内容概要
TiCDC 是一款 TiDB 增量数据同步工具,通过拉取上游 TiKV 的数据变更日志,TiCDC 可以将数据解析为有序的行级变更数据输出到下游。
本文是 TiCDC 源码解读的第二篇,将于大家介绍 TiCDC 的重要组成部分,TiKV 中的 CDC 模块。我们会围绕 4 个问题和 2 个目标展开。
- TiKV 中的 CDC 模块是什么?
- TiKV 如何输出数据变更事件流?
- 数据变更事件有哪些?
- 如何确保完整地捕捉分布式事务的数据变更事件?
希望在回答完这4个问题之后,大家能:
- 🔔 了解数据从 TiDB 写入到 TiKV CDC 模块输出的流程。
- 🗝️ 了解如何完整地捕捉分布式事务的数据变更事件。
在下面的内容中,我们在和这两个目标相关的地方会标记上 🔔 和 🗝️,以便提醒读者留意自己感兴趣的地方。
TiKV 中的 CDC 模块是什么?
CDC 模块的形态
从代码上看,CDC 模块是 TiKV 源码的一部分,它是用 rust 写的,在 TiKV 代码库里面;从运行时上看,CDC 模块运行在 TiKV 进程中,是一个线程,专门处理 TiCDC 的请求和数据变更的捕捉。
CDC 模块的作用
CDC 模块的作用有两个:
- 它负责捕捉实时写入和读取历史数据变更。这里提一下历史数据变更指已经写到 rocksdb 里面的变更。
- 它还负责计算 resolved ts。这个 resolved ts 是 CDC 模块里面特有的概念,形式上是一个 uint64 的 timestamp。它是 TiKV 事务变更流中的 perfect watermark,perfect watermark 的详细概念参考《Streaming System》的第三章,我们可以用 resolved ts 来告知下游,也就是 TiCDC,在 tikv 上所有 commit ts 小于 resolved ts 事务都已经完整发送了,下游 TiCDC 可以完整地处理这批事务了。
CDC 模块的代码分布
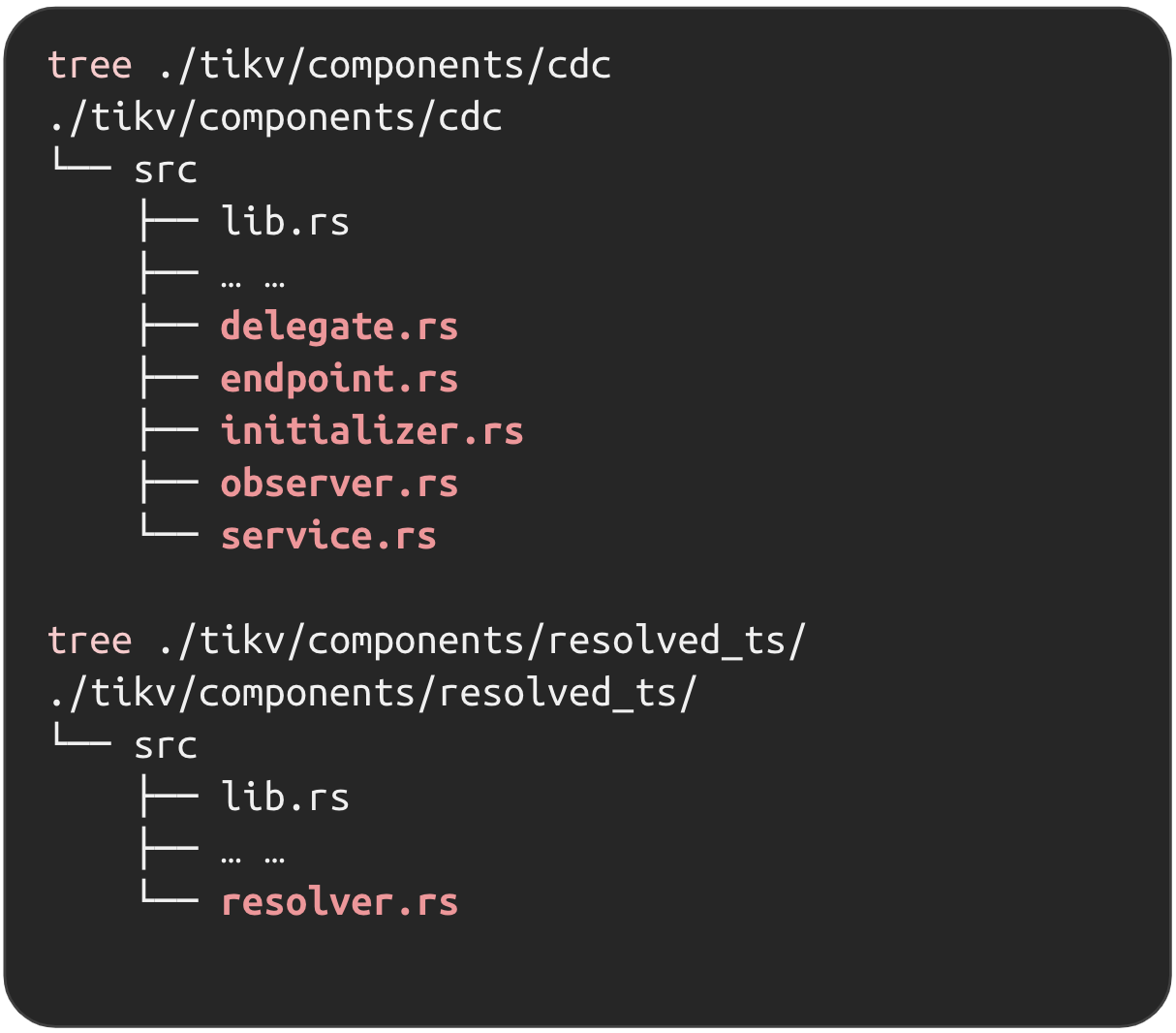
CDC 模块的代码在 TiKV 代码仓库的 compoenetns/cdc 和 components/resolved_ts 模块。我们在下图中的黑框里面用红色标注了几个重点文件。
在 delegate.rs 文件中有个同名的 Delegate 结构体,它可以认为是 Region 在 CDC 模块中的“委派”,负责处理这个 region 的变更数据,包括实时的 raft 写入和历史增量数据。
在 endpoint.rs 文件中有个 Endpoint 结构体,它运行在 CDC 的主线程中,驱动整个 CDC 模块,上面的 delegate 也是运行在整个线程中的。
initializer.rs 文件中的 Initializer 结构体负责增量扫逻辑,同时也负责 delegate 的初始化,这里的增量扫就是读取保存在 rocksdb 中的历史数据变更。
service.rs 文件中的 Service 结构体,它实现了 ChagneData gRPC 服务,运行在 gRPC 的线程中,它负责 TiKV 和 TiCDC 的 RPC 交互,同时它和 Endpoint 中的 Delegate 和 Initializer 也会有交互,主要是接受来自它俩的数据变更事件,然后把这些事件通过 RPC 发送给 TiCDC。
最后一个重要文件是 resolver.rs,它与上面的文件不太一样,在 resolve_ts 这个 component 中,里面的 Resolver 负责计算 resolved ts。
TiKV 如何输出数据变更事件流?
我们从端到端的角度完整地走一遍数据的写入和流出。下图概括了数据的流动,我们以数据保存到磁盘为界,红色箭头代表数据从 TiDB 写入 TiKV 磁盘的方向,蓝色箭头代表数据从 TiKV 磁盘流出到 TiCDC 的方向。
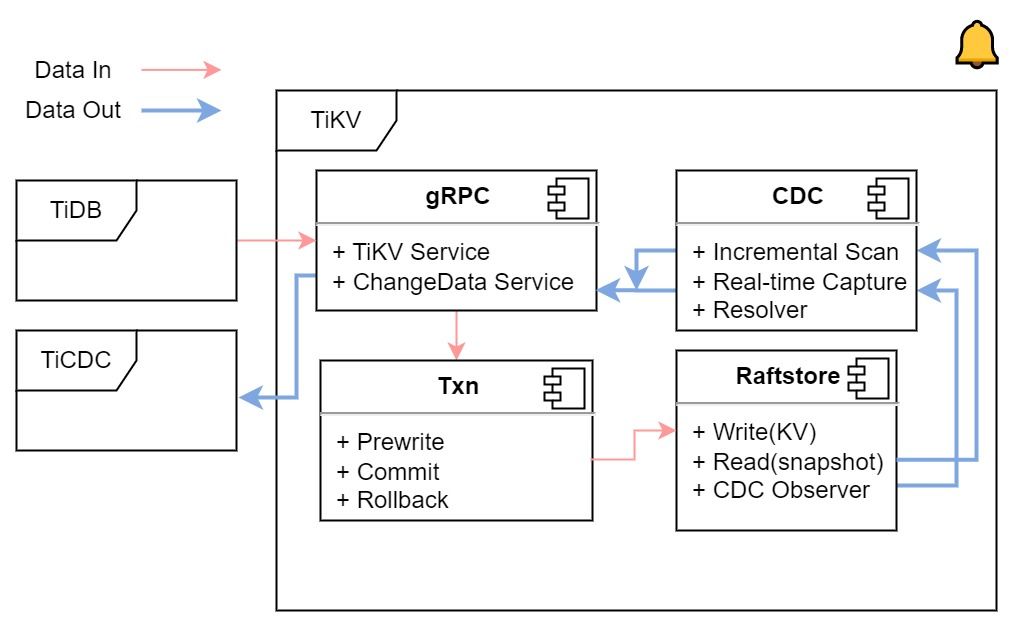
TiDB -> TiKV Service
- txn prewrite: Tikv::kv_prewrite(PrewriteRequest)
- txn commit: Tikv::kv_commit(CommitRequest)
我们看下从 TiDB 指向 TiKV 的红线。我们知道数据来自 TiDB 的事务写入,对于一个正常的事务来说,TiDB 需要分两次调用 TiKV 的 gRPC 接口,分别是 kv_prewrite 和 kv_commit,对应了事务中的 prewrite 和 commit,在 request 请求中包含了要写入或者删除的 key 和它的 value,以及一些事务的元数据,比如 start ts,commit ts 等。
TiKV Service -> Txn
- txn prewrite: Storage::sched_prewrite(PrewriteRequest)
- txn commit: Storage::sched_commit(CommitRequest)
我们再看从 gRPC 指向 Txn 的红线。它代表 RPC 请求从 gRPC 模块流到事务模块的这一步。这里相应的也有两个 API 的调用,分别是 sched_prewrite 和 sched_commit,在这两个 API 中,事务模块会对 request 做一些检查,比如检查 write conflict,计算 commit ts 等(事务的细节可以参考 TiKV 的源码阅读文章,在这里就先跳过了。)
Txn -> Raftstore
- txn prewrite: Engine::async_write_ext(RaftCmdRequest)
- txn commit: Engine::async_write_ext(RaftCmdRequest)
事务模块到 Raftstore 的红线代表:Request 通过检查后,会被事务模块序列化成对 KV 的操作,然后被组装成 RaftCmdRequest。RaftCmdRequest 再经由 Engine::async_commit_ext API 被发送至 Raftstore 模块。
大家可以看到 prewrite 和 commit 都是变成了 RaftCmdRequest,也都是通过 Engine::async_commit_ext 发送到 Raftstore 模块的。这说明了什么呢?它说明了到 Engine 这一层,TiDB 的请求中的事务信息已经被“抹去”了,所有的事务信息都存到了 key 和 value 里面。
Raftstore 模块会将这些 key value 提交到 Raft Log 中,如果 Raft Log Commit 成功,Apply 线程会将这些 key 和 value 写入到 Rocksdb。(这里面的细节可以参考 TiKV 的源码阅读文章,在这里就先跳过了。)
Rafstore -> CDC
- RaftCmd: CoprocessorHost::on_flush_applied_cmd_batch(Vec)
- Txn Record: Engine::async_snapshot()
从这里起,数据开始流出了,从 Raftstore 到 CDC 模块有两条蓝线,对应这里的两个重要的 API,分别为 on_flush_applied_cmd_batch 实时数据的流出,和 async_snapshot 历史增量数据的流出(后面会说细节)。
CDC -> gRPC -> TiCDC
- ChangeDataEvent: Service::event_feed() -> ChangeDataEvent
最后就是从 CDC 模块到 TiCDC 这几条蓝线了。数据进入 CDC 模块后,经过一系列转换,组装成 Protobuf message,最后交给 gRPC 通过 ChangeData service 中的 EventFeed 这个 RPC 发送到下游的 TiCDC。
CDC 模块中的数据流动
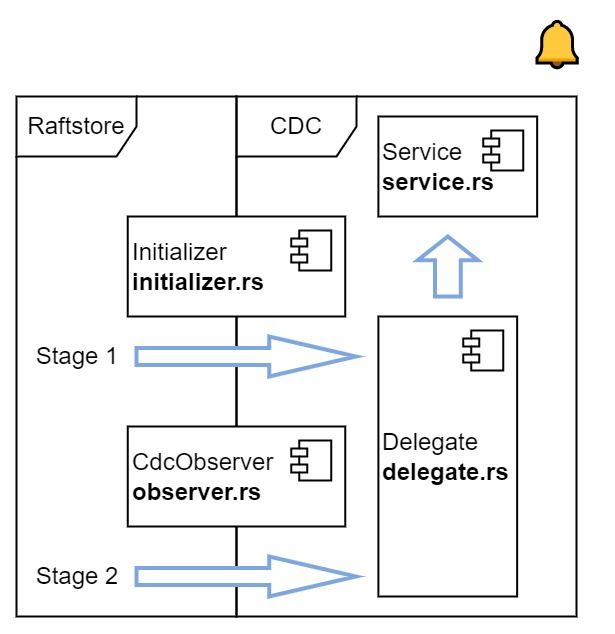
上图示意了数据从 Raftstore 发送到 TiCDC 模块的细节。
数据从 Raftstore 到 CDC 模块,可以分成两个阶段,对应两条链路:
-
阶段 1,增量扫,Initializer -> Delegate。
Initializer 从 Raftstore 拿一个 Snapshot,然后在 Snapshot 上读一些历史数据变更,读的范围有两个维度:
-
时间维度
(checkpoint ts, current ts],checkpoint ts 可以理解成 changefeed 上的 checkpoint,current ts 代表 PD leader 上的当前时间。 -
key 范围
[start key, end key),一般为 region 的 start key 和 end key。
-
-
阶段 2,实时写入监听,CdcObserver -> Delegate
CdcObserver实现对实时写入的监听。它运行在 Raftstore 的 Apply 线程中,只有在 TiCDC 对一个 Region 发起监听后才会启动运行。我们知道所有的数据都是通过 Apply 线程写入的,所以说CdcObserver能轻松地在第一时间把数据捕捉到,然后交给Delegate。
我们再看一下数据从 CDC 模块到 gRPC 的流程,大体也有两部分。第一部分是汇总增量扫和实时写入;第二部分将这些数据是从 KV 数据反序列化成包含事务信息的 Protobuf message。我们再将这些事务结构体里面的信息给提取出来,填到一个 Protobuf message 里面。
Raftstore 和 TiCDC 的交互
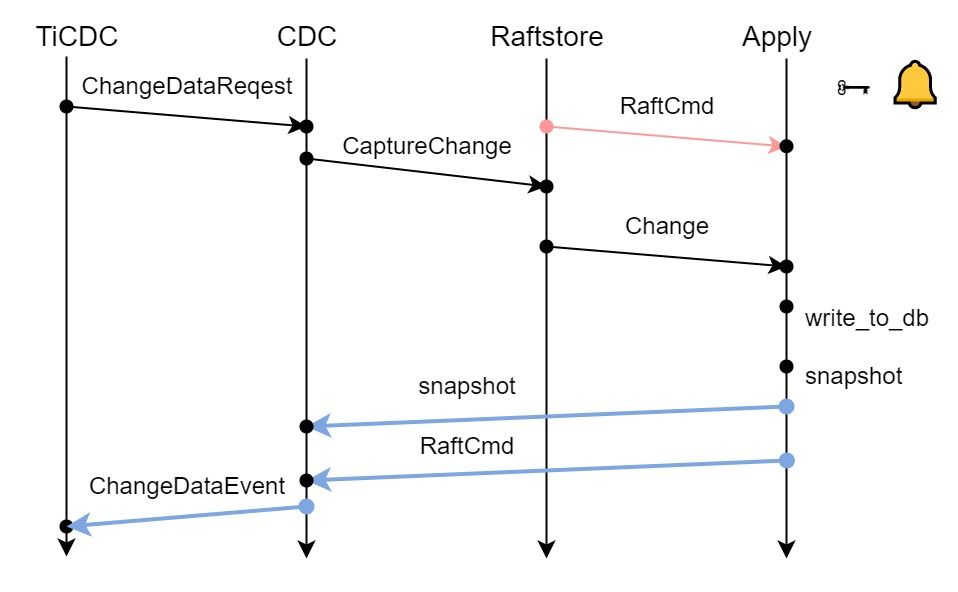
上图是 Raftstore 和 CDC 模块的交互时序图。第一条线是 TiCDC,第二条是 CDC 线程,第三条是 Raftsotre 线程,第四条是 Apply 线程,图中每个点都是发生在线程上的一些事件,包含发消息、收消息和进程内部的处理逻辑。在这里我们重点说 Apply 线程。
Apply 线程在处理 Change 这个消息的时候,它会先要把缓存在内存中的 KV 的写入给刷到 RocksDB,然后获取 RocksDB 的 Snapshot,把 Snapshot 发送给 CDC 线程。这三步是串行的,保证了 Snapshot 可以看到之前所有的写入。有了这个机制保证,我们就可以确保 CDC 模块既不漏数据,也不多数据。
数据变更事件有哪些?

数据变更事件可分为两大类,第一类是 Event;第二类是 ResolvedTs。上图是 CDC Protobuf 的简化版定义,只保留了关键的 field。我们从上到下看下这个 Protobuf 定义。
EventFeed 定义了 TiCDC 和 TiKV 之间的消息交互方式,TiCDC 在一个 RPC 上可以发起对多个 Region 的监听,TiKV 以 ChangeDataEvent 形式将多个 Region 的数据变更事件发送给 TiCDC。
Event 代表着是 Region 级别的数据变更事件,包含了至少一个用户数据变更事件或者或者 Region 元数据的变更。它们是从单条 Raft Log 翻译得到的。我们可以注意到 Event 被 repeat 修饰了,也就是它可能包含了一个 region 多个数据变更,也可能包含多个不同 region 的数据变更。
Entries 包含了多个 Row。因为在 oneof 里面不能出现 repeated ,所以我们用 Entries 包装了下。
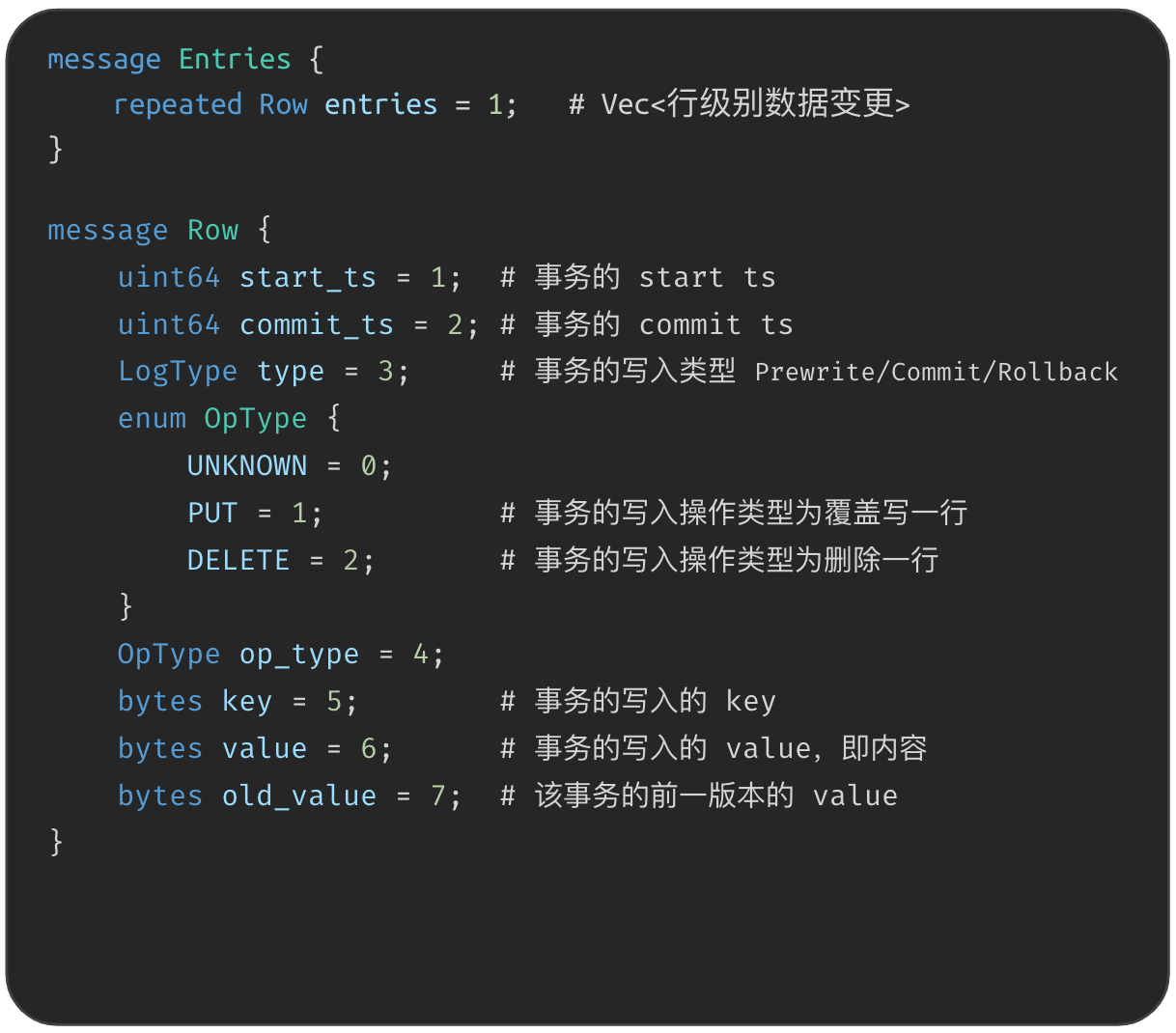
Row 里面的内容非常接近 TiDB 层面的数据了,它是行级别的数据变更,包含:
- 事务的 start ts;
- 事务的 commit ts;
- 事务写入的类型,Prewrite/Commit/Rollback;
- 事务对数据的操作,
op_type,put 覆盖写一行和 delete 删除一行; - 事务写入的 key;
- 事务写入的 value;
- 该事务之前的 value,old value 在很多 CDC 协议上都会有体现,比如说 MySQL 的 maxwell 协议中的 “old” 字段。
如何确保完整地捕捉分布式事务的数据变更事件?
什么是“完整”?
我们需要定义完整是什么。在这里,“完整”的主体是 TiDB 中的事务,我们知道 TiDB 的事务会有两个写入事件,第一个是 prewrite,第二是 commit 或者 rollback。同时,TiDB 事务可能会涉及多个 key,这些有可能分布在不同的 region 上。所以,我们说“完整”地捕捉一个事务需要捕捉它涉及的所有的 key 和所有的写入事件。
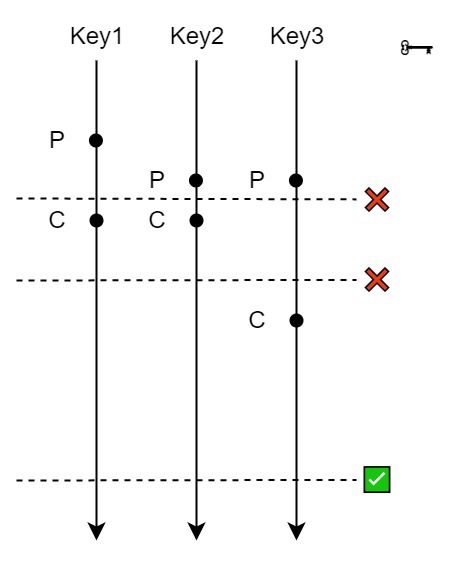
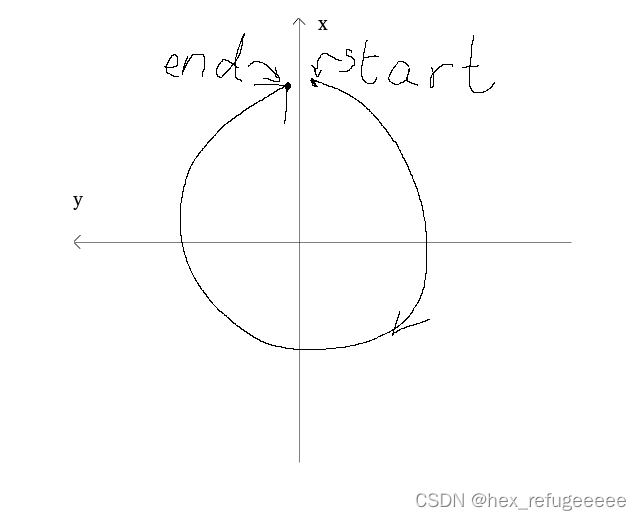
上图描绘了一个涉及了三个 key 的事务,P 代表事务的 prewrite,C 代表事务的 commit,虚线代表一次捕捉。
前面两条虚线是不“完整”的捕捉,第一条虚线漏了所有 key 的 commit 事件,第二条虚线捕捉到了 k1 和 k2 的 prewrite 和 commit,但漏了 k3 的 commit。如果我们强行认为第二条虚线是“完整”的,则会破坏事务的原子性。
最后一条虚线才是“完整”的捕捉,因为它捕捉到了所有 key 的所有写入。
如何确认已经“完整”?
确认“完整”的方法有很多种,最简单的办法就是–等。一般来说,只要我们等的时间足够长,比如等一轮 GC lifetime,我们也能确认完整。但是这个办法会导致 TiCDC 的 RPO 不达标。
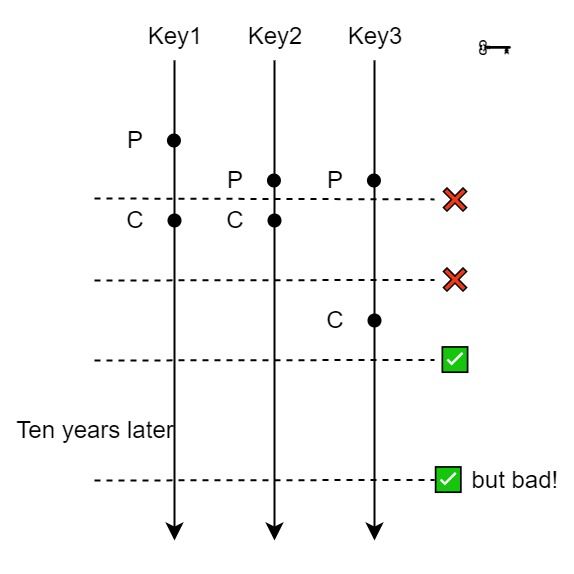
上图最后两条虚线是两次“完整”的捕捉,假如第四条线十年之后才产生的,显然它对我们来说是没有意义的。第四条虽然是“完整”的,但是不是我们想要的。所以我们需要一种机制能够尽快地告知我们已经捕捉完整了,也就是图中第三条虚线,在时间上要尽可能地靠近最后一个变更的捕捉。那这个机制的话就是前面提到的 resolved ts。
ResolvedTs 事件及性质
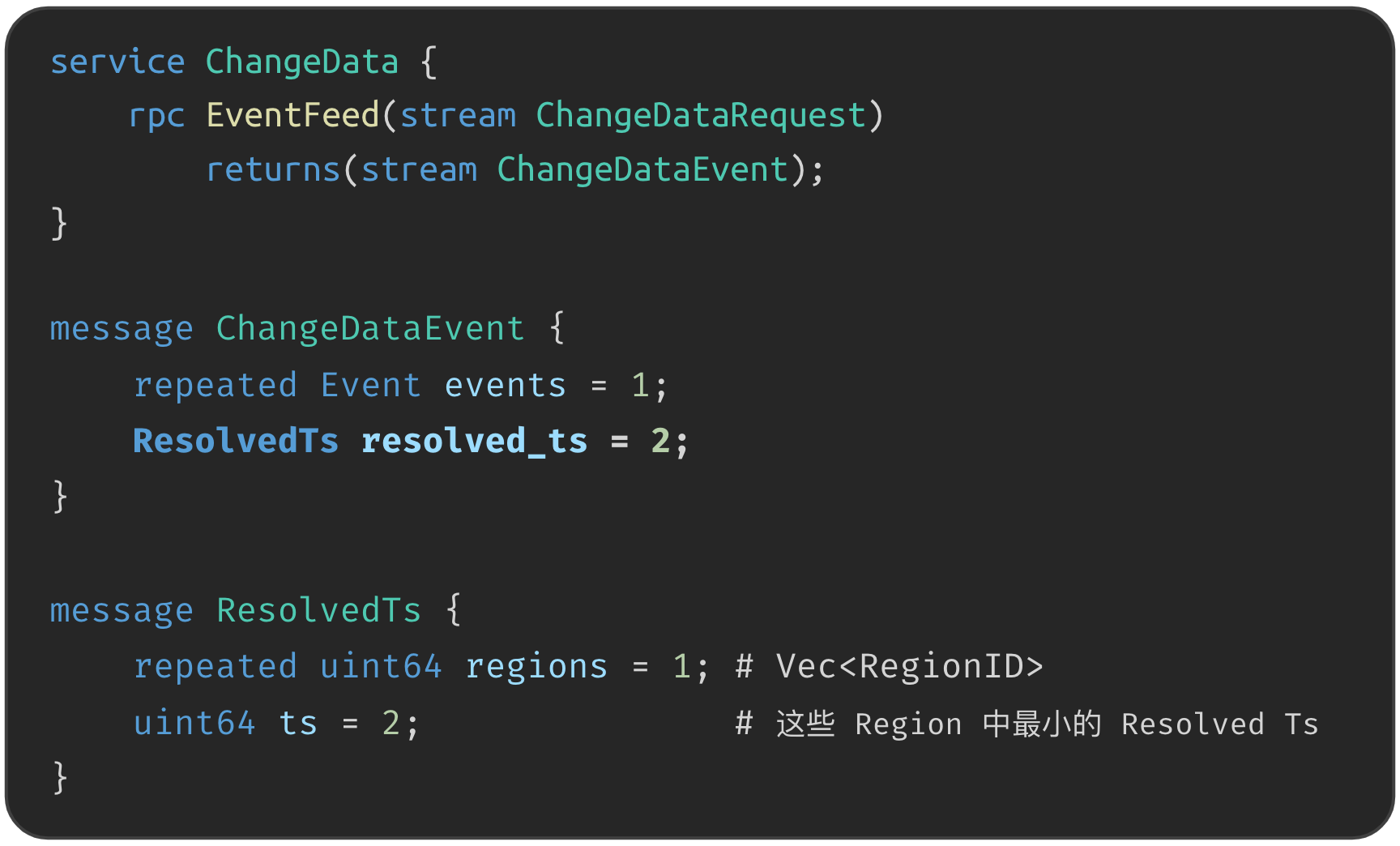
ResolvedTs 在 Protobuf 中的定义比较简单,一个 Region ID 数组和一个 resolved ts。它记录了一批 Region 中最小的 resolved ts,会混在数据变更事件流中发送给 TiCDC。从 resolved ts 事件生成的时候开始,TiDB 集群就不会产生 commit ts 小于 resolved ts 的事务了。从而 TiCDC 收到这个事件之后,便能确认这些 Region 上的数据变更事件的完整性了。
resolved ts 的计算

Resolved ts 的计算逻辑在 resolver.rs 文件中,可以用简单三行伪代码表示:
- 第一行,它要从 PD 那边取一个 TS,称它为
min_ts。 - 第二行,我们拿
min_ts和 Region 中的所有 lock 的 start ts 做比较,取最小值,我们称它为new_resolved_ts。 - 我们拿
new_resolved_ts和之前的resolved_ts做比较,取最大值,这就是当前时刻的 resolved ts。因为它小于所有 lock 的 start ts,所有它一定小于这些 lock 的未来的 commit ts。同时,在没有 lcok 的时候,min_ts会变成 resolved ts,也是就当前时刻 PD 上最新的 ts 将会变成 resolved ts,这确保了它有足够的实时性。
数据变更事件流的例子
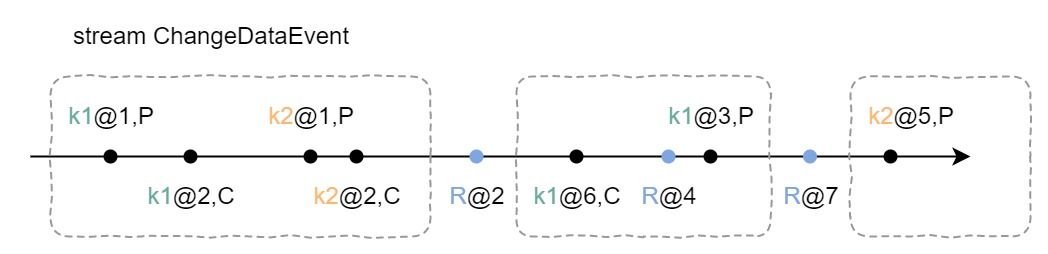
上图是一个数据变更事件流的例子,也就是 gRPC EventFeed 中的 stream ChangeDataEvent。
例子中有三个事务和三个 resolved ts 事件:
- 第一个事务涉及了 k1 和 k2,它的 start ts 是 1, commit ts 是2。
- 第二个事务只包含了 k1 这一个 key,它的 start ts 是 3,commit ts 是 6,注意,这个事务在事件流中出现了乱序,它的 commit 先于 prewrite 出现在这条流中。
- 第三个事务包含了 k2 的一个事务,注意它只有一个 prewrite 事件,commit 事件还没发生,是一个正在进行中的一个事务。
- 第一个 resolved ts 事件中的 resolved ts 是 2,代表 commit ts 小于等于 2 的事务已经完整发送,在这个例子中可以把第一个事务安全的还原出来。
- 第二个 resolved ts 事件中的 resolved ts 是 4,这时 k1 的 commit 事件已经发送了,但是 prewrite 事件没有,4 就阻止了还原第二个事务。
- 第三个 resolved ts 事件出现后,我们就可以还原第二个事务了。
结尾
以上就是本文的全部内容。希望在阅读上面的内容后,读者能知道文章开头的四个问题和了解:
- 🔔数据从 TiDB 写入到 TiKV CDC 模块输出的流程
- 🗝️了解如何完整地捕捉分布式事务的数据变更事件