轮廓与轮廓特征
- 前言
- 1.获取轮廓
- 通过膨胀与腐蚀获得轮廓
- 通过梯度获取轮廓
- 通过边缘检测获取轮廓
- 2.寻找轮廓
- 参数及作用对比
- 3.轮廓特征
前言
在前面的文章中我们已经学会了使用膨胀与腐蚀、使用梯度、使用边缘检测的方式获得图像的轮廓,那么在获得轮廓后我们可以对图像进行什么样的操作呢?本文将介绍轮廓的绘制与轮廓特征的使用
1.获取轮廓
假设我们现在有这样一张名为feng.jpg的图片

同样为了表述方便,我们要先定义一个图像显示函数
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
通过膨胀与腐蚀获得轮廓
在之前的博客:opencv-python常用函数解析及参数介绍(五)——腐蚀与膨胀中我们学到了三种获取轮廓的方式,大家可以查阅之前的博客获取细节,在本文中我们将使用膨胀减去腐蚀获取轮廓
img = cv2.imread('feng.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 230, 255, cv2.THRESH_BINARY)
kernel = np.ones((5,5),np.uint8)
dilate = cv2.dilate(thresh, kernel, 1)
erosion = cv2.erode(thresh, kernel, 1)
contour_img = dilate-erosion # 获取轮廓
cv_show(contour_img, 'c')

通过梯度获取轮廓
本文使用效果最好的Sobel算子获取轮廓,其他的梯度计算方式请参考:opencv-python常用函数解析及参数介绍(六)——图像梯度
img = cv2.imread('feng.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 230, 255, cv2.THRESH_BINARY)
# 获取轮廓
contour_x = cv2.Sobel(thresh, cv2.CV_64F, 1, 0, ksize=3)
contour_x = cv2.convertScaleAbs(contour_x)
contour_y = cv2.Sobel(thresh, cv2.CV_64F, 0, 1, ksize=3)
contour_y = cv2.convertScaleAbs(contour_y)
contour_img = cv2.addWeighted(contour_x, 0.5, contour_y, 0.5, 0)
cv_show(contour_img, 'c')
通过边缘检测获取轮廓
边缘检测的细节请参照:opencv-python常用函数解析及参数介绍(七)——边缘检测
img = cv2.imread('feng.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 230, 255, cv2.THRESH_BINARY)
# 获取轮廓
contour_img = cv2.Canny(img, 200, 250)
cv_show(contour_img, 'c')
2.寻找轮廓
下面我们使用效果最好的边缘检测得到的结果寻找轮廓
我们留意到,这个符号由多个图形组成,我们可以使用cv2.findContours函数找到每一部分的轮廓
findContours的参数为(图像,mode, method)
其中mode为轮廓检索模式,参数和作用如下
| 参数 | 作用 |
|---|---|
| RETR_EXTERNAL | 只检索最外面的轮廓; |
| RETR_LIST | 检索所有的轮廓,并将其保存到一条链表当中; |
| RETR_CCOMP | 检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的边界; |
| RETR_TREE | 检索所有的轮廓,并重构嵌套轮廓的整个层次 |
其中method为轮廓逼近方法,参数和作用如下
| 参数 | 作用 |
|---|---|
| CHAIN_APPROX_NONE | 以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。 |
| CHAIN_APPROX_SIMPLE | 压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。 |
我们可以使用cv2.drawContours函数画出轮廓,其参数有(轮廓,轮廓索引,颜色模式,线条厚度)
轮廓索引是只第几个轮廓,当为-1时则画出所有轮廓,需要注意的是在绘制前需要先copy一份原图,否则原图也会被画上轮廓
参数及作用对比
这个过程只是为了方便展示效果,如果不理解不必强求
import math
for retr in ["cv2.RETR_EXTERNAL", "cv2.RETR_LIST", "cv2.RETR_CCOMP", "cv2.RETR_TREE"]:
print(retr)
contours, hierarchy = cv2.findContours(contour_img, eval(retr), cv2.CHAIN_APPROX_NONE)
r_list = img
row = int(math.sqrt(len(contours) + 2))
col = math.ceil((len(contours) + 2) / row)+1
plt.subplot(row,col, 1)
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.xticks([]), plt.yticks([])
plt.title('origin')
for i in range(len(contours)):
res = cv2.drawContours(img.copy(), contours, i, (0, 0, 255), 2)
plt.subplot(row, col, 2+i)
plt.imshow(cv2.cvtColor(res, cv2.COLOR_BGR2RGB))
plt.xticks([]), plt.yticks([])
plt.title(str(i+1))
plt.subplot(row, col, len(contours)+2)
plt.imshow(cv2.cvtColor(cv2.drawContours(img.copy(), contours, -1, (0, 0, 255), 2), cv2.COLOR_BGR2RGB))
plt.xticks([]), plt.yticks([])
plt.title('all')
plt.show()
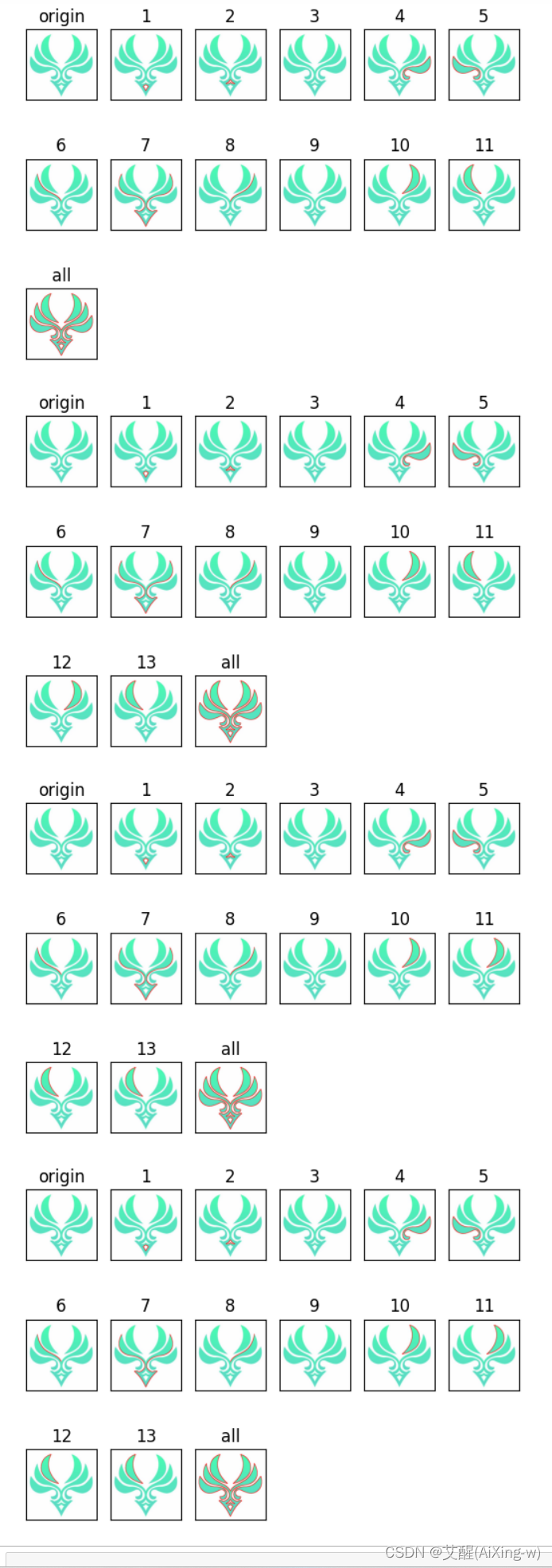
可以看到除了第一个之外其他的效果相似,其实确实是这样的,其他的只不过是层次不一样,而第一个只取了外轮廓,所以看起来要比其他的轮廓少。
第二个参数只不过是存储方式不同,从描述上来看,一个适用于曲线较多的情况,另外一个适用于直线较多的情况。
同时我们还看到,这些图里面似乎有一些没什么变化的图,这是因为图中有噪点,所以有的点被误判成了轮廓,要去掉这种情况的点我们只需要求一下轮廓特征就好了,比如规定轮廓面积小于某个值就不算做轮廓或者周长小于某个值就不算做轮廓。
3.轮廓特征
在opencv中我们通过cv2.contourArea求面积,通过cv2.contourLength求周长,如果contoursLength第二个参数为True则求的周长为闭区间
我们来求一下第一个区间的面积和周长
contours, hierarchy=cv2.findContours(contour_img,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
res = cv2.drawContours(img.copy(), contours, 0, (0, 0, 255), 2)
cv_show(res,'res')
print(cv2.contourArea(contours[0]))
print(cv2.arcLength(contours[0], True))

下面看一下所有的面积和周长
contours, hierarchy=cv2.findContours(contour_img,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
for i in range(len(contours)):
print(cv2.contourArea(contours[i]), cv2.arcLength(contours[i], True))
值为0的就是那些被误判成轮廓的点


![P1827 [USACO3.4] 美国血统 American Heritage](https://img-blog.csdnimg.cn/5a47c30d5c244b23a1906a9544e832e9.png)