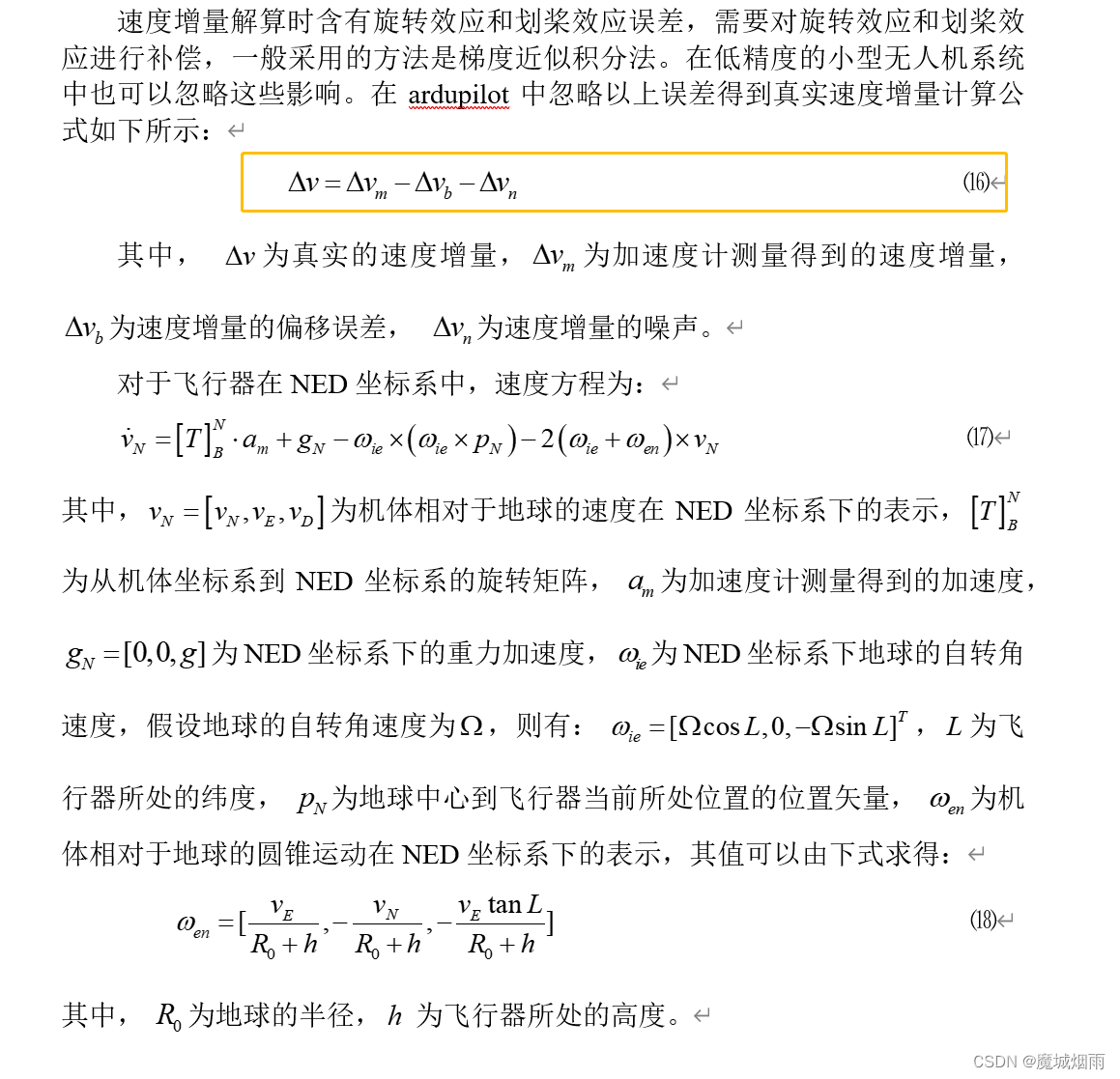
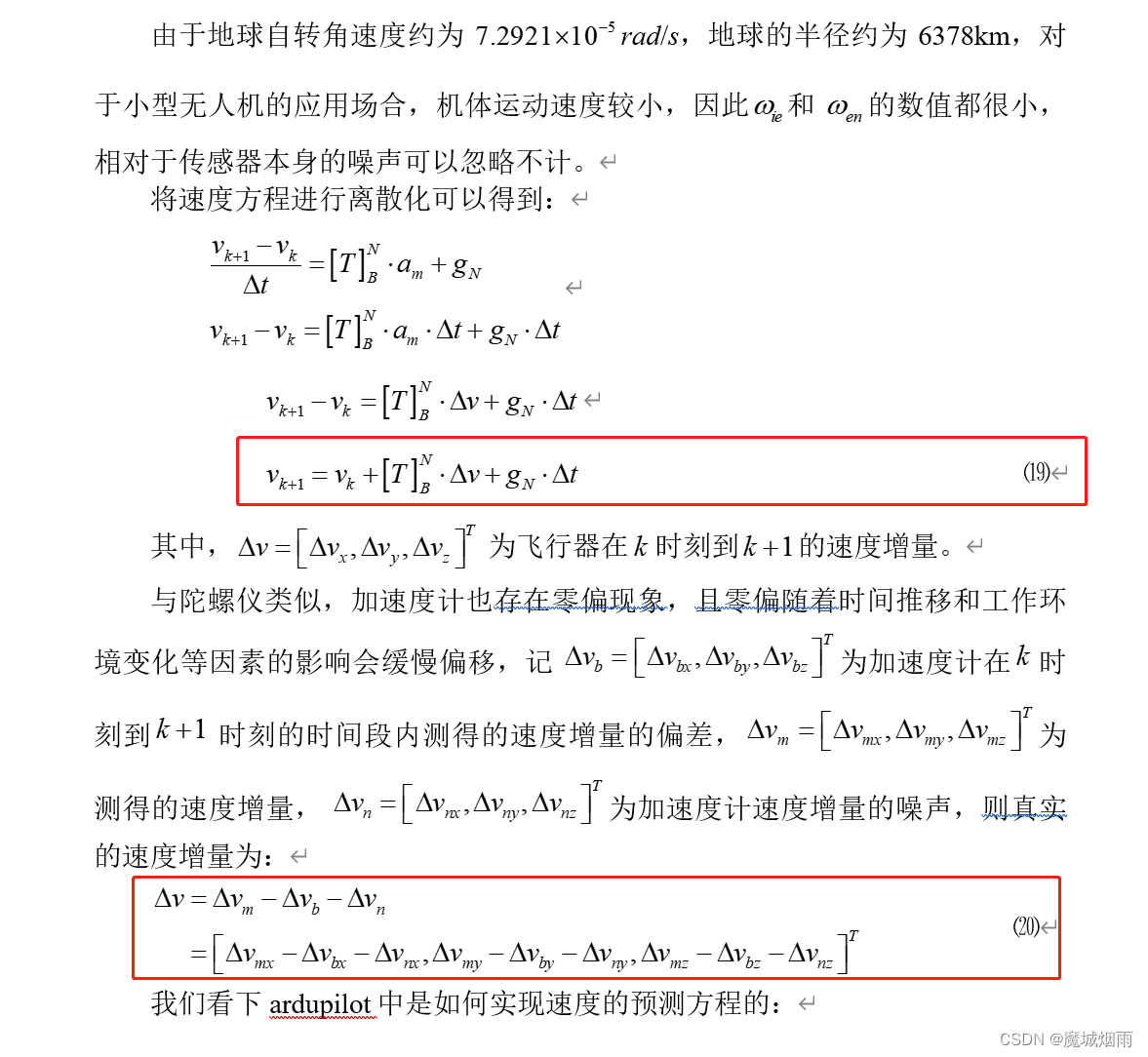
Ardupilot EKF3核心算法《状态量速度与位置预测方程》
news2026/2/13 2:11:25

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/138244.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
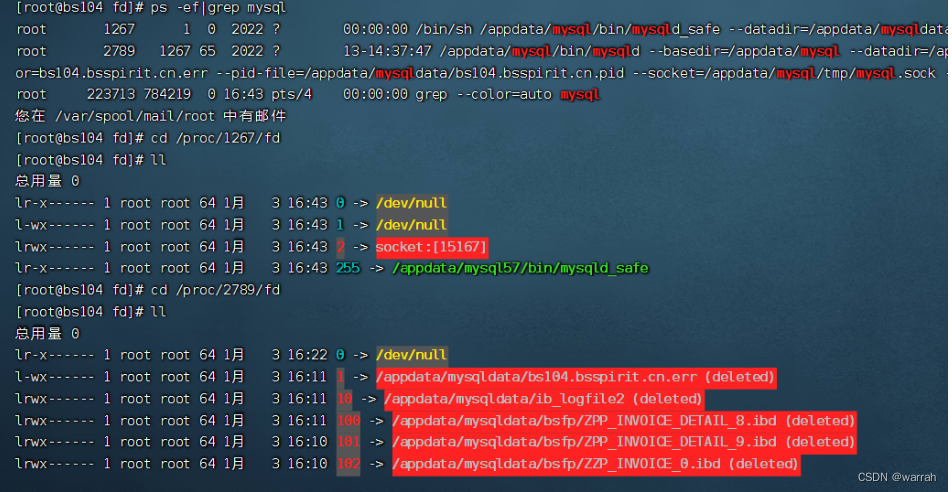
mysql生产数据库被误删
23年的头一天上班安装数据库,因为ssh工具来回切换失误,犯下不可饶恕的错误,居然将生产数据库全部删除,工作十几年头一次干这种蠢事,第一时间反应是一世英名毁于一旦,赶紧跑路。第二反应还是想办法看能否挽回…
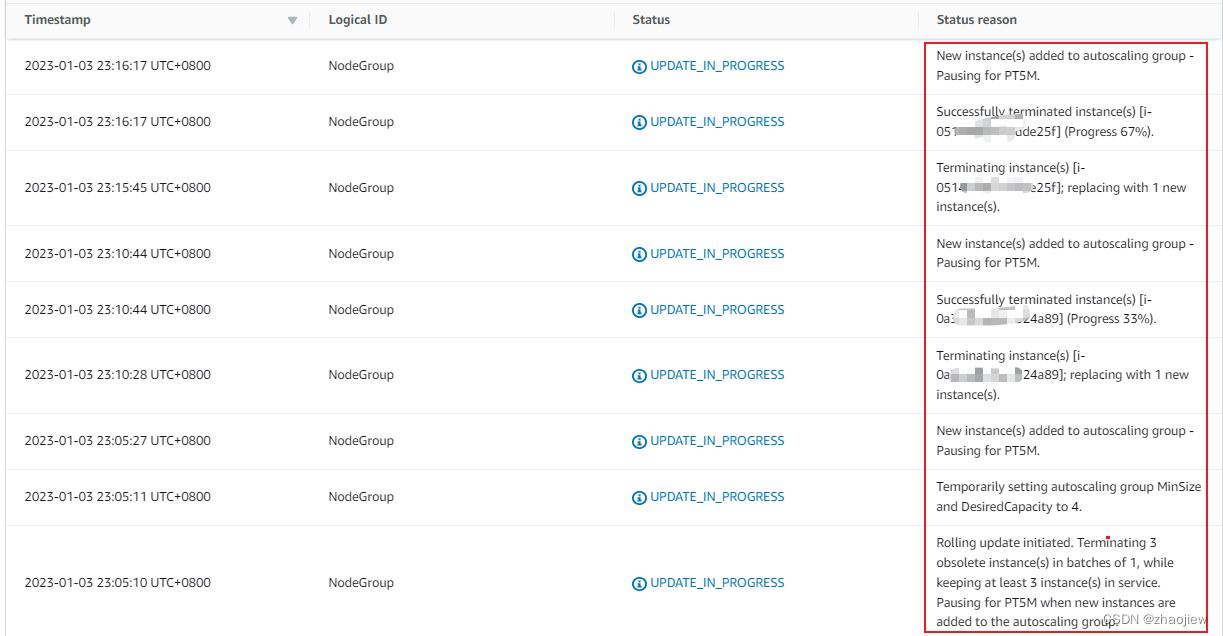
aws eks 使用 cloudformation 创建并更新自管节点组
参考资料
更新现有自行管理的节点组
使用eks自管节点组能够最大程度控制节点的各项配置和参数,包括并不限于ami,节点类型等
但是使用自管节点也给用户带来了较大的维护和更新成本。对于节点组的更新操作,我们可以使用cloudformation的方式…
速览Visual Studio 2022 中的新增功能
目录
性能改进
Visual Studio 2022 为 64 位
在文件中更快地查找
Git 工具速度更快
生成新式应用
适用于 C、.NET 和热重载的更佳开发工具
Blazor & 的汇报ASP.NET 的 Razor 编辑器 热重载
创新触手可及
Git 多存储库支持和行暂存支持
IntelliCode 改进
为每个…
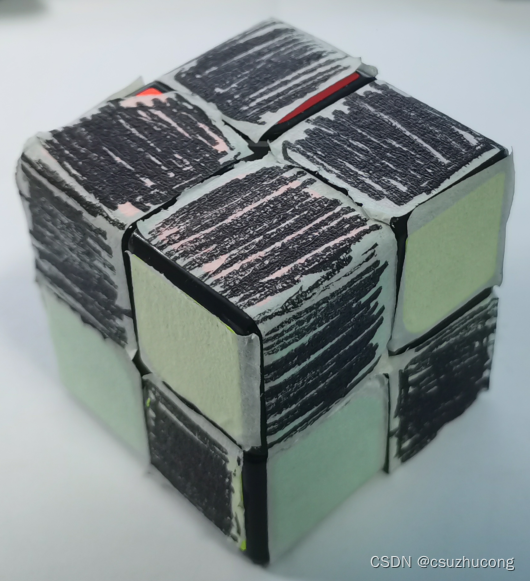
魔方(15)二、三、四、五阶棋盘魔方
棋盘魔方 这价格实在可恶,于是我拿现成的魔方自己贴贴纸。
二阶棋盘魔方A 有4个角块是3面黑,4个角块是3面白,而6个面都是棋盘色。
只需要2步就可以转化成: 所以任意状态只要转化成这个状态再加2步就能复原了。
二阶棋盘魔方B&a…
【C++函数对象】STL基础语法学习 | 仿函数谓词内建仿函数
目录
●仿函数
1.概念
2.使用
●谓词
1.一元谓词
2.二元谓词 ●内建仿函数
1.算数仿函数
2.关系仿函数
3.逻辑仿函数 ●仿函数
1.概念 重载函数调用操作符的类,其对象常称为函数对象。函数对象使用重载的()时,行为类似函数的调用,所…
技术更高,设计更远:华为全屋智能设计大赛的审美之跃
“人生到处知何以?应似飞鸿踏雪泥。泥上偶然留指爪,鸿飞那复计东西。”很多设计师朋友跟我说,苏轼这首《和子由渑池怀旧》是对设计与审美的最高理解。好的设计,应该仅仅留下一点点痕迹,同时在简约的表象下隐含大量的审…

高通平台开发系列讲解(USB篇)USB调试手段汇总说明 - 视频课
文章目录 一、USB AT数据流说明二、BUS Hound 工具说明三、sysfs相关USB调试节点四、USB usbmon工具使用五、USB usbmon日志解析六、UsbTreeView软件的使用七、视频讲解分享沉淀、分享、成长,让自己和他人都能有所收获!😄 📢 碰见USB AT不通怎么办?所以本篇章汇总了高通…
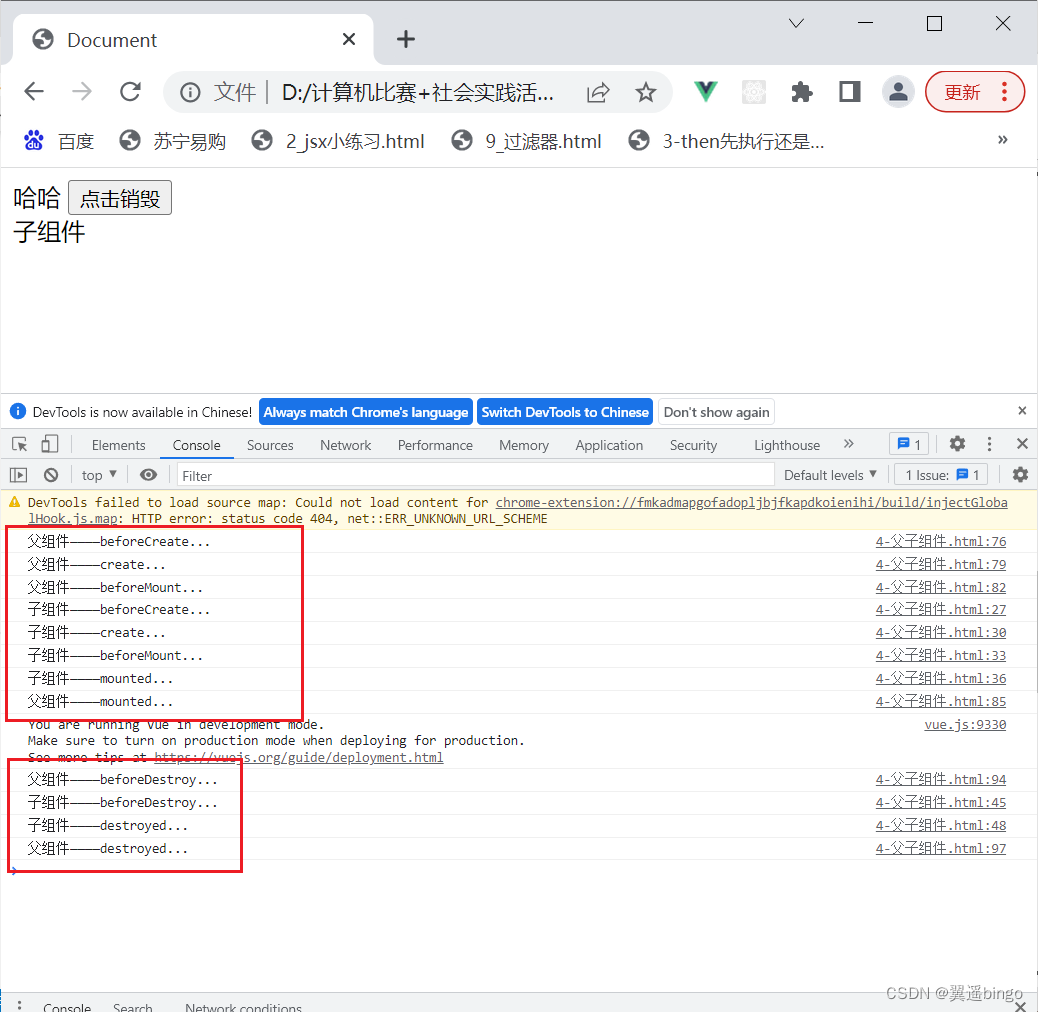
Vue与React中父子组件生命周期的执行顺序?【生命周期详细知识讲解!!!】
文章目录一、 Vue中父子组件生命周期1-1 加载渲染过程1-2 销毁过程1-3 展示案例二、 React中父子组件生命周期2-1 关于React新旧版生命周期介绍2-2 父子组件生命周期2-2-1 父子组件初始化2-2-2 子组件修改自身state2-2-3 父组件修改props2-2-4 卸载子组件一、 Vue中父子组件生命…
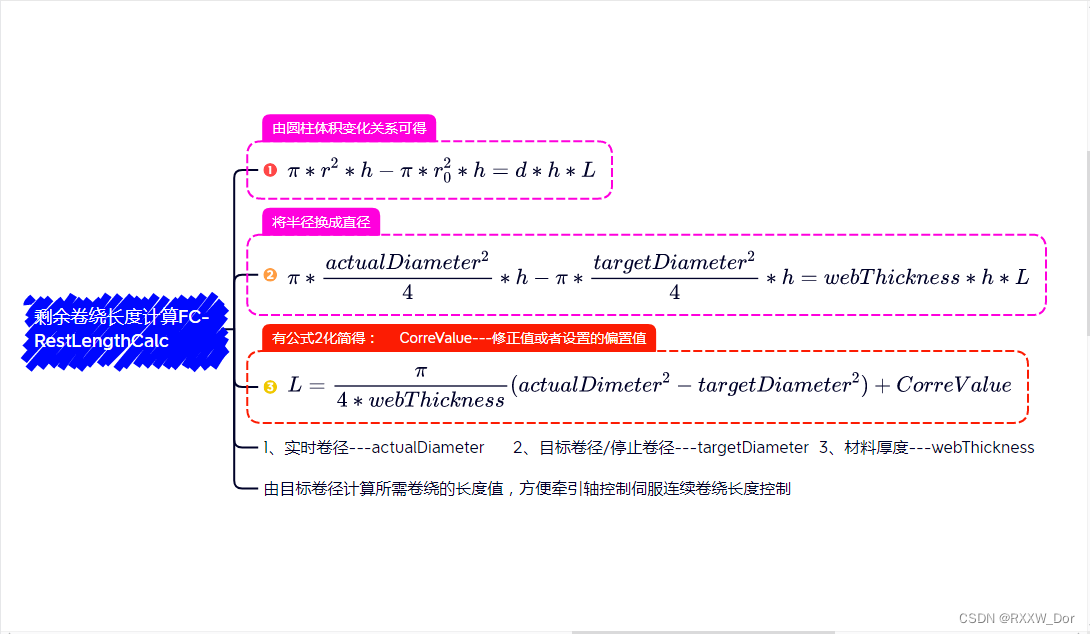
卷绕剩余长度计算FC(收放卷应用)
卷径实时计算方法详细内容请参看下面的文章链接:
卷径计算详解(通过卷绕的膜长和膜厚进行计算)_RXXW_Dor的博客-CSDN博客有关卷绕+张力控制可以参看专栏的系列文章,文章链接如下:变频器简单张力控制(线缆收放卷应用)_RXXW_Dor的博客-CSDN博客_收放卷应用张力控制的开闭环…
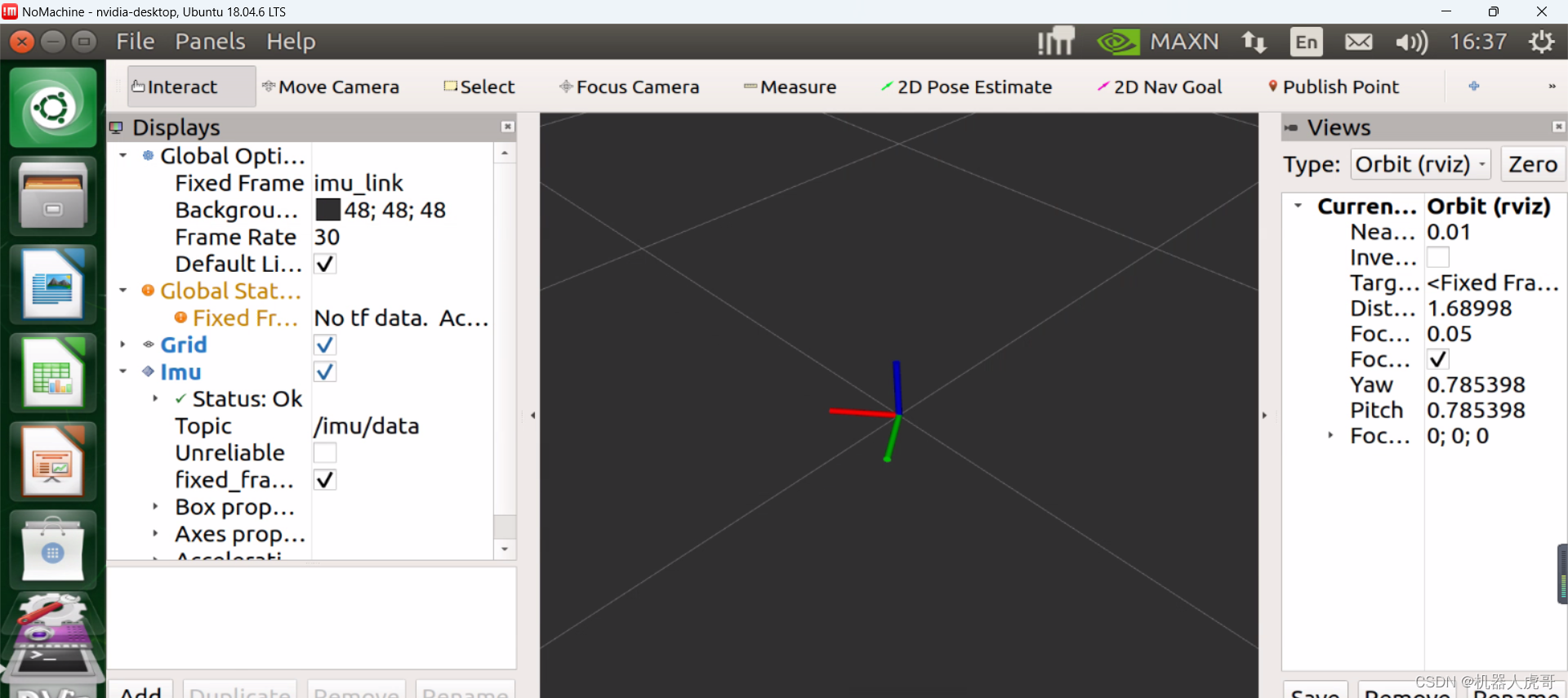
【EHub_tx1_tx2_E100】Ubuntu18.04 + ROS_ Melodic + LingAo IMU 测试及RVIZ展示
简介:介绍LingAo 的6自由度IMU模块 在EHub_tx1_tx2_E100载板,TX1核心模块环境(Ubuntu18.04)下测试ROS驱动,打开使用RVIZ 查看IMU数据,本文的前提条件是你的TX1里已经安装了ROS版本:Melodic。
关…
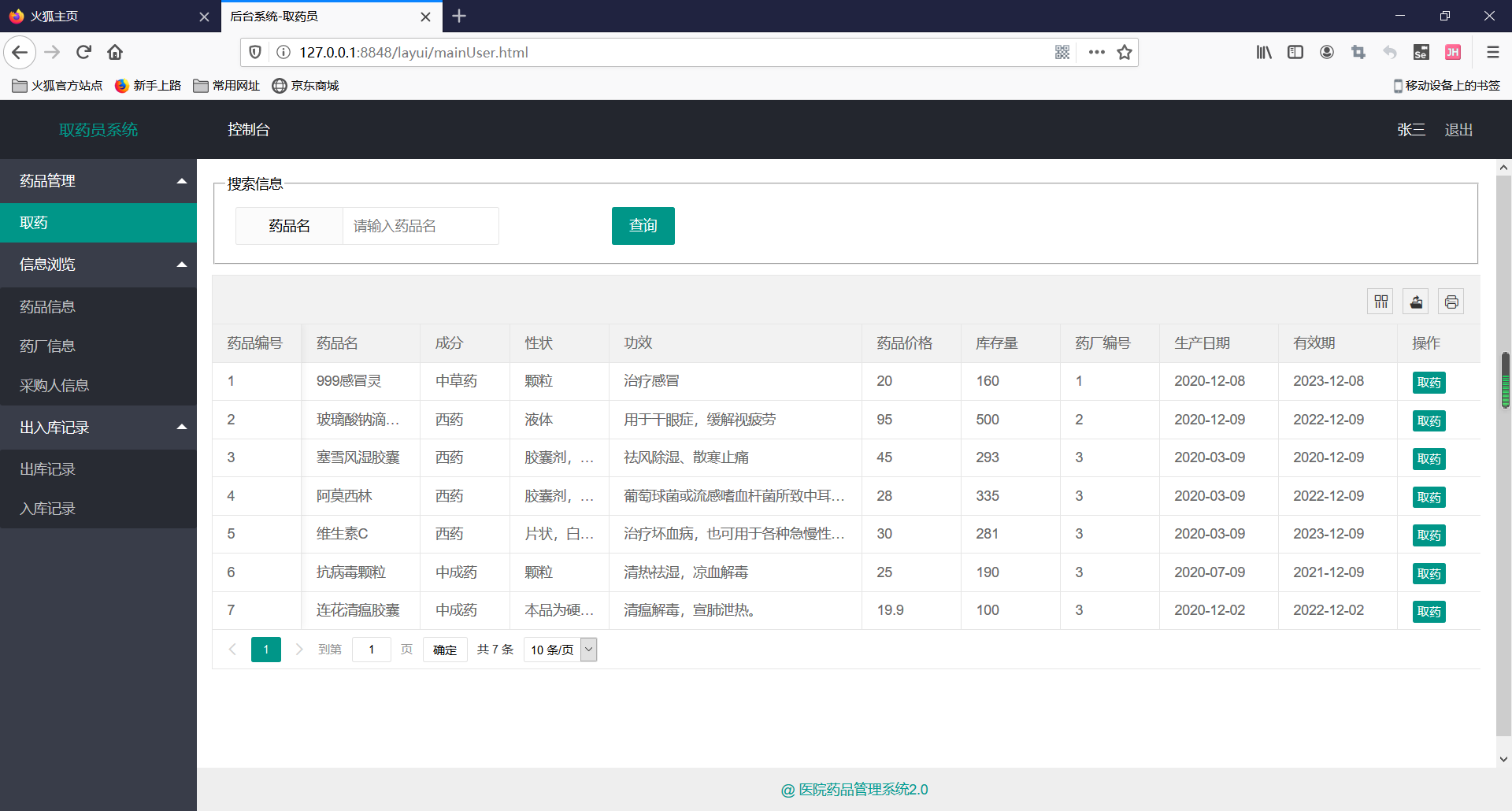
Spring Boot+Mybatis+layui框架实现的前后端分离的医院药品管理系统源码+数据库
springboot layui药品管理系统
介绍
前后端分离的药品管理系统。 完整代码下载地址:Spring BootMybatislayui框架实现的前后端分离的医院药品管理系统源码数据库
软件架构
前端:layui框架
后端:Spring BootMybatis
数据库:…


虹科分享 | 如何解决CAN与以太网之间的信息有效传递与智能变送难题?
背景
在工业中,一般把现场总线应用于车间、生产现场等生产第一线,作为控制网络,而以太网主要应用于企业管理层和生产监控层。由于不同现场总线之间没有统一标准、难以接入因特网等缺点,使得目前大部分企业控制网络与信息网络相互…

猎聘和BOSS直聘谁会成为在线招聘的最后赢家?
文|螳螂观察
作者|易不二
在线招聘行业正在焕发新的巨大活力。
12月22日,BOSS直聘正式在港交所主板完成双重主要上市。BOSS直聘创始人赵鹏扬言,公司未来三年内有一个获取一亿用户的“小目标”,纯蓝领市场是公司完成这一目标的重要增长动力…
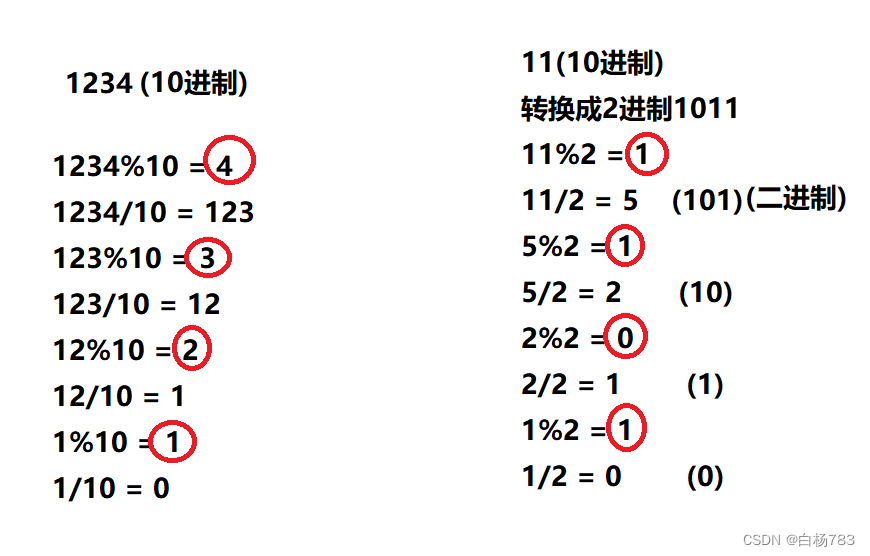
移位操作符和位操作符(从概念到相关算法题详解)
目录 概念
基础知识
左移操作符(<<)
右移操作符(>>)
按位与(&)
按位或(|)
异或(^)
相关算法题
1.不能创建临时变量(第三个变量),实现俩个数的交换
方法1:
方法2:
写一个方法,返回参数中二进制中1的个数
方法1:
方法2:
方法3:
俩个int(32位)整…
2019年数维杯国际大学生数学建模C题猪肉价格波动分析求解全过程文档及程序
2019年数维杯国际大学生数学建模
C题 猪肉价格波动分析
问题重述: 中国是一个育种大国。猪肉产业在畜牧业中起着主导作用。同时,猪肉已成为人们餐桌上的主要肉类来源之一。随着人口的增加,消费和生活也得到了改善。 2018年8月3日࿰…

Android Studio中设置Compose 代码模版
File Templates
有两种方式能找到编辑File Templates的入口 在 File -> New -> Edit File Templates 或者 在项目结构目录中点击右键菜单 New -> Edit File Templates 在设置界面中的 Editor -> File and Code Templates
#if (${PACKAGE_NAME} && ${…
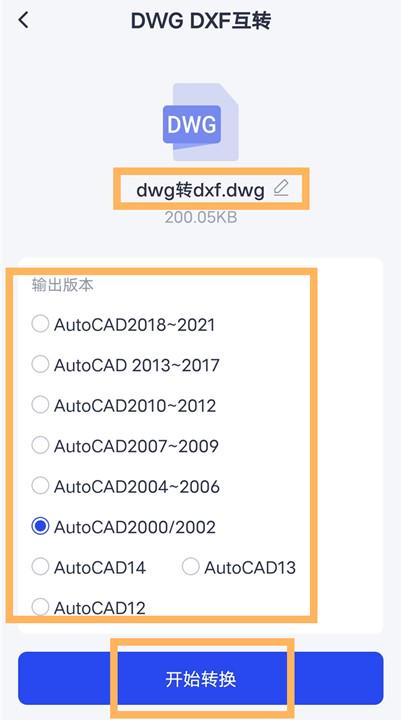
dwg怎么转成dxf格式?手机也能轻松操作
dwg怎么转成dxf格式呢?相信很多小伙伴应该知道这两种格式都是CAD图纸中的一种,那么它们有什么区别呢?第一,性质不同dwg图形文件是计算机辅助设计软件AutoCAD用来保存设计数据的专有文件格式。dxf图形文件是DWG格式的ASCII格式变体…
Codeforces Global Round 14 E Phoenix and Computers
大意:
一排电脑,每次可以选择打开一台电脑,如果某一台电脑相邻的左边和右边都被打开了,它会自动打开。问打开n台电脑的方案数
思路:
O(n^3)做法
不难发现,在操作过程中,一台台电脑其实就是被…