一、Camera
1.1、结合SurfaceView实现预览
1.1.1、布局
<?xml version="1.0" encoding="utf-8"?>
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:app="http://schemas.android.com/apk/res-auto"
xmlns:tools="http://schemas.android.com/tools"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical"
tools:context=".CameraActivity">
<SurfaceView
android:id="@+id/preview"
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="1"/>
</LinearLayout>
1.1.2、实现预览
mBinding.preview.getHolder().addCallback(new SurfaceHolder.Callback2() {
@Override
public void surfaceRedrawNeeded(@NonNull SurfaceHolder holder) {
mCamera = Camera.open();
try {
mCamera.setPreviewDisplay(holder);
mCamera.startPreview();
} catch (IOException e) {
throw new RuntimeException(e);
}
}
@Override
public void surfaceCreated(@NonNull SurfaceHolder holder) {
}
@Override
public void surfaceChanged(@NonNull SurfaceHolder holder, int format, int width, int height) {
}
@Override
public void surfaceDestroyed(@NonNull SurfaceHolder holder) {
}
});
- Camera.open()
打开摄像头 - setPreviewDisplay
设置预览展示的控件 - startPreview
开始预览

发现预览是横着的,需要使用setDisplayOrientation调整预览图像的方向
1.1.3、获取摄像头的原始数据
mBinding.preview.getHolder().addCallback(new SurfaceHolder.Callback2() {
@Override
public void surfaceRedrawNeeded(@NonNull SurfaceHolder holder) {
mCamera = Camera.open();
try {
mCamera.setPreviewDisplay(holder);
mCamera.setDisplayOrientation(90);
mCamera.setPreviewCallback(new PreviewCallBack());
mCamera.startPreview();
} catch (IOException e) {
throw new RuntimeException(e);
}
}
@Override
public void surfaceCreated(@NonNull SurfaceHolder holder) {
}
@Override
public void surfaceChanged(@NonNull SurfaceHolder holder, int format, int width, int height) {
}
@Override
public void surfaceDestroyed(@NonNull SurfaceHolder holder) {
}
});
private class PreviewCallBack implements Camera.PreviewCallback {
@Override
public void onPreviewFrame(byte[] data, Camera camera) {
try {
bos.write(data);
Camera.Size previewSize = camera.getParameters().getPreviewSize();
Log.e(TAG, "onPreviewFrame:" + previewSize.width + "x" + previewSize.height);
Log.e(TAG, "Image format:" + camera.getParameters().getPictureFormat());
} catch (IOException e) {
throw new RuntimeException(e);
}
}
}


- setPreviewCallback
设置预览数据的回调 - 2560*1440
默认返回图像的分辨率 - Image format:256
默认返回图像的数据格式是JPEG的
1.1.4、调整相机数据的分辨率和格式
Parameters
private Camera.Size getBestPreviewSize(Camera.Parameters parameters, int desiredWidth, int desiredHeight) {
List<Camera.Size> supportedSizes = parameters.getSupportedPreviewSizes();
Camera.Size bestSize = null;
int bestDiff = Integer.MAX_VALUE;
for (Camera.Size size : supportedSizes) {
int diff = Math.abs(size.width - desiredWidth) + Math.abs(size.height - desiredHeight);
if (diff < bestDiff) {
bestSize = size;
bestDiff = diff;
}
}
return bestSize;
}
mCamera = Camera.open();
try {
mCamera.setPreviewDisplay(holder);
Camera.Parameters parameters = mCamera.getParameters();
// 设置预览尺寸
int desiredWidth = 1280; // 设置所需的宽度
int desiredHeight = 720; // 设置所需的高度
Camera.Size bestSize = getBestPreviewSize(parameters, desiredWidth, desiredHeight);
parameters.setPreviewSize(bestSize.width, bestSize.height);
parameters.setFocusMode(Camera.Parameters.FOCUS_MODE_AUTO);
//设置输出数据的格式为NV21
parameters.setPictureFormat(ImageFormat.NV21);
mCamera.setParameters(parameters);
mCamera.setPreviewCallback(new PreviewCallBack());
mCamera.setDisplayOrientation(90);
mCamera.startPreview();
} catch (IOException e) {
throw new RuntimeException(e);
}

ImageFormat里面还定义的有YUV_420_888(yuv420)、YV12,那我们可以使用吗?
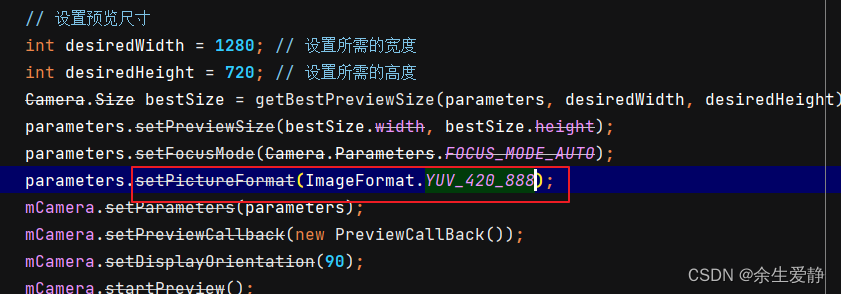

运行后,应用直接抛出异常了,我用的真机是VIVO x20的,android版本是8.1的,所以,不支持设置输出的摄像头数据为YUV_420_888的。
1.1.5、保存摄像头输出的nv21格式的数据
package com.aniljing.androidcamera;
import android.content.Context;
import android.graphics.ImageFormat;
import android.hardware.Camera;
import android.os.Bundle;
import android.os.Environment;
import android.util.Log;
import android.view.SurfaceHolder;
import com.aniljing.androidcamera.databinding.ActivityCameraBinding;
import java.io.BufferedOutputStream;
import java.io.File;
import java.io.FileNotFoundException;
import java.io.FileOutputStream;
import java.io.IOException;
import java.util.List;
import androidx.annotation.NonNull;
import androidx.appcompat.app.AppCompatActivity;
public class CameraActivity extends AppCompatActivity {
private final String TAG = CameraActivity.class.getSimpleName();
private Context mContext;
private ActivityCameraBinding mBinding;
private Camera mCamera;
private File mFile = new File(Environment.getExternalStorageDirectory(), "nv21.yuv");
private BufferedOutputStream bos;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
mContext = this;
mBinding = ActivityCameraBinding.inflate(getLayoutInflater());
setContentView(mBinding.getRoot());
try {
if (mFile.exists()) {
mFile.delete();
}
bos = new BufferedOutputStream(new FileOutputStream(mFile));
} catch (FileNotFoundException e) {
throw new RuntimeException(e);
}
mBinding.preview.getHolder().addCallback(new SurfaceHolder.Callback2() {
@Override
public void surfaceRedrawNeeded(@NonNull SurfaceHolder holder) {
mCamera = Camera.open();
try {
mCamera.setPreviewDisplay(holder);
Camera.Parameters parameters = mCamera.getParameters();
// 设置预览尺寸
int desiredWidth = 1280; // 设置所需的宽度
int desiredHeight = 720; // 设置所需的高度
Camera.Size bestSize = getBestPreviewSize(parameters, desiredWidth, desiredHeight);
parameters.setPreviewSize(bestSize.width, bestSize.height);
parameters.setFocusMode(Camera.Parameters.FOCUS_MODE_AUTO);
parameters.setPictureFormat(ImageFormat.NV21);
mCamera.setParameters(parameters);
mCamera.setPreviewCallback(new PreviewCallBack());
mCamera.setDisplayOrientation(90);
mCamera.startPreview();
} catch (IOException e) {
throw new RuntimeException(e);
}
}
@Override
public void surfaceCreated(@NonNull SurfaceHolder holder) {
}
@Override
public void surfaceChanged(@NonNull SurfaceHolder holder, int format, int width, int height) {
}
@Override
public void surfaceDestroyed(@NonNull SurfaceHolder holder) {
}
});
}
private class PreviewCallBack implements Camera.PreviewCallback {
@Override
public void onPreviewFrame(byte[] data, Camera camera) {
try {
bos.write(data);
Camera.Size previewSize = camera.getParameters().getPreviewSize();
Log.e(TAG, "onPreviewFrame:" + previewSize.width + "x" + previewSize.height);
Log.e(TAG,"Image format:"+camera.getParameters().getPictureFormat());
} catch (IOException e) {
throw new RuntimeException(e);
}
}
}
@Override
protected void onDestroy() {
super.onDestroy();
mCamera.setPreviewCallback(null);
mCamera.stopPreview();
mCamera.release();
mCamera = null;
try {
bos.flush();
bos.close();
bos = null;
} catch (IOException e) {
throw new RuntimeException(e);
}
}
private Camera.Size getBestPreviewSize(Camera.Parameters parameters, int desiredWidth, int desiredHeight) {
List<Camera.Size> supportedSizes = parameters.getSupportedPreviewSizes();
Camera.Size bestSize = null;
int bestDiff = Integer.MAX_VALUE;
for (Camera.Size size : supportedSizes) {
int diff = Math.abs(size.width - desiredWidth) + Math.abs(size.height - desiredHeight);
if (diff < bestDiff) {
bestSize = size;
bestDiff = diff;
}
}
return bestSize;
}
}
-
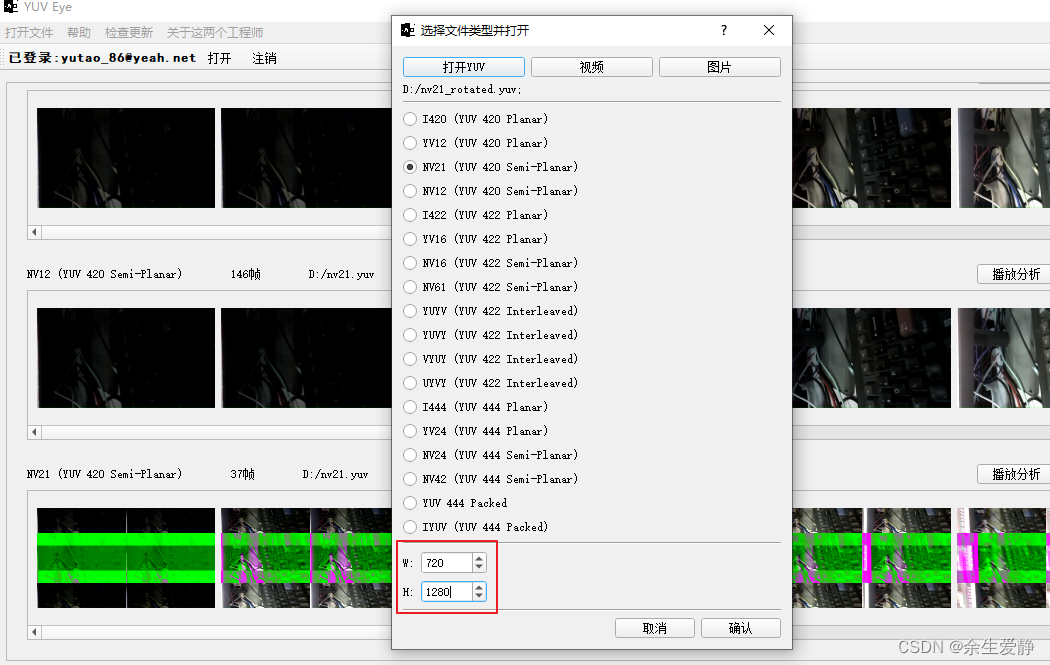
保存为yuv格式的文件
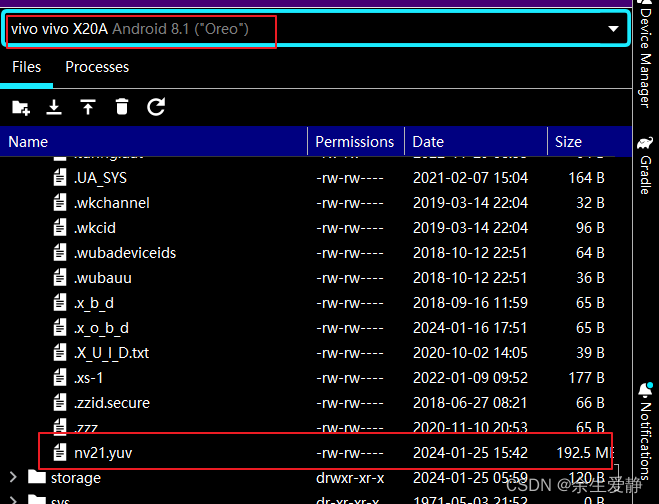
-
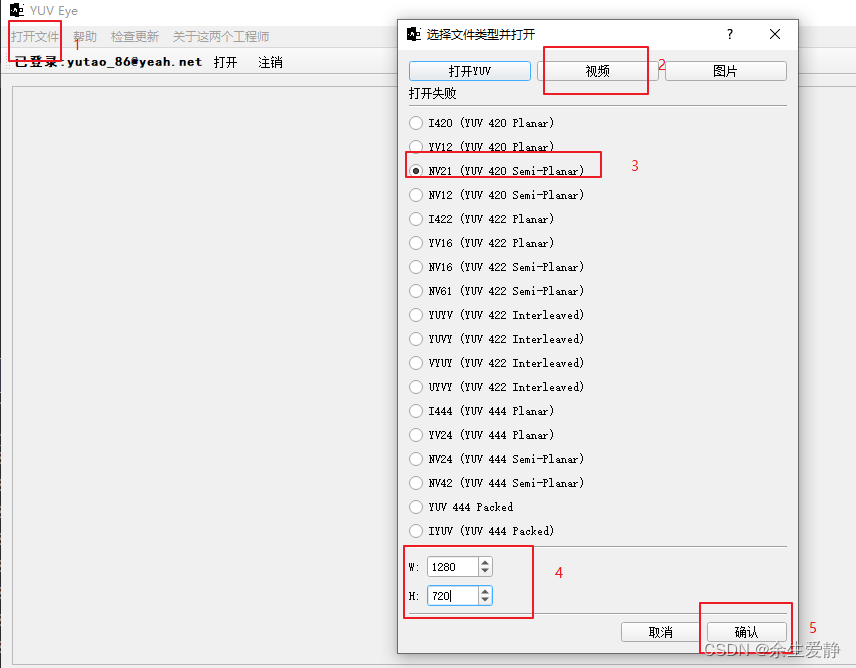
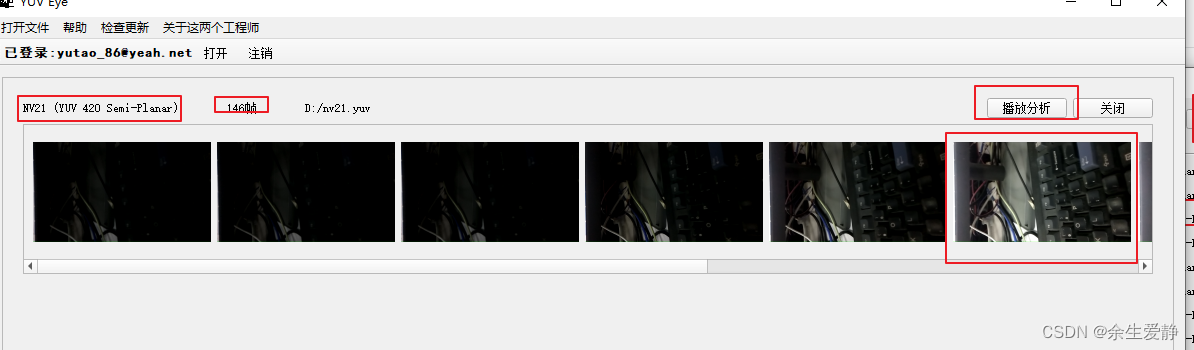
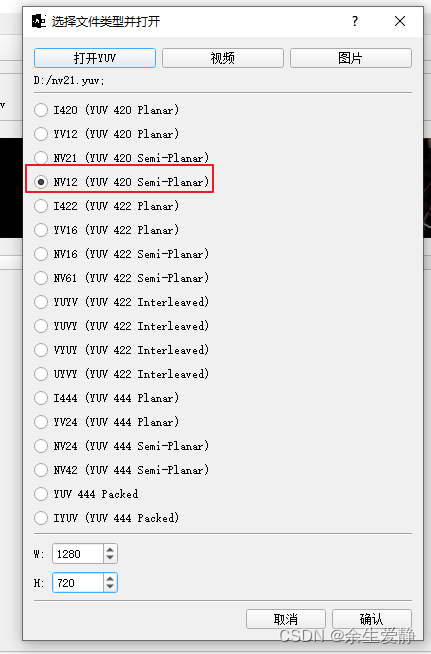
使用YuvEye工具打开nv21.yuv文件
-
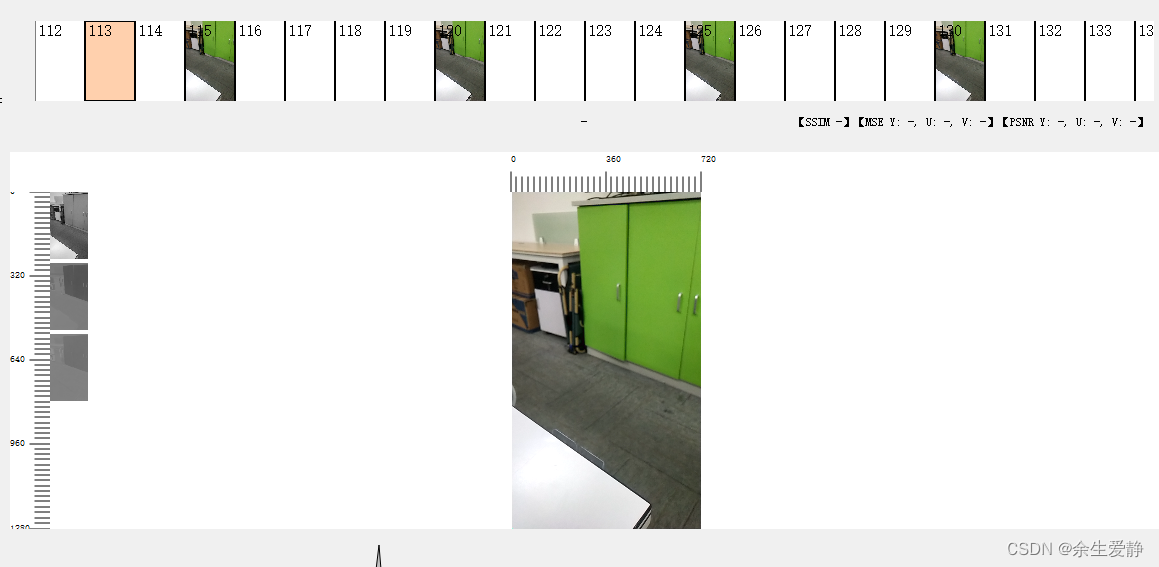
可以看出,虽然预览已经可以竖屏显示视频了,但是我们实际保存的数据却还是横屏的,所以就需要我们手动的调整
-
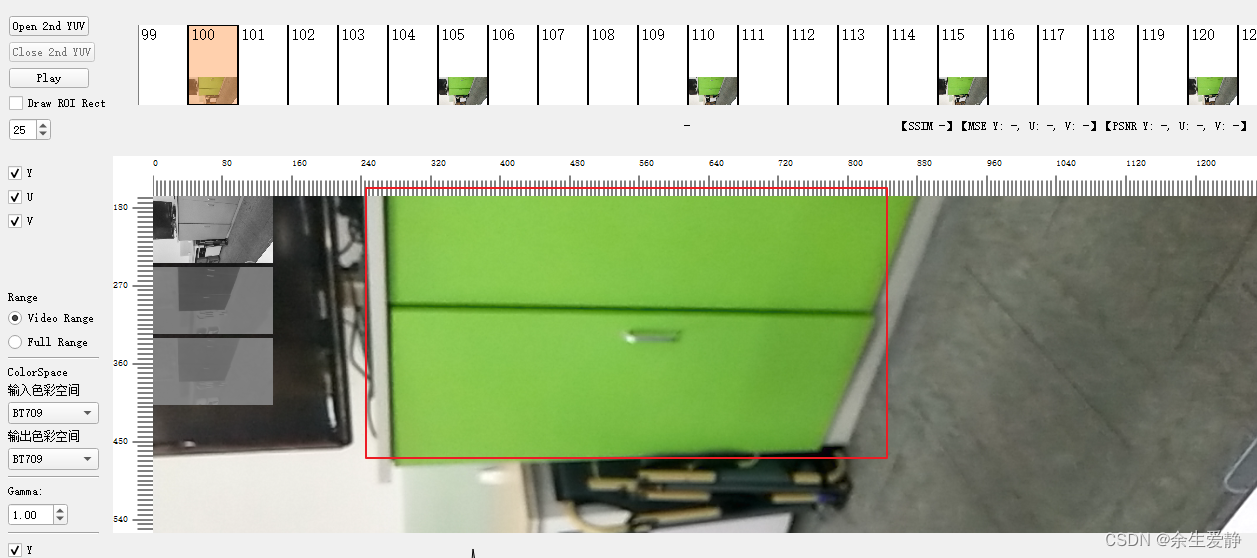
如果我们选择其他格式的,使用工具是否能够正常打开呢?
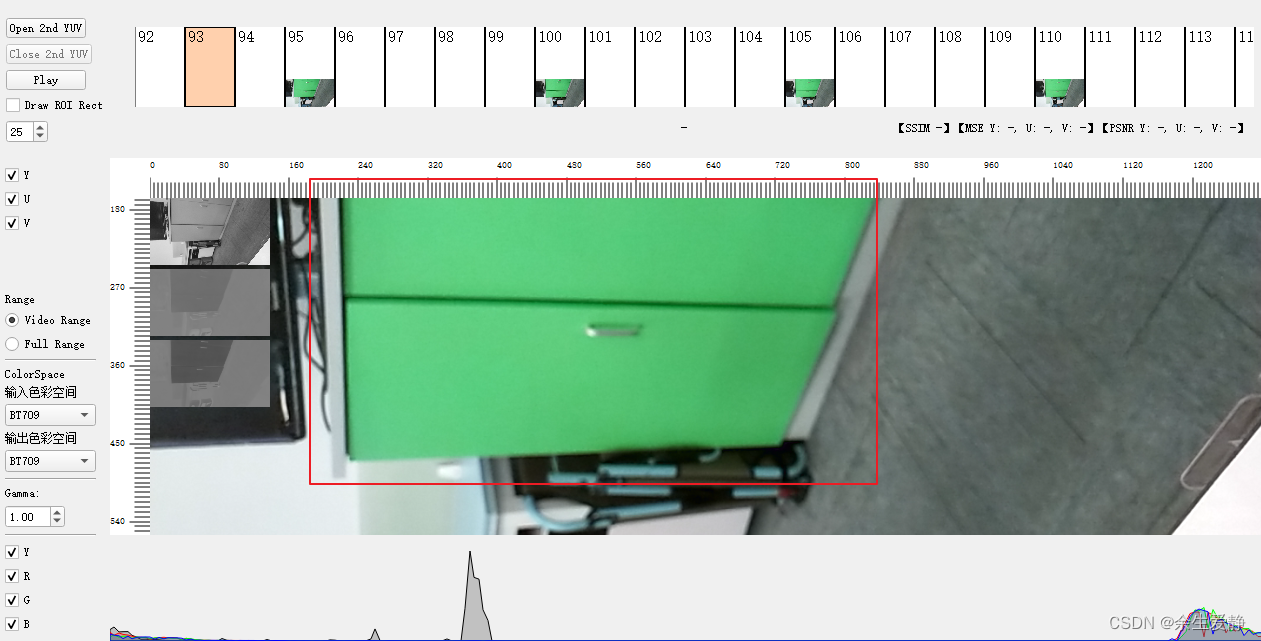
我们会发现,柜子的颜色和使用正确的格式有很明显的差别的 -
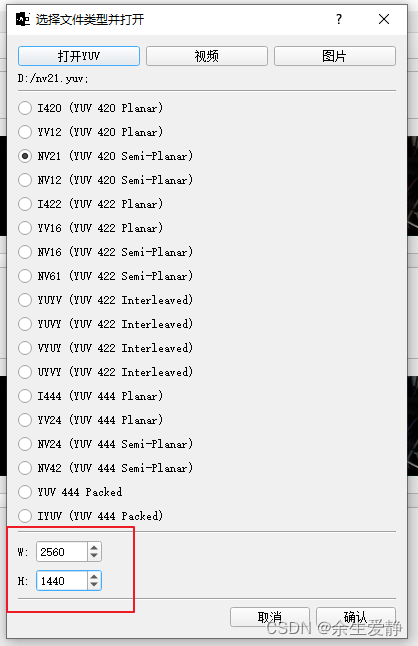
如果我们输入错误的分辨率,又是什么效果呢?

1.1.6、数据旋转
java方式:
private void nv21_rotate_to_90(byte[] nv21_data, byte[] nv21_rotated, int width, int height) {
int y_size = width * height;
int buffser_size = y_size * 3 / 2;
// Rotate the Y luma
int i = 0;
int startPos = (height - 1) * width;
for (int x = 0; x < width; x++) {
int offset = startPos;
for (int y = height - 1; y >= 0; y--) {
nv21_rotated[i] = nv21_data[offset + x];
i++;
offset -= width;
}
}
// Rotate the U and V color components
i = buffser_size - 1;
for (int x = width - 1; x > 0; x = x - 2) {
int offset = y_size;
for (int y = 0; y < height / 2; y++) {
nv21_rotated[i] = nv21_data[offset + x];
i--;
nv21_rotated[i] = nv21_data[offset + (x - 1)];
i--;
offset += width;
}
}
}
package com.aniljing.androidcamera;
import android.content.Context;
import android.graphics.ImageFormat;
import android.hardware.Camera;
import android.os.Bundle;
import android.os.Environment;
import android.util.Log;
import android.view.SurfaceHolder;
import com.aniljing.androidcamera.databinding.ActivityCameraBinding;
import java.io.BufferedOutputStream;
import java.io.File;
import java.io.FileNotFoundException;
import java.io.FileOutputStream;
import java.io.IOException;
import java.util.List;
import androidx.annotation.NonNull;
import androidx.appcompat.app.AppCompatActivity;
public class CameraActivity extends AppCompatActivity {
private final String TAG = CameraActivity.class.getSimpleName();
private Context mContext;
private ActivityCameraBinding mBinding;
private Camera mCamera;
private File mFile = new File(Environment.getExternalStorageDirectory(), "nv21_rotated.yuv");
private BufferedOutputStream bos;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
mContext = this;
mBinding = ActivityCameraBinding.inflate(getLayoutInflater());
setContentView(mBinding.getRoot());
try {
if (mFile.exists()) {
mFile.delete();
}
bos = new BufferedOutputStream(new FileOutputStream(mFile));
} catch (FileNotFoundException e) {
throw new RuntimeException(e);
}
mBinding.preview.getHolder().addCallback(new SurfaceHolder.Callback2() {
@Override
public void surfaceRedrawNeeded(@NonNull SurfaceHolder holder) {
mCamera = Camera.open();
try {
mCamera.setPreviewDisplay(holder);
Camera.Parameters parameters = mCamera.getParameters();
// 设置预览尺寸
int desiredWidth = 1280; // 设置所需的宽度
int desiredHeight = 720; // 设置所需的高度
Camera.Size bestSize = getBestPreviewSize(parameters, desiredWidth, desiredHeight);
parameters.setPreviewSize(bestSize.width, bestSize.height);
parameters.setFocusMode(Camera.Parameters.FOCUS_MODE_AUTO);
parameters.setPictureFormat(ImageFormat.NV21);
mCamera.setParameters(parameters);
mCamera.setPreviewCallback(new PreviewCallBack());
mCamera.setDisplayOrientation(90);
mCamera.startPreview();
} catch (IOException e) {
throw new RuntimeException(e);
}
}
@Override
public void surfaceCreated(@NonNull SurfaceHolder holder) {
}
@Override
public void surfaceChanged(@NonNull SurfaceHolder holder, int format, int width, int height) {
}
@Override
public void surfaceDestroyed(@NonNull SurfaceHolder holder) {
}
});
}
private class PreviewCallBack implements Camera.PreviewCallback {
@Override
public void onPreviewFrame(byte[] data, Camera camera) {
try {
Camera.Size previewSize = camera.getParameters().getPreviewSize();
byte[] nv21_rotated=new byte[data.length];
nv21_rotate_to_90(data,nv21_rotated, previewSize.width, previewSize.height);
bos.write(nv21_rotated);
Log.e(TAG, "onPreviewFrame:" + previewSize.width + "x" + previewSize.height);
Log.e(TAG,"Image format:"+camera.getParameters().getPictureFormat());
} catch (IOException e) {
throw new RuntimeException(e);
}
}
}
@Override
protected void onDestroy() {
super.onDestroy();
mCamera.setPreviewCallback(null);
mCamera.stopPreview();
mCamera.release();
mCamera = null;
try {
bos.flush();
bos.close();
bos = null;
} catch (IOException e) {
throw new RuntimeException(e);
}
}
private Camera.Size getBestPreviewSize(Camera.Parameters parameters, int desiredWidth, int desiredHeight) {
List<Camera.Size> supportedSizes = parameters.getSupportedPreviewSizes();
Camera.Size bestSize = null;
int bestDiff = Integer.MAX_VALUE;
for (Camera.Size size : supportedSizes) {
int diff = Math.abs(size.width - desiredWidth) + Math.abs(size.height - desiredHeight);
if (diff < bestDiff) {
bestSize = size;
bestDiff = diff;
}
}
return bestSize;
}
private void nv21_rotate_to_90(byte[] nv21_data, byte[] nv21_rotated, int width, int height) {
int y_size = width * height;
int buffser_size = y_size * 3 / 2;
// Rotate the Y luma
int i = 0;
int startPos = (height - 1) * width;
for (int x = 0; x < width; x++) {
int offset = startPos;
for (int y = height - 1; y >= 0; y--) {
nv21_rotated[i] = nv21_data[offset + x];
i++;
offset -= width;
}
}
// Rotate the U and V color components
i = buffser_size - 1;
for (int x = width - 1; x > 0; x = x - 2) {
int offset = y_size;
for (int y = 0; y < height / 2; y++) {
nv21_rotated[i] = nv21_data[offset + x];
i--;
nv21_rotated[i] = nv21_data[offset + (x - 1)];
i--;
offset += width;
}
}
}
}
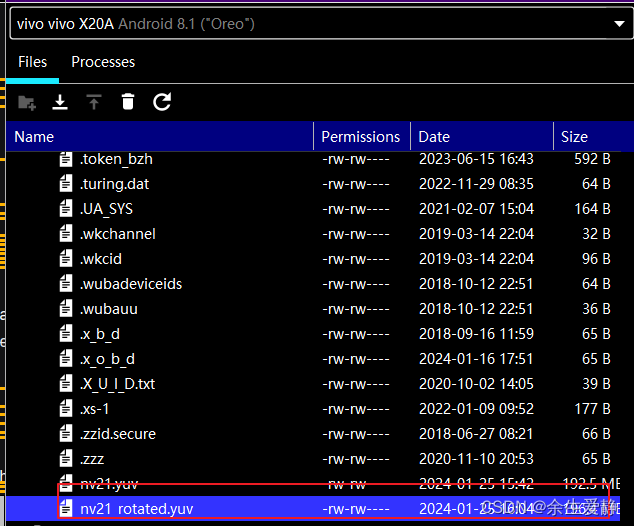
- 因为我们对数据进行了顺时针旋转了90度,所以,旋转后的图像数据的宽高也会发生颠倒
libYuv库(使用ubuntu编译libyuv库可以参考http://t.csdnimg.cn/W24Pr):
CMakeLists.txt
cmake_minimum_required(VERSION 3.22.1)
project("androidcamera")
#声明头文件路径
set(INCLUDE_DIR ${CMAKE_SOURCE_DIR}/../jniLibs/include)
#声明库文件路径
set(LIB_DIR ${CMAKE_SOURCE_DIR}/../jniLibs/lib)
#libYuv
set(YUV_LIB yuv)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -L${LIB_DIR}/${ANDROID_ABI} -std=gnu++11")
#设置头文件
include_directories(${INCLUDE_DIR})
add_library(${CMAKE_PROJECT_NAME} SHARED
native-lib.cpp
YuvUtil.cpp)
target_link_libraries(${CMAKE_PROJECT_NAME}
#链接yuv库
${YUV_LIB}
android
log)
YuvUtil.h
//
// Created by company on 2024-01-25.
//
#ifndef ANDROIDCAMERA_YUVUTIL_H
#define ANDROIDCAMERA_YUVUTIL_H
#include <jni.h>
#include <libyuv.h>
void nv21ToI420(jbyte *src_nv21_data,jint width,jint height,jbyte* dst_i420_data);
/**
* i420旋转
* @param src_i420_data
* @param width
* @param height
* @param dst_i420_data
* @param degree
*/
void rotateI420(jbyte*src_i420_data,jint width,jint height,jbyte*dst_i420_data,jint degree);
#endif //ANDROIDCAMERA_YUVUTIL_H
YuvUtil.cpp
//
// Created by company on 2024-01-25.
//
#include "YuvUtil.h"
void nv21ToI420(jbyte *src_nv21_data, jint width, jint height, jbyte *dst_i420_data) {
jint src_y_size = width * height;
jint src_u_size = (width >> 1) * (height >> 1);
jbyte *src_nv21_y_data = src_nv21_data;
jbyte *src_nv21_vu_data = src_nv21_data + src_y_size;
jbyte *dst_i420_y_data = dst_i420_data;
jbyte *dst_i420_u_data = dst_i420_data + src_y_size;
jbyte *dst_i420_v_data = dst_i420_data + src_y_size + src_u_size;
libyuv::NV21ToI420((const uint8_t *) src_nv21_y_data, width,
(const uint8_t *) src_nv21_vu_data, width,
(uint8_t *) dst_i420_y_data, width,
(uint8_t *) dst_i420_u_data, width >> 1,
(uint8_t *) dst_i420_v_data, width >> 1,
width, height);
}
void rotateI420(jbyte *src_i420_data, jint width, jint height, jbyte *dst_i420_data, jint degree) {
jint src_i420_y_size = width * height;
jint src_i420_u_size = (width >> 1) * (height >> 1);
jbyte *src_i420_y_data = src_i420_data;
jbyte *src_i420_u_data = src_i420_data + src_i420_y_size;
jbyte *src_i420_v_data = src_i420_data + src_i420_y_size + src_i420_u_size;
jbyte *dst_i420_y_data = dst_i420_data;
jbyte *dst_i420_u_data = dst_i420_data + src_i420_y_size;
jbyte *dst_i420_v_data = dst_i420_data + src_i420_y_size + src_i420_u_size;
if (degree == libyuv::kRotate90 || degree == libyuv::kRotate270) {
//90或270的width和height在旋转后是相反的
libyuv::I420Rotate((const uint8_t *) src_i420_y_data, width,
(const uint8_t *) src_i420_u_data, width >> 1,
(const uint8_t *) src_i420_v_data, width >> 1,
(uint8_t *) dst_i420_y_data, height,
(uint8_t *) dst_i420_u_data, height >> 1,
(uint8_t *) dst_i420_v_data, height >> 1,
width, height, (libyuv::RotationMode) degree);
} else {
libyuv::I420Rotate((const uint8_t *) src_i420_y_data, width,
(const uint8_t *) src_i420_u_data, width >> 1,
(const uint8_t *) src_i420_v_data, width >> 1,
(uint8_t *) dst_i420_y_data, width,
(uint8_t *) dst_i420_u_data, width >> 1,
(uint8_t *) dst_i420_v_data, width >> 1,
width, height, (libyuv::RotationMode) degree);
}
}
native-lib.cpp
#include <jni.h>
#include <string>
#include "YuvUtil.h"
extern "C"
JNIEXPORT void JNICALL
Java_com_aniljing_androidcamera_YuvUtil_nv21ToI420(JNIEnv *env, jobject thiz,
jbyteArray src_nv21_array, jint width,
jint height, jbyteArray dst_i420_array) {
jbyte *src_nv21_data = env->GetByteArrayElements(src_nv21_array, JNI_FALSE);
jbyte *dst_i420_data = env->GetByteArrayElements(dst_i420_array, JNI_FALSE);
nv21ToI420(src_nv21_data, width, height, dst_i420_data);
env->ReleaseByteArrayElements(src_nv21_array, src_nv21_data, 0);
env->ReleaseByteArrayElements(dst_i420_array, dst_i420_data, 0);
}
extern "C"
JNIEXPORT void JNICALL
Java_com_aniljing_androidcamera_YuvUtil_i420Rotate(JNIEnv *env, jobject thiz,
jbyteArray src_i420_array, jint width,
jint height, jbyteArray dst_i420_array,
jint degree) {
jbyte *src_i420_data = env->GetByteArrayElements(src_i420_array, JNI_FALSE);
jbyte *dst_i420_data = env->GetByteArrayElements(dst_i420_array, JNI_FALSE);
rotateI420(src_i420_data, width, height, dst_i420_data, degree);
env->ReleaseByteArrayElements(src_i420_array, src_i420_data, 0);
env->ReleaseByteArrayElements(dst_i420_array, dst_i420_data, 0);
}
YuvUtil.java
package com.aniljing.androidcamera;
public class YuvUtil {
public native void nv21ToI420(byte[] src_nv21_data, int width, int height, byte[] dst_i420_data);
public native void i420Rotate(byte[] src_i420_data, int width, int height, byte[] dst_i420_data, int degree);
static {
System.loadLibrary("androidcamera");
}
}
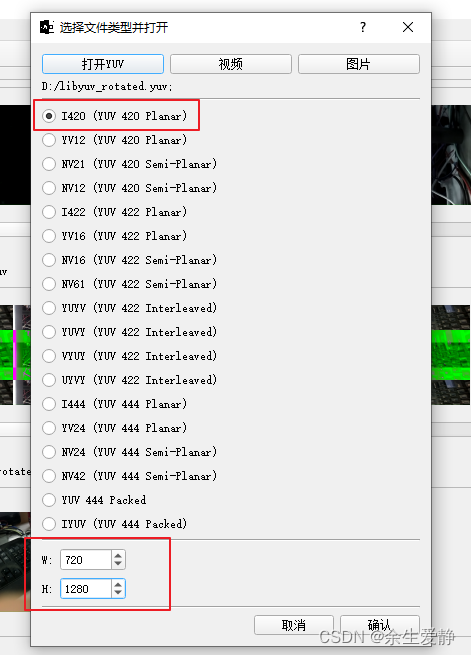

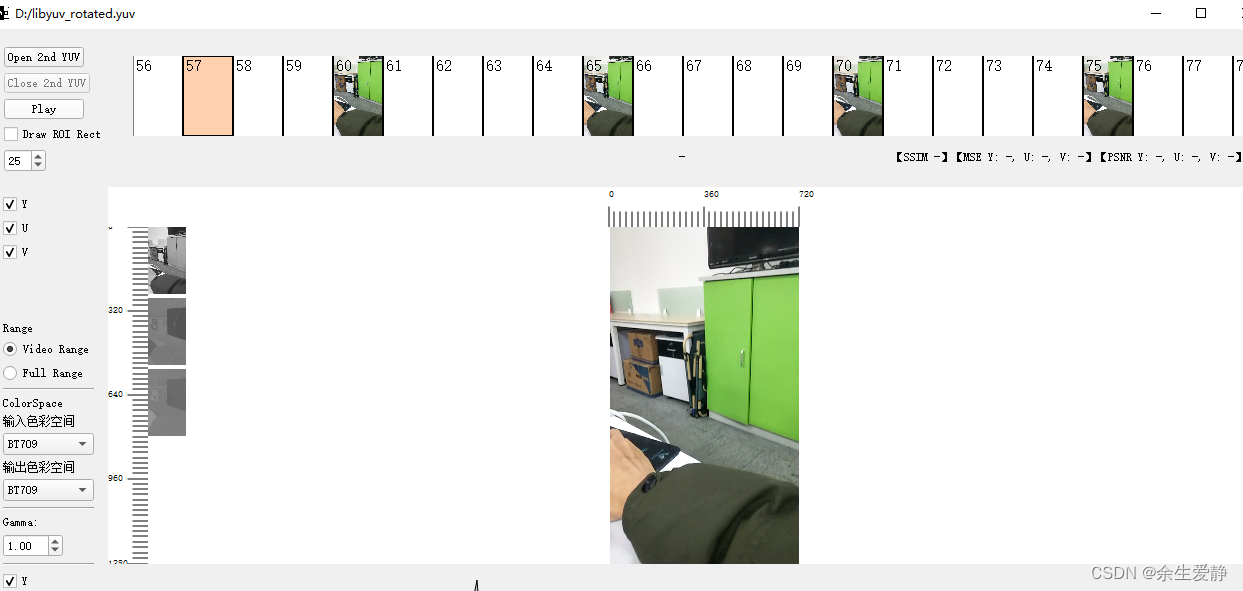
- 格式选择 I420
- 分辨率设置为720*1280
二、Camera2
Camera2(android.hardware.camera2)是从 Android 5.0 L 版本开始引入的,并且废弃了旧的相机框架Camera1(android.hardware.Camera)。
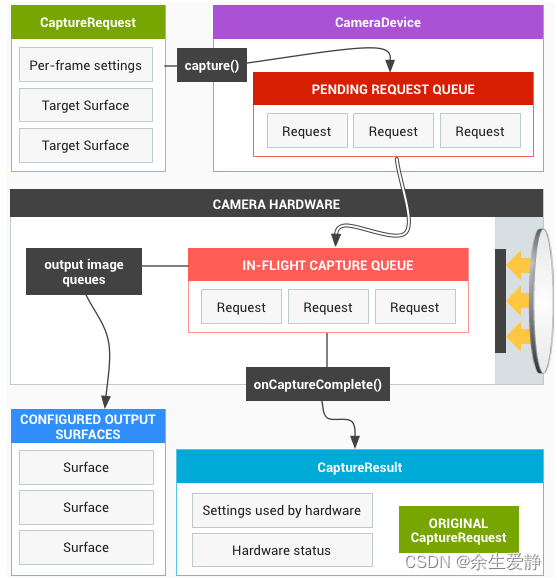
相比于Camera1,Camera2架构上也发生了变化,API上的使用难度也增加了。Camera2将相机设备模拟成一个管道,它按顺序处理每一帧的请求并返回请求结果给客户端。
2.1、核心类
CameraManager
相机系统服务,用于管理和连接相机设备
CameraDevice
相机设备类,和Camera1中的Camera同级
CameraCharacteristics
主要用于获取相机信息,内部携带大量的相机信息,包含摄像头的正反(LENS_FACING)、AE模式、AF模式等,和Camera1中的Camera.Parameters类似
CaptureRequest
相机捕获图像的设置请求,包含传感器,镜头,闪光灯等
CaptureRequest.Builder
CaptureRequest的构造器,使用Builder模式,设置更加方便
CameraCaptureSession
请求抓取相机图像帧的会话,会话的建立主要会建立起一个通道。一个CameraDevice一次只能开启一个CameraCaptureSession。源端是相机,另一端是 Target,Target可以是Preview,也可以是ImageReader。
ImageReader
用于从相机打开的通道中读取需要的格式的原始图像数据,可以设置多个ImageReader。
2.2、使用流程
2.2.1、获取CameraManager
CameraManager cameraManager = (CameraManager) mContext.getSystemService(Context.CAMERA_SERVICE);
2.2.2、获取相机信息,并打开相机
try {
String[] cameraIds = cameraManager.getCameraIdList();
for (int i = 0; i < cameraIds.length; i++) {
//描述相机设备的属性类
CameraCharacteristics characteristics = cameraManager.getCameraCharacteristics(cameraIds[i]);
Range<Integer>[] allFpsRanges = characteristics.get(CameraCharacteristics.CONTROL_AE_AVAILABLE_TARGET_FPS_RANGES);
fpsRanges = allFpsRanges[allFpsRanges.length - 1];
//获取是前置还是后置摄像头
Integer facing = characteristics.get(CameraCharacteristics.LENS_FACING);
//使用后置摄像头
if (facing != null && facing == CameraCharacteristics.LENS_FACING_BACK) {
StreamConfigurationMap map = characteristics.get(CameraCharacteristics.SCALER_STREAM_CONFIGURATION_MAP);
//寻找一个 最合适的尺寸 ---》 一模一样
mPreviewSize = getBestSupportedSize(new ArrayList<Size>(Arrays.asList(map.getOutputSizes(SurfaceTexture.class))));
if (map != null) {
mCameraId = cameraIds[i];
}
orientation = characteristics.get(CameraCharacteristics.SENSOR_ORIENTATION);
//maxImages 此时需要2路,一路渲染到屏幕,一路用于网络传输
mImageReader = ImageReader.newInstance(mPreviewSize.getWidth(), mPreviewSize.getHeight(),
ImageFormat.YUV_420_888, 2);
mImageReader.setOnImageAvailableListener(mOnImageAvailableListener, mCameraHandler);
cameraManager.openCamera(mCameraId, mCameraDeviceStateCallback, mCameraHandler);
}
}
} catch (CameraAccessException r) {
Log.e(TAG, "openCamera:" + r);
Log.e(TAG, "openCamera getMessage:" + r.getMessage());
Log.e(TAG, "openCamera getLocalizedMessage:" + r.getLocalizedMessage());
}
-
ImageReader
ImageReader是获取图像数据的重要途径,通过它可以获取到不同格式的图像数据,例如JPEG、YUV、RAW等。通过ImageReader.newInstance(int width, int height, int format, int maxImages)创建ImageReader对象,有4个参数:- width:图像数据的宽度
- height:图像数据的高度
- format:图像数据的格式,例如ImageFormat.JPEG,ImageFormat.YUV_420_888等
- maxImages:最大Image个数,Image对象池的大小,指定了能从ImageReader获取Image对象的最大值,过多获取缓冲区可能导致OOM,所以最好按照最少的需要去设置这个值
ImageReader其他相关的方法和回调:
- ImageReader.OnImageAvailableListener:有新图像数据的回调
- acquireLatestImage():从ImageReader的队列里面,获取最新的Image,删除旧的,如果没有可用的Image,返回null
- acquireNextImage():获取下一个最新的可用Image,没有则返回null
- close():释放与此ImageReader关联的所有资源
- getSurface():获取为当前ImageReader生成Image的Surface
-
打开相机设备
cameraManager.openCamera(@NonNull String cameraId,@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler)的三个参数:- cameraId:摄像头的唯一标识
- callback:设备连接状态变化的回调
- handler:回调执行的Handler对象,传入null则使用当前的主线程Handler
2.2.3、创建CaptureRequest
private final CameraDevice.StateCallback mCameraDeviceStateCallback = new CameraDevice.StateCallback() {
@Override
public void onOpened(CameraDevice camera) {
try {
mCameraDevice = camera;
SurfaceTexture surfaceTexture = mTextureView.getSurfaceTexture();
surfaceTexture.setDefaultBufferSize(1280, 720);
//Surface负责渲染
Surface previewSurface = new Surface(surfaceTexture);
//创建请求
mPreviewBuilder = mCameraDevice.createCaptureRequest(CameraDevice.TEMPLATE_PREVIEW);
mPreviewBuilder.set(CaptureRequest.CONTROL_AE_TARGET_FPS_RANGE, fpsRanges);
mPreviewBuilder.set(CaptureRequest.CONTROL_AF_MODE, CaptureRequest.CONTROL_AF_MODE_CONTINUOUS_PICTURE);
mPreviewBuilder.addTarget(previewSurface);
mPreviewBuilder.addTarget(mImageReader.getSurface());
//创建会话
mCameraDevice.createCaptureSession(Arrays.asList(previewSurface, mImageReader.getSurface()), mCaptureSessionStateCallBack, mCameraHandler);
} catch (CameraAccessException e) {
e.printStackTrace();
Log.e(TAG, "onOpened:" + e.getMessage());
Log.e(TAG, "onOpened:" + e.getLocalizedMessage());
Log.e(TAG, "onOpened:" + e);
}
}
@Override
public void onDisconnected(CameraDevice camera) {
Log.e(TAG, "onDisconnected");
camera.close();
mCameraDevice = null;
}
@Override
public void onError(CameraDevice camera, int error) {
Log.e(TAG, "onError:" + error);
camera.close();
mCameraDevice = null;
}
};
在CameraDevice.StateCallback的onOpened回调中执行:这段的代码核心方法是mCameraDevice.createCaptureSession()创建Capture会话,它接受了三个参数:
- outputs:用于接受图像数据的surface集合,这里传入的是一个preview的surface
- callback:用于监听 Session 状态的CameraCaptureSession.StateCallback对象
- handler:用于执行CameraCaptureSession.StateCallback的Handler对象,传入null则使用当前的主线程Handler
通过CameraDevice.createCaptureRequest()创建CaptureRequest.Builder对象,传入一个templateType参数,templateType用于指定使用何种模板创建CaptureRequest.Builder对象,templateType的取值:
- TEMPLATE_PREVIEW:预览模式
- TEMPLATE_STILL_CAPTURE:拍照模式
- TEMPLATE_RECORD:视频录制模式
- TEMPLATE_VIDEO_SNAPSHOT:视频截图模式
- TEMPLATE_MANUAL:手动配置参数模式
2.2.4、预览
private final CameraCaptureSession.StateCallback mCaptureSessionStateCallBack = new CameraCaptureSession.StateCallback() {
@Override
public void onConfigured(CameraCaptureSession session) {
try {
mCaptureSession = session;
CaptureRequest request = mPreviewBuilder.build();
// Finally, we start displaying the camera preview.
session.setRepeatingRequest(request, null, mCameraHandler);
} catch (CameraAccessException e) {
e.printStackTrace();
}
}
@Override
public void onConfigureFailed(CameraCaptureSession session) {
Log.e(TAG, "onConfigureFailed:");
}
};
在CameraCaptureSession.StateCallback回调中,Camera2通过连续重复的Capture实现预览功能,每次Capture会把预览画面显示到对应的Surface上。连续重复的Capture操作通过mCaptureSession.setRepeatingRequest(mPreviewRequest,mCaptureCallback, mBackgroundHandler)实现,该方法有三个参数:
- request:CaptureRequest对象
- listener:监听Capture 状态的回调
- handler:用于执行CameraCaptureSession.CaptureCallback的Handler对象,传入null则使用当前的主线程Handler
停止预览使用mCaptureSession.stopRepeating()方法。
2.3、完整实现代码
package com.aniljing.androidcamera;
import android.annotation.SuppressLint;
import android.app.Activity;
import android.content.Context;
import android.graphics.ImageFormat;
import android.graphics.Point;
import android.graphics.Rect;
import android.graphics.SurfaceTexture;
import android.hardware.camera2.CameraAccessException;
import android.hardware.camera2.CameraCaptureSession;
import android.hardware.camera2.CameraCharacteristics;
import android.hardware.camera2.CameraDevice;
import android.hardware.camera2.CameraManager;
import android.hardware.camera2.CaptureRequest;
import android.hardware.camera2.params.StreamConfigurationMap;
import android.media.Image;
import android.media.ImageReader;
import android.os.Handler;
import android.os.HandlerThread;
import android.util.Log;
import android.util.Range;
import android.util.Size;
import android.view.Surface;
import android.view.TextureView;
import java.util.ArrayList;
import java.util.Arrays;
import java.util.List;
/**
* @ClassName Camera2ProviderPreviewWithYUV
* Camera2 两路预览:
* 1、使用TextureView预览,直接输出。
* 2、使用ImageReader获取数据,输出格式为ImageFormat.YUV_420_888,java端转化为NV21
*/
public class Camera2WithYUV {
private static final String TAG = Camera2WithYUV.class.getSimpleName();
private Activity mContext;
private String mCameraId;
private HandlerThread handlerThread;
private Handler mCameraHandler;
private CameraDevice mCameraDevice;
private TextureView mTextureView;
private CaptureRequest.Builder mPreviewBuilder;
private CameraCaptureSession mCaptureSession;
private ImageReader mImageReader;
private Size mPreviewSize;
private final Point previewViewSize;
private Range<Integer> fpsRanges;
private byte[] i420;
private YUVDataCallBack mYUVDataCallBack;
private int orientation;
private YuvUtil mYuvUtil;
public Camera2WithYUV(Activity mContext) {
this.mContext = mContext;
handlerThread = new HandlerThread("camera");
handlerThread.start();
mCameraHandler = new Handler(handlerThread.getLooper());
previewViewSize = new Point();
previewViewSize.x = 640;
previewViewSize.y = 480;
mYuvUtil=new YuvUtil();
}
public void initTexture(TextureView textureView) {
Log.e(TAG, "initTexture:" + textureView);
mTextureView = textureView;
mTextureView.setSurfaceTextureListener(new TextureView.SurfaceTextureListener() {
@Override
public void onSurfaceTextureAvailable(SurfaceTexture surface, int width, int height) {
openCamera();
}
@Override
public void onSurfaceTextureSizeChanged(SurfaceTexture surface, int width, int height) {
}
@Override
public boolean onSurfaceTextureDestroyed(SurfaceTexture surface) {
return true;
}
@Override
public void onSurfaceTextureUpdated(SurfaceTexture surface) {
}
});
}
@SuppressLint("MissingPermission")
private void openCamera() {
CameraManager cameraManager = (CameraManager) mContext.getSystemService(Context.CAMERA_SERVICE);
try {
String[] cameraIds = cameraManager.getCameraIdList();
for (int i = 0; i < cameraIds.length; i++) {
//描述相机设备的属性类
CameraCharacteristics characteristics = cameraManager.getCameraCharacteristics(cameraIds[i]);
Range<Integer>[] allFpsRanges = characteristics.get(CameraCharacteristics.CONTROL_AE_AVAILABLE_TARGET_FPS_RANGES);
fpsRanges = allFpsRanges[allFpsRanges.length - 1];
//获取是前置还是后置摄像头
Integer facing = characteristics.get(CameraCharacteristics.LENS_FACING);
//使用后置摄像头
if (facing != null && facing == CameraCharacteristics.LENS_FACING_BACK) {
StreamConfigurationMap map = characteristics.get(CameraCharacteristics.SCALER_STREAM_CONFIGURATION_MAP);
//寻找一个 最合适的尺寸 ---》 一模一样
mPreviewSize = getBestSupportedSize(new ArrayList<Size>(Arrays.asList(map.getOutputSizes(SurfaceTexture.class))));
if (map != null) {
mCameraId = cameraIds[i];
}
orientation = characteristics.get(CameraCharacteristics.SENSOR_ORIENTATION);
//maxImages 此时需要2路,一路渲染到屏幕,一路用于网络传输
mImageReader = ImageReader.newInstance(mPreviewSize.getWidth(), mPreviewSize.getHeight(),
ImageFormat.YUV_420_888, 2);
mImageReader.setOnImageAvailableListener(mOnImageAvailableListener, mCameraHandler);
cameraManager.openCamera(mCameraId, mCameraDeviceStateCallback, mCameraHandler);
}
}
} catch (CameraAccessException r) {
Log.e(TAG, "openCamera:" + r);
Log.e(TAG, "openCamera getMessage:" + r.getMessage());
Log.e(TAG, "openCamera getLocalizedMessage:" + r.getLocalizedMessage());
}
}
private final CameraDevice.StateCallback mCameraDeviceStateCallback = new CameraDevice.StateCallback() {
@Override
public void onOpened(CameraDevice camera) {
try {
mCameraDevice = camera;
SurfaceTexture surfaceTexture = mTextureView.getSurfaceTexture();
surfaceTexture.setDefaultBufferSize(1280, 720);
//Surface负责渲染
Surface previewSurface = new Surface(surfaceTexture);
//创建请求
mPreviewBuilder = mCameraDevice.createCaptureRequest(CameraDevice.TEMPLATE_PREVIEW);
mPreviewBuilder.set(CaptureRequest.CONTROL_AE_TARGET_FPS_RANGE, fpsRanges);
mPreviewBuilder.set(CaptureRequest.CONTROL_AF_MODE, CaptureRequest.CONTROL_AF_MODE_CONTINUOUS_PICTURE);
mPreviewBuilder.addTarget(previewSurface);
mPreviewBuilder.addTarget(mImageReader.getSurface());
//创建会话
mCameraDevice.createCaptureSession(Arrays.asList(previewSurface, mImageReader.getSurface()), mCaptureSessionStateCallBack, mCameraHandler);
} catch (CameraAccessException e) {
e.printStackTrace();
Log.e(TAG, "onOpened:" + e.getMessage());
Log.e(TAG, "onOpened:" + e.getLocalizedMessage());
Log.e(TAG, "onOpened:" + e);
}
}
@Override
public void onDisconnected(CameraDevice camera) {
Log.e(TAG, "onDisconnected");
camera.close();
mCameraDevice = null;
}
@Override
public void onError(CameraDevice camera, int error) {
Log.e(TAG, "onError:" + error);
camera.close();
mCameraDevice = null;
}
};
private final ImageReader.OnImageAvailableListener mOnImageAvailableListener = new ImageReader.OnImageAvailableListener() {
@SuppressLint("LongLogTag")
@Override
public void onImageAvailable(ImageReader reader) {
Image image = reader.acquireNextImage();
// Y:U:V == 4:2:2
if (mYUVDataCallBack != null && image.getFormat() == ImageFormat.YUV_420_888) {
Rect crop = image.getCropRect();
int format = image.getFormat();
int width = crop.width();
int height = crop.height();
if (i420 == null) {
i420 = new byte[width * height * ImageFormat.getBitsPerPixel(format) / 8];
}
i420 = getI420(image);
if (mYUVDataCallBack != null) {
mYUVDataCallBack.yuvData(i420, width, height, orientation);
}
}
image.close();
}
};
private final CameraCaptureSession.StateCallback mCaptureSessionStateCallBack = new CameraCaptureSession.StateCallback() {
@Override
public void onConfigured(CameraCaptureSession session) {
try {
mCaptureSession = session;
CaptureRequest request = mPreviewBuilder.build();
// Finally, we start displaying the camera preview.
session.setRepeatingRequest(request, null, mCameraHandler);
} catch (CameraAccessException e) {
e.printStackTrace();
}
}
@Override
public void onConfigureFailed(CameraCaptureSession session) {
Log.e(TAG, "onConfigureFailed:");
}
};
public void releaseCamera() {
Log.e(TAG, "releaseCamera");
if (mCaptureSession != null) {
mCaptureSession.close();
mCaptureSession = null;
}
if (mCameraDevice != null) {
mCameraDevice.close();
mCameraDevice = null;
}
if (mPreviewBuilder != null) {
mPreviewBuilder = null;
}
if (mImageReader != null) {
mImageReader.setOnImageAvailableListener(null, null);
mImageReader.close();
mImageReader = null;
}
if (handlerThread != null && !handlerThread.isInterrupted()) {
handlerThread.quit();
handlerThread.interrupt();
handlerThread = null;
}
if (mCameraHandler != null) {
mCameraHandler = null;
}
}
public interface YUVDataCallBack {
void yuvData(byte[] data, int width, int height, int orientation);
}
public void setYUVDataCallBack(YUVDataCallBack YUVDataCallBack) {
mYUVDataCallBack = YUVDataCallBack;
}
private Size getBestSupportedSize(List<Size> sizes) {
Point maxPreviewSize = new Point(640, 480);
Point minPreviewSize = new Point(480, 320);
Size defaultSize = sizes.get(0);
Size[] tempSizes = sizes.toArray(new Size[0]);
Arrays.sort(tempSizes, (o1, o2) -> {
if (o1.getWidth() > o2.getWidth()) {
return -1;
} else if (o1.getWidth() == o2.getWidth()) {
return o1.getHeight() > o2.getHeight() ? -1 : 1;
} else {
return 1;
}
});
sizes = new ArrayList<>(Arrays.asList(tempSizes));
for (int i = sizes.size() - 1; i >= 0; i--) {
if (maxPreviewSize != null) {
if (sizes.get(i).getWidth() > maxPreviewSize.x || sizes.get(i).getHeight() > maxPreviewSize.y) {
sizes.remove(i);
continue;
}
}
if (minPreviewSize != null) {
if (sizes.get(i).getWidth() < minPreviewSize.x || sizes.get(i).getHeight() < minPreviewSize.y) {
sizes.remove(i);
}
}
}
if (sizes.size() == 0) {
return defaultSize;
}
Size bestSize = sizes.get(0);
float previewViewRatio;
if (previewViewSize != null) {
previewViewRatio = (float) previewViewSize.x / (float) previewViewSize.y;
} else {
previewViewRatio = (float) bestSize.getWidth() / (float) bestSize.getHeight();
}
if (previewViewRatio > 1) {
previewViewRatio = 1 / previewViewRatio;
}
for (Size s : sizes) {
if (Math.abs((s.getHeight() / (float) s.getWidth()) - previewViewRatio) < Math.abs(bestSize.getHeight() / (float) bestSize.getWidth() - previewViewRatio)) {
bestSize = s;
}
}
return bestSize;
}
private byte[] getI420(Image image) {
try {
int w = image.getWidth(), h = image.getHeight();
// size是宽乘高的1.5倍 可以通过ImageFormat.getBitsPerPixel(ImageFormat.YUV_420_888)得到
int i420Size = w * h * 3 / 2;
Image.Plane[] planes = image.getPlanes();
//remaining0 = rowStride*(h-1)+w => 27632= 192*143+176 Y分量byte数组的size
int remaining0 = planes[0].getBuffer().remaining();
int remaining1 = planes[1].getBuffer().remaining();
//remaining2 = rowStride*(h/2-1)+w-1 => 13807= 192*71+176-1 V分量byte数组的size
int remaining2 = planes[2].getBuffer().remaining();
//获取pixelStride,可能跟width相等,可能不相等
int pixelStride = planes[2].getPixelStride();
int rowOffest = planes[2].getRowStride();
byte[] nv21 = new byte[i420Size];
//分别准备三个数组接收YUV分量。
byte[] yRawSrcBytes = new byte[remaining0];
byte[] uRawSrcBytes = new byte[remaining1];
byte[] vRawSrcBytes = new byte[remaining2];
planes[0].getBuffer().get(yRawSrcBytes);
planes[1].getBuffer().get(uRawSrcBytes);
planes[2].getBuffer().get(vRawSrcBytes);
if (pixelStride == image.getWidth()) {
//两者相等,说明每个YUV块紧密相连,可以直接拷贝
System.arraycopy(yRawSrcBytes, 0, nv21, 0, rowOffest * h);
System.arraycopy(vRawSrcBytes, 0, nv21, rowOffest * h, rowOffest * h / 2 - 1);
} else {
//根据每个分量的size先生成byte数组
byte[] ySrcBytes = new byte[w * h];
byte[] uSrcBytes = new byte[w * h / 2 - 1];
byte[] vSrcBytes = new byte[w * h / 2 - 1];
for (int row = 0; row < h; row++) {
//源数组每隔 rowOffest 个bytes 拷贝 w 个bytes到目标数组
System.arraycopy(yRawSrcBytes, rowOffest * row, ySrcBytes, w * row, w);
//y执行两次,uv执行一次
if (row % 2 == 0) {
//最后一行需要减一
if (row == h - 2) {
System.arraycopy(vRawSrcBytes, rowOffest * row / 2, vSrcBytes, w * row / 2, w - 1);
} else {
System.arraycopy(vRawSrcBytes, rowOffest * row / 2, vSrcBytes, w * row / 2, w);
}
}
}
//yuv拷贝到一个数组里面
System.arraycopy(ySrcBytes, 0, nv21, 0, w * h);
System.arraycopy(vSrcBytes, 0, nv21, w * h, w * h / 2 - 1);
byte[] i420 = new byte[nv21.length];
mYuvUtil.nv21ToI420(nv21, w, h, i420);
return i420;
}
} catch (Exception e) {
e.printStackTrace();
}
return null;
}
}
源码