4.1 车载毫米波雷达技术原理
毫米波雷达系统可实现距离测量、速度测量和角度测量三大基本功能。车载毫米波雷达 常用调频连续波(FMCW)雷达,其工作频率随时间做周期性线性变化,能测速和测距,适合做 近距离测量,有较高的测量精度。
具体而言,测距方面,FMCW 毫米波雷达通过发射天线发射电磁波,由接收天线捕捉目标 反射的信号,测量发射信号和接收信号之间的频率差来确定目标的距离。毫米波雷达测距能 力与发射功率、天线增益、物体反射截面积等因素有关。发射功率越大、天线增益越高、物 体反射截面积越大,雷达能检测到的有效回波越强,测量距离就越远。距离分辨率与雷达信 号的有效带宽成反比,测距精度与信号带宽和信噪比成反比。
毫米波雷达对目标速度的测量通常通过两种方式来实现。一种方式是基于多普勒原理, 通过检测反射信号和发送信号的频率差,测得目标相对于雷达的运动速度。另一种方式是基 于跟踪位置(角度),进行微分得到速度。测速精度和速度分辨率都与信号时宽成反比。信号波长越短,测速精度和速度分辨率越高。
毫米波雷达对目标角度的测量主要是通过并列的多个接收天线收到同一个目标反射回来的若干毫米波的相位差来确定目标的方位角计算。角分辨率的高低与天线孔径大小成正比。 孔径越大,角分辨率越高。提升角分辨率可以从硬件和软件两个方面着手。在硬件上,增加 天线的数量。使用 MIMO 技术,利用多发多收的天线布局形成的虚拟孔径阵列,进而提高角分 辨率。在软件上,通过 AI 算法增加虚拟通道数。傲酷推出虚拟孔径成像技术(VAI)+独特天 线设计,在硬件成本、尺寸、功耗、体积不变的条件下,极大提升角分辨率。
4.2 4D成像雷达技术路线分析
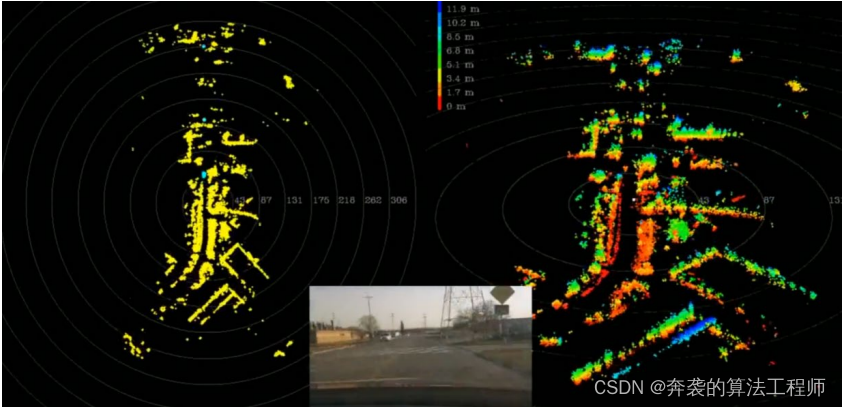
4D成像雷达利用更强大的硬件(增加前端物理通道数+后端的处理资源)和软件算法生成 更多高质量的点云。行业内玩家围绕增加天线收发通道数做 4D 成像雷达开发,当前使用较多 的有三种技术路线。
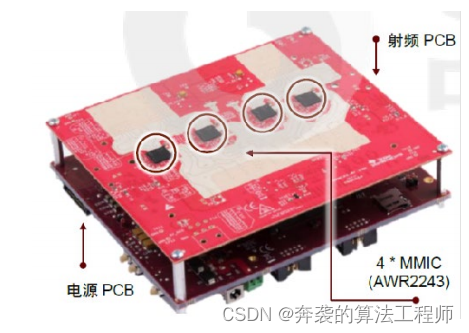
第一种是多片级联方案 ,即基于传统 77/79GHz 标准 MMIC 芯片进行二片/四片/八片级联, 增加实体天线 MIMO。代表厂商有大陆、博世、采埃孚、楚航科技、森思泰克、华为、特斯拉 等一众厂商。这种方案的优点在于射频前端多样组合,芯片方案成熟,可加快产品上市进程, 是当前主流方案。但劣势在于雷达尺寸较大、功耗较高,信噪比较低,中频信号同步难度大, 后端处理要求高。
图表 29 基于 TI 2243 四片级联方案
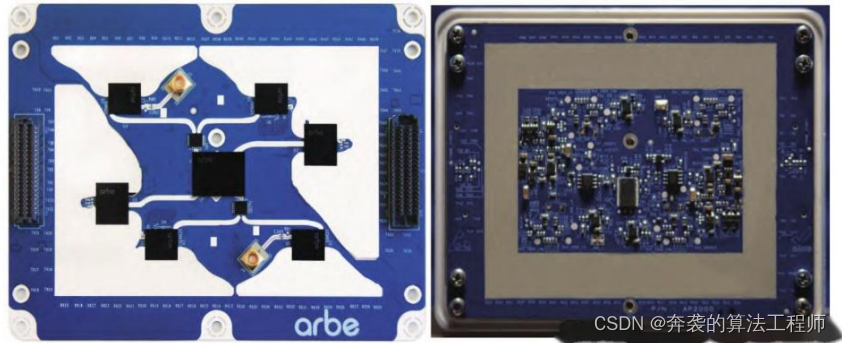
第二种方案是自研大规模多通道片上集成电路。 将多发多收天线集成在一颗 ASIC 芯片,直接提供成像雷达芯片。代表厂商是 Arbe、Vayyar、Uhnder 等小型科技公司。这种方案的优势在于集成度高、体积小,顺应小型化趋势,可避免与成熟企业的直接竞争,具备差异化优势,但该方案的研发难度比多片级联方案高得多,还需要解决天线密集布置、天线之间互相干扰、降低功耗、散热、提升信噪比等问题。
图表 30 Arbe 4D 成像雷达系统实物图
第三种方案是基于市场主流的车规级标准雷达芯片,使用虚拟孔径成像算法+独特天线设计,实现 4D 点云成像。 代表厂商是傲酷。虚拟孔径成像雷达使用动态、自适应波形,通过软件提升角分辨率。优势是无需增添更多实体天线,也不需要显著增加雷达系统的成本、尺寸和功耗,便可提升雷达的性能。当前,福瑞泰克已推出采用虚拟孔径成像技术(VAI)以及独特天线设计的 4D 成像雷达。
4.3 车载毫米波雷达技术发展趋势
车载毫米波雷达将向着高分辨率、低成本、小尺寸、低功耗的方向发展 。由传统毫米波雷达升级而来的 4D 成像雷达,仍处于发展的早期。未来将采用新材料、新工艺、新架构、新算法,推动毫米波雷达技术一步步向前迭代。
一、前端 MMIC 工艺由锗硅(SiGe)转向先进制程的 CMOS 工艺 。MMIC 芯片的射频材料最初使用砷化镓,砷化镓基底损耗最低,性能最好,但成本高、集成度低。一个雷达需要配置多个分立组件,造成雷达尺寸较大,价格昂贵。后来发展到锗硅工艺,射频性能较好,集成度提高,且成本更低,但功耗较高。作为后起之秀的 CMOS 工艺,能进一步降低成本,提高集成度,同时降低功耗,将成为主要发展方向。
二、天线从微带天线向波导天线演进 。微带天线由于其低剖面、低成本的特点而广泛应用于各种车载雷达上。但在毫米波频段,微带阵列天线馈电网络损耗较大,辐射效率较低。未来,4D 成像雷达将使用波导天线,降低损耗,增大辐射效率,使雷达的探测距离变得更远,同时减小雷达体积。
三、毫米波雷达由分布式雷达转向使用集中处理架构的卫星雷达 。通过集中式架构,雷达前端用来实现射频收发和底层的信号处理,雷达信号处理的后半部分(CFAR 目标筛选开始)以及数据处理从毫米波雷达模组中剥离,转移进入域控制器中,利用域控制器芯片的计算能力,降低毫米波雷达模组的成本,缩小雷达的体积。同时,更好地实现雷达 AI 算法、超分辨算法在后端的部署,提升雷达性能。
四、在雷达信号处理中,机器学习将成为提升的方向之一 。集中式域架构下,4D 成像雷达输出的密集点云可以使用机器学习技术来训练雷达感知系统,帮助解决传统毫米波雷达无法克服的边缘检测、分类等难题。而机器学习的运用,必须在域控制器上配置适合于神经网络处理的计算单元。在下一代的域控制器产品中,安波福等厂家都已经将此项能力作为重点来布局。





![[架构之路-247]:目标系统 - 设计方法 - 软件工程 - 结构化方法的基本思想、本质、特点以及在软件开发、在生活中的应用](https://img-blog.csdnimg.cn/eec47958ab184d6d818aeab39d796148.png)