拓扑结构
点云是一种三维数据,有几种方法可以描述其空间结构,以利于展开搜索
https://blog.csdn.net/weixin_45824067/article/details/131317939
KD树
头文件:pcl/kdtree/kdtree_flann.h
函数:pcl::KdTreeFLANN
作用:
用于范围搜索:比如搜索给定点指定半径内存在的点
用于最近邻居搜索:比如搜索距离指定点最近的点
用于支持其他高级操作
八叉树
头文件:pcl/octree/octree_search.h
函数:pcl::octree::OctreePointCloudSearch
作用:
用于空间搜索:与前面类似,搜索指定点附近的点,或以体素为单位搜索,直接返回指定点锁所在的体素,或直接搜索返回K个邻近点,或搜索指定半径内的邻近点
体素化:通过八叉树将点云数据分割为一系列体素(立方体)。每个体素代表一个固定大小的区域,并包含在该区域内的点云数据。如此,可以估计点云密度,表面重建等,支持更高级的点云处理任务
滤波器
https://blog.csdn.net/weixin_45824067/article/details/131334072
点云传统滤波算法_点云高斯滤波_Man_1man的博客-CSDN博客
上面两个链接都有代码
分割功能滤波
分割功能滤波是一种常用的点云处理方法,可以将点云数据分割为不同的部分,以便对每个部分进行独立处理。
直通滤波
头文件:pcl/filters/passthrough.h
函数:pcl::PassThrough
介绍:直通滤波是一种基于范围过滤的方法,用于通过限制某个维度的范围来滤除点云数据中不需要的部分
作用:用于去除在指定范围之外的离群点、空间限定区域或多余的数据。直通滤波通常在建立好KD树之后进行,以提高滤波的效率。
条件滤波
头文件:pcl/filters/conditional_removal.h
函数:pcl::ConditionalRemoval
介绍:条件滤波(Conditional Filter)是一种基于条件的点云滤波方法,可以根据给定的条件筛选出满足条件的点云数据,从而去除不需要的点云数据,有点分段函数的味道,当点云在一定范围则留下,不在则舍弃。直通滤波器是一种较简单的条件滤波器,其更像是一个不带有滤波核的工具。
提取索引滤波
头文件:pcl/filters/extract_indices.h
函数:pcl::ExtractIndices
介绍:提取索引滤波(Extract Indices Filter)是一种常用的点云滤波方法,其主要目的是提取指定索引范围内的点云数据,以去除不需要的点云数据。
下采样类滤波
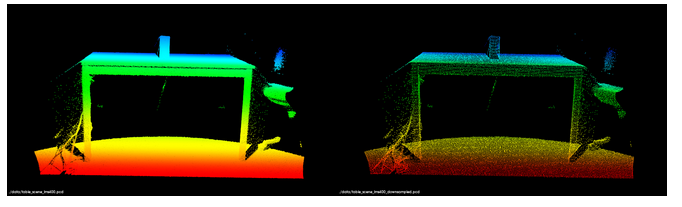
体素网格下采样
头文件:pcl/filters/voxel_grid.h
函数:pcl::VoxelGrid
介绍:体素滤波根据给定的点云构造一个三维体素栅格并进行下采样达到滤波的效果。通过输入的点云数据创建一个三维体素栅格,然后将每个体素内所有的点都用该体素内的代表点(重心)来近似,这样就大大减少了数据量。体素滤波器可以达到向下采样同时不破坏点云本身几何结构的功能,但是会移动点的位置。此外体素滤波器可以去除一定程度的噪音点及离群点。
特点:体素滤波根据给定的点云构造一个三维体素栅格并进行下采样达到滤波的效果。通过输入的点云数据创建一个三维体素栅格
,然后将每个体素内所有的点都用该体素内的代表点(重心)来近似,这样就大大减少了数据量。体素滤波器可以达到向下采样同时不破坏点云本身几何结构的功能,但是会移动点的位置。此外体素滤波器可以去除一定程度的噪音点及离群点。
均匀采样滤波
头文件:pcl/filters/uniform_sampling.h
函数:pcl::UniformSampling
介绍:均匀采样滤波基本上等同于体素滤波器,但是其不改变点的位置。下采样后,其点云分布基本均匀,但是其点云的准确度要好于体素滤波,因为没有移动点的位置
去除噪声点类滤波
统计学离群点移除过滤器
头文件:pcl/filters/statistical_outlier_removal.h
函数:pcl::StatisticalOutlierRemoval
介绍:用于去除明显离群点。离群点特征是在空间中分布稀疏。激光扫描通常会生成不同点密度的点云数据集,测量误差也会导致稀疏的异常值/离群点。考虑到离群点的特征,则可以定义某处点云小于某个密度,既点云无效。
具体步骤:对于每个点,计算从它到其最近的k个点平均距离。通过假设点云中其点的距离结果分布是具有均值和标准差的高斯分布,根据给定均值与方差,平均距离在标准范围之外的点,可以被定义为离群点并从数据中去除。
特点:主要是根据密度去除离群点(去噪),对密度差异较大的离群点效果较好。
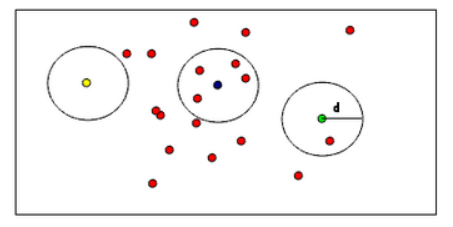
半径离群值滤波
头文件:pcl/filters/radius_outlier_removal.h
函数:pcl::RadiusOutlierRemoval
介绍:半径滤波(Radius Outlier Removal Filter)半径滤波通过计算每个点与周围点的距离,判断该点是否为离群点,并将其从点云数据中去除。
步骤:以某点为中心画一个圆计算落在该圆中点的数量,当数量大于给定值时,则保留该点,数量小于给定值则剔除该点。
特点:半径滤波器与统计滤波器相比更加简单粗暴。此算法运行速度快,依序迭代留下的点一定是最密集的,但是圆的半径和圆内点的数目都需要人工指定。
高斯滤波
头文件:pcl/filters/convolution.h pcl/filters/convolution_3d.h
函数:pcl::filters::GaussianKernel 或pcl::GaussianFilter类 pcl::filters::Convolution3D
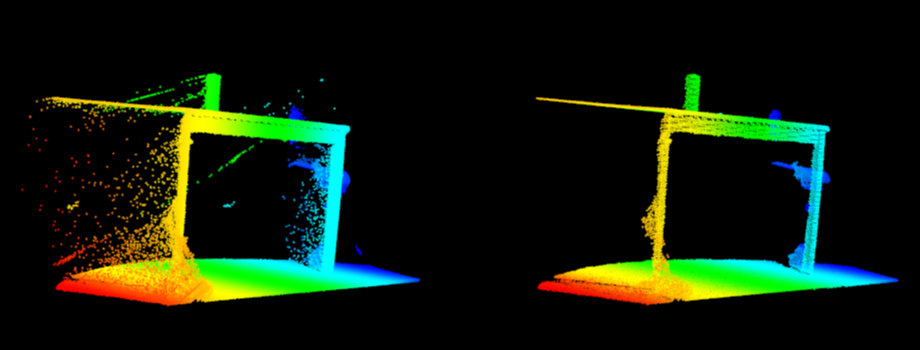
介绍:高斯滤波(Gaussian Filter)其主要目的是平滑点云数据以去除噪声。高斯滤波器的基本思想是将每个点周围的点用高斯函数进行加权平均,从而达到平滑点云数据的效果。其李永乐高斯函数经傅里叶变换后仍具有高斯函数的特性,令指定区域的权重为高斯分布,从而将高频的噪声点滤除。在点云处理中,高斯滤波通常被用于去除高频噪声。
特点:高斯滤波平滑效果较好,但是边缘角点也会被较大的平滑。
双边滤波
头文件:pcl/filters/bilateral.h
函数:pcl::BilateralFilter
介绍:其主要目的是平滑点云数据以去除噪声,同时保留点云数据的边缘和细节信息。双边滤波器的基本思想是将每个点周围的点用高斯函数和距离函数进行加权平均,从而达到平滑点云数据的效果。双边滤波既可以平滑点云数据,又可以保留边缘和细节信息,因此在点云处理中应用广泛。此外,去噪效果效果需要根据实际点云情况,不是所有需要平滑和保留边缘的情况使用;有两个参数需要调整,需要多次实验。
特点:双边滤波是结合图像的空间[像素范围域(range domain)]邻近度和像素值相似度的一种折中处理,同时考虑空域[空间域(spatial domain)]信息和灰度相似性,达到保边去噪(既有效地对空间三维模型表面进行降噪,又可以保持点云数据中的几何特征信息,避免三维点云数据被过渡光滑)的目的。对点云数据的小尺度起伏噪声进行平滑光顺。
注意:能使用双边滤波的点云必须得包含强度字段。现有的points类型中,只有PointXYZI和PointXYZINormal有强度信息。FastBilateralFilter只适用于有序点云。
随机采样一致滤波
头文件:pcl/sample_consensus/ransac.h
pcl/sample_consensus/sac_model_plane.h
pcl/sample_consensus/sac_model_sphere.h
函数:pcl::RandomSampleConsensus
介绍:随机采样一致滤波(Random Sample Consensus Filter,RANSAC Filter)其主要目的是去除点云数据中的离群点(outliers)。随机采样一致滤波器的基本思想是随机选择一组点作为模型,计算其他点到该模型的距离,从而找到最佳的模型,并将该模型上的点作为局内点(inliers),将其他点作为离群点(outliers)进行删除。随机采样一致滤波既可以去除离群点,又可以保留点云数据的形状和结构信息,因此在点云处理中应用广泛。
特点:主要用于排除错误样本,可以从一组包含“局外点”的观测数据中,通过迭代的方式估计数学模型参数。
声明:本文总结于上列参考文章,系学习所用。