Hi, 你好。我是茶桁。
上一节课中我们预告了,本节课是一个难点,同时也是一个重点,大家要理解清楚。
我们在做机器学习的时候,会用不同的优化方法。
SGD

上图中左边就是Batch Gradient Descent,中间是Mini-Batch Gradient Descent, 最右边则是Stochastic Gradient Descent。
我们还是直接上代码写一下来看。首先我们先定义两个随机值,一个x,一个ytrue:
import numpy as np
x = np.random.random(size=(100, 8))
ytrue = torch.from_numpy(np.random.uniform(0, 5, size=(100, 1)))
x是一个1008的随机值,ytrue是1001的随机值,在0到5之间,这100个x对应着这100个ytrue的输入。
然后我们来定义一个Sequential, 在里面按顺序放一个线性函数,一个Sigmoid激活函数,然后再来一个线性函数,别忘了咱们上节课所讲的,要注意x的维度大小。
linear = torch.nn.Linear(in_features=8, out_features=1)
sigmoid = torch.nn.Sigmoid()
linear2 = torch.nn.Linear(in_features=1, out_features=1)
train_x = torch.from_numpy(x)
model = torch.nn.Sequential(linear, sigmoid, linear2).double()
我们先来看一下训练x和ytrue值的大小:
print(model(train_x).shape)
print(ytrue.shape)
---
torch.Size([100, 1])
torch.Size([100, 1])
然后我们就可以来求loss了,先拿到预测值,然后将预测值和真实值一起放进去求值。
loss_fn = torch.nn.MSELoss()
yhat = model(train_x)
loss = loss_fn(yhat, ytrue)
print(loss)
---
36.4703
我们现在可以定义一个optimer, 来尝试进行优化,我们来将之前的所做的循环个100次,在其中我们加上反向传播:
optimer = torch.optim.SGD(model.parameters(), lr=1e-3)
for e in range(100):
yhat = model(train_x)
loss = loss_fn(yhat, ytrue)
loss.backward()
print(loss)
optimer.step()
---
tensor(194.9302, dtype=torch.float64, grad_fn=<MseLossBackward0>)
...
tensor(1.9384, dtype=torch.float64, grad_fn=<MseLossBackward0>)
可以看到,loss会一直降低。从194一直降低到了2左右。
在求解loss的时候,我们用到了所有的train_x,那这种方式就叫做Batch gradient Descent,批量梯度下降。
它会对整个数据集计算损失函数相对于模型参数的梯度。梯度是一个矢量,包含了每个参数相对与损失函数的变化率。
这个方法会使用计算得到的梯度来更新模型的参数。更新规则通常是按照一下方式进行:
w t + 1 = w t − η ▽ w t \begin{align*} w_{t+1} = w_t - \eta \triangledown w_t \end{align*} wt+1=wt−η▽wt
w t + 1 w_{t+1} wt+1是模型参数, η \eta η是学习率, ▽ w t \triangledown w_t ▽wt是损失函数相对于参数的梯度。
但是在实际的情况下这个方法可能会有一个问题,比如说,我们在随机x的时候参数不是100,而是10^8,维度还是8维。假如它的维度很大,那么会出现的情况就是把x给加载到模型里面运算的时候,消耗的内存就会非常非常大,所需要的运算空间就非常大。
这也就是这个方法的一个缺点,计算成本非常高,由于需要计算整个训练数据集的梯度,因此在大规模数据集上的计算成本较高。而且可能会卡在局部最小值,难以逃离。说实话,我上面演示的数据也是尝试了几次之后拿到一次满意的,也遇到了在底部震荡的情况。
在这里可以有一个很简单的方法,我们规定每次就取20个:
for e in range(100):
for b in range(100 // 20):
batch_index = np.random.choice(range(len(train_x)), size=20)
yhat = model(train_x[batch_index])
loss = loss_fn(yhat, ytrue[batch_index])
loss.backward()
print(loss)
optimer.step()
这样做loss也是可以下降的,那这种方法就叫做Mini Batch。
还有一种方法很极端,就是Stochhastic Gradient Descent,就是每次只取一个个数字:
for e in range(100):
for b in range(100 // 1):
...
这种方法很极端,但是可以每次都可以运行下去。那大家就知道,有这三种不同的优化方式。
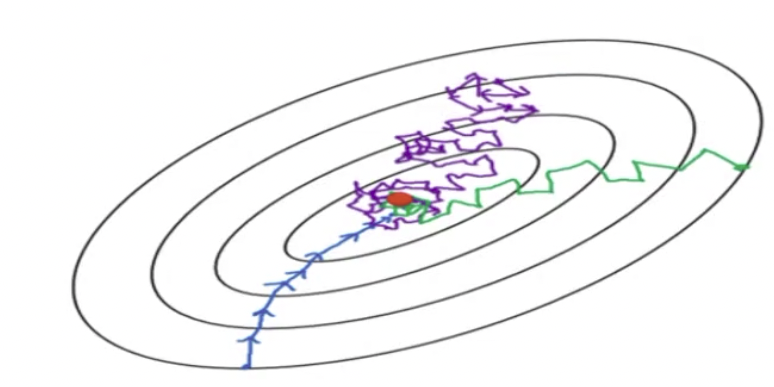
这样的话,我们来看一下,上图中的蓝色,绿色和紫色,分别对应哪种训练方式?
紫色的是Stochastic Gradient Descent,因为它每次只取一个点,所以它的loss变化会很大,随机性会很强。换句话说,这一次取得数据好,可能loss会下降,如果数据取得不好,它的这个抖动会很大。
绿色就是Mini-Batch, 我们刚才20个、20个的输入进去,是有的时候涨,有的时候下降。
最后蓝色的就是Batch Gradient Descent, 因为它x最多,所以下降的最稳定。
但是因为每次x特别多内存,那有可能就满了。内存如果满了,机器就没有时间去运行程序,就会变得特别的慢。
MOMENTUM
我们上面讲到的了这个式子:
w t + 1 = w t − η ▽ w t \begin{align*} w_{t+1} = w_t - \eta \triangledown w_t \end{align*} wt+1=wt−η▽wt
这个是最原始的Grady descent, 我们会发现一个问题,就是本来在等高线上进行梯度下降的时候,它找到的不是最快的下降的那条线,在实际情况中,数据量会很多,数量会很大。比方说做图片什么的,动辄几兆几十兆,如果要再加载几百个这个进去,那就会很慢。这个梯度往往可能会变的抖动会很大。
那有人就想了一个办法去减少抖动。就是我们每一次在计算梯度下降方向的时候,连带着上一次的方向一起考虑,然后取一个比例改变了原本的方向。那这样的话,整个梯度下降的线就会平缓了,抖动也就没有那么大,这个就叫做Momentum, 动量。
v t = γ ⋅ v t − 1 + η ▽ w t w t + 1 = w t − v t \begin{align*} v_t & = \gamma \cdot v_{t-1} + \eta \triangledown w_t \\ w_{t+1} & = w_t - v_t \end{align*} vtwt+1=γ⋅vt−1+η▽wt=wt−vt
动量在物理学中就是物体沿某个方向运动的能量。
之前我们每次的wt是直接去减去学习率乘以梯度,现在还考虑了v{t-1}的值,乘上一个gamma,这个值就是我们刚才说的取了一个比例。
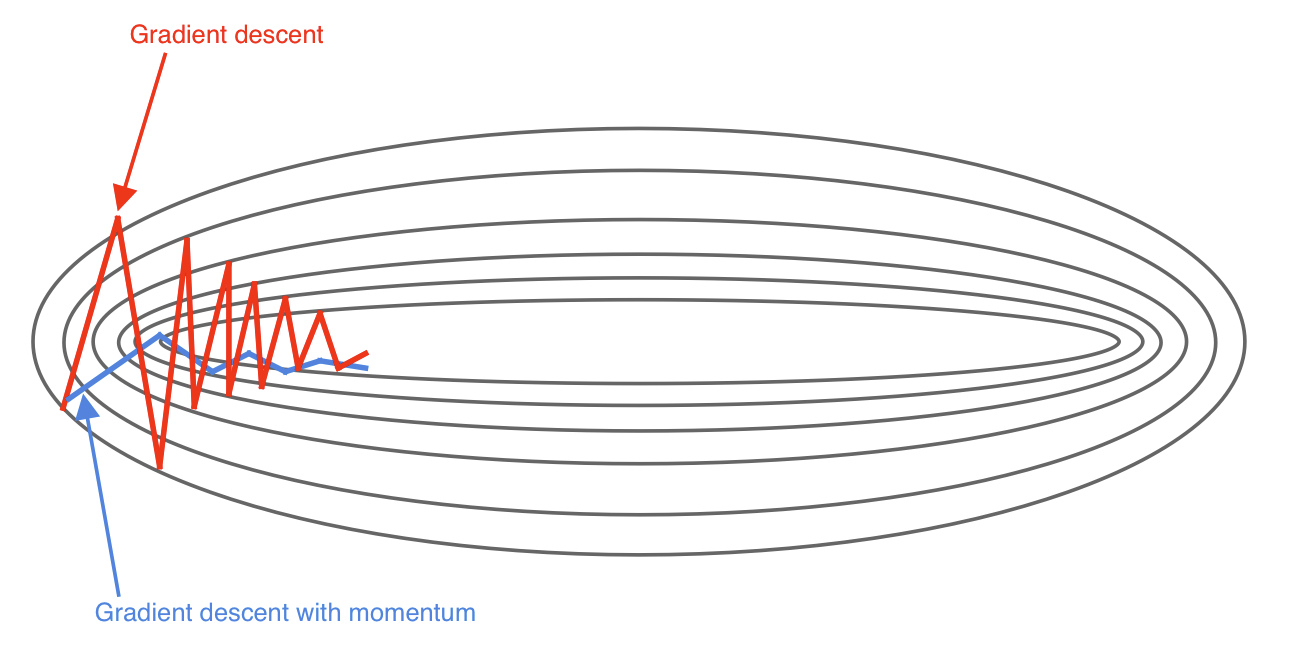
就像这个图一样,原来是红色,加了动量之后就变成蓝色,可以看到更平稳一些。
RMS-PROP
除了动量法之外呢,还有一个RMS-PROP方法,全称为Root mean square prop。
S ∂ l o s s ∂ w = β S ∂ l o s s ∂ w + ( 1 − β ) ∣ ∣ ∂ l o s s ∂ w ∣ ∣ 2 S ∂ l o s s ∂ b = β S ∂ l o s s ∂ b + ( 1 − β ) ∣ ∣ ∂ l o s s ∂ b ∣ ∣ 2 w = w − α ∂ l o s s ∂ w S ∂ l o s s ∂ w b = b − α ∂ l o s s ∂ b S ∂ l o s s ∂ b \begin{align*} S_{\frac{\partial loss}{\partial w}} & = \beta S_{\frac{\partial loss}{\partial w}} + (1 - \beta)||\frac{\partial loss}{\partial w} ||^2 \\ S_{\frac{\partial loss}{\partial b}} & = \beta S_{\frac{\partial loss}{\partial b}} + (1 - \beta)||\frac{\partial loss}{\partial b} ||^2 \\ w & = w - \alpha \frac{\frac{\partial loss}{\partial w}}{\sqrt{S_{\frac{\partial loss}{\partial w}}}} \\ b & = b - \alpha \frac{\frac{\partial loss}{\partial b}}{\sqrt{S_{\frac{\partial loss}{\partial b}}}} \end{align*} S∂w∂lossS∂b∂losswb=βS∂w∂loss+(1−β)∣∣∂w∂loss∣∣2=βS∂b∂loss+(1−β)∣∣∂b∂loss∣∣2=w−αS∂w∂loss∂w∂loss=b−αS∂b∂loss∂b∂loss
这个方法看似复杂,其实也是非常简单。这些方法在PyTorch里其实都有包含,我们可以直接调用。我们在这里还是要理解一下它的原理,之后做事的时候也并不需要真的取从头写这些玩意。
在讲它之前,我们再回头来说一下刚刚求解的动量法,动量法其实已经做的比较好了,但是还是有一个问题,它每次的rate是人工定义的。也就是我们上述公式中的 γ \gamma γ, 这个比例是人工定义的,那在RMS-PROP中就写了一个动态的调整方法。
这个动态的调整方法就是我们每一次在进行调整w或者b的时候,都会除以一个根号下的 S ∂ l o s s ∂ w S_{\frac{\partial loss}{\partial w}} S∂w∂loss,我们往上看,如果 ∂ l o s s ∂ w \frac{\partial loss}{\partial w} ∂w∂loss比较大的话,那么 S ∂ l o s s ∂ w S_{\frac{\partial loss}{\partial w}} S∂w∂loss也就将会比较大,那放在下面的式子中,根号下,也就是 S ∂ l o s s ∂ w \sqrt{S_{\frac{\partial loss}{\partial w}}} S∂w∂loss在分母上,那么w就会更小,反之则会更大。
所以说,当这一次的梯度很大的时候,这样一个方法就让 ∂ l o s s ∂ w \frac{\partial loss}{\partial w} ∂w∂loss其实变小了,对b来说也是一样的情况。
也就说,如果上一次的方向变化的很严重,那么这一次就会稍微的收敛一点,就会动态的有个缩放。那么如果上一次变化的很小,那为了加速它,这个值反而就会变大一些。
所以说他是实现了一个动态的学习率的变化,当然它前面还有一个初始值,这个 γ \gamma γ需要人为设置,但是在这个 γ \gamma γ基础上它实现了动态的学习速率的变化。
动态的学习速率考察两个值,一个是前一时刻的变化的快慢,另一个就是它此时此刻变化的快慢。这个就叫做RMS。
ADAM
那我们在这里,其实还有一个方法:ADAM。
V
d
w
=
β
1
V
d
w
+
(
1
−
β
1
)
d
w
V
d
b
=
β
1
V
d
b
+
(
1
−
β
1
)
d
b
S
d
w
=
β
2
S
d
w
+
(
1
−
β
2
)
∣
∣
d
w
∣
∣
2
S
d
b
=
β
2
S
d
b
+
(
1
−
β
2
)
∣
∣
d
b
∣
∣
2
V
d
w
c
o
r
r
e
c
t
e
d
=
V
d
w
1
−
β
1
t
V
d
b
c
o
r
r
e
c
t
e
d
=
V
d
b
1
−
β
1
t
S
d
w
c
o
r
r
e
c
t
e
d
=
S
d
w
1
−
β
2
t
S
d
b
c
o
r
r
e
c
t
e
d
=
S
d
b
1
−
β
2
t
w
=
w
−
α
V
d
b
c
o
r
r
e
c
t
e
d
S
d
w
c
o
r
r
e
c
t
e
d
+
ε
b
=
b
−
α
V
d
b
c
o
r
r
e
c
t
e
d
S
d
b
c
o
r
r
e
c
t
e
d
+
ε
\begin{align*} V_{dw} & = \beta_1V_{dw} + (1-\beta_1)dw \\ V_{db} & = \beta_1V_{db} + (1-\beta_1)db \\ S_{dw} & = \beta_2S_{dw} + (1-\beta_2)||dw||^2 \\ S_{db} & = \beta_2S_{db} + (1-\beta_2)||db||^2 \\ & V_{dw}^{corrected} = \frac{V_{dw}}{1-\beta_1^t} \\ & V_{db}^{corrected} = \frac{V_{db}}{1-\beta_1^t} \\ & S_{dw}^{corrected} = \frac{S_{dw}}{1-\beta_2^t} \\ & S_{db}^{corrected} = \frac{S_{db}}{1-\beta_2^t} \\ w & = w - \alpha\frac{V_{db}^{corrected}}{\sqrt{S_{dw}^{corrected}}+\varepsilon} \\ b & = b - \alpha\frac{V_{db}^{corrected}}{\sqrt{S_{db}^{corrected}}+\varepsilon} \\ \end{align*}
VdwVdbSdwSdbwb=β1Vdw+(1−β1)dw=β1Vdb+(1−β1)db=β2Sdw+(1−β2)∣∣dw∣∣2=β2Sdb+(1−β2)∣∣db∣∣2Vdwcorrected=1−β1tVdwVdbcorrected=1−β1tVdbSdwcorrected=1−β2tSdwSdbcorrected=1−β2tSdb=w−αSdwcorrected+εVdbcorrected=b−αSdbcorrected+εVdbcorrected
刚刚讲过的RMS特点其实是动态的调整了我们的学习率,之前讲Momentum其实还保持了上一时刻的方向,RMS就没有解决这个问题,RMS把上一时刻的方向给弄没了。
RMS,它的定义其实就没有考虑上次的方向,它只考虑上次变化的大小。而现在提出来这个ADAM,这个ADAM的意思就是Adaptive Momentum, 还记不记得咱们讲随机森林和Adaboost那一节,我们讲过Adaboost就是Adaptive Boosting,这里的Adaptive其实就是一个意思,就是自适应动量,也叫动态变化动量。
ADAM就结合了RMS和动量的两个优点。第一个是他在分母上也加了一个根号下的数,也就做了RMS做的事,然后在分子上还有一个数,这个数就保留了上一时刻的数,比如 V d w c o r r e c t e d V_{dw}^{corrected} Vdwcorrected, 就保留了上一时刻的V,就保留了上一时刻的方向。
所以ADAM既是动态的调整了学习率,又保留了上一时刻的方向。
那除此之外,其实还有一个AdaGrad和L-BFGS方法,不过常用的方法也就是上面详细讲的这几种。
到此为止,我们进阶神经网络的基础知识就都差不多具备了,接下来我们就该来讲解下卷机和序列,比如说LSTM和RNN、CNN的东西。在这些结束之后,我们还会有Attention机制,Transformer机制,YOLO机制,Segmentation机制,还有强化深度学习其实都是基于这些东西。
那我们下节课,就先从RNN来说开去。