = lumen (Flux 的单位,翻译是流明)
- Flux 也可以理解为单位时间通过一个感光平面的光子数目
Φ ≡ d Q d t [ W = W a t t ] [ lm = lumen ] ∗ \Phi \equiv \frac{\mathrm{d} Q}{\mathrm{~d} t}[\mathrm{~W}=\mathrm{Watt}][\operatorname{lm}=\text { lumen }]^* Φ≡ dtdQ[ W=Watt][lm= lumen ]∗
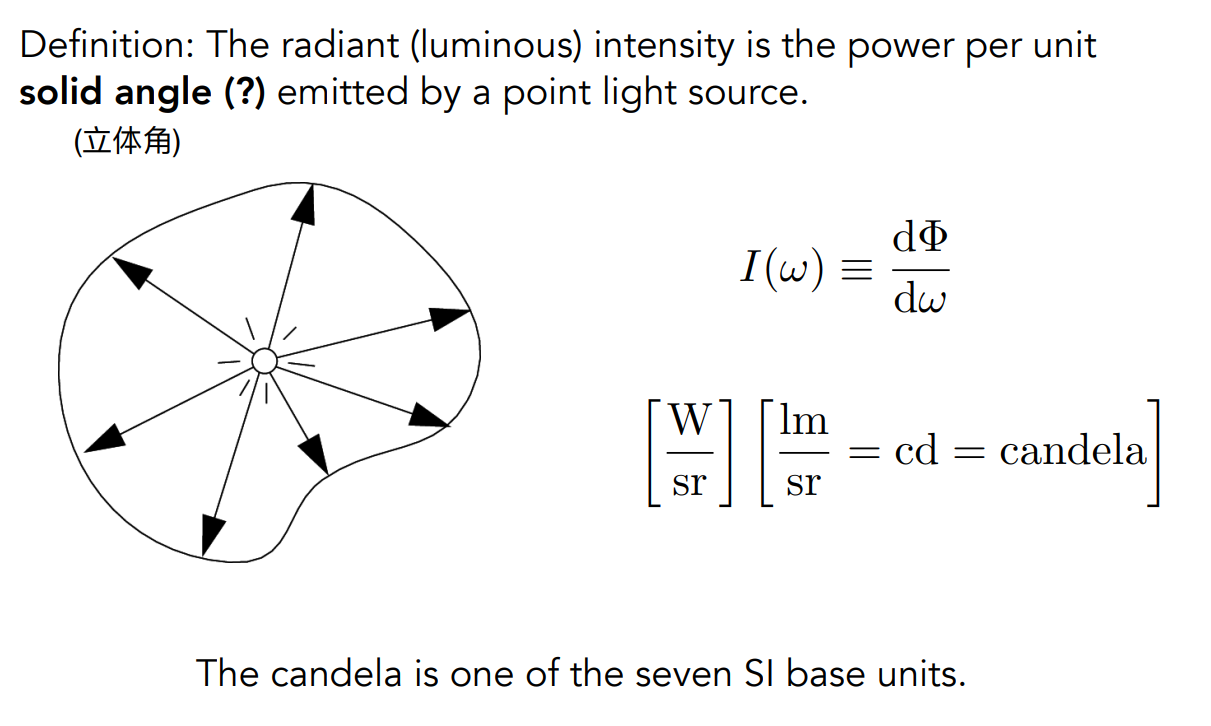
Radiant Intensity
- Radiant Intensity: The radiant (luminous) intensity is the power per unit solid angle (立体角) emitted by a point light source.
- 可以理解为能量除以立体角
- 定义了光源在任何一个方向上的亮度
I ( ω ) ≡ d Φ d ω [ W s r ] [ lm s r = c d = candela ] \begin{gathered} I(\omega) \equiv \frac{\mathrm{d} \Phi}{\mathrm{d} \omega} \\ {\left[\frac{\mathrm{W}}{\mathrm{sr}}\right]\left[\frac{\operatorname{lm}}{\mathrm{sr}}=\mathrm{cd}=\text { candela }\right]} \end{gathered} I(ω)≡dωdΦ[srW][srlm=cd= candela ]
Angles and Solid Angles
-
Angle: ratio of subtended arc length on circle to radius
- θ = l r \theta=\frac{l}{r} θ=rl
- Circle has 2 π 2 \pi 2π radians
-
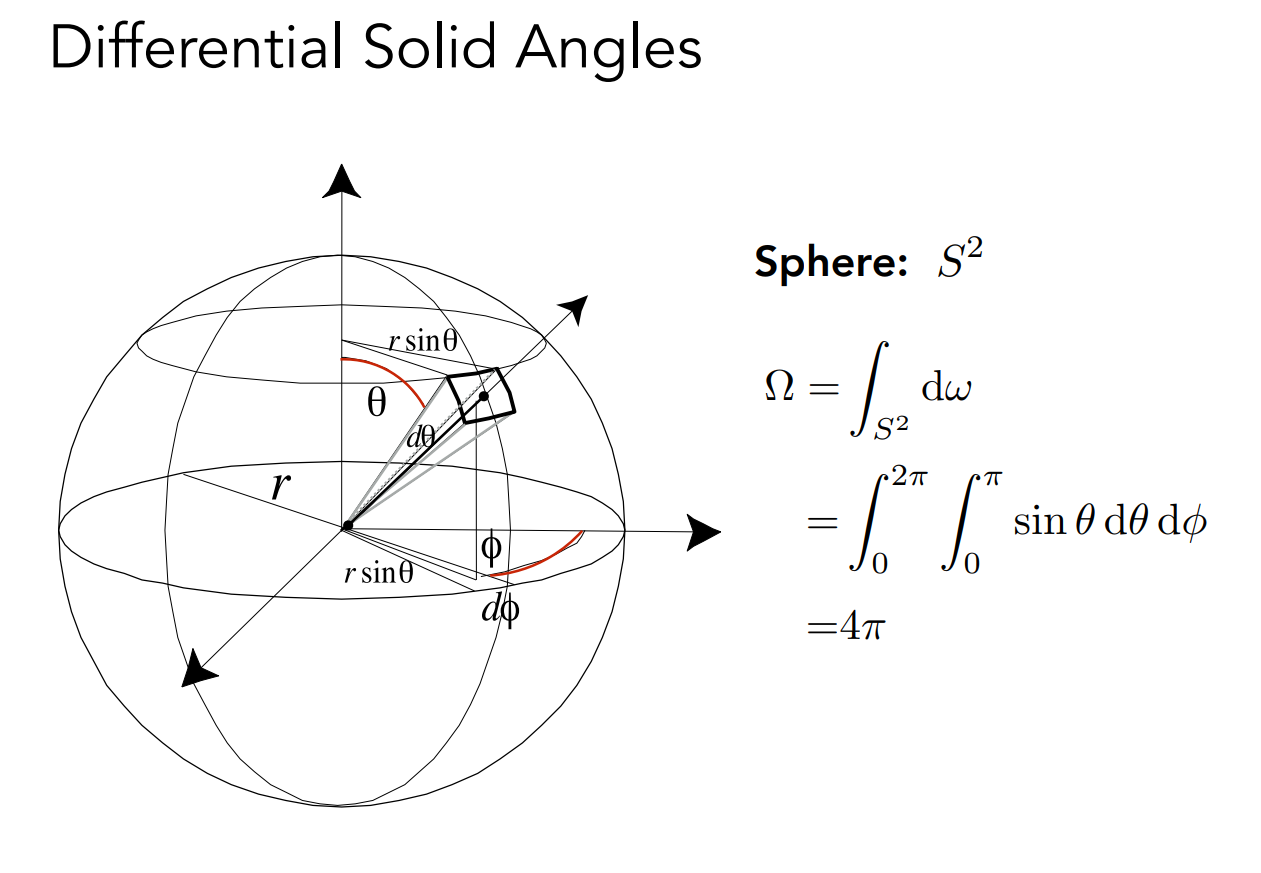
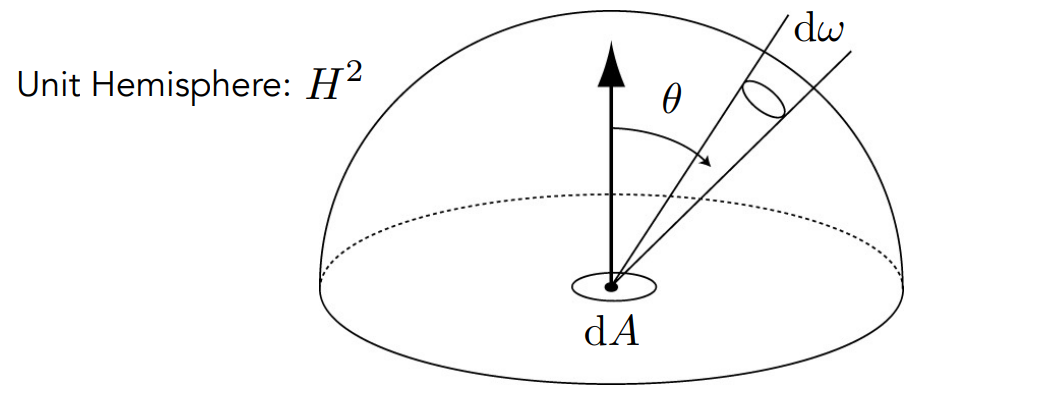
Solid angle: ratio of subtended area on sphere to radius squared
- 弧度制在三维空间中的延申,在三维空间中找一个球,从球出发形成某个大小的锥,锥会打到球面上,形成一个面积 A A A,立体角是它除以半径的平方
- 把任何一个物体投影到单位球上,在单位球上框出的范围就是立体角
- 描述一个空间中角有多大
- Ω = A r 2 \Omega=\frac{A}{r^2} Ω=r2A
- Sphere has 4 π 4 \pi 4π steradians(立体角的单位)

Differential Solid Angles
- Differential Solid Angles: 微分立体角
- 通常使用 ω \omega ω 来定义单位方向

Isotropic Point Source
-
对于一个均匀点光源,它的 Radiant Intensity 的相关计算是
-
对于所有方向上的 Intensity 积分起来可以得到 Flux
Φ = ∫ S 2 I d ω = 4 π I \begin{aligned} \Phi &=\int_{S^2} I \mathrm{~d} \omega \\ &=4 \pi I \end{aligned} Φ=∫S2I dω=4πI -
对于任何一个方向上的 Intensity 有
I = Φ 4 π I=\frac{\Phi}{4 \pi} I=4πΦ
-
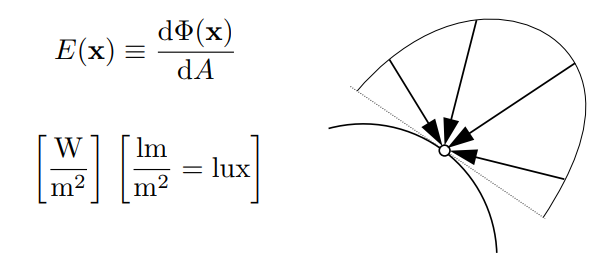
Irradiance
- The irradiance is the power per unit area incident on a surface point.
- Intensity: power per soild angle
- 注意,面需要和入射光线垂直
E ( x ) ≡ d Φ ( x ) d A [ W m 2 ] [ lm m 2 = lux ] \begin{gathered} E(\mathbf{x}) \equiv \frac{\mathrm{d} \Phi(\mathbf{x})}{\mathrm{d} A} \\ {\left[\frac{\mathrm{W}}{\mathrm{m}^2}\right]\left[\frac{\operatorname{lm}}{\mathrm{m}^2}=\operatorname{lux}\right]} \end{gathered} E(x)≡dAdΦ(x)[m2W][m2lm=lux]
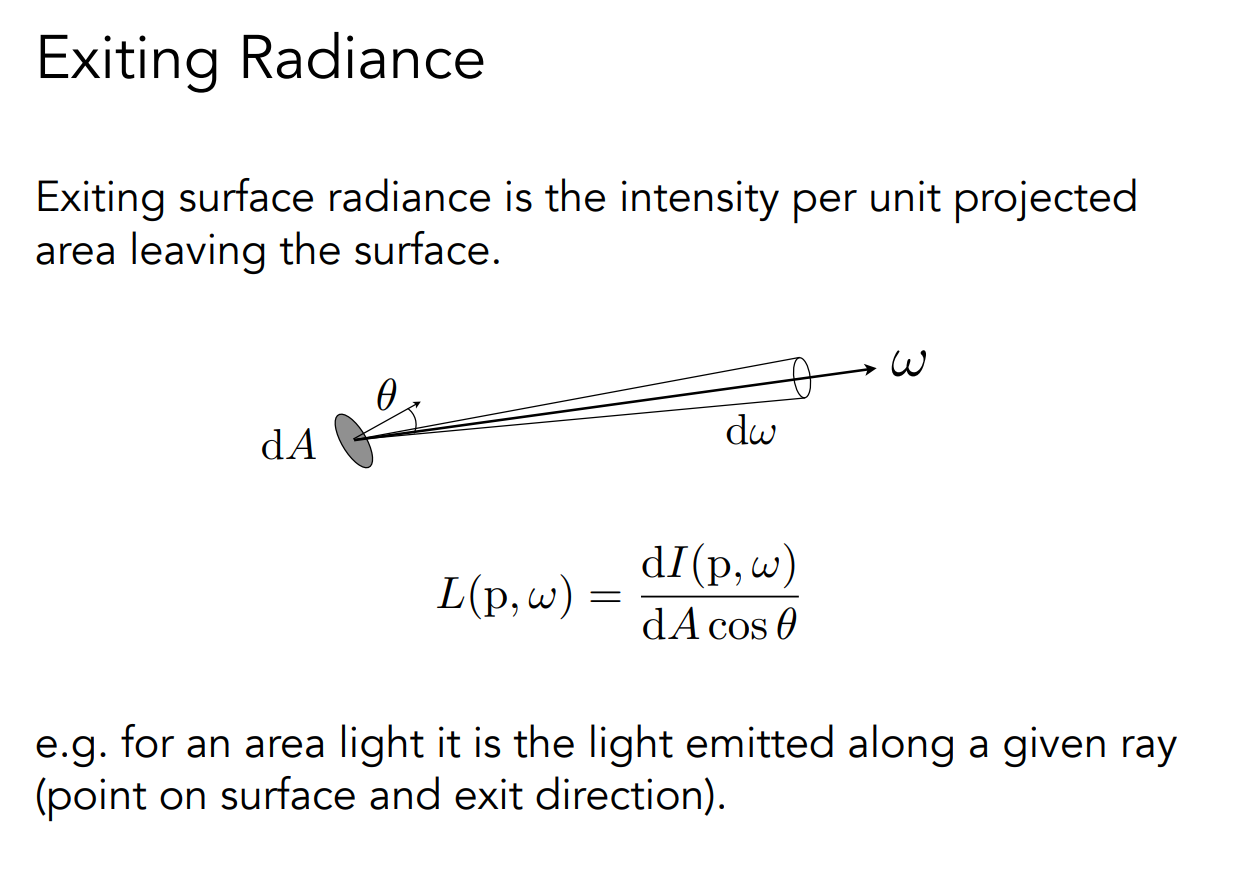
Radiance
Radiance is the fundamental field quantity that describes the distribution of light in an environment
- Radiance: The radiance (luminance) is the power emitted, reflected, transmitted or received by a surface, per unit solid angle, per projected unit area.
- 考虑某一个确定的微小面和一个方向
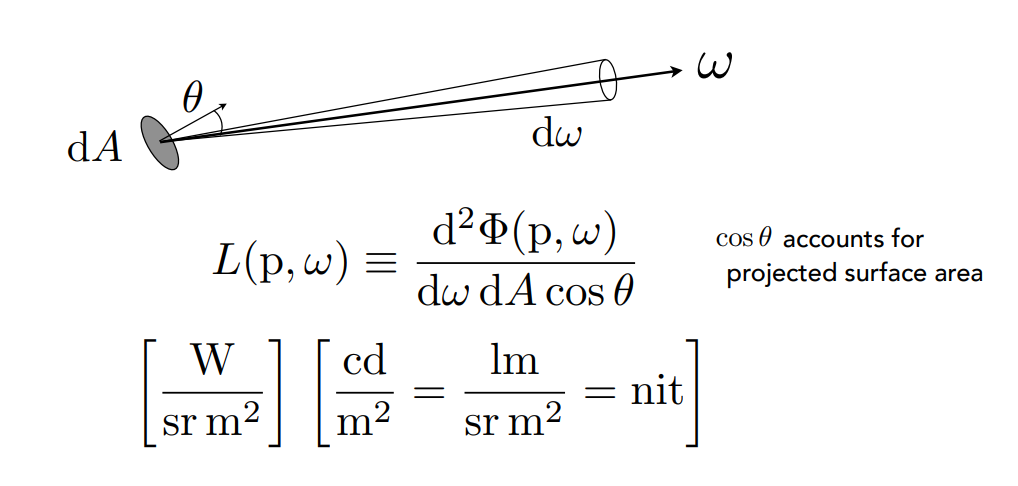
L ( p , ω ) ≡ d 2 Φ ( p , ω ) d ω d A cos θ L(\mathrm{p}, \omega) \equiv \frac{\mathrm{d}^2 \Phi(\mathrm{p}, \omega)}{\mathrm{d} \omega \mathrm{d} A \cos \theta} L(p,ω)≡dωdAcosθd2Φ(p,ω)
-
Recall
- Irradiance: power per projected unit area
- Intensity: power per solid angle
-
So
- Radiance: Irradiance per solid angle
- Radiance: Intensity per projected unit area
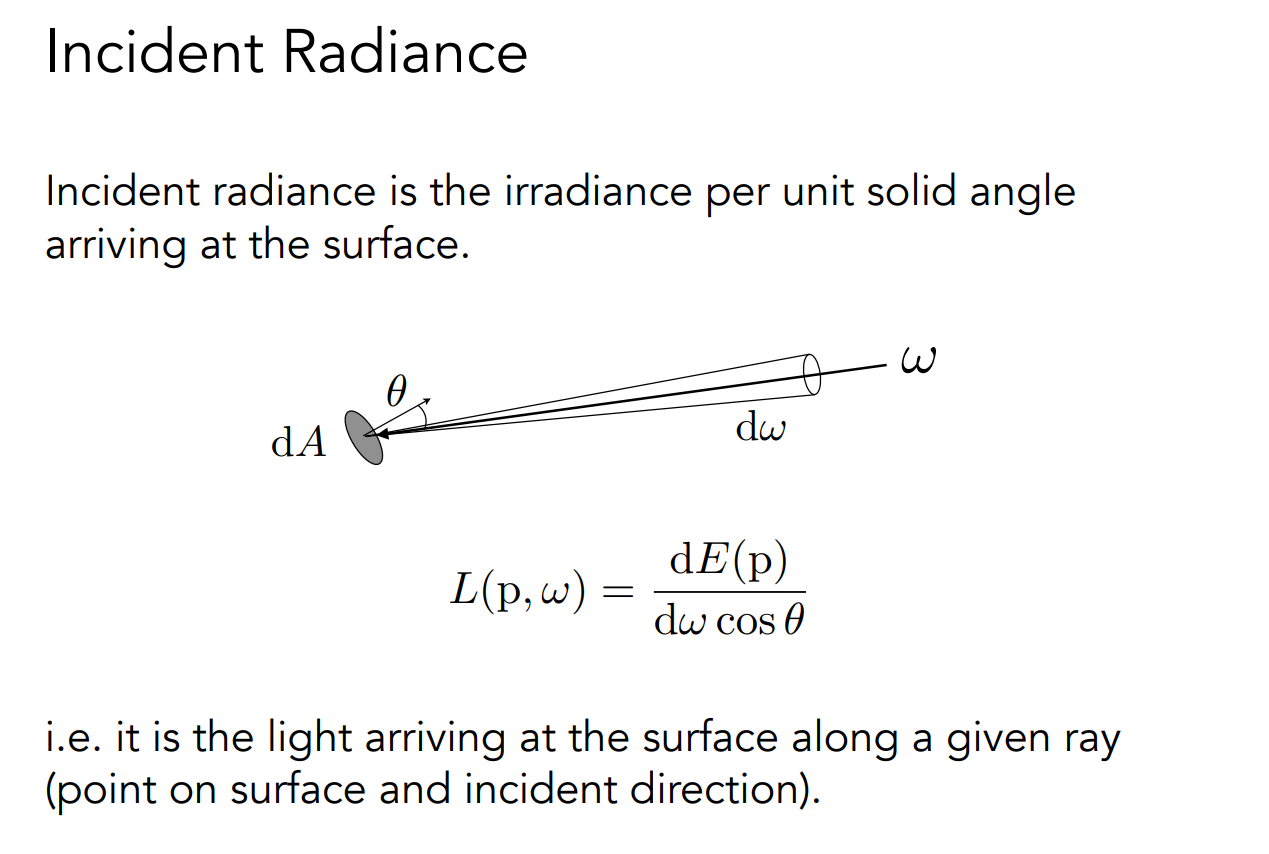
Irradiance vs. Radiance
- Irradiance: total power received by area dA
- 某一个小区域内接收到的所以能量
- Radiance: power received by area dA from “direction” dω
- 某一个小区域的某一个方向上接受到的能量
d E ( p , ω ) = L i ( p , ω ) cos θ d ω E ( p ) = ∫ H 2 L i ( p , ω ) cos θ d ω \begin{aligned} d E(\mathrm{p}, \omega) &=L_i(\mathrm{p}, \omega) \cos \theta \mathrm{d} \omega \\ E(\mathrm{p}) &=\int_{H^2} L_i(\mathrm{p}, \omega) \cos \theta \mathrm{d} \omega \end{aligned} dE(p,ω)E(p)=Li(p,ω)cosθdω=∫H2Li(p,ω)cosθdω
Bidirectional Reflectance Distribution Function (BRDF)
- 双向反射分布函数
- 告诉你不同反射方向上分布的能量情况
Reflection at a Point
Radiance from direction ωi turns into the power E that dA receives Then power E will become the radiance to any other direction ωo
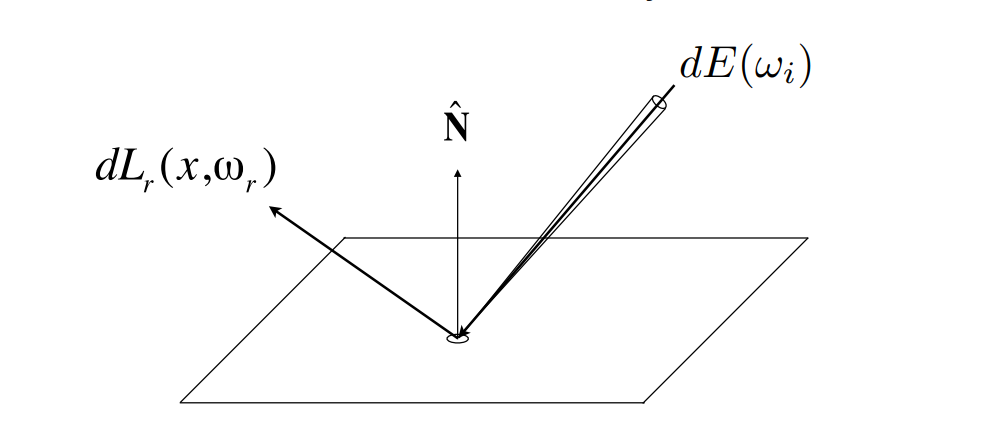
- Differential irradiance incoming: d E ( ω i ) = L ( ω i ) cos θ i d ω i \quad d E\left(\omega_i\right)=L\left(\omega_i\right) \cos \theta_i d \omega_i dE(ωi)=L(ωi)cosθidωi
- Differential radiance exiting (due to d E ( ω i ) d E\left(\omega_i\right) dE(ωi) ): d L r ( ω r ) \quad d L_r\left(\omega_r\right) dLr(ωr)
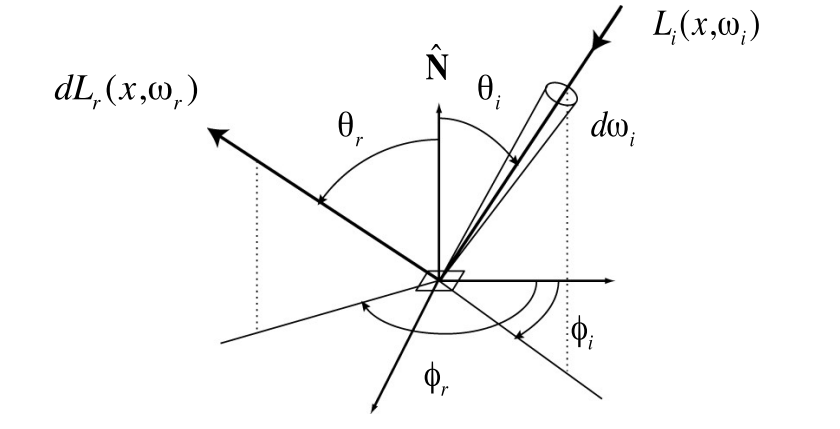
BRDF
The Bidirectional Reflectance Distribution Function (BRDF) represents how much light is reflected into each outgoing direction ω r \omega_r ωr from each incoming direction
BRDF 描述了光线和物体是如何作用的
f
r
(
ω
i
→
ω
r
)
=
d
L
r
(
ω
r
)
d
E
i
(
ω
i
)
=
d
L
r
(
ω
r
)
L
i
(
ω
i
)
cos
θ
i
d
ω
i
[
1
s
r
]
f_r\left(\omega_i \rightarrow \omega_r\right)=\frac{\mathrm{d} L_r\left(\omega_r\right)}{\mathrm{d} E_i\left(\omega_i\right)}=\frac{\mathrm{d} L_r\left(\omega_r\right)}{L_i\left(\omega_i\right) \cos \theta_i \mathrm{~d} \omega_i} \quad\left[\frac{1}{\mathrm{sr}}\right]
fr(ωi→ωr)=dEi(ωi)dLr(ωr)=Li(ωi)cosθi dωidLr(ωr)[sr1]
The Reflection Equation
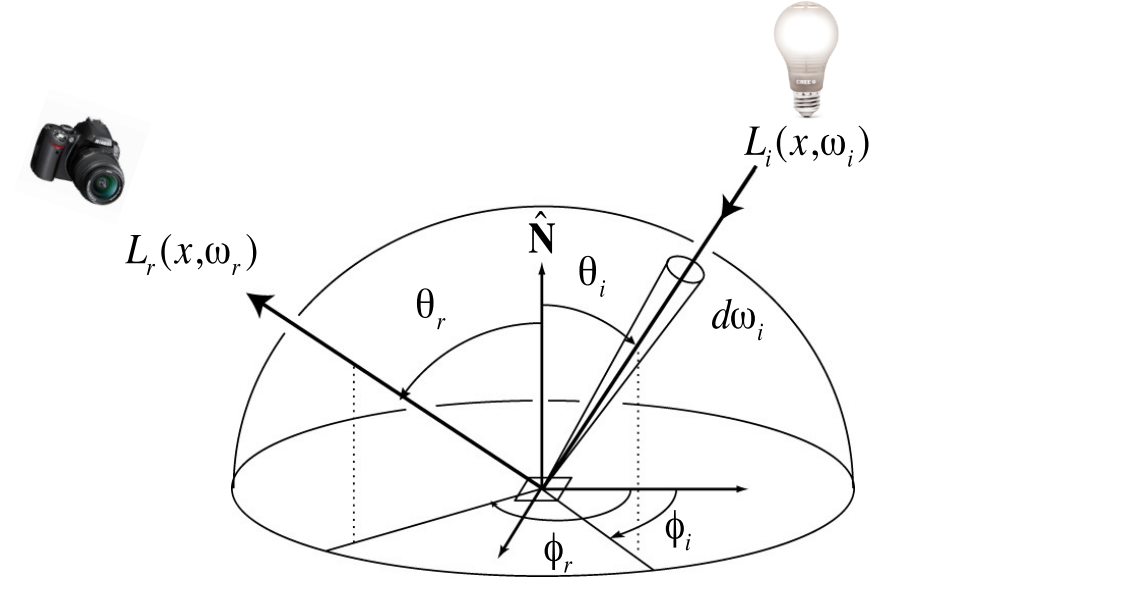
- Reflection Equation 描述了任何一个着色点在各种不同光照环境下对出射光线的贡献
L r ( p , ω r ) = ∫ H 2 f r ( p , ω i → ω r ) L i ( p , ω i ) cos θ i d ω i L_r\left(\mathrm{p}, \omega_r\right)=\int_{H^2} f_r\left(\mathrm{p}, \omega_i \rightarrow \omega_r\right) L_i\left(\mathrm{p}, \omega_i\right) \cos \theta_i \mathrm{~d} \omega_i Lr(p,ωr)=∫H2fr(p,ωi→ωr)Li(p,ωi)cosθi dωi
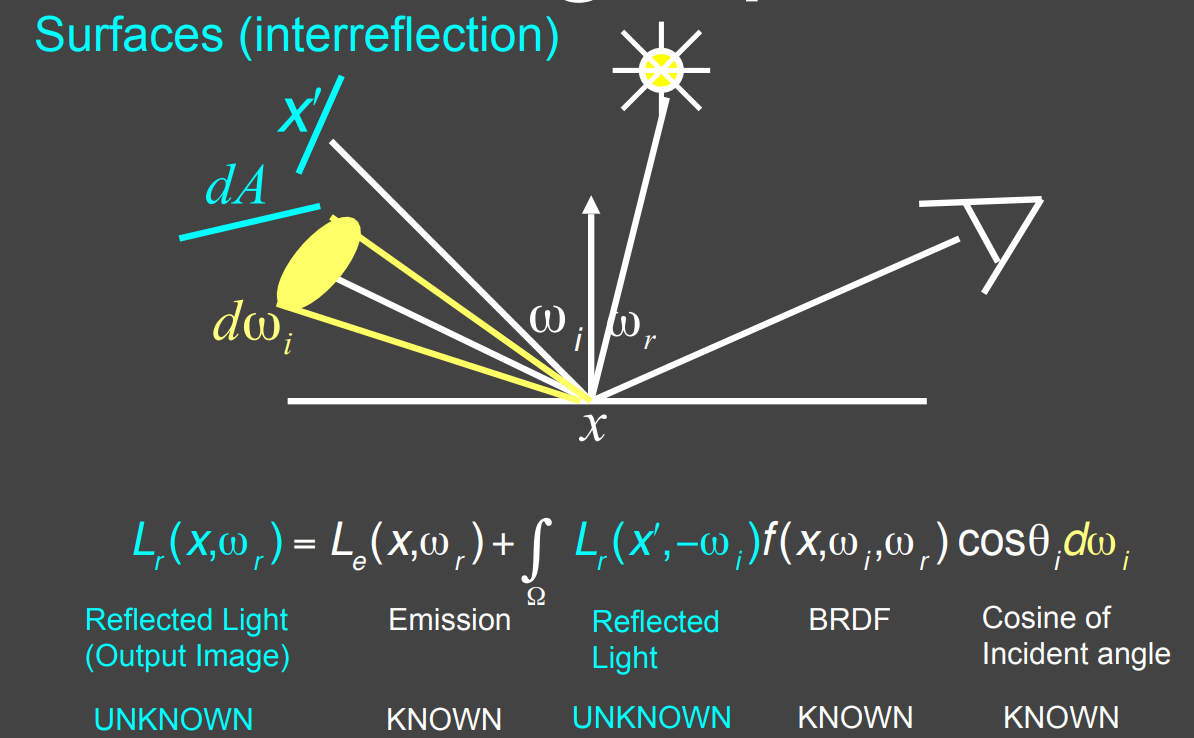
Challenge: Recursive Equation
- 能够到达着色点的光线不止有光源,还有其他物体的反射出去的 Radiance
The Rendering Equation
Re-write the reflection equation:
L
r
(
p
,
ω
r
)
=
∫
H
2
f
r
(
p
,
ω
i
→
ω
r
)
L
i
(
p
,
ω
i
)
cos
θ
i
d
ω
i
L_r\left(\mathrm{p}, \omega_r\right)=\int_{H^2} f_r\left(\mathrm{p}, \omega_i \rightarrow \omega_r\right) L_i\left(\mathrm{p}, \omega_i\right) \cos \theta_i \mathrm{~d} \omega_i
Lr(p,ωr)=∫H2fr(p,ωi→ωr)Li(p,ωi)cosθi dωi
by adding an Emission term to make it general(考虑物体会发光的情况),这样就得到了 Rendering Equation
L
o
(
p
,
ω
o
)
=
L
e
(
p
,
ω
o
)
+
∫
Ω
+
L
i
(
p
,
ω
i
)
f
r
(
p
,
ω
i
,
ω
o
)
(
n
⋅
ω
i
)
d
ω
i
L_o\left(p, \omega_o\right)=L_e\left(p, \omega_o\right)+\int_{\Omega^{+}} L_i\left(p, \omega_i\right) f_r\left(p, \omega_i, \omega_o\right)\left(n \cdot \omega_i\right) \mathrm{d} \omega_i
Lo(p,ωo)=Le(p,ωo)+∫Ω+Li(p,ωi)fr(p,ωi,ωo)(n⋅ωi)dωi
Note: now, we assume that all directions are pointing outwards!
Understanding the rendering equation
Reflection Equation
- 当有一个点光源时

- 当有很多点光源时
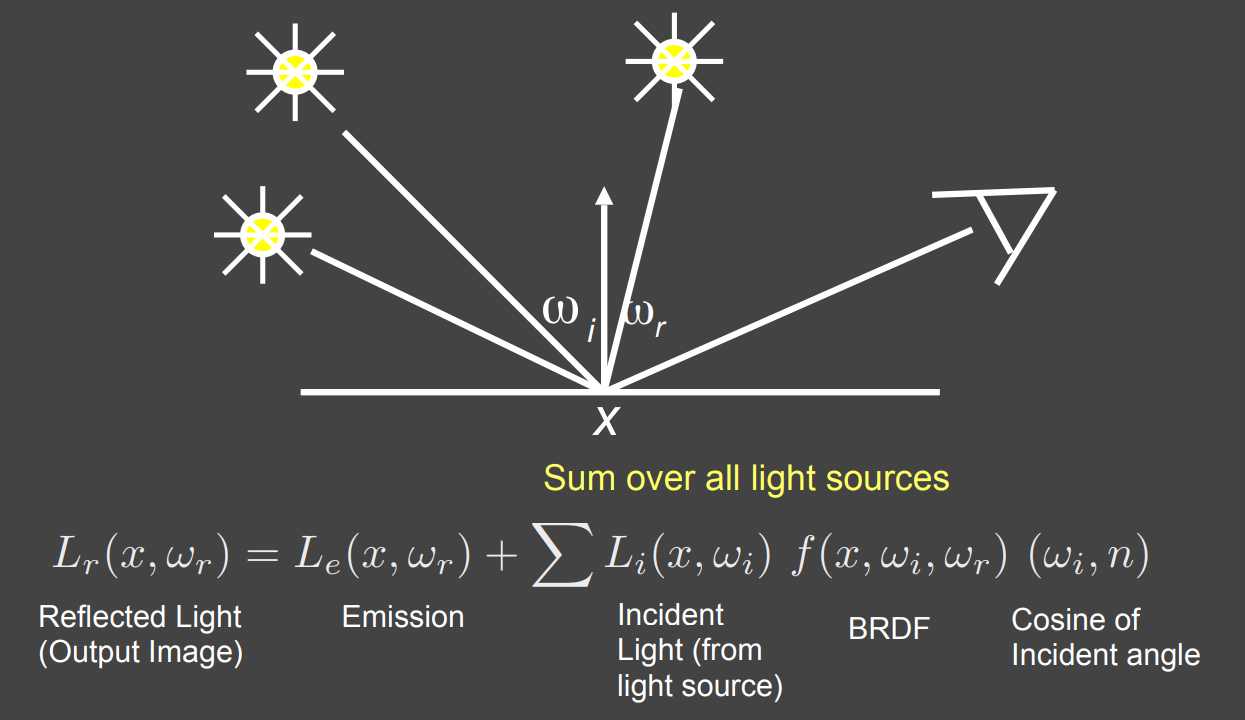
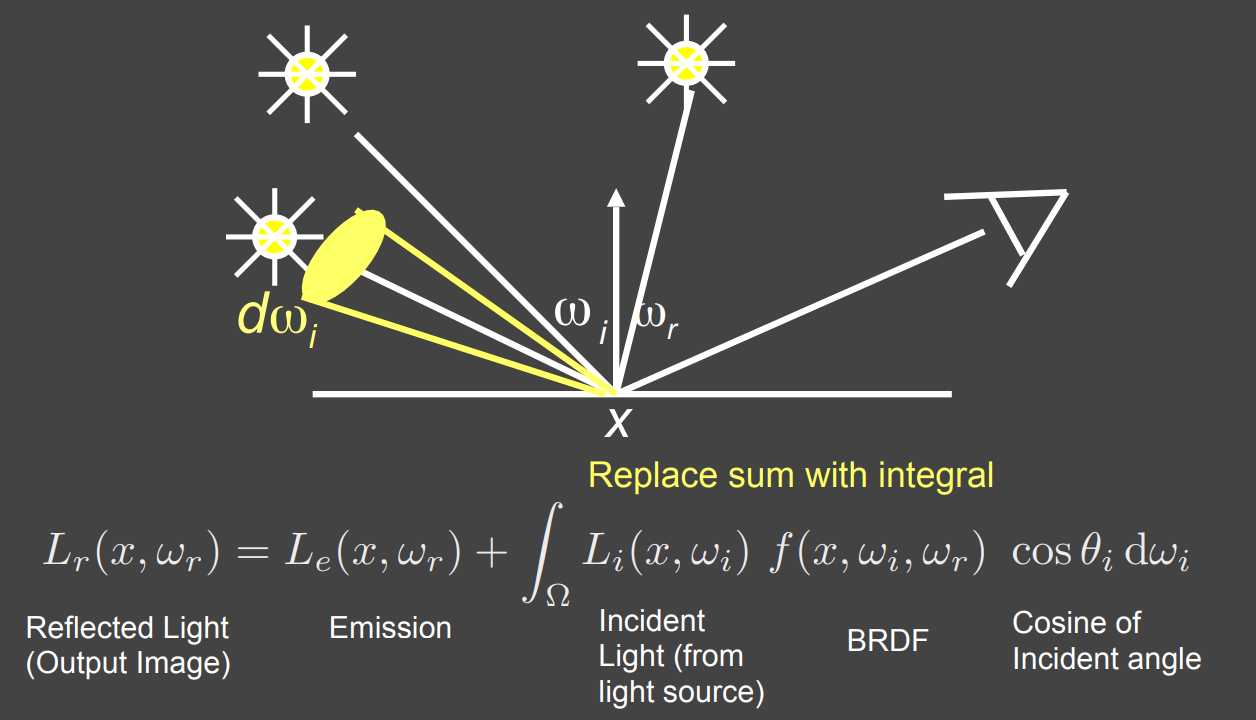
- 当有面光源时(看成点光源的集合)
- 当有其他物体反射的 Radiance 时
Rendering Equation as Integral Equation
- 对渲染方程进行简写后的结果

Linear Operator Equation
- 简化写成算子形式,目的是对渲染方程进行求解,中间省略了很多步骤
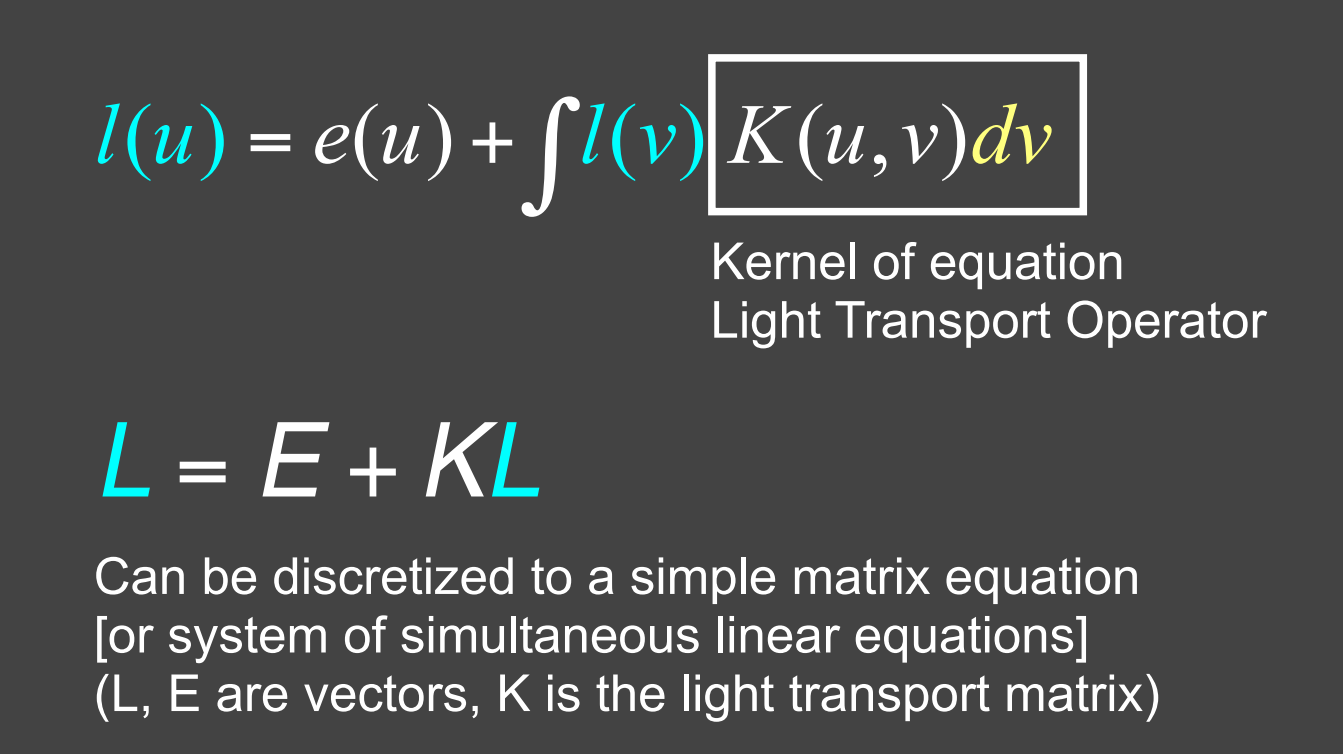
Ray Tracing and extensions
- General class numerical Monte Carlo methods
- Approximate set of all paths of light in scene
Ray Tracing
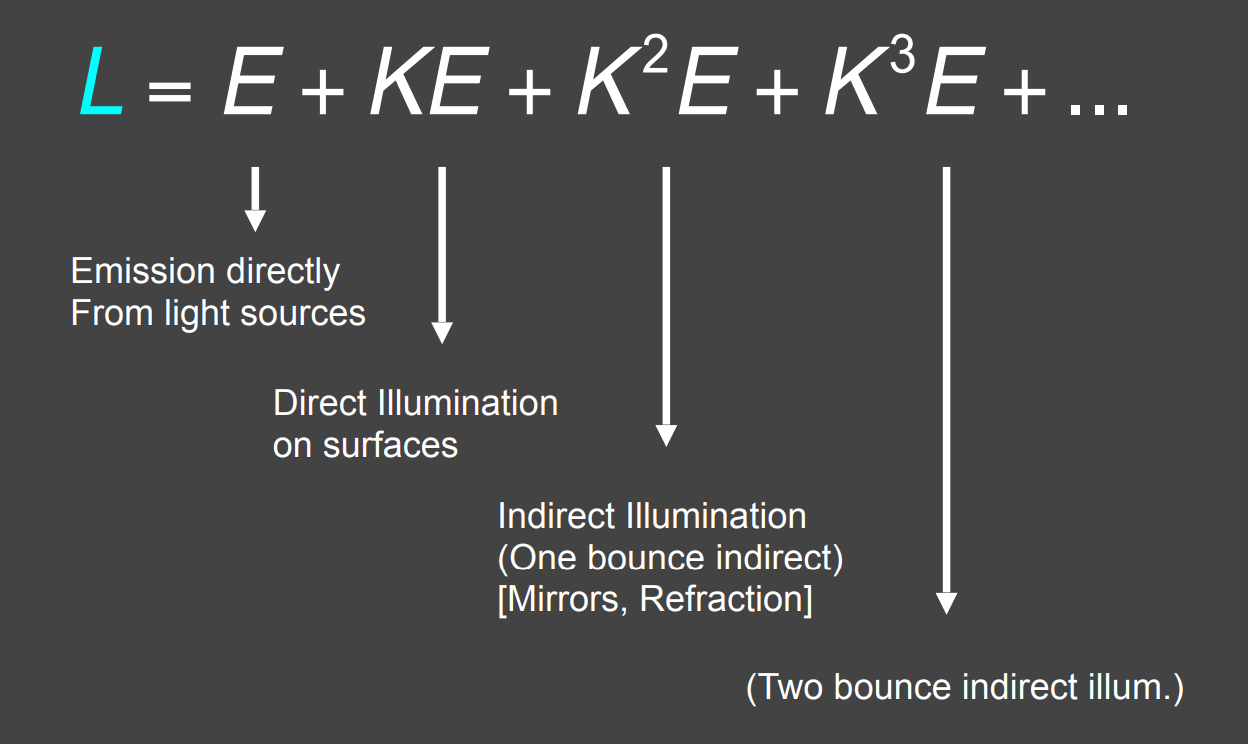
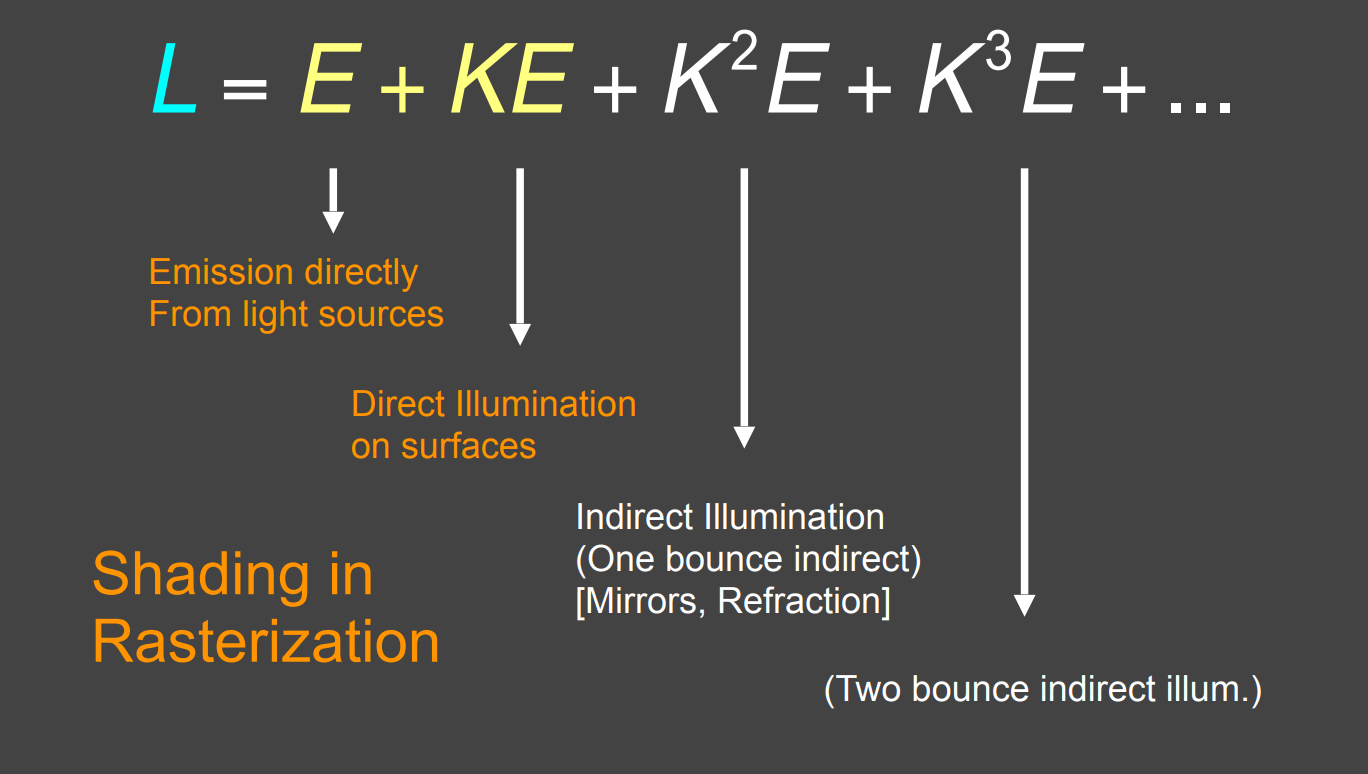
- 将最后看到的图写成直接看到光源、弹射一次、弹射二次…、弹射 n n n 次的和,结果是全局光照

- 光栅化只解决了 E + K E E+KE E+KE 部分
Monte Carlo Path Tracing
Monte Carlo Integration
Why&What Monte Carlo Integration
- 对于给定函数的定积分,直接通过解析计算求解难度太大
- Monte Carlo Integration 是一种数值方法,求出的只是一个数
- 在积分域内不断采样,假设积分区域是长方形,对于所有采样得到的结果求平均
Define Monte Carlo Integration
- Definite integral
∫ a b f ( x ) d x \quad \int_a^b f(x) d x ∫abf(x)dx
- Random variable
X i ∼ p ( x ) \quad X_i \sim p(x) Xi∼p(x)
- Monte Carlo estimator
F N = ∫ f ( x ) d x = 1 N ∑ i = 1 N f ( X i ) p ( X i ) \quad F_N=\int f(x) \mathrm{d} x=\frac{1}{N} \sum_{i=1}^N \frac{f\left(X_i\right)}{p\left(X_i\right)} FN=∫f(x)dx=N1i=1∑Np(Xi)f(Xi)
- Note that
- The more samples, the less variance.
- Sample on x x x, integrate on x x x.

-
如果随机变量均匀采样(均匀分布),Monte Carlo Integration 有以下形式
-
Definite integral
∫ a b f ( x ) d x \int_a^b f(x) d x ∫abf(x)dx -
Uniform random variable
X i ∼ p ( x ) = 1 b − a X_i \sim p(x)=\frac{1}{b-a} Xi∼p(x)=b−a1
- Basic Monte Carlo estimator
F N = b − a N ∑ i = 1 N f ( X i ) F_N=\frac{b-a}{N} \sum_{i=1}^N f\left(X_i\right) FN=Nb−ai=1∑Nf(Xi)
-
Path Tracing
Motivation: Problems of Whitted-Style Ray Tracing
For Whitted-style ray tracing, it has some cons/ simplifications
-
Always perform specular reflections / refractions
-
Stop bouncing at diffuse surfaces
Whitted-Style Ray Tracing: Problem 1
- Whitted-Style Ray Tracing 对于 glossy materials 还认为光线是镜面反射的话是不对的

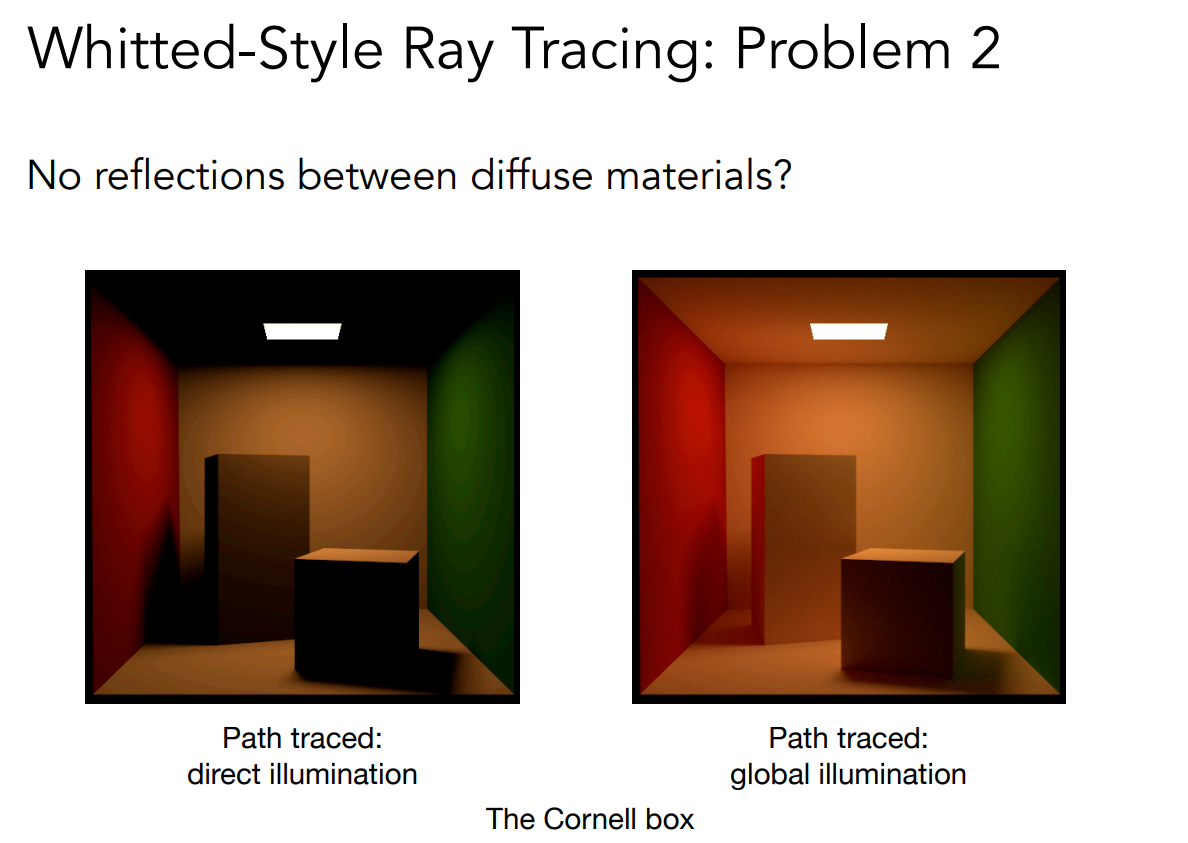
Whitted-Style Ray Tracing: Problem 2
- 对于 Whitted-Style Ray Tracing, No reflections between diffuse materials
- 体现在接触不到光的漫反射面反射出了接触到光的红色面的光 (color bleeding)
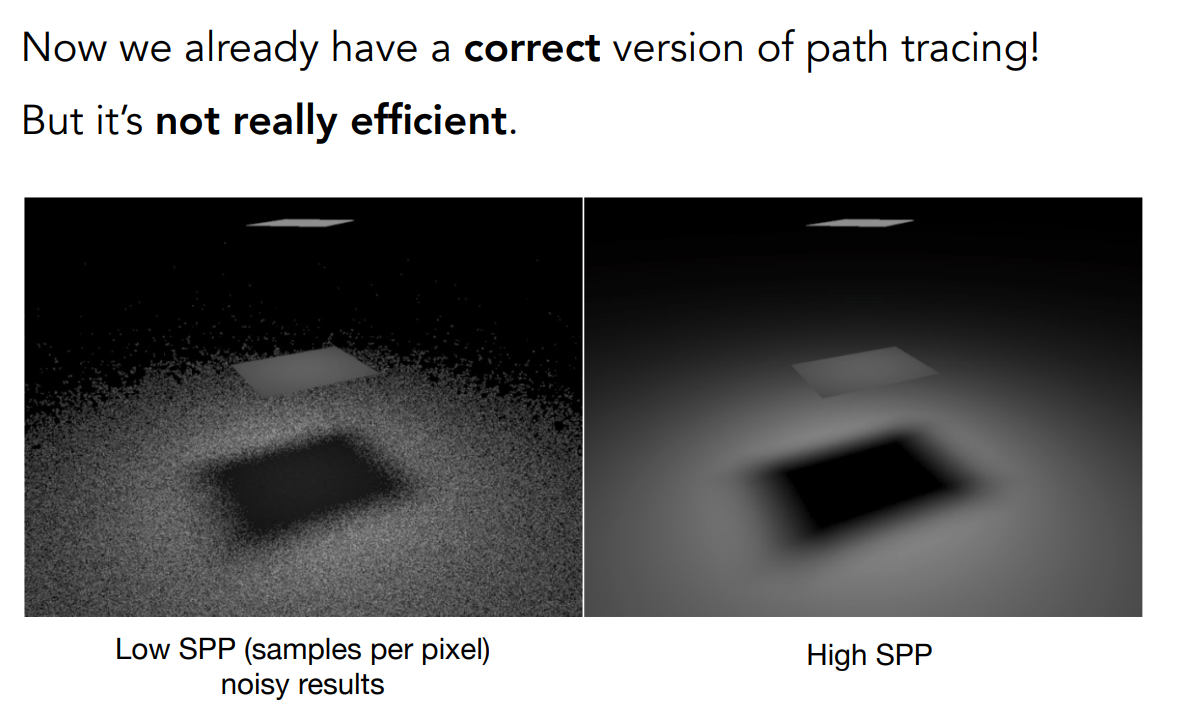
Problem Summary: Whitted-Style Ray Tracing is Wrong
But the rendering equation is correct
L
o
(
p
,
ω
o
)
=
L
e
(
p
,
ω
o
)
+
∫
Ω
+
L
i
(
p
,
ω
i
)
f
r
(
p
,
ω
i
,
ω
o
)
(
n
⋅
ω
i
)
d
ω
i
L_o\left(p, \omega_o\right)=L_e\left(p, \omega_o\right)+\int_{\Omega^{+}} L_i\left(p, \omega_i\right) f_r\left(p, \omega_i, \omega_o\right)\left(n \cdot \omega_i\right) \mathrm{d} \omega_i
Lo(p,ωo)=Le(p,ωo)+∫Ω+Li(p,ωi)fr(p,ωi,ωo)(n⋅ωi)dωi
But it involves
- Solving an integral over the hemisphere, and
- Recursive execution
A Simple Monte Carlo Solution
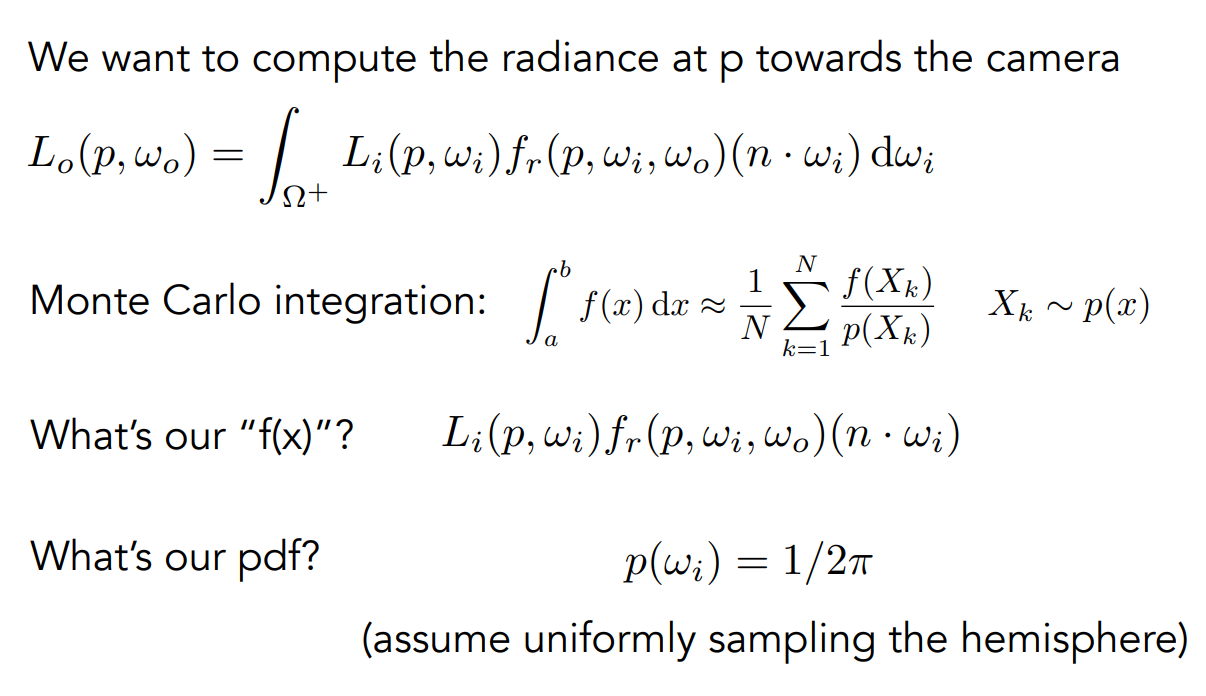
因此,对于着色点
p
p
p 的 Monte Carlo Integration 为
L
o
(
p
,
ω
o
)
=
∫
Ω
+
L
i
(
p
,
ω
i
)
f
r
(
p
,
ω
i
,
ω
o
)
(
n
⋅
ω
i
)
d
ω
i
≈
1
N
∑
i
=
1
N
L
i
(
p
,
ω
i
)
f
r
(
p
,
ω
i
,
ω
o
)
(
n
⋅
ω
i
)
p
(
ω
i
)
\begin{aligned} L_o\left(p, \omega_o\right) &=\int_{\Omega^{+}} L_i\left(p, \omega_i\right) f_r\left(p, \omega_i, \omega_o\right)\left(n \cdot \omega_i\right) \mathrm{d} \omega_i \\ & \approx \frac{1}{N} \sum_{i=1}^N \frac{L_i\left(p, \omega_i\right) f_r\left(p, \omega_i, \omega_o\right)\left(n \cdot \omega_i\right)}{p\left(\omega_i\right)} \end{aligned}
Lo(p,ωo)=∫Ω+Li(p,ωi)fr(p,ωi,ωo)(n⋅ωi)dωi≈N1i=1∑Np(ωi)Li(p,ωi)fr(p,ωi,ωo)(n⋅ωi)
shade(p, wo)
Randomly choose N directions wi~pdf
Lo = 0.0
For each wi
Trace a ray r(p, wi)
If ray r hit the light
Lo += (1 / N) * L_i * f_r * cosine / pdf(wi)
Return Lo
Introducing Global Illumination
Naive Algorithm
- 考虑物体反射过来的光线,如果打到物体,就递归计算
shade(p, wo)
Randomly choose N directions wi~pdf
Lo = 0.0
For each wi
Trace a ray r(p, wi)
If ray r hit the light
Lo += (1 / N) * L_i * f_r * cosine / pdf(wi)
Else If ray r hit an object at q
Lo += (1 / N) * shade(q, -wi) * f_r * cosine / pdf(wi)
Return Lo
Problem #1: Explosion of #rays as #bounces go up - let N = 1!
- 光线仅仅弹射两次的话数量级就已经不可以接受了
- Key observation: #rays will not explode iff
N
=
1
N = 1
N=1
- 当使用 N = 1 N = 1 N=1 进行 Monte Carlo Integration 时 → \to → 路径追踪 (path tracing)
- 当使用 N ≠ 1 N \ne 1 N=1 进行 Monte Carlo Integration 时 → \to → 分布式光线追踪
- 使用 N = 1 N = 1 N=1 进行 Monte Carlo Integration 噪声很大,但只要使用多个路径穿过一个像素对它们求平均即可
修改刚刚的算法
shade(p, wo)
Randomly choose ONE direction wi~pdf(w)
Trace a ray r(p, wi)
If ray r hit the light
Return L_i * f_r * cosine / pdf(wi)
Else If ray r hit an object at q
Return shade(q, -wi) * f_r * cosine / pdf(wi)
ray_generation(camPos, pixel)
Uniformly choose N sample positions within the pixel
pixel_radiance = 0.0
For each sample in the pixel
Shoot a ray r(camPos, cam_to_sample)
If ray r hit the scene at p
pixel_radiance += 1 / N * shade(p, sample_to_cam)
Return pixel_radiance
Problem #2: The recursive algorithm will never stop - Russian Roulette!
- 但是在真实世界中,光线是不会停止弹射的,限制弹射次数并不合理,因为对于弹射次数的削减相当于直接削减了能量,这违背了能量守恒定律
- Solution: Russian Roulette (RR) (俄罗斯轮盘赌)
- 在一定的概率下停止追踪,方法如下
- 假设得到的理想追踪结果为 L o L_o Lo
- 人工设定一个概率 P ( 0 < P < 1 ) P\ (0 < P < 1) P (0<P<1)
- 以概率 P P P shoot a ray,返回 the shading result divided by P : L o / P P: L_o/ P P:Lo/P
- 以概率 1 − P 1-P 1−P shoot a ray,返回 the shading result is 0 0 0
- 在这种情况下的期望 E = P × ( L o / P ) + ( 1 − P ) × 0 = L o E= P \times (L_o / P) + (1 - P) \times 0 = L_o E=P×(Lo/P)+(1−P)×0=Lo
- 在一定的概率下停止追踪,方法如下
代码如下
shade(p, wo)
Manually specify a probability P_RR
Randomly select ksi in a uniform dist. in [0, 1]
If (ksi > P_RR) return 0.0;
Randomly choose ONE direction wi~pdf(w)
Trace a ray r(p, wi)
If ray r hit the light
Return L_i * f_r * cosine / pdf(wi) / P_RR
Else If ray r hit an object at q
Return shade(q, -wi) * f_r * cosine / pdf(wi) / P_RR
Problems of Path Tracing
Problem #1: Not very efficient
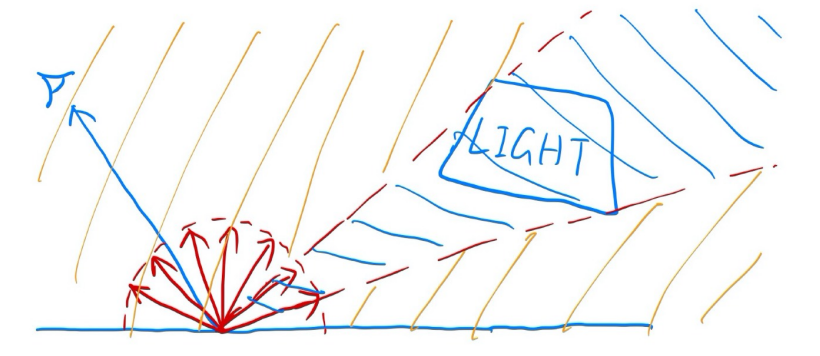
浪费现象产生的原因是我们均匀的在半球上采样,很大一部分采样没有进入光源,如果找到一个好的概率密度函数,可以提高效率 → \to → 直接在光源上进行采样

Solution #1: Sampling the Light (pure math)

-
Assume uniformly sampling on the light: pdf = 1 / A \text{pdf} = 1 / A pdf=1/A (because ∫ pdf d A = 1 \int \text{pdf} \ \mathrm{d}A = 1 ∫pdf dA=1)
-
But the rendering equation integrates on the solid angle: L o = ∫ L i f r c o s d ω . L_o = \int L_i fr cos \ \mathrm{d} \omega. Lo=∫Lifrcos dω.
-
Recall Monte Carlo Integration: Sample on x x x & integrate on x x x
-
we sample on the light, so we must integrate on the light
-
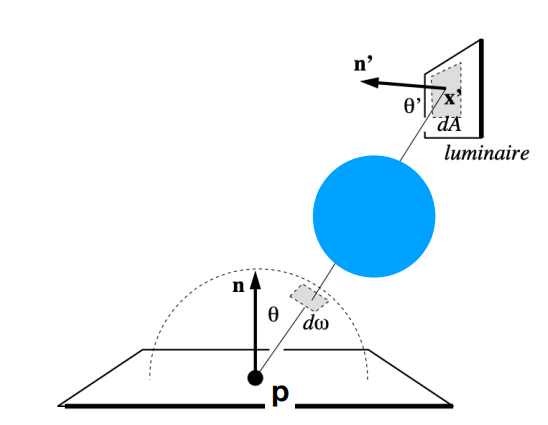
我们只要知道 d ω \mathrm{d} \omega dω 和 d A \mathrm{d}A dA 的关系即可
- Recall the alternative def. of solid angle: Projected area on the unit sphere
- 将 d A \mathrm{d}A dA 往单位球上投影即可 ( d A cos θ ′ \mathrm{d} A \cos \theta^{\prime} dAcosθ′ 就是把面转到朝向中心的方向,根据立体角的定义来理解下面的式子)
d ω = d A cos θ ′ ∥ x ′ − x ∥ 2 \mathrm{d} \omega=\frac{\mathrm{d} A \cos \theta^{\prime}}{\left\|x^{\prime}-x\right\|^2} dω=∥x′−x∥2dAcosθ′
-
-
我们重写渲染方程即可(变量替换,改变积分域)
L o ( x , ω o ) = ∫ Ω + L i ( x , ω i ) f r ( x , ω i , ω o ) cos θ d ω i = ∫ A L i ( x , ω i ) f r ( x , ω i , ω o ) cos θ cos θ ′ ∥ x ′ − x ∥ 2 d A \begin{aligned} L_o\left(x, \omega_o\right) &=\int_{\Omega^{+}} L_i\left(x, \omega_i\right) f_r\left(x, \omega_i, \omega_o\right) \cos \theta \mathrm{d} \omega_i \\ &=\int_A L_i\left(x, \omega_i\right) f_r\left(x, \omega_i, \omega_o\right) \frac{\cos \theta \cos \theta^{\prime}}{\left\|x^{\prime}-x\right\|^2} \mathrm{~d} A \end{aligned} Lo(x,ωo)=∫Ω+Li(x,ωi)fr(x,ωi,ωo)cosθdωi=∫ALi(x,ωi)fr(x,ωi,ωo)∥x′−x∥2cosθcosθ′ dA
Previously, we assume the light is “accidentally” shot by uniform hemisphere sampling
Now we consider the radiance coming from two parts:
- light source (colored blue, direct, no need to have RR)
- other reflectors (colored orange, indirect, RR)
- 代码如下(拆分直接光照和间接光照)
shade(p, wo)
# Contribution from the light source.
Uniformly sample the light at x’ (pdf_light = 1 / A)
L_dir = L_i * f_r * cos θ * cos θ’ / |x’ - p|^2 / pdf_light
# Contribution from other reflectors.
L_indir = 0.0
Test Russian Roulette with probability P_RR
Uniformly sample the hemisphere toward wi (pdf_hemi = 1 / 2pi)
Trace a ray r(p, wi)
If ray r hit a non-emitting object at q
L_indir = shade(q, -wi) * f_r * cos θ / pdf_hemi / P_RR
Return L_dir + L_indir
Problem #2: Light is not blocked or not
- 在之前的计算中,假设了光线不会被挡到
Solution #2: Give a ray from P
- 考虑点 p p p 到 x ′ x' x′ 的连线,从 p p p 点打一根光线,看看有没有被挡到
# Contribution from the light source.
L_dir = 0.0
Uniformly sample the light at x’ (pdf_light = 1 / A)
Shoot a ray from p to x’
If the ray is not blocked in the middle
L_dir = …
Some Side Notes
-
Previous
- Ray tracing == Whitted-style ray tracing
-
Modern (my own definition)
- The general solution of light transport, including
- (Unidirectional & bidirectional) path tracing
- Photon mapping
- Metropolis light transport - VCM / UPBP…
-
Uniformly sampling the hemisphere
- How? And in general, how to sample any function? (sampling)
-
Monte Carlo integration allows arbitrary pdfs
- What’s the best choice? (importance sampling)
- 重要性采样:针对某一种特定形状进行采样
-
Do random numbers matter?
- Yes! (low discrepancy sequences)
-
I can sample the hemisphere and the light
- Can I combine them? Yes! (multiple imp. sampling)
- 结合从半球和光源的采样方法
-
The radiance of a pixel is the average of radiance on all paths passing through it
- Why? (pixel reconstruction filter)
-
Is the radiance of a pixel the color of a pixel?
- No. (gamma correction, curves, color space)










![[Linux] 如何查看内核 Kernel 版本(查多个Kernel的方法)](https://img-blog.csdnimg.cn/bca860ba942e46f2a937c7845c085b72.png)