基于stm32c8t6开发板
一,蓝牙模块HC-05
1.外观

2.接线方式
TX----->PB10 RX----->PB11 VCC----->3.3V GND---->GND
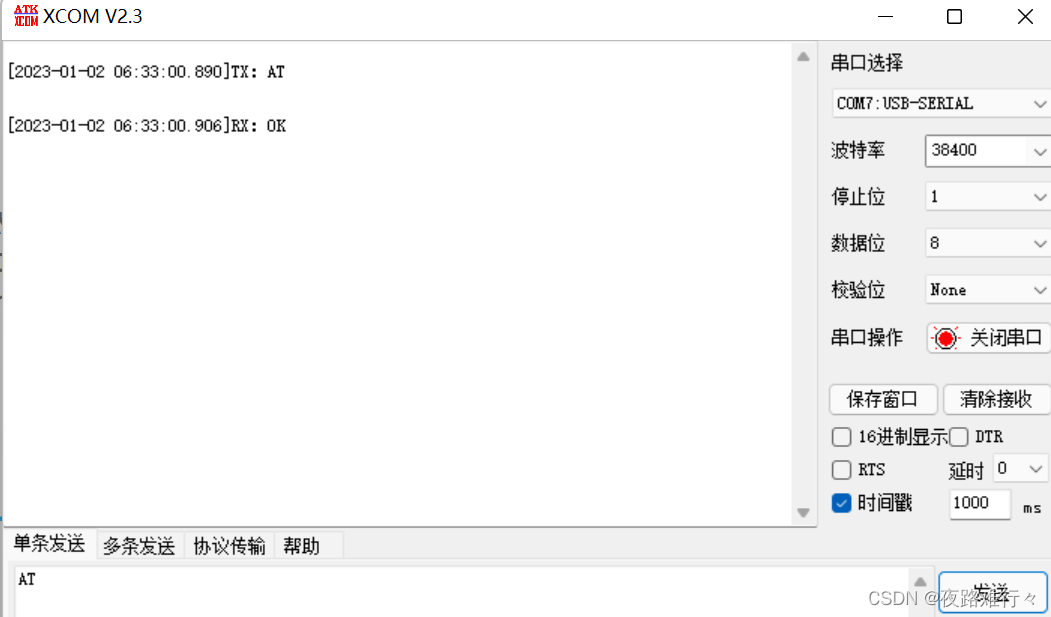
3.AT模式
不用烧录代码,直接将c8t6和HC-05相连接,通过XCOM或者SSCOM软件便可以进入调试模式,
进入AT模式的方法:长按HC-05上面的黑按钮,同时上电,此时指示灯会处于一个慢闪的状态,此时便进入了AT模式。
紧接着可以在串口软件上输入AT相应指令进行蓝牙模块的初始化。
4.运行逻辑
我们通过手机上面的蓝牙软件将信息发送到蓝牙的初始化串口上,然后单片机会读取串口上面的信息,紧接着别的串口就可以通过读取单片机的信息,从而将蓝牙串口的信息,发送到别的串口。本文代码便是蓝牙使用的是串口3,然后会读取出来,然后显示在串口1中,同时将信息显示在OLED上面。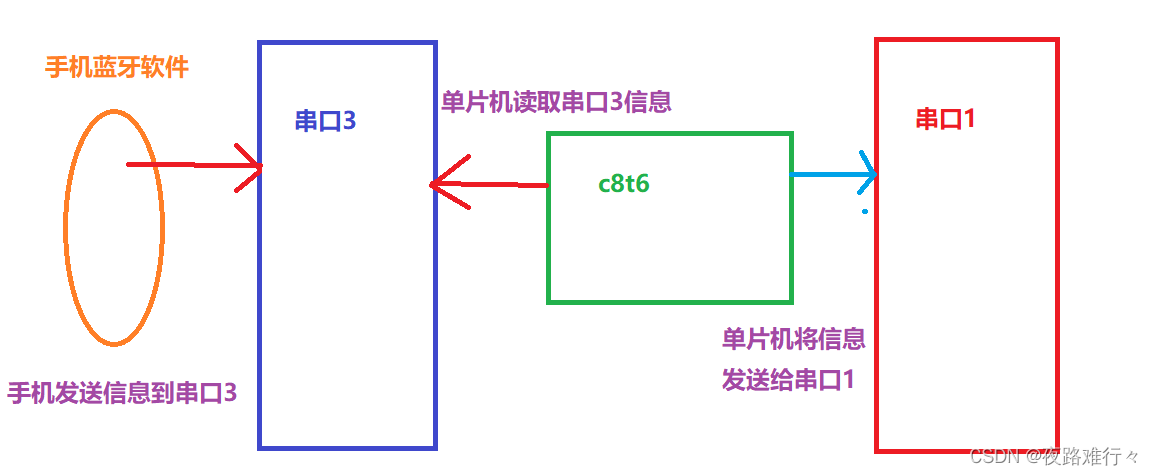
5.代码理解
串口1的初始化,以及串口中断的处理【正点原子例程】
u8 USART_RX_BUF[USART_REC_LEN]; //能够接收的最大字节数
u16 USART_RX_STA=0; //当前接收状态的标记
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE);
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure);//³õʼ»¯GPIOA.9
//USART1_RX GPIOA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure);//³õʼ»¯GPIOA.10
//Usart1 NVIC 中断配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;//ÇÀÕ¼ÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //×ÓÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜ
NVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷
//USART 初始化配置
USART_InitStructure.USART_BaudRate = bound;//波特率的设置,一般设置为9600
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断
USART_Cmd(USART1, ENABLE); //使能串口
}
void USART1_IRQHandler(void) //中断处理
{
u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(数据必须为OXod,OXoa结尾)
{
Res =USART_ReceiveData(USART1); //接收一个字节赋值给变量res
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//未接收到0Xoa
else USART_RX_STA|=0x8000; //接收完成
}
else //还未收到OXOD
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//长度溢出,数据出错
}
}
}
} 串口3的初始化及中断
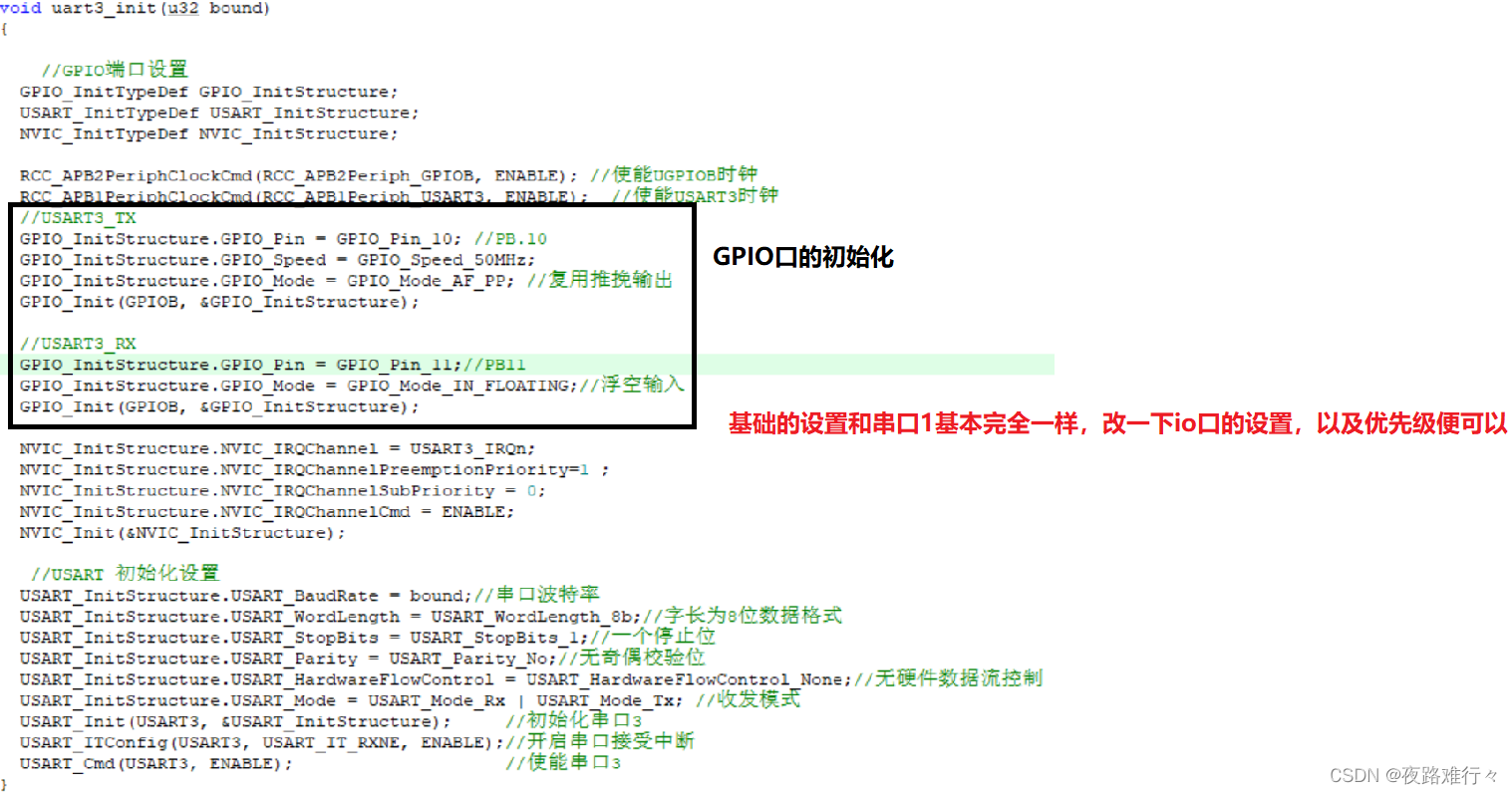
void uart3_init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
//USART3_TX
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB.10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//USART3_RX
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;//PB11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//USART
USART_InitStructure.USART_BaudRate = bound;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART3, &USART_InitStructure);
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
USART_Cmd(USART3, ENABLE);
}
u16 USART3_RX_STA=0;
u8 USART3_RX_BUF[USART3_REC_LEN];
void USART3_IRQHandler(void)
{
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)
{
recieve_bluetooth_DATA=USART_ReceiveData(USART3);
if((USART3_RX_STA&0x8000)==0)
{
if(USART3_RX_STA&0x4000)
{
if(recieve_bluetooth_DATA!=0x0a)
USART3_RX_STA=0;
else
{
USART3_RX_STA|=0x8000;
}
}
else
{
if(recieve_bluetooth_DATA==0x0d)USART3_RX_STA|=0x4000;
else
{
USART3_RX_BUF[USART3_RX_STA&0X3FFF]=recieve_bluetooth_DATA ;
USART3_RX_STA++;
if(USART3_RX_STA>(USART3_REC_LEN-1))
USART3_RX_STA=0;
}
}
}
}
} 主函数代码:
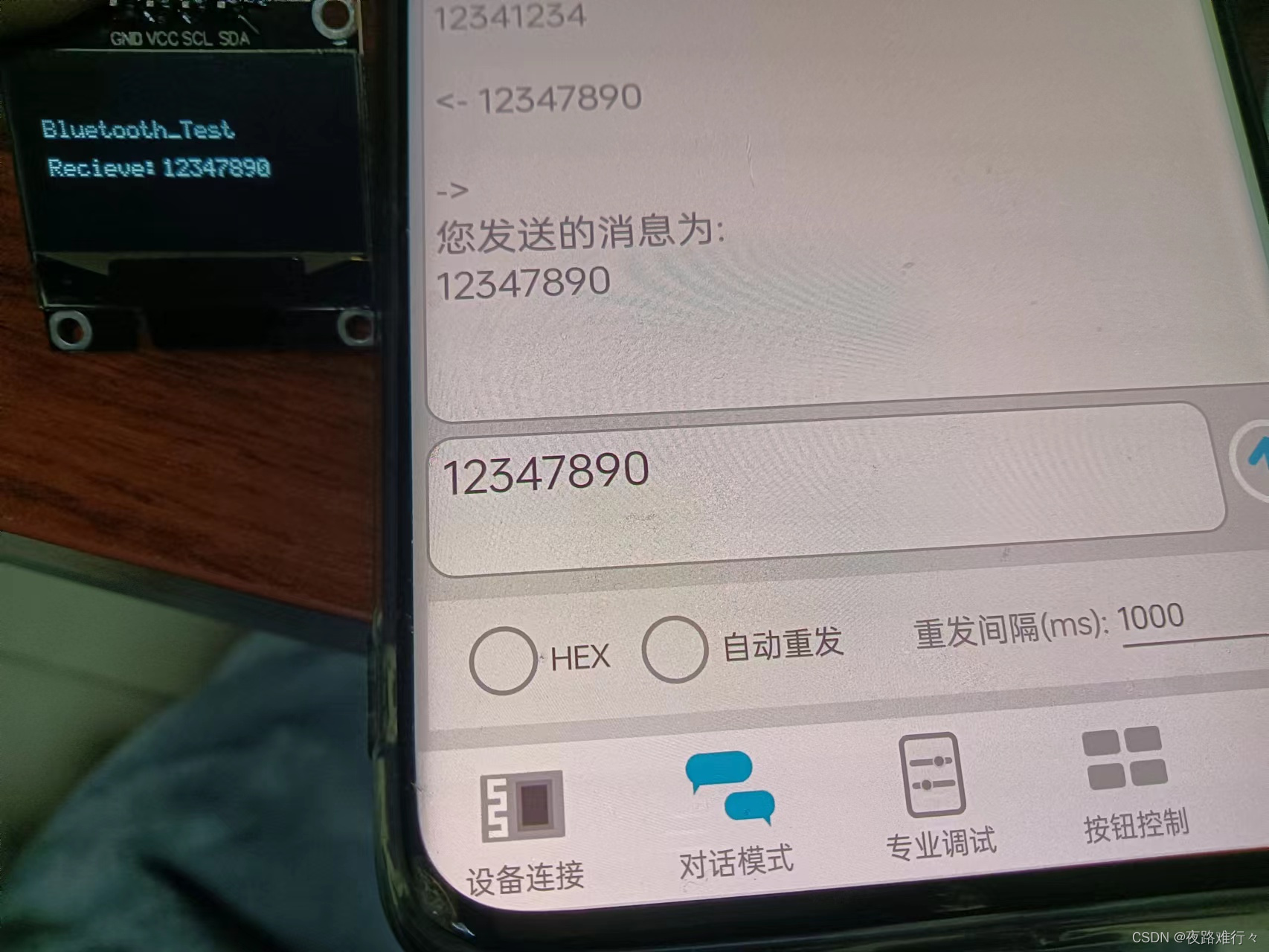
蓝牙软件的使用

蓝牙软件的配置

一定要先把软件配置做好,小心出现乱码!!!!
OLED显示
逻辑很简单,就是将串口3的信息显示在OELD上面,只需要读取,然后存入一个变量数组里面就可以。
代码分析:
int main(void)
{
u8 t;
u8 len;
delay_init(); //=====延时函数初始化
NVIC_Configuration(); //=====中断优先级分组
uart1_init(9600); //=====串口1初始化
uart3_init(115200); //=====串口3初始化即蓝牙初始化
delay_ms(100);
LED_Init(); //=====初始化与 LED 连接的IO
KEY_Init(); //=====按键初始化
OLED_Init(); //=====OLED初始化
OLED_Clear(); //=====OLED清屏
while(1)
{
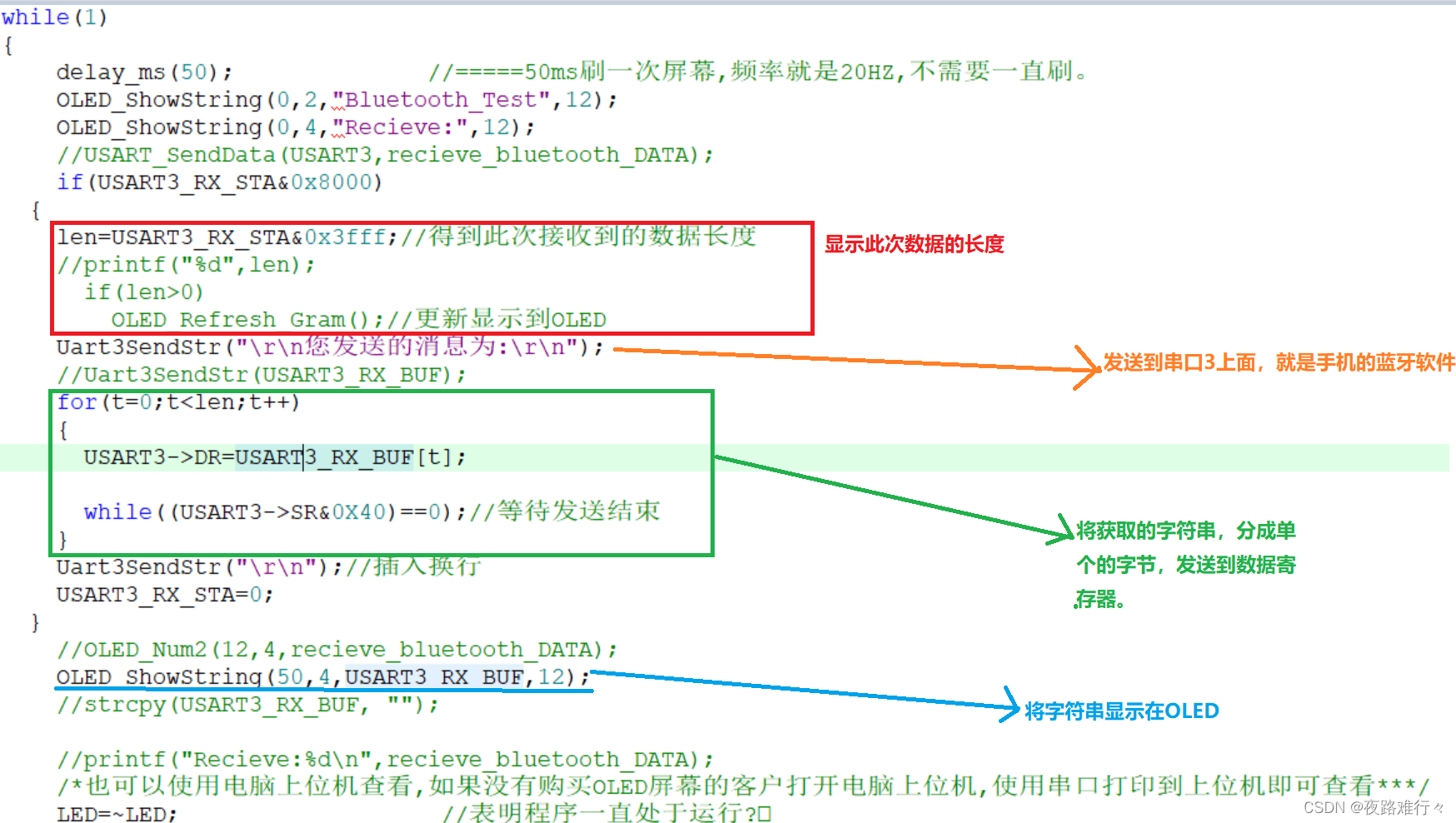
delay_ms(50); //=====50ms刷一次屏幕,频率就是20HZ,不需要一直刷。
OLED_ShowString(0,2,"Bluetooth_Test",12);
OLED_ShowString(0,4,"Recieve:",12);
//USART_SendData(USART3,recieve_bluetooth_DATA);
if(USART3_RX_STA&0x8000)
{
len=USART3_RX_STA&0x3fff;//得到此次接收到的数据长度
Uart3SendStr("\r\n您发送的消息为:\r\n");
for(t=0;t<len;t++)
{
USART3->DR=USART3_RX_BUF[t];
while((USART3->SR&0X40)==0);//等待发送结束
}
Uart3SendStr("\r\n");//插入换行
USART3_RX_STA=0;
}
OLED_ShowString(50,4,USART3_RX_BUF,12);
LED=~LED; //表明程序一直处于运行?
}
}
遇到的问题【BUG】
1)每次串口3只可以打印两个字节
原来是:
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; 改为:
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; 解决方法:(i)提升串口的接收的优先级,让其先执行;(ii)删除中断函数的printf语句,可能是超时导致的(iii)尽力不要在中断函数中进行接发操作,在中断函数中将数据存储起来便可以。
效果图: