目录
1.算法概述
2.仿真效果预览
3.核心MATLAB代码预览
4.完整MATLAB程序
1.算法概述
假设我们的行为准则已经学习好了, 现在我们处于状态s1, 我在写作业, 我有两个行为 a1, a2, 分别是看电视和写作业, 根据我的经验, 在这种 s1 状态下, a2 写作业 带来的潜在奖励要比 a1 看电视高, 这里的潜在奖励我们可以用一个有关于 s 和 a 的 Q 表格代替, 在我的记忆Q表格中, Q(s1, a1)=-2 要小于 Q(s1, a2)=1, 所以我们判断要选择 a2 作为下一个行为. 现在我们的状态更新成 s2 , 我们还是有两个同样的选择, 重复上面的过程, 在行为准则Q 表中寻找 Q(s2, a1) Q(s2, a2) 的值, 并比较他们的大小, 选取较大的一个. 接着根据 a2 我们到达 s3 并在此重复上面的决策过程. Q learning 的方法也就是这样决策的. 看完决策, 我看在来研究一下这张行为准则 Q 表是通过什么样的方式更改, 提升的.
机器学习算法可以分为3种:有监督学习(Supervised Learning)、无监督学习(Unsupervised Learning)和强化学习(Reinforcement Learning),如下图所示:
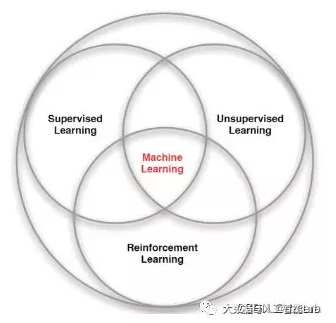
有监督学习、无监督学习、强化学习具有不同的特点:
有监督学习是有一个label(标记)的,这个label告诉算法什么样的输入对应着什么样的输出,常见的算法是分类、回归等;
无监督学习则是没有label(标记),常见的算法是聚类;
强化学习强调如何基于环境而行动,以取得最大化的预期利益。
主要学习内容:
强化学习是什么,奖励思想。
强化学习的三种途径。
深度强化学习的“深”是什么意思
Q-Learning的QTable标签更新公式:
Q-Learning的计算步骤:
1.判断在当前位置可以有几种操作;
2.根据当前位置允许的操作选择一个操作;
3.根据选择的操作进行奖赏;
4.修改当前行为的本次操作权重;
2.仿真效果预览
matlab2022a仿真结果如下:



3.核心MATLAB代码预览
function varargout =PathPlanning(varargin)
% 移动机器人路径规划仿真平台接口:仿真平台提供了机器人工作环境的仿真界面,利用inf=load('inf'),sp=inf.StartPoint,
% EP=inf.EndPoint,WS=inf.env得到机器人工作环境的出发点、目标点位置及障碍物位置信息,工作空间边界及障碍物区域设置为1,自由空间
%设置为0。
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @Simulation_OpeningFcn, ...
'gui_OutputFcn', @Simulation_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before GridSimulation is made visible.
function Simulation_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to GridSimulation (see VARARGIN)
% Choose default command line output for GridSimulation
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes GridSimulation wait for user response (see UIRESUME)
% uiwait(handles.mainfig);
%cd D:\Simulation\EvolvingPath\path
cla
grid on
xlabel('X'); ylabel('Y');
%初始化,获取各对象句柄
handles.StartPoint=findobj('tag','StartPoint'); %获取“设置开始点”按钮句柄
handles.EndPoint=findobj('tag','EndPoint'); %获取“设置目标点”按钮句柄
handles.Obstacle=findobj('tag','Obstacle'); %获取“设置障碍物”按钮句柄
handles.Start=findobj('tag','Start'); %获取“开始运行”按钮句柄
handles.OldEnv=findobj('tag','OldEnv'); %获取“还原环境”按钮句柄
handles.MainAxes=findobj('tag','MainAxes'); %获取主坐标句柄
handles.MainFigure=findobj('tag','MainFigure'); %获取主窗口句柄
%初始化,设置各按钮显示状态
set(handles.StartPoint,'Enable','on') %“设置开始点”按钮可用
set(handles.EndPoint,'Enable','off') %“设置目标点”按钮禁用
set(handles.Obstacle,'Enable','off') %“设置障碍物”按钮禁用
set(handles.Start,'Enable','off') %“开始运行”按钮禁用
set(handles.OldEnv,'Enable','off') %“还原环境”按钮可用
set(handles.MainFigure,'WindowButtonDownFcn',''); %
set(handles.MainFigure,'WindowButtonUpFcn',''); %
set(handles.MainAxes,'ButtonDownFcn',''); %
set(handles.MainAxes,'ButtonDownFcn',''); %
inf=load('inf'); %打开环境信息文件,inf.mat由save命令创建,存储了开始点、目标点、障碍物信息等
XLim=20; %x轴最大取值
YLim=20; %y轴最大取值
BreakTask=0; %初始化终止任务变量
for i=1:XLim %将边界设置成障碍物
for j=1:YLim
if ((i==1)|(i==XLim)|(j==1)|(j==YLim))
ws(i,j)=1;
end
end
end
save('inf','ws','-append');
save('inf','BreakTask','-append');
% --- Outputs from this function are returned to the command line.
function varargout = Simulation_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on button press in StartPoint.
function StartPoint_Callback(hObject, eventdata, handles)
% hObject handle to StartPoint (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
set(handles.StartPoint,'Enable','off')
set(handles.EndPoint,'Enable','on')
set(handles.Obstacle,'Enable','off')
set(handles.Start,'Enable','off')
flag=0;
save('inf','flag','-append');
set(handles.MainFigure,'WindowButtonDownFcn','');
set(handles.MainFigure,'WindowButtonUpFcn','');
set(handles.MainAxes,'ButtonDownFcn','PathPlanning(''MainAxes_ButtonDownFcn'',gcbo,[],guidata(gcbo))');
% --- Executes on button press in EndPoint.
function EndPoint_Callback(hObject, eventdata, handles)
% hObject handle to EndPoint (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
set(handles.StartPoint,'Enable','off')
set(handles.EndPoint,'Enable','off')
set(handles.Obstacle,'Enable','on')
set(handles.Start,'Enable','on')
flag=1;
save('inf','flag','-append');
%set(handles.MainFigure,'WindowButtonDownFcn','');
%set(handles.MainFigure,'WindowButtonUpFcn','');
set(handles.MainAxes,'ButtonDownFcn','PathPlanning(''MainAxes_ButtonDownFcn'',gcbo,[],guidata(gcbo))');
% --- Executes on mouse press over axes background.
function MainAxes_ButtonDownFcn(hObject, eventdata, handles)
% hObject handle to MainAxes (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
inf=load('inf');
flag=inf.flag;
start_end=inf.start_end;
p=get(handles.MainAxes,'CurrentPoint');
hold on;
if(flag==0)
p=round(p);
start_end(1,1)=p(1,1);start_end(1,2)=p(1,2); %记录起点信息,给inf.mat文件赋值
StartPoint(1,1)=p(1,1);StartPoint(1,2)=p(1,2); %为当前点赋值,当前点为起点的位置信息
save('inf','StartPoint','-append');
HRobot=plot(start_end(1,1),start_end(1,2),'pentagram'); %画开始点位置
text(start_end(1,1)-.5,start_end(1,2)-.5,'Start');
RobotDirection=inf.RobotDirection;%机器人方向应该是传递参数
x=start_end(1,1);
y=start_end(1,2);
RobotPosX=x;
RobotPosY=y;
save('inf','RobotPosX','-append');
save('inf','RobotPosY','-append');
else
p=round(p);
start_end(2,1)=p(1,1);start_end(2,2)=p(1,2);
EndPoint(1,1)=p(1,1);EndPoint(1,2)=p(1,2); %为当前点赋值,当前点为结束点的位置信息
EndPoint=round(EndPoint);
save('inf','EndPoint','-append');
plot(start_end(2,1),start_end(2,2),'*','color','r')
text(start_end(2,1)-.5,start_end(2,2)+.5,'Goal');
end
save('inf','start_end','-append');
set(handles.MainAxes,'ButtonDownFcn','');
set(handles.MainAxes,'ButtonDownFcn','');
% --- Executes on button press in Obstacle.
function Obstacle_Callback(hObject, eventdata, handles)
% hObject handle to Obstacle (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
env=zeros(50);
save('inf','env','-append');
set(handles.StartPoint,'Enable','off')
set(handles.EndPoint,'Enable','off')
set(handles.Obstacle,'Enable','on')
set(handles.Start,'Enable','on')
set(handles.OldEnv,'Enable','on') %“开始运行”按钮禁用
set(handles.MainFigure,'WindowButtonDownFcn','PathPlanning(''MainFigure_WindowButtonDownFcn'',gcbo,[],guidata(gcbo))');
%set(handles.MainFigure,'WindowButtonUpFcn','PathPlanning(''MainFigure_WindowButtonUpFcn'',gcbo,[],guidata(gcbo))');
function MainFigure_WindowButtonDownFcn(hObject, eventdata, handles)
% hObject handle to MainFigure (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
inf=load('inf');
ws=inf.env;
Pos=get(handles.MainAxes,'CurrentPoint');
Pos=round(Pos);
XPos=Pos(1,1);YPos=Pos(1,2); %当前点坐标
X=[XPos-.5,XPos-.5,XPos+.5,XPos+.5];
Y=[YPos-.5,YPos+.5,YPos+.5,YPos-.5];
fill(X,Y,[0 0 0]) %画障碍物
text(13-.2,12,'B','color',[1 1 1]);
text(7-.2,8,'A','color',[1 1 1]);
% for i=XPos-1:XPos+1
% for j=YPos-1:YPos+1
% if((i>0)&(i<=XLim)) %防止出现环境矩阵元素下标为零
% if((j>0)&(j<=YLim))
ws(XPos,YPos)=1;
% end
% end
% end
%end
env=ws;
save('inf','env','-append');
% --- Executes on button press in SensorChecked.
function SensorChecked_Callback(hObject, eventdata, handles)
% hObject handle to SensorChecked (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hint: get(hObject,'Value') returns toggle state of SensorChecked
function RobotVelocity_Callback(hObject, eventdata, handles) %设置机器人运行速度
% hObject handle to RobotVelocity (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of RobotVelocity as text
% str2double(get(hObject,'String')) returns contents of RobotVelocity as a double
function RobotRadius_Callback(hObject, eventdata, handles) %设置机器人半径
% hObject handle to RobotRadius (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of RobotRadius as text
% str2double(get(hObject,'String')) returns contents of RobotRadius as a double
% --- Executes during object creation, after setting all properties.
function SensorMaxValue_Callback(hObject, eventdata, handles) %设置传感器测量范围
% hObject handle to SensorMaxValue (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of SensorMaxValue as text
% str2double(get(hObject,'String')) returns contents of SensorMaxValue as a double
function Handbook_Callback(hObject, eventdata, handles) %系统简介
% hObject handle to Handbook (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
uiopen('系统简介.txt',1)
function ClearScreen_Callback(hObject, eventdata, handles) %重新开始
% hObject handle to ClearScreen (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
set(handles.StartPoint,'Enable','on') %“设置开始点”按钮可用
set(handles.EndPoint,'Enable','off') %“设置目标点”按钮禁用
set(handles.Obstacle,'Enable','off') %“设置障碍物”按钮禁用
set(handles.Start,'Enable','off') %“开始运行”按钮禁用
cla
clear all
% --- Executes on button press in OldEnv.
function OldEnv_Callback(hObject, eventdata, handles)
% hObject handle to OldEnv (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
XLim=20; %x轴最大取值
YLim=20; %y轴最大取值
inf=load('inf');
ws=inf.env; %得到障碍物信息
SP=inf.StartPoint; %出发点位置
EP=inf.EndPoint; %目标点位置
set(handles.StartPoint,'Enable','off')
set(handles.EndPoint,'Enable','off')
set(handles.Obstacle,'Enable','off')
set(handles.Start,'Enable','on')
HandleStart=line([SP(1,1) SP(1,1)],[SP(1,2) SP(1,2)]); %设置开始点
text(SP(1,1)-.5,SP(1,2)-.5,'Start');
HandleTarget=line([EP(1,1) EP(1,1)],[EP(1,2) EP(1,2)]); %设置目标点
text(EP(1,1)-.5,EP(1,2)+.5,'Goal');
set(HandleStart,'marker','pentagram')
set(HandleTarget,'marker','*','color','r')
for i=1:XLim %将边界设置成障碍物
for j=1:YLim
if ((i==1)|(i==XLim)|(j==1)|(j==YLim))
ws(i,j)=1;
end
end
end
for i=2:XLim-1 %还原障碍物信息
for j=2:YLim-1
if((ws(i,j)==1))
X=[i-.5,i-.5,i+.5,i+.5];
Y=[j-.5,j+.5,j+.5,j-.5];
fill(X,Y,[0 0 0]); %设置障碍物
end
end
end
X=[1-.5,1-.5,1+.5,1+.5];
Y=[6-.5,6+.5,6+.5,6-.5];
fill(X,Y,[0 0 0]); %设置障碍物
X=[1-.5,1-.5,1+.5,1+.5];
Y=[14-.5,14+.5,14+.5,14-.5];
fill(X,Y,[0 0 0]); %设置障碍物
X=[10-.5,10-.5,10+.5,10+.5];
Y=[1-.5,1+.5,1+.5,1-.5];
fill(X,Y,[0 0 0]); %设置障碍物
text(13-.2,12,'B','color',[1 1 1]);
text(7-.2,8,'A','color',[1 1 1]);
X=[0,0,.5,.5];
Y=[0,YLim,YLim,0];
fill(X,Y,[0 0 0]); %设置边界为障碍物
X=[XLim-.5,XLim-.5,XLim,XLim];
Y=[0,YLim,YLim,0];
fill(X,Y,[0 0 0]); %设置边界为障碍物
X=[0,0,XLim,XLim];
Y=[YLim-.5,YLim,YLim,YLim-.5];
fill(X,Y,[0 0 0]); %设置边界为障碍物
X=[0,0,XLim,XLim];
Y=[0,.5,.5,0];
fill(X,Y,[0 0 0]); %设置边界为障碍物
%axis([0 20 0 20])
%机器人当前位置设置为开始位置
RobotPosX=SP(1,1);
RobotPosY=SP(1,2);
save('inf','RobotPosX','-append');
save('inf','RobotPosY','-append');
function RobotSingleLength_Callback(hObject, eventdata, handles) %设置单步运行距离
% hObject handle to RobotSingleLength (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of RobotSingleLength as text
% str2double(get(hObject,'String')) returns contents of RobotSingleLength as a double
function BreakTask_Callback(hObject, eventdata, handles)
% hObject handle to BreakTask (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
BreakTask=1;
inf=load('inf');
save('inf','BreakTask','-append');
function SaveAs_Callback(hObject, eventdata, handles)
% hObject handle to SaveAs (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%saveas(hObject,'g.bmp');
%print(gcf, '-depsc','-tiff','-r600','test.eps')
%saveas(gcf, 'test.eps', 'psc2')
%pause
axes(handles.MainAxes); %取得axes1的句柄
if isempty(handles.MainAxes)
return;
end
newFig = figure;%由于直接保存axes1上的图像有困难,所以保存在新建的figure中的谱图
set(newFig,'Visible','off','color',[1,1,1])%设置新建的figure为不可见
newAxes = copyobj(handles.MainAxes,newFig); %将axes1中的图复制到新建的figure中
set(newAxes,'Units','default','Position','default'); % 设置图显示的位置
[filename,pathname] = uiputfile({ '*.tif','figure type(*.tif)'}, '结果另存为');
if isequal(filename,0)||isequal(pathname,0)%如果用户选择“取消”,则退出
return;
else
fpath=fullfile(pathname,filename);
end
f = getframe(newFig);
f = frame2im(f);
imwrite(f, fpath);
%saveas(newFig,'filename.eps')
%close(newFig)
%移动机器人路径规划仿真平台程序 END END END END END END END END END END END END END END END END END END END
% --------------------------------------------------------------------
function MainFigure_WindowButtonMotionFcn(hObject, eventdata, handles)
% hObject handle to MainFigure (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%h=get(handles.MainFigure,'SelectionType')
function RobotRadius_CreateFcn(hObject, eventdata, handles)
% hObject handle to RobotRadius (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function mainfig_CreateFcn(hObject, eventdata, handles)
% hObject handle to mainfig (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% --- Executes during object creation, after setting all properties.
function MainFigure_CreateFcn(hObject, eventdata, handles)
% hObject handle to MainFigure (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% --- Executes on button press in Start.
% --- Executes during object creation, after setting all properties.
function RobotSingleLength_CreateFcn(hObject, eventdata, handles)
% hObject handle to RobotSingleLength (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes during object creation, after setting all properties.
function SensorMaxValue_CreateFcn(hObject, eventdata, handles)
% hObject handle to SensorMaxValue (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes during object creation, after setting all properties.
function RobotVelocity_CreateFcn(hObject, eventdata, handles)
% hObject handle to RobotVelocity (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function Sensor1Length_Callback(hObject, eventdata, handles)
% hObject handle to Sensor1Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of Sensor1Length as text
% str2double(get(hObject,'String')) returns contents of Sensor1Length as a double
% --- Executes during object creation, after setting all properties.
function Sensor1Length_CreateFcn(hObject, eventdata, handles)
% hObject handle to Sensor1Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function Sensor2Length_Callback(hObject, eventdata, handles)
% hObject handle to Sensor2Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of Sensor2Length as text
% str2double(get(hObject,'String')) returns contents of Sensor2Length as a double
% --- Executes during object creation, after setting all properties.
function Sensor2Length_CreateFcn(hObject, eventdata, handles)
% hObject handle to Sensor2Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function Sensor3Length_Callback(hObject, eventdata, handles)
% hObject handle to Sensor3Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of Sensor3Length as text
% str2double(get(hObject,'String')) returns contents of Sensor3Length as a double
% --- Executes during object creation, after setting all properties.
function Sensor3Length_CreateFcn(hObject, eventdata, handles)
% hObject handle to Sensor3Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function Sensor4Length_Callback(hObject, eventdata, handles)
% hObject handle to Sensor4Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of Sensor4Length as text
% str2double(get(hObject,'String')) returns contents of Sensor4Length as a double
% --- Executes during object creation, after setting all properties.
function Sensor4Length_CreateFcn(hObject, eventdata, handles)
% hObject handle to Sensor4Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function Sensor5Length_Callback(hObject, eventdata, handles)
% hObject handle to Sensor5Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of Sensor5Length as text
% str2double(get(hObject,'String')) returns contents of Sensor5Length as a double
% --- Executes during object creation, after setting all properties.
function Sensor5Length_CreateFcn(hObject, eventdata, handles)
% hObject handle to Sensor5Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function Sensor6Length_Callback(hObject, eventdata, handles)
% hObject handle to Sensor6Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of Sensor6Length as text
% str2double(get(hObject,'String')) returns contents of Sensor6Length as a double
% --- Executes during object creation, after setting all properties.
function Sensor6Length_CreateFcn(hObject, eventdata, handles)
% hObject handle to Sensor6Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function Sensor7Length_Callback(hObject, eventdata, handles)
% hObject handle to Sensor7Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of Sensor7Length as text
% str2double(get(hObject,'String')) returns contents of Sensor7Length as a double
% --- Executes during object creation, after setting all properties.
function Sensor7Length_CreateFcn(hObject, eventdata, handles)
% hObject handle to Sensor7Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function Sensor8Length_Callback(hObject, eventdata, handles)
% hObject handle to Sensor8Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of Sensor8Length as text
% str2double(get(hObject,'String')) returns contents of Sensor8Length as a double
% --- Executes during object creation, after setting all properties.
function Sensor8Length_CreateFcn(hObject, eventdata, handles)
% hObject handle to Sensor8Length (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --------------------------------------------------------------------
function RobotPosX_Callback(hObject, eventdata, handles)
% hObject handle to RobotPosX (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of RobotPosX as text
% str2double(get(hObject,'String')) returns contents of RobotPosX as a double
% --- Executes during object creation, after setting all properties.
function RobotPosX_CreateFcn(hObject, eventdata, handles)
% hObject handle to RobotPosX (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function RobotPosY_Callback(hObject, eventdata, handles)
% hObject handle to RobotPosY (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of RobotPosY as text
% str2double(get(hObject,'String')) returns contents of RobotPosY as a double
% --- Executes during object creation, after setting all properties.
function RobotPosY_CreateFcn(hObject, eventdata, handles)
% hObject handle to RobotPosY (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes on selection change in popupmenu6.
function popupmenu6_Callback(hObject, eventdata, handles)
% hObject handle to popupmenu6 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = get(hObject,'String') returns popupmenu6 contents as cell array
% contents{get(hObject,'Value')} returns selected item from popupmenu6
% --- Executes during object creation, after setting all properties.
function popupmenu6_CreateFcn(hObject, eventdata, handles)
% hObject handle to popupmenu6 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: popupmenu controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function RobotDirection_Callback(hObject, eventdata, handles)
% hObject handle to RobotDirection (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of RobotDirection as text
% str2double(get(hObject,'String')) returns contents of RobotDirection as a double
% --- Executes during object creation, after setting all properties.
function RobotDirection_CreateFcn(hObject, eventdata, handles)
% hObject handle to RobotDirection (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes on button press in Start.
function Start_Callback(hObject, eventdata, handles)
% hObject handle to Start (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on selection change in Tasklistbox.
function Tasklistbox_Callback(hObject, eventdata, handles)
% hObject handle to Tasklistbox (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = get(hObject,'String') returns Tasklistbox contents as cell array
% contents{get(hObject,'Value')} returns selected item from Tasklistbox
% --- Executes during object creation, after setting all properties.
function Tasklistbox_CreateFcn(hObject, eventdata, handles)
% hObject handle to Tasklistbox (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: listbox controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes on selection change in AlgorithmListBox.
function AlgorithmListBox_Callback(hObject, eventdata, handles)
% hObject handle to AlgorithmListBox (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = get(hObject,'String') returns AlgorithmListBox contents as cell array
% contents{get(hObject,'Value')} returns selected item from AlgorithmListBox
% --- Executes during object creation, after setting all properties.
function AlgorithmListBox_CreateFcn(hObject, eventdata, handles)
% hObject handle to AlgorithmListBox (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: listbox controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
A_0064.完整MATLAB程序
matlab源码说明_我爱C编程的博客-CSDN博客
V