Ikdtree算法来自fast-lio2 其中i是incremental的缩写,表示增量的kdtree。
Ikdtree算法来自fast-lio2 其中i是incremental的缩写,表示增量的kdtree。

Ikdtree算法来自fast-lio2 其中i是incremental的缩写,表示增量的kdtree。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
其最主要的特点就是支持高效的插入和删除操作,并且使用双线程来对kdtree进行重建。依据我的第一理解,其从算法层面对kdtree进行改进,使其计算效率提升,来解决插入和删除操作的问题。

编辑切换为居中
添加图片注释,不超过 140 字(可选)
没看懂,接下来看一下论文和网上的博客。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
本文提出了一种有效的用于动态空间划分的数据结构ikd-Tree。ikd-Tree只用新的即将到来的点增量地更新k-d树,这导致的计算时间比现有的静态k-d树要低得多。除了点级操作外,ikd-Tree还支持一些特性,如箱形操作和降采样,这些特性在机器人应用中实际有用。与增量操作(即插入、重新插入和删除)并行,ikd-Tree主动监视树结构并部分重新平衡树,这可以在后期阶段实现有效的最近点搜索。ikd-Tree经过精心设计,支持多线程并行计算,以提高整体效率。我们在理论和实际实验中都验证了ikd树的有效性。在理论层面上,提出了一个完整的时间复杂度分析,证明了其有效性。在实验水平上,在激光雷达-惯性测程和映射应用中,在随机数据集和真实世界的激光雷达点数据上对ikd-树进行了测试。在所有测试中,ikd-Tree只消耗了静态k-d树中运行时间的4%。
k维树(K-D树)是一种高效的数据结构,它可以组织多维点数据[1],能够快速搜索最近的邻居,这是各种机器人应用[2]中广泛需要的基本操作。例如,在激光雷达测程法和映射中,基于k-d树的最近点搜索对于匹配新的激光雷达扫描中的一个点与其映射(或之前的扫描)[3]-[8]中的对应点是至关重要的。最近点搜索在点云上快速障碍碰撞检查的运动规划中也很重要,如[9]-[14]。
Introduction第一段介绍了kdtree的重要性,其在激光slam中起着非常重要的作用,常用于搜索近邻点。并且其在游戏领域,其常被用来进行碰撞检测。然后kdtree和八叉树也可以交互使用,首先使用八叉树进行粗定位,然后再用kdtree进行精定位。
在机器人应用程序[15]中,常用的k-d树结构是“静态的”,其中树是使用所有点从头开始构建的。这与数据在实际的机器人应用程序中通常是按顺序获得的事实相矛盾。在这种情况下,通过从头开始重新构建整个树,将一个新的数据框架合并到现有的数据框架中,通常是非常低效和耗时的。因此,k-d树通常在一个低频的[5]-[7]上进行更新,或者简单地只在新的点[11,12]上重新构建。
Introduction第二段,说明静态kdtree是非常慢的,因此本文提出了ikdtree即动态kdtree来进行更高效的运算。
接下来论文讲解了ikdtree的算法结构和复杂度,这里就不提起了,感兴趣的读者可以自行搜索论文进行阅读。
一个疑惑:
编辑切换为居中
添加图片注释,不超过 140 字(可选)

编辑
添加图片注释,不超过 140 字(可选)

编辑切换为居中
添加图片注释,不超过 140 字(可选)
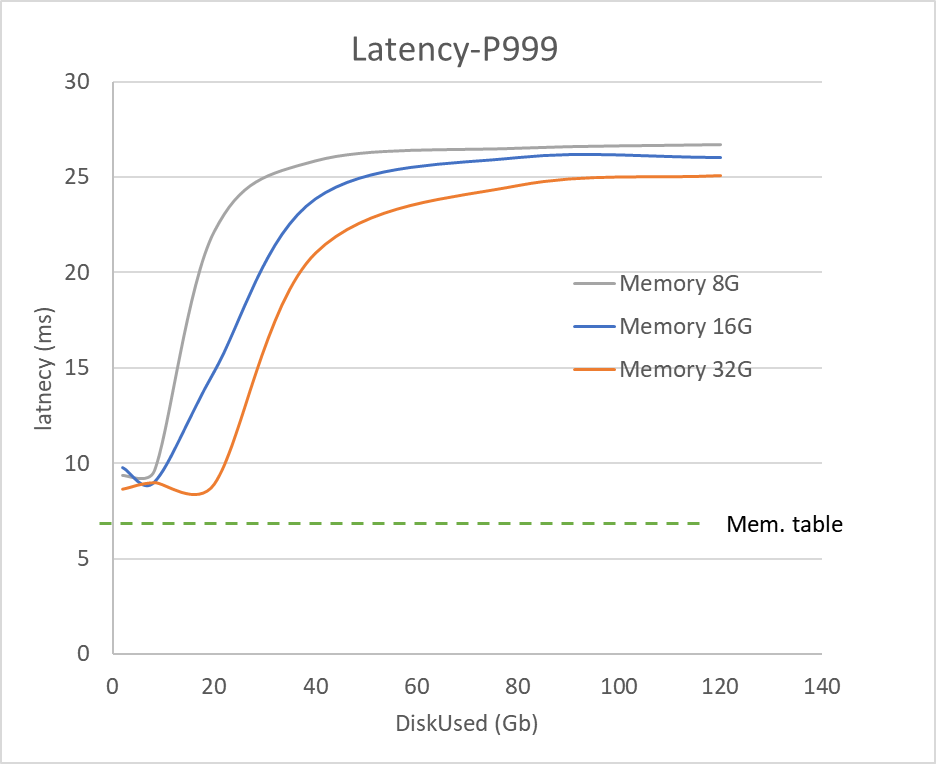
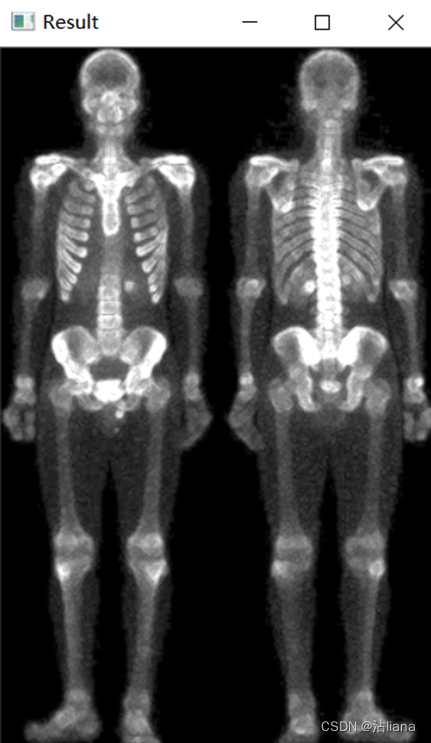
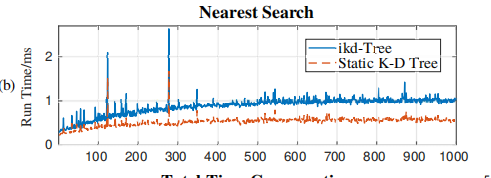
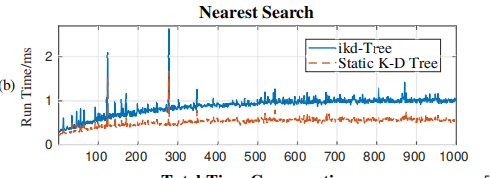
这些图片都是从实验部分截下来的。。。是我的电脑问题么。。。 我怎么感觉这些图片 好像是p上去的呢???
编辑
添加图片注释,不超过 140 字(可选)
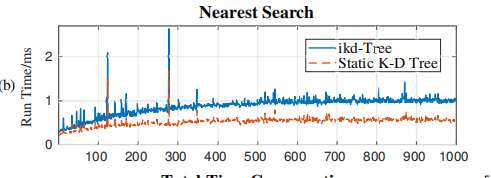
还有ikdtree竟然在NS中输给了KDtree,并且作者说是因为pcl库对kdtree的优化太好了,然后导致了ikdtree没有在此项实验中取得胜利 。。。 我真的很谢。。。 现在的感觉的话 可能这个ikdtree能否真正应用在激光SLAM领域中的话 还得需要一个实际验证。
附赠一篇大佬写的博客:https://zhuanlan.zhihu.com/p/529926254
编辑切换为居中
添加图片注释,不超过 140 字(可选)
其最主要的特点就是支持高效的插入和删除操作,并且使用双线程来对kdtree进行重建。依据我的第一理解,其从算法层面对kdtree进行改进,使其计算效率提升,来解决插入和删除操作的问题。

编辑切换为居中
添加图片注释,不超过 140 字(可选)
没看懂,接下来看一下论文和网上的博客。

编辑切换为居中
添加图片注释,不超过 140 字(可选)
本文提出了一种有效的用于动态空间划分的数据结构ikd-Tree。ikd-Tree只用新的即将到来的点增量地更新k-d树,这导致的计算时间比现有的静态k-d树要低得多。除了点级操作外,ikd-Tree还支持一些特性,如箱形操作和降采样,这些特性在机器人应用中实际有用。与增量操作(即插入、重新插入和删除)并行,ikd-Tree主动监视树结构并部分重新平衡树,这可以在后期阶段实现有效的最近点搜索。ikd-Tree经过精心设计,支持多线程并行计算,以提高整体效率。我们在理论和实际实验中都验证了ikd树的有效性。在理论层面上,提出了一个完整的时间复杂度分析,证明了其有效性。在实验水平上,在激光雷达-惯性测程和映射应用中,在随机数据集和真实世界的激光雷达点数据上对ikd-树进行了测试。在所有测试中,ikd-Tree只消耗了静态k-d树中运行时间的4%。
k维树(K-D树)是一种高效的数据结构,它可以组织多维点数据[1],能够快速搜索最近的邻居,这是各种机器人应用[2]中广泛需要的基本操作。例如,在激光雷达测程法和映射中,基于k-d树的最近点搜索对于匹配新的激光雷达扫描中的一个点与其映射(或之前的扫描)[3]-[8]中的对应点是至关重要的。最近点搜索在点云上快速障碍碰撞检查的运动规划中也很重要,如[9]-[14]。
Introduction第一段介绍了kdtree的重要性,其在激光slam中起着非常重要的作用,常用于搜索近邻点。并且其在游戏领域,其常被用来进行碰撞检测。然后kdtree和八叉树也可以交互使用,首先使用八叉树进行粗定位,然后再用kdtree进行精定位。
在机器人应用程序[15]中,常用的k-d树结构是“静态的”,其中树是使用所有点从头开始构建的。这与数据在实际的机器人应用程序中通常是按顺序获得的事实相矛盾。在这种情况下,通过从头开始重新构建整个树,将一个新的数据框架合并到现有的数据框架中,通常是非常低效和耗时的。因此,k-d树通常在一个低频的[5]-[7]上进行更新,或者简单地只在新的点[11,12]上重新构建。
Introduction第二段,说明静态kdtree是非常慢的,因此本文提出了ikdtree即动态kdtree来进行更高效的运算。
接下来论文讲解了ikdtree的算法结构和复杂度,这里就不提起了,感兴趣的读者可以自行搜索论文进行阅读。
一个疑惑:

编辑切换为居中
添加图片注释,不超过 140 字(可选)

编辑
添加图片注释,不超过 140 字(可选)

编辑切换为居中
添加图片注释,不超过 140 字(可选)
这些图片都是从实验部分截下来的。。。是我的电脑问题么。。。 我怎么感觉这些图片 好像是p上去的呢???
编辑
添加图片注释,不超过 140 字(可选)
还有ikdtree竟然在NS中输给了KDtree,并且作者说是因为pcl库对kdtree的优化太好了,然后导致了ikdtree没有在此项实验中取得胜利 。。。 我真的很谢。。。 现在的感觉的话 可能这个ikdtree能否真正应用在激光SLAM领域中的话 还得需要一个实际验证。
附赠一篇大佬写的博客:https://zhuanlan.zhihu.com/p/529926254
编辑切换为居中
添加图片注释,不超过 140 字(可选)
其最主要的特点就是支持高效的插入和删除操作,并且使用双线程来对kdtree进行重建。依据我的第一理解,其从算法层面对kdtree进行改进,使其计算效率提升,来解决插入和删除操作的问题。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
没看懂,接下来看一下论文和网上的博客。

编辑切换为居中
添加图片注释,不超过 140 字(可选)
本文提出了一种有效的用于动态空间划分的数据结构ikd-Tree。ikd-Tree只用新的即将到来的点增量地更新k-d树,这导致的计算时间比现有的静态k-d树要低得多。除了点级操作外,ikd-Tree还支持一些特性,如箱形操作和降采样,这些特性在机器人应用中实际有用。与增量操作(即插入、重新插入和删除)并行,ikd-Tree主动监视树结构并部分重新平衡树,这可以在后期阶段实现有效的最近点搜索。ikd-Tree经过精心设计,支持多线程并行计算,以提高整体效率。我们在理论和实际实验中都验证了ikd树的有效性。在理论层面上,提出了一个完整的时间复杂度分析,证明了其有效性。在实验水平上,在激光雷达-惯性测程和映射应用中,在随机数据集和真实世界的激光雷达点数据上对ikd-树进行了测试。在所有测试中,ikd-Tree只消耗了静态k-d树中运行时间的4%。
k维树(K-D树)是一种高效的数据结构,它可以组织多维点数据[1],能够快速搜索最近的邻居,这是各种机器人应用[2]中广泛需要的基本操作。例如,在激光雷达测程法和映射中,基于k-d树的最近点搜索对于匹配新的激光雷达扫描中的一个点与其映射(或之前的扫描)[3]-[8]中的对应点是至关重要的。最近点搜索在点云上快速障碍碰撞检查的运动规划中也很重要,如[9]-[14]。
Introduction第一段介绍了kdtree的重要性,其在激光slam中起着非常重要的作用,常用于搜索近邻点。并且其在游戏领域,其常被用来进行碰撞检测。然后kdtree和八叉树也可以交互使用,首先使用八叉树进行粗定位,然后再用kdtree进行精定位。
在机器人应用程序[15]中,常用的k-d树结构是“静态的”,其中树是使用所有点从头开始构建的。这与数据在实际的机器人应用程序中通常是按顺序获得的事实相矛盾。在这种情况下,通过从头开始重新构建整个树,将一个新的数据框架合并到现有的数据框架中,通常是非常低效和耗时的。因此,k-d树通常在一个低频的[5]-[7]上进行更新,或者简单地只在新的点[11,12]上重新构建。
Introduction第二段,说明静态kdtree是非常慢的,因此本文提出了ikdtree即动态kdtree来进行更高效的运算。
接下来论文讲解了ikdtree的算法结构和复杂度,这里就不提起了,感兴趣的读者可以自行搜索论文进行阅读。
一个疑惑:
编辑切换为居中
添加图片注释,不超过 140 字(可选)
编辑
添加图片注释,不超过 140 字(可选)
编辑切换为居中
添加图片注释,不超过 140 字(可选)
这些图片都是从实验部分截下来的。。。是我的电脑问题么。。。 我怎么感觉这些图片 好像是p上去的呢???
编辑
添加图片注释,不超过 140 字(可选)
还有ikdtree竟然在NS中输给了KDtree,并且作者说是因为pcl库对kdtree的优化太好了,然后导致了ikdtree没有在此项实验中取得胜利 。。。 我真的很谢。。。 现在的感觉的话 可能这个ikdtree能否真正应用在激光SLAM领域中的话 还得需要一个实际验证。
附赠一篇大佬写的博客:https://zhuanlan.zhihu.com/p/529926254