以代码的方式复习考研数据结构知识点,这里在考研不以代码为重点,而是以实现过程为重点
文章目录
- 1. 最短路径
- 2. 单源最短路径
- ⅠDijkstra算法
- C++代码
- 3. 多源最短路径
- Ⅰ Floyd-Warshall算法
- C++代码
1. 最短路径
图的生成树针对的是无向图,图的最短路径一般是针对的是有向图。
之前介绍的利用广度优先搜索查找最短路径只是对无权图而言的
当图是带权图时,把从一个顶点a到图中其余任意一个顶点x的一条路径(可能不止一条)所经过边上的权值之和,定义为该路径的带权路径长度,把带权路径长度最短的那条路径称为最短路径.
求解最短路径的算法通常都依赖于一种性质,即两点之间的最短路径也包含了路径上其他顶点间的最短路径。
带权有向图G的最短路径问题一般可分为两类∶
- 是单源最短路径,即求图中某一顶点到其他各顶点的最短路径,可通过经典的 Dijkstra(迪杰斯特拉),Bellman-Ford()算法求解
- 是多源最短路径,即求每对顶点间的最短路径,可通过Floyd(弗洛伊德)算法来求解
2. 单源最短路径
单源最短路径问题:给定一个有向图G = < V , E > ,求源结点s ∈ V到图中每个结点v ∈ V 的最短路径给一个点A,A点到图的其他点的最短路径。
ⅠDijkstra算法
Dijkstra算法适用于解决带权重的有向图上的单源最短路径问题,同时算法要求图中所有边的权重非负。一般在求解最短路径的时候都是已知一个起点 和一个终点,所以使用Dijkstra算法求解过后也就得到了所需起点到终点的最短路径。
如果出现权值为负数的单源最短路径问题,只能使用Bellman-Ford算法。
算法思路:C语言中文网
eg:
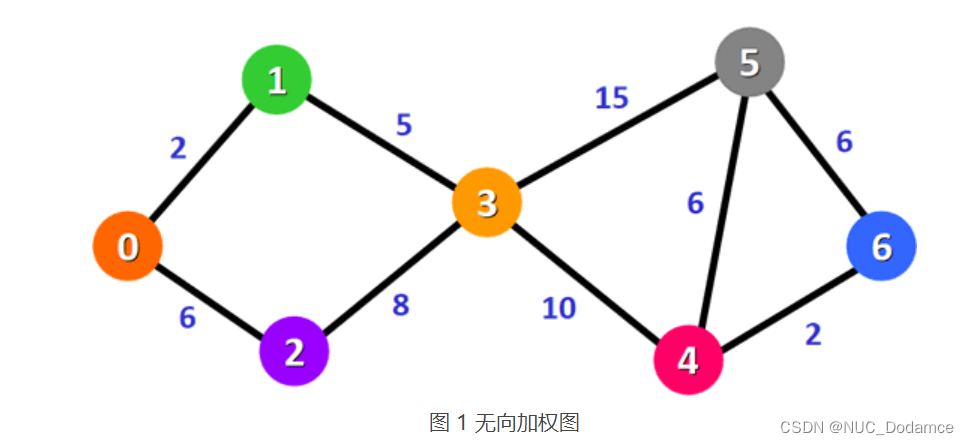
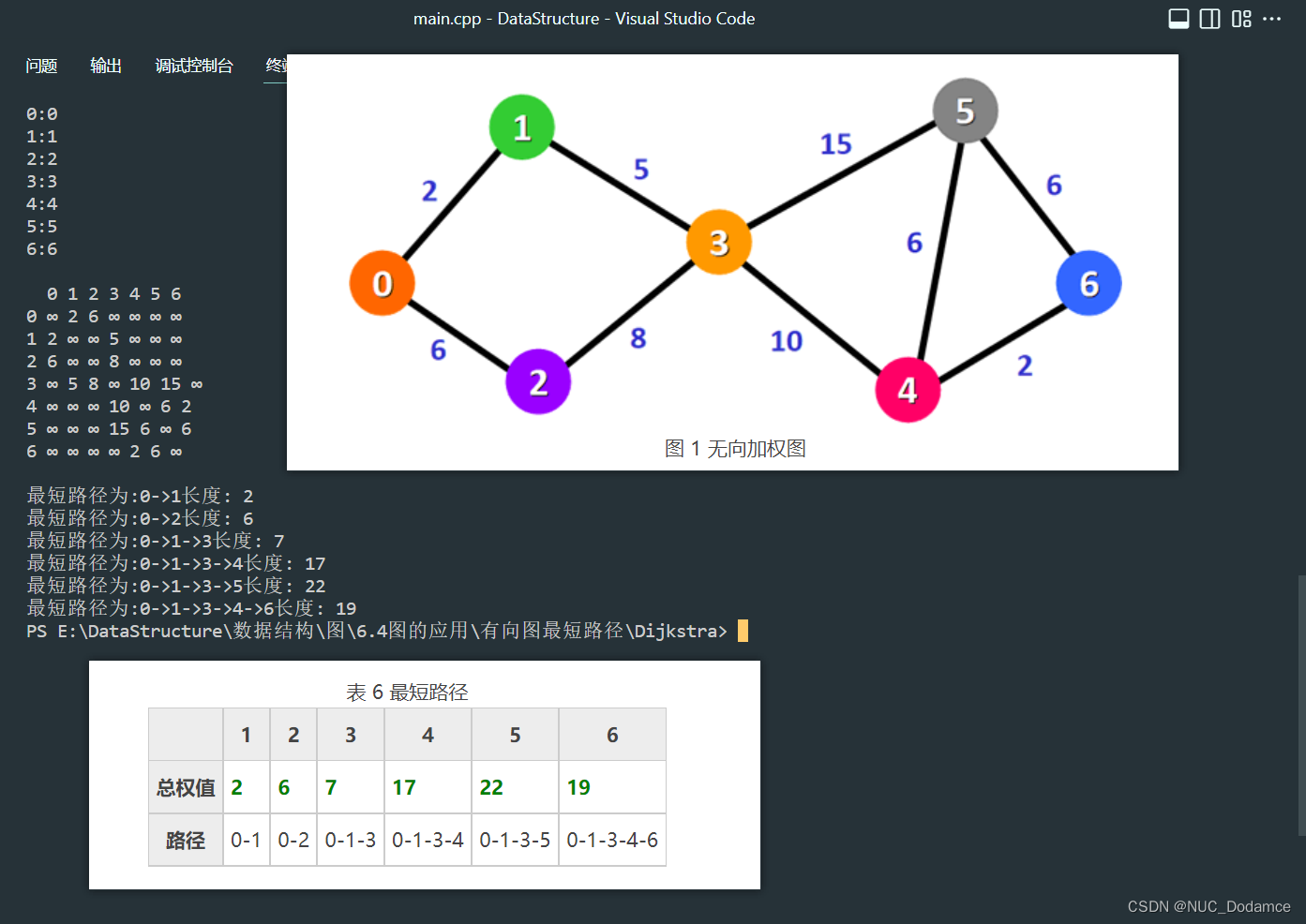
如上图,假设需要统计顶点0到其他顶点的最短路径
如果两个顶点之间无法直达,对应的权值为无穷大,用∞ 表示
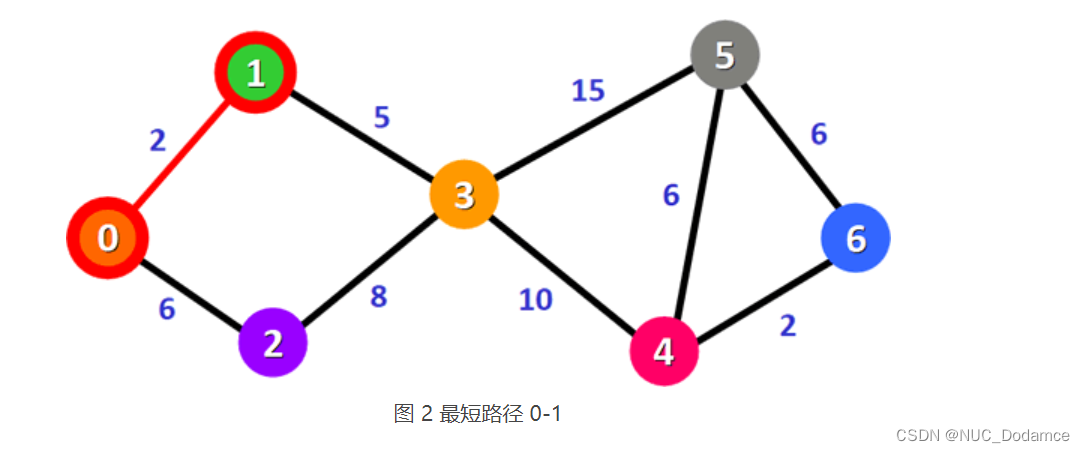
- 统计从顶点 0 直达其它顶点的权值

- 表 1 中,权值最小的是 0-1 路径,它也是从顶点 0 到顶点 1 的最短路径(如图 2 所示)。原因很简单,从顶点 0 出发一共只有 0-1 和 0-2 两条路径,0-2 的权值本就比 0-1 大,所以从 0-2 出发不可能找得到比 0-1 权值更小的路径
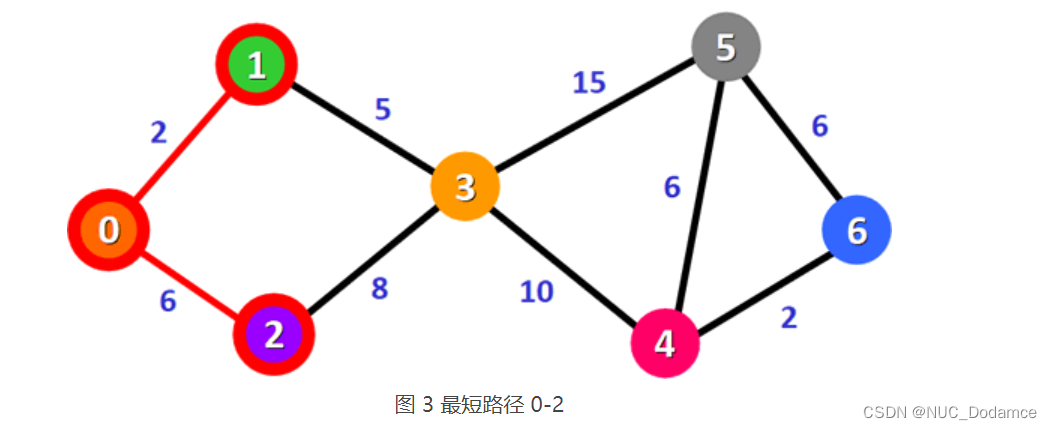
- 找到最短路径 0-1 后,沿 0-1 路径方向查找更短的到达其它顶点的路径,并对表 1 进行更新。

更新后的表格如表 2 所示,沿 0-1 路径可以到达顶点 3,且 0-1-3 的总权值比 0-3 更小。表 2 中,总权值最小的路径是 0-2,它也是从顶点 0 到顶点 2 的最短路径,如下图所示
- 重复之前的操作,沿 0-2 路径方向查找更短的到达其它顶点的路径。遗憾地是,从顶点 2 只能到达顶点 3,且 0-2-3 的总权值比表 2 中记录的 0-1-3 更大,因此表 2 中记录的数据维持不变。

总权值最小的是 0-1-3,它也是顶点 0 到顶点 3 的最短路径。
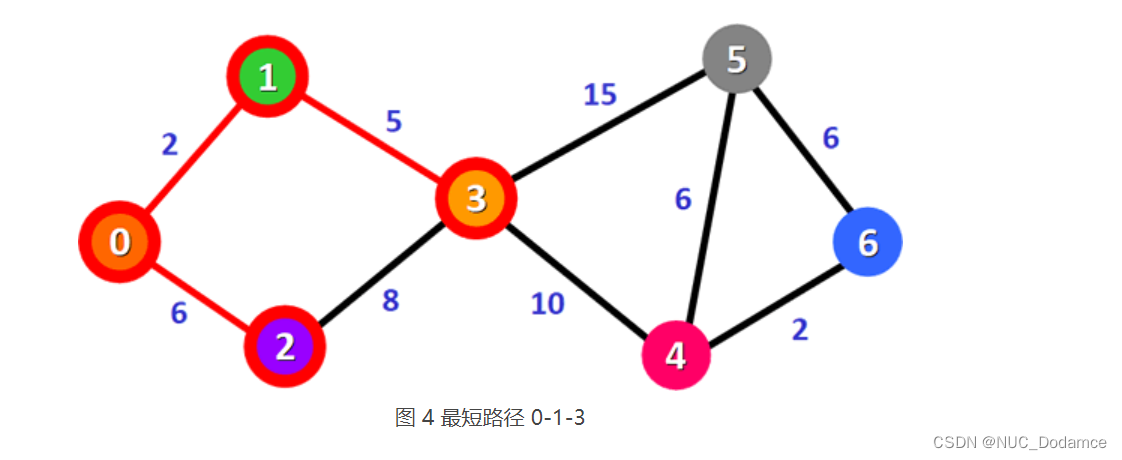
沿 0-1-3 路径方向,查找到其它顶点更短的路径并更新表 3。更新后的表格为:

- 表 4 中,总权值最小的是 0-1-3-4,它是顶点 0 到顶点 4 的最短路径。
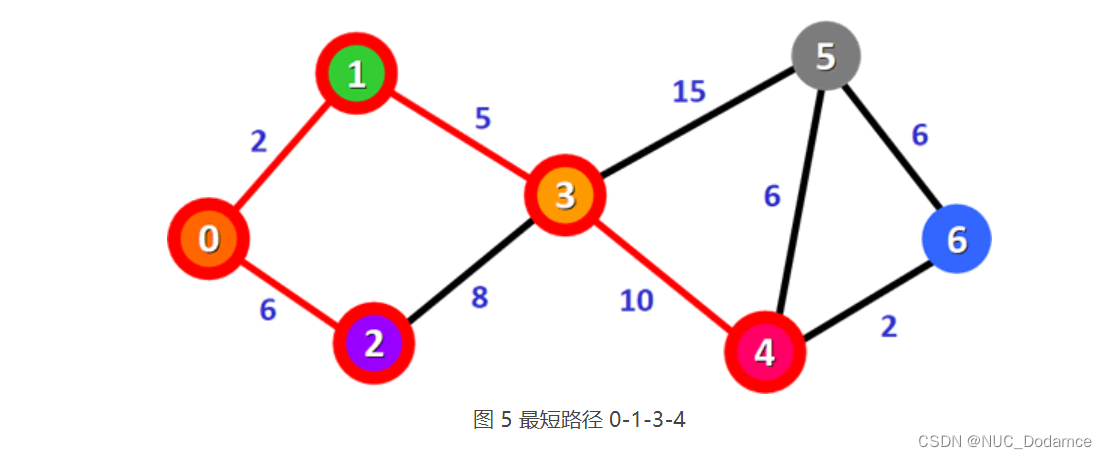
从顶点 4 出发,查找顶点 0 到其它顶点更短的路径并更新表 4。更新后的表格为:

- 表 5 中,总权值最小的路径是 0-1-3-4-6,它是顶点 0 到顶点 6 的最短路径。
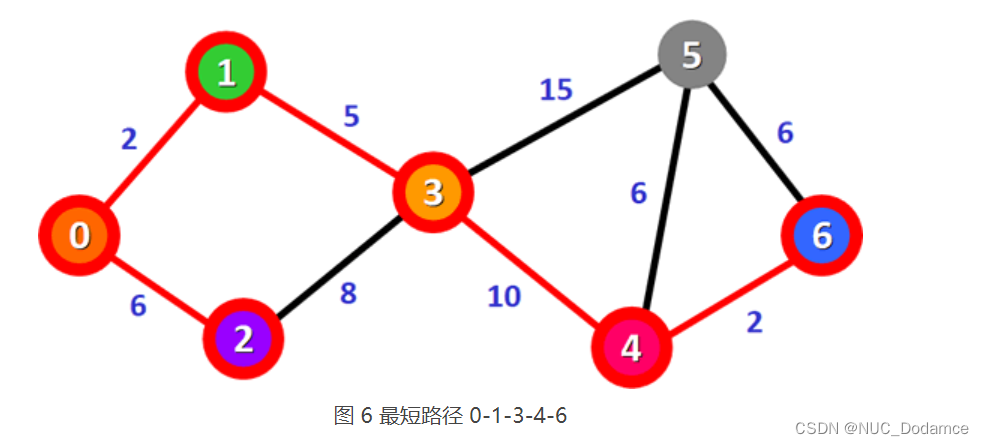
- 从图 6 可以看到,只剩下顶点 0 到顶点 5 的最短路径尚未确定。从顶点 6 出发到达顶点 5 的路径是 0-1-3-4-6-5,对应的总权值为 25,大于表 5 中记录的 0-1-3-5 路径,因此 0-1-3-5 是顶点 0 到顶点 5 的最短路径。
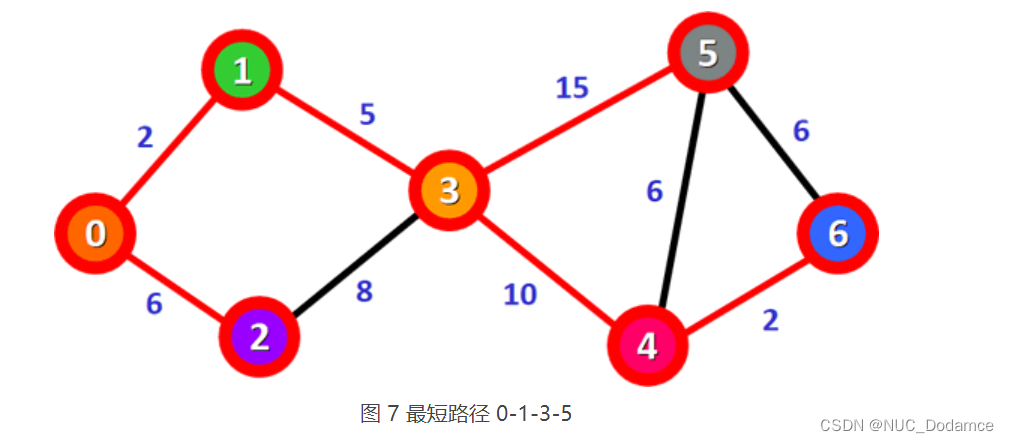
最终,通过Dijkstra算法计算出0到图其他节点的最短路径为:

C++代码
这里使用邻接矩阵保存边关系
顶点保存在dist数组中,数组下标代表顶点编号,数组下标值代表源顶点到这个顶点的最短路径长度。初始化默认值(无穷)
为了保存最短路径之间的节点,这里使用数组pPath的形式保存每一个顶点的父节点。(存储的是路径中所有顶点最短路径的前一个顶点下标)数组初始化为-1。
类似并查集找根节点的过程
Dijkstra算法
// 邻接矩阵法存储图结构
#include <iostream>
#include <assert.h>
#include <map>
#include <vector>
#include <queue>
#include <algorithm>
// v:图顶点保存的值。w:边的权值 max:最大权值,代表无穷。flag=true代表有向图。否则就是无向图
template <class v, class w, w max = INT_MAX, bool flag = false>
class graph
{
private:
std::vector<v> _verPoint; // 顶点集合
std::map<v, int> _indexMap; // 顶点与下标的映射
std::vector<std::vector<w>> _matrix; // 邻接矩阵
int _getPosPoint(const v &point)
{
if (_indexMap.find(point) != _indexMap.end())
{
return _indexMap[point];
}
else
{
std::cout << point << " not found" << std::endl;
return -1;
}
}
public:
graph() = default;
// 根据数组来开辟邻接矩阵
graph(const std::vector<v> &src)
{
_verPoint.resize(src.size());
for (int i = 0; i < src.size(); i++)
{
_verPoint[i] = src[i];
_indexMap[src[i]] = i;
}
// 初始化邻接矩阵
_matrix.resize(src.size());
for (int i = 0; i < src.size(); i++)
{
_matrix[i].resize(src.size(), max);
}
}
// 添加边的关系,输入两个点,以及这两个点连线边的权值。
void AddEdge(const v &pointA, const v &pointB, const w &weight)
{
// 获取这个顶点在邻接矩阵中的下标
int posA = _getPosPoint(pointA);
int posB = _getPosPoint(pointB);
_matrix[posA][posB] = weight;
if (!flag)
{
// 无向图,邻接矩阵对称
_matrix[posB][posA] = weight;
}
}
// 打印邻接矩阵
void PrintGraph()
{
// 打印顶点对应的坐标
typename std::map<v, int>::iterator pos = _indexMap.begin();
while (pos != _indexMap.end())
{
std::cout << pos->first << ":" << pos->second << std::endl;
pos++;
}
std::cout << std::endl;
// 打印边
printf(" ");
for (int i = 0; i < _verPoint.size(); i++)
{
std::cout << _verPoint[i] << " ";
}
printf("\n");
for (int i = 0; i < _matrix.size(); i++)
{
std::cout << _verPoint[i] << " ";
for (int j = 0; j < _matrix[i].size(); j++)
{
if (_matrix[i][j] == max)
{
// 这条边不通
printf("∞ ");
}
else
{
std::cout << _matrix[i][j] << " ";
}
}
printf("\n");
}
printf("\n");
}
//-------------------------------Dijkstra---------------------------
/**
* @brief 单源最短路径
*
* @param src 起点
* @param dist dist保存src到各个顶点的最短距离
* @param pPath pPath:保存最短路径的节点对应下标
*/
void Dijkstra(const v &src, std::vector<w> &dist, std::vector<int> &pPath)
{
size_t pos = _getPosPoint(src);
size_t size = _verPoint.size();
pPath.resize(size, -1);
dist.resize(size, max);
dist[pos] = 0; // 源顶点到自己本身最短距离为0
pPath[pos] = pos; // 源顶点的最短路径的父节点是自己本身
std::vector<bool> S(size, false); // 已经确定最短路径的顶点的集合
for (size_t time = 0; time < size; time++)
{
// 选不在S集合 最短路径的顶点,更新其他路径
int p = 0;
w min = max;
for (size_t i = 0; i < size; i++)
{
if (S[i] == false && dist[i] < min)
{
p = i;
min = dist[i];
}
}
// 把p放到S集合中
S[p] = true;
// src->p + p->p邻接节点 与 src ->p邻接节点权值相比较小,要更新
for (size_t adP = 0; adP < size; adP++)
{
// 找到p点邻接顶点
if (S[adP] == false && _matrix[p][adP] != max)
{
if ((dist[p] + _matrix[p][adP]) < dist[adP])
{
dist[adP] = dist[p] + _matrix[p][adP];
// 更新最短路径父节点
pPath[adP] = p;
}
}
}
}
}
/**
* @brief 单源最短路径
*
* @param src 起点
* @param dist dist保存src到各个顶点的最短距离
*/
void Dijkstra(const v &src, std::vector<w> &dist)
{
std::vector<int> pPath;
Dijkstra(src, dist, pPath);
size_t pos = _getPosPoint(src);
size_t size = _verPoint.size();
for (size_t i = 0; i < size; i++)
{
if (i != pos)
{
std::vector<int> path;
size_t dst_pos = i;
std::cout << "最短路径为:";
while (dst_pos != pos)
{
path.push_back(dst_pos);
dst_pos = pPath[dst_pos];
}
path.push_back(pos);
std::reverse(path.begin(), path.end());
for (size_t j = 0; j < path.size(); j++)
{
std::cout << _verPoint[path[j]];
if (j != path.size() - 1)
{
std::cout << "->";
}
}
std::cout << "长度: " << dist[i] << std::endl;
}
}
}
};
#include "Dijkstra.h"
using namespace std;
int main(int argc, char const *argv[])
{
graph<char, int> g({'0', '1', '2', '3', '4', '5', '6'});
g.AddEdge('0', '1', 2);
g.AddEdge('0', '2', 6);
g.AddEdge('1', '3', 5);
g.AddEdge('2', '3', 8);
g.AddEdge('3', '5', 15);
g.AddEdge('3', '4', 10);
g.AddEdge('4', '5', 6);
g.AddEdge('4', '6', 2);
g.AddEdge('6', '5', 6);
g.PrintGraph();
vector<int> dist;
g.Dijkstra('0', dist);
return 0;
}
算法的时间复杂度为O(N2),空间复杂度O(N)(N为顶点个数)
此外Dijkstra算法不适用于带负值的权值,使用于带负权的有向图最短路径算法为Bellman-Ford算法
3. 多源最短路径
多源最短路径:源顶点是图中的所有顶点,求图中任意两点的最短路径。
Ⅰ Floyd-Warshall算法
注意:
- Floyd-Warshall可以解决负数权值问题。
- 如果以所有点为源点,使用Dijkstra算法也可以算出图中任意两点的最短路径。但是Dijkstra算法不能带负数权值,Bellman-Ford算法效率太低。
Floyd-Warshall算法:
因为Floyd-Warshall算法要以图中任意顶点为源顶点。
根据上面分析可知,dist(记录源顶点到其他顶点的最短路径)数组应该是二维数组。
pPath(通过双亲表示法记录最短路径的节点)也应该是二维数组。
算法的思路是通过动态规划得出的。
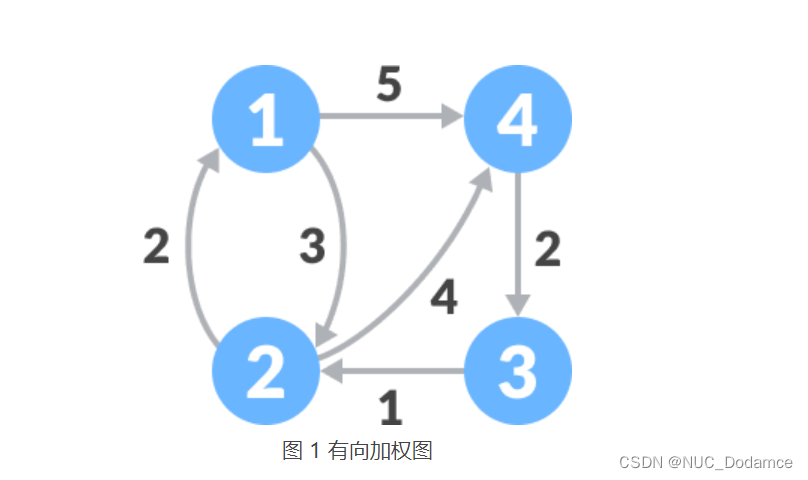
eg:
-
建立一张表格,记录每个顶点直达其它所有顶点的权值:

-
在表 1 的基础上,将顶点 1 作为 “中间顶点”,计算从各个顶点出发途径顶点 1 再到达其它顶点的权值,如果比表 1 中记录的权值更小,证明两个顶点之间存在更短的路径,对表 1 进行更新。
从各个顶点出发,途径顶点 1 再到达其它顶点的路径以及对应的权值分别是:
2-1-3:权值为 2 + ∞ = ∞,表 1 中记录的 2-3 的权值也是 ∞;
2-1-4:权值为 2 + 5 = 7,表 1 中记录的 2-4 的权值是 4;
3-1-2:权值为 ∞ + 3,表 1 中记录的 3-2 的权值是 1;
3-1-4:权值为 ∞ + 5,表 1 中记录的 3-4 的权值是 ∞;
4-1-2:权值为 ∞ + 3,表 1 中记录的 4-2 的权值是 ∞;
4-1-3:权值为 ∞ + ∞,表 1 中记录的 4-3 的权值是 2。以上所有的路径中,没有比表 1 中记录的权值最小的路径,所以不需要对表 1 进行更新。
-
在表 1 的基础上,以顶点 2 作为 “中间顶点”,计算从各个顶点出发途径顶点 2 再到达其它顶点的权值:
1-2-3:权值为 3 + ∞,表 1 中记录的 1-3 的权值为 ∞;
1-2-4:权值为 3 + 4 = 7,表 1 中 1-4 的权值为 5;
3-2-1:权值为 1 + 2 = 3,表 1 中 3-1 的权值为 ∞,3 < ∞;
3-2-4:权值为 1 + 4 = 5,表 1 中 3-4 的权值为 ∞,5 < ∞;
4-2-1:权值为 ∞ + 2,表 1 中 4-1 的权值为 ∞;
4-2-3:权值为 ∞ + ∞,表 1 中 4-3 的权值为 2。以顶点 2 作为 “中间顶点”,我们找到了比 3-1、3-4 更短的路径,对表 1 进行更新:

-
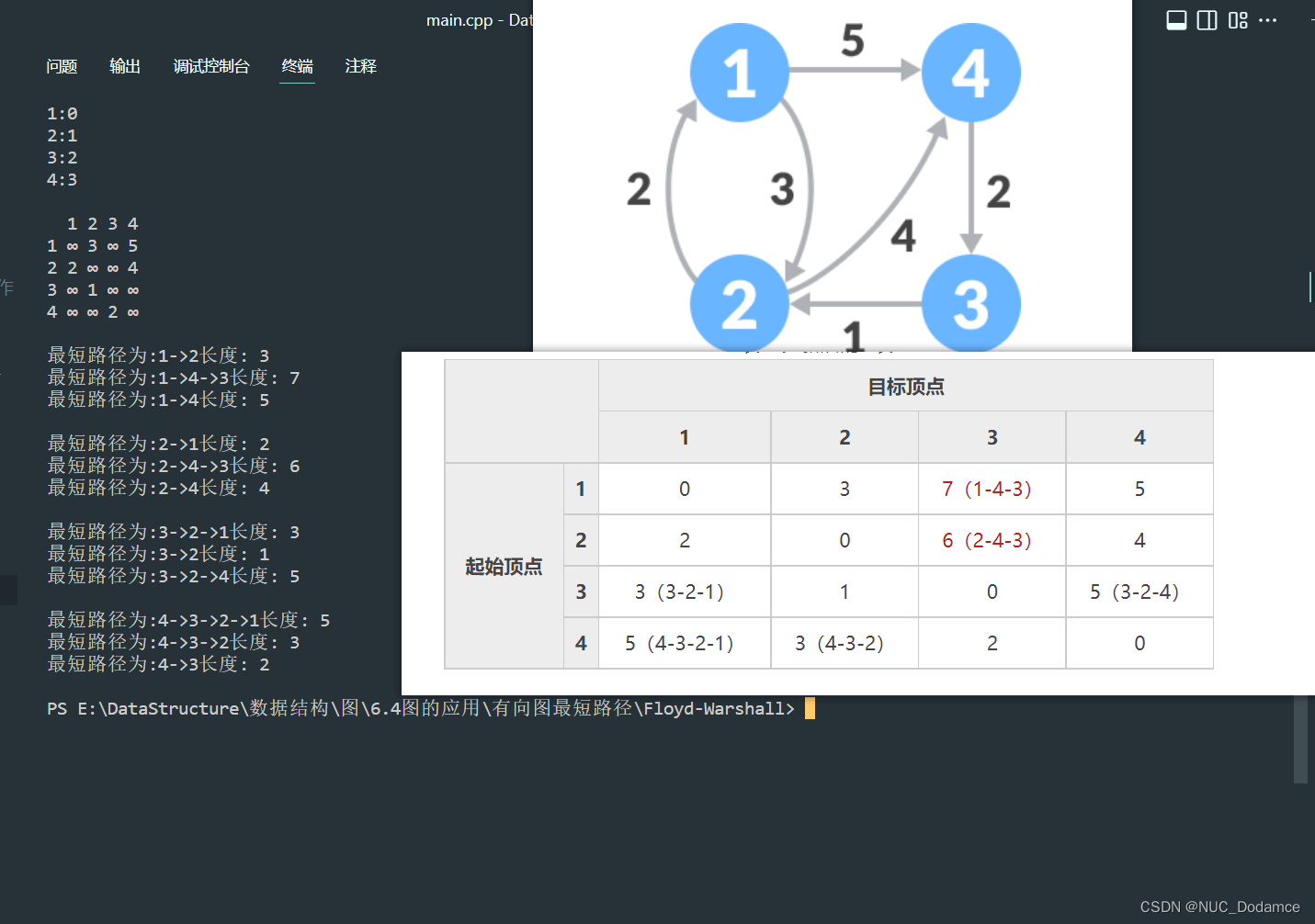
以此类推,分别以不同顶点为中间顶点,不断更新表,最终更新结果为

C++代码
时间复杂度:O(N3),空间复杂度O(N)
// 邻接矩阵法存储图结构
#include <iostream>
#include <assert.h>
#include <map>
#include <vector>
#include <queue>
#include <algorithm>
// v:图顶点保存的值。w:边的权值 max:最大权值,代表无穷。flag=true代表有向图。否则就是无向图
template <class v, class w, w max = INT_MAX, bool flag = false>
class graph
{
private:
std::vector<v> _verPoint; // 顶点集合
std::map<v, int> _indexMap; // 顶点与下标的映射
std::vector<std::vector<w>> _matrix; // 邻接矩阵
int _getPosPoint(const v &point)
{
if (_indexMap.find(point) != _indexMap.end())
{
return _indexMap[point];
}
else
{
std::cout << point << " not found" << std::endl;
return -1;
}
}
public:
graph() = default;
// 根据数组来开辟邻接矩阵
graph(const std::vector<v> &src)
{
_verPoint.resize(src.size());
for (int i = 0; i < src.size(); i++)
{
_verPoint[i] = src[i];
_indexMap[src[i]] = i;
}
// 初始化邻接矩阵
_matrix.resize(src.size());
for (int i = 0; i < src.size(); i++)
{
_matrix[i].resize(src.size(), max);
}
}
// 添加边的关系,输入两个点,以及这两个点连线边的权值。
void AddEdge(const v &pointA, const v &pointB, const w &weight)
{
// 获取这个顶点在邻接矩阵中的下标
int posA = _getPosPoint(pointA);
int posB = _getPosPoint(pointB);
_matrix[posA][posB] = weight;
if (!flag)
{
// 无向图,邻接矩阵对称
_matrix[posB][posA] = weight;
}
}
// 打印邻接矩阵
void PrintGraph()
{
// 打印顶点对应的坐标
typename std::map<v, int>::iterator pos = _indexMap.begin();
while (pos != _indexMap.end())
{
std::cout << pos->first << ":" << pos->second << std::endl;
pos++;
}
std::cout << std::endl;
// 打印边
printf(" ");
for (int i = 0; i < _verPoint.size(); i++)
{
std::cout << _verPoint[i] << " ";
}
printf("\n");
for (int i = 0; i < _matrix.size(); i++)
{
std::cout << _verPoint[i] << " ";
for (int j = 0; j < _matrix[i].size(); j++)
{
if (_matrix[i][j] == max)
{
// 这条边不通
printf("∞ ");
}
else
{
std::cout << _matrix[i][j] << " ";
}
}
printf("\n");
}
printf("\n");
}
//-------------------------------Floyd-Warshall---------------------------
/**
* @brief 多源最短路径
*
* @param vDist (记录源顶点到其他顶点的最短路径)数组应该是二维数组。
* @param vPath (通过双亲表示法记录最短路径的节点)也应该是二维数组。
*/
void FloydWarShall(std::vector<std::vector<w>> &vDist, std::vector<std::vector<int>> &vPath)
{
size_t size = _verPoint.size();
// 初始化顶点距离矩阵和路径矩阵
vDist.resize(size);
vPath.resize(size);
for (size_t i = 0; i < size; i++)
{
vDist[i].resize(size, max);
vPath[i].resize(size, -1);
}
// 直接相连的边更新初始化
for (size_t i = 0; i < size; i++)
{
for (size_t j = 0; j < size; j++)
{
if (_matrix[i][j] != max)
{
vDist[i][j] = _matrix[i][j];
vPath[i][j] = i; // i->j起点是i点
}
if (i == j)
{
vDist[i][j] = w();
}
}
}
// 最短路径的更新i->{其他顶点}->j
// k作为中间点,尝试更新i->j的路径
for (size_t k = 0; k < size; k++)
{
for (size_t i = 0; i < size; i++)
{
for (size_t j = 0; j < size; j++)
{
if (vDist[i][k] != max && vDist[k][j] != max)
{
if (vDist[i][k] + vDist[k][j] < vDist[i][j])
{
// 经过k点更短,更新长度
vDist[i][j] = vDist[i][k] + vDist[k][j];
// 修改父亲节点
// 找上一个与j邻接的节点
// k->j 如果k与j直接相连,则vPath[i][j]=k
// 但是k->j不一定直接相连 k->...->x->j则vPath[i][j]=x,就是vPath[k][j]
vPath[i][j] = vPath[k][j];
}
}
}
}
}
}
void _PrintShortLine(const v &src, std::vector<w> &dist, std::vector<int> pPath)
{
size_t pos = _getPosPoint(src);
size_t size = _verPoint.size();
for (size_t i = 0; i < size; i++)
{
if (i != pos)
{
std::vector<int> path;
size_t dst_pos = i;
std::cout << "最短路径为:";
while (dst_pos != pos)
{
path.push_back(dst_pos);
dst_pos = pPath[dst_pos];
}
path.push_back(pos);
std::reverse(path.begin(), path.end());
for (size_t j = 0; j < path.size(); j++)
{
std::cout << _verPoint[path[j]];
if (j != path.size() - 1)
{
std::cout << "->";
}
}
std::cout << "长度: " << dist[i] << std::endl;
}
}
}
void PrintFloyd(std::vector<std::vector<w>> &vDist, std::vector<std::vector<int>> &vPath)
{
FloydWarShall(vDist, vPath);
for (int i = 0; i < _verPoint.size(); i++)
{
_PrintShortLine(_verPoint[i], vDist[i], vPath[i]);
std::cout << "\n";
}
}
};
#include "Floyd-Warshall.h"
using namespace std;
int main(int argc, char const *argv[])
{
graph<char, int, INT_MAX, true> g({'1', '2', '3', '4'});
g.AddEdge('1', '2', 3);
g.AddEdge('1', '4', 5);
g.AddEdge('2', '1', 2);
g.AddEdge('4', '3', 2);
g.AddEdge('2', '4', 4);
g.AddEdge('3', '2', 1);
g.PrintGraph();
vector<vector<int>> vDist;
vector<vector<int>> vPath;
g.FloydWarShall(vDist, vPath);
g.PrintFloyd(vDist, vPath);
return 0;
}


![[学习笔记]2021韩顺平一周学会Linux](https://img-blog.csdnimg.cn/2aa3b10176cf41cda5d5b460da40be9d.png)







![【WSL】[04]从C盘解放出来WSL的linux镜像](https://img-blog.csdnimg.cn/6475bf1b269f43a5a465f8157819a1f9.png)