作者:朱金灿
来源:clever101的专栏
为什么大多数人学不会人工智能编程?>>> 

slam是一门集硬件和软件的多科学技术,涉及到很多技术术语、概念以及数学公式等等。下面我将结合网上资料以及个人理解进行介绍。
什么叫云台
云台是安装、固定手机、相机、摄像机的支撑设备,分为固定和电动云台两种。云台可以任意旋转,方便使用者使用。
怎么理解云台?首先它是一种设备载体,在它上面可以搭建一些电子设备,其次它是可以旋转的,可以远程控制的。
什么叫IMU
惯性测量单元(英文:Inertial measurement unit,简称IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。一般情况,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺仪,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺仪检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。在导航中有着很重要的应用价值。
简单来说大家可以把IMU理解为一种传感器,它收集的数据就是物体在三维空间中的角速度和加速度。
什么叫鲁棒性
鲁棒性的英文是robustness,其实是稳健性或稳定性的意思,个人认为翻译为稳定性更好,但大家都这么叫,可能是音译。鲁棒性一般用来描述某个东西的稳定性,就是说在遇到某种干扰时,这个东西的性质能够比较稳定。举个例子,比如统计里面的均值和中位数,均值很容易受到极端值的影响,如果数据里面有很大或很小的数值,均值会偏大或偏小。而中位数就稳定的多,即使数据里面有很大或很小的数值,中位数也不会发生很大变化。所以,中位数这个统计量便具有鲁棒性。
这可算是国内瞎几把翻译的典型案例了。确实应该翻译为稳定性。事物的某种特性的鲁棒性好,就是说这种性质抗原始统计数据的异常数据干扰能力强。
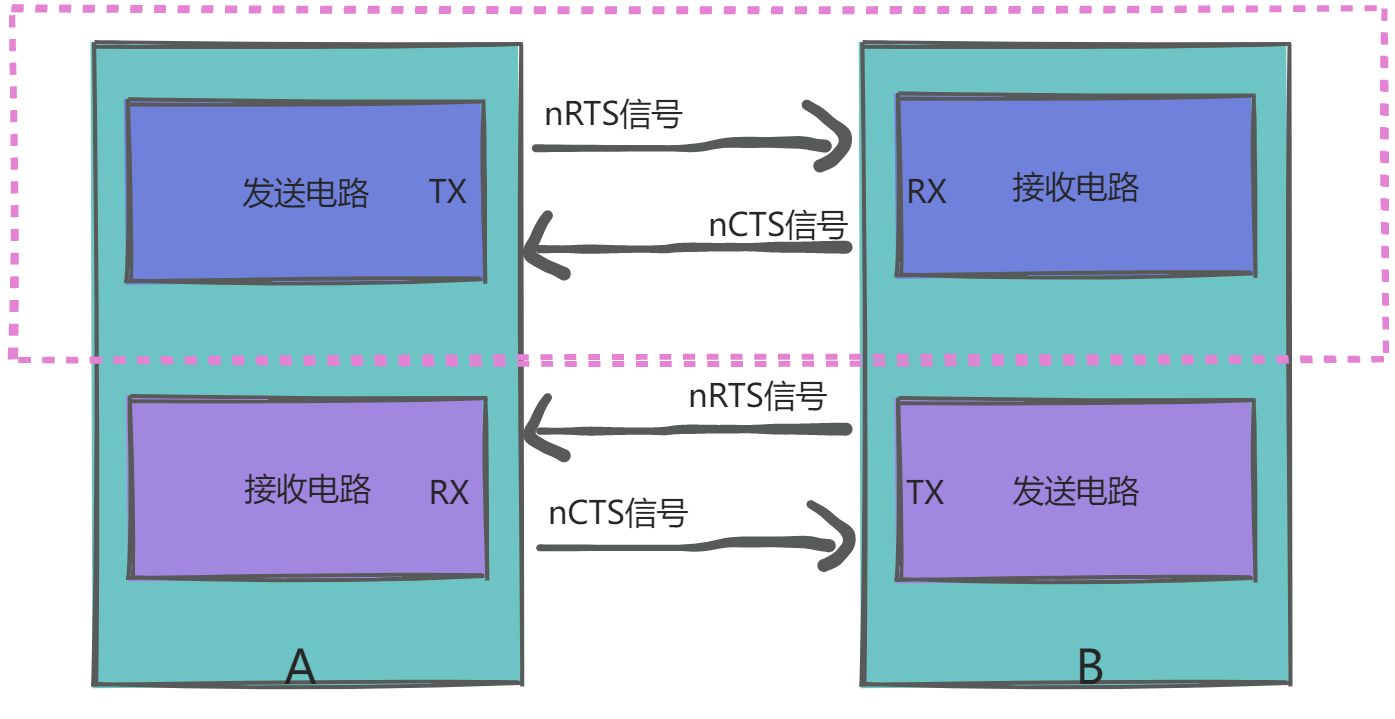
什么叫硬件时间同步
在进行机器人进行slam的时候往往单一的传感器不能实现强鲁棒性,很多时候需要用到多个传感器的融合,例如激光雷达+相机+IMU+GPS+轮速计+毫米波雷达等等。传感器的融合就涉及到一个时间同步的问题,具体来说就是比如激光雷达在17:01:59这个时刻产生的数据得跟IMU在17:01:59这个时刻的产生的数据融合在一起,而激光雷达和IMU都有记录时间的数据,以哪个为准呢?这就是时间同步的问题。网上有一个解决方案:多源传感器融合时的时间对齐或者时间同步问题