相位调制(PM)是将信息编码为载波的瞬时相位变化的一种调制模式。
调相的基本表达式如下;
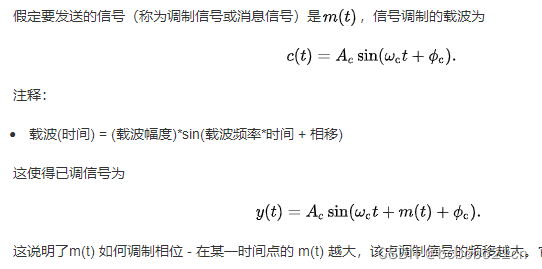
载波c(t)是一个标准正弦信号;m(t)是调制信号;调制以后是把m(t)的变化附加到了载波的相位变化上;
调相的基本示意如下;当信息为1时,还是一个正弦波,当信息为0时,载波相位被移动了180度;这是简单的示意;

用matlab做一下看;
先按前文生成一个4个周期的正弦波作为载波;
然后生成调制信号m;
因为前文的t有100个值,生成有100个值的m如下;

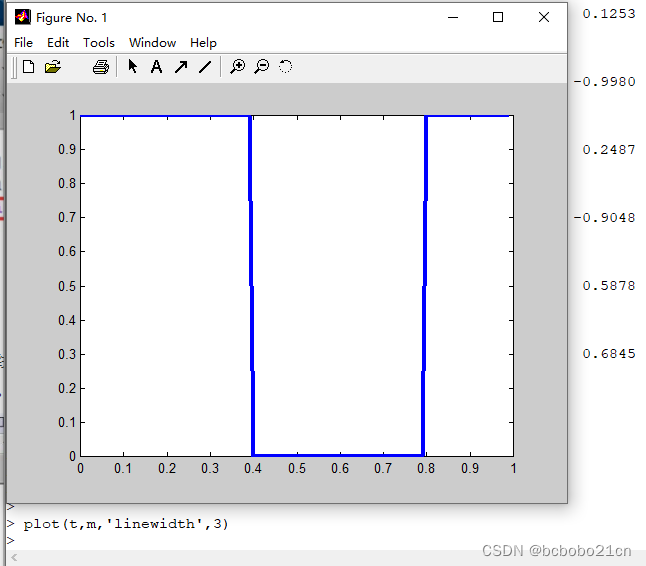
绘制一下m;
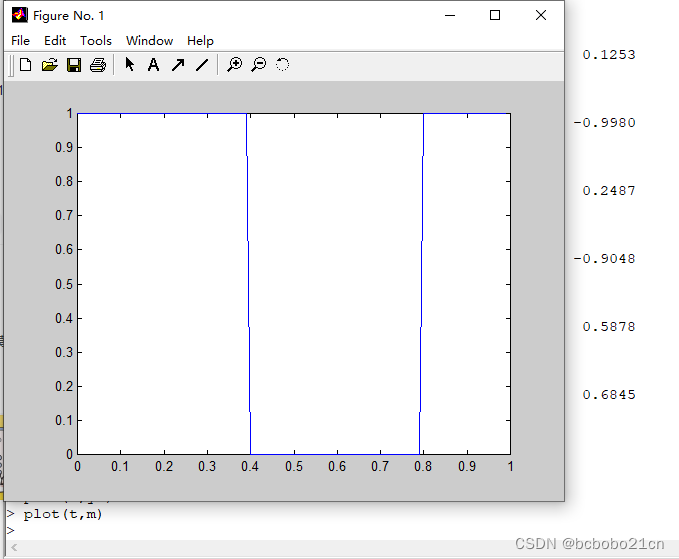
不清楚,加粗宽度绘一下;m在0-0.4为1,在0.4-0.8为0,0.8-1为1;
载波的表达式是sin(2*pi*f*t),把m加到相位上是 sin(2*pi*f*t+m);
做出来是这样;
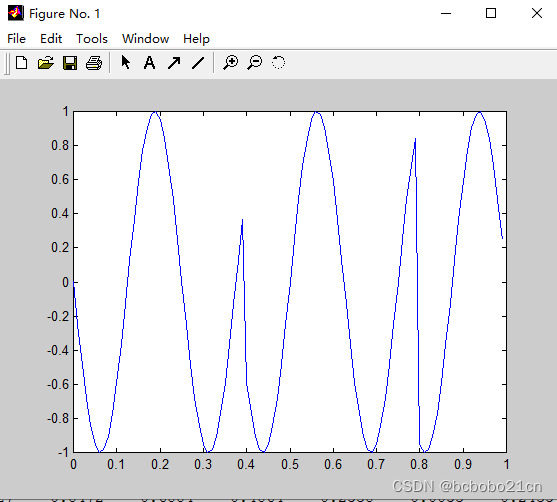
看上去不太对;
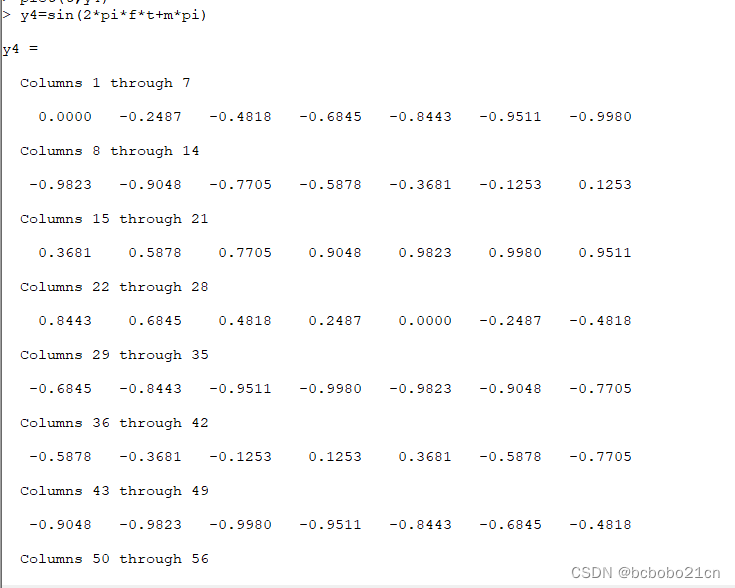
因为m是角度,前面t有乘2*pi,把m乘pi再加上去,
绘制一下图像;也不太对;
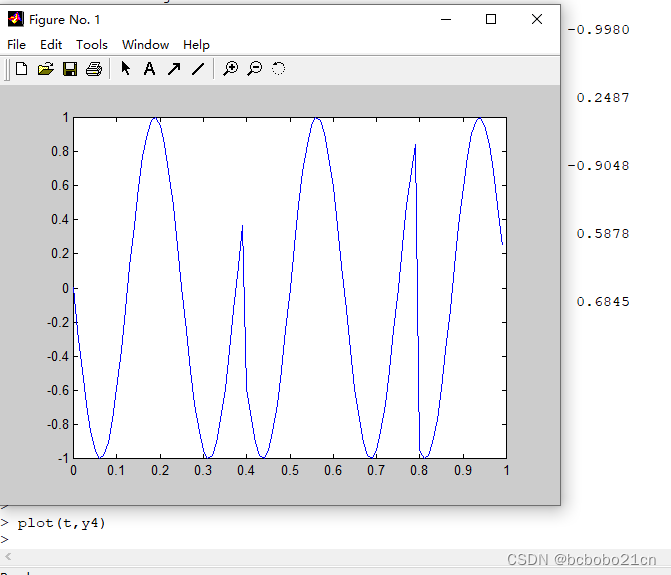
没有实现;有时间继续;
先找个图看一下三种基本调制方式的差别;




![[ Azure - Database ] Azure Database for MySQL 配置Auditing并查看使用](https://img-blog.csdnimg.cn/9e84f146faef43e8bc933508270ecc08.png)




![[机器学习-概念新] 什么是欧式距离、标准化欧式距离、马氏距离、余弦距离](https://img-blog.csdnimg.cn/20200703235519658.png)