文章目录
- 第2章 数学模型
- 2.1 控制系统的运动微分方程
- 2.2 拉氏变换和反变换
- 2.3 传递函数
- 2.4 系统框图
- 2.4.1 系统框图
- 2.4.2 系统框图的简化
- 2.4.3 梅森公式
- 2.4.4 例题
- 答案
- 解析——梅森公式
- 2.5 控制系统传递函数
- 2.5.1 闭环系统的开环传递函数
- 2.5.2 参考输入R(s)作用下的闭环传递函数
- 2.5.3 扰动 D(s) 作用下的闭环传递函数
- 2.5.4 当系统同时受到R(s)和D(s)时,由叠加原理得系统的总输出、误差
第2章 数学模型
2.1 控制系统的运动微分方程
2.2 拉氏变换和反变换
2.3 传递函数
参考前文:【自动控制原理】数学模型:控制系统的运动微分方程、拉氏变换和反变换、传递函数
2.4 系统框图
2.4.1 系统框图
2.4.2 系统框图的简化
2.4.3 梅森公式

2.4.4 例题

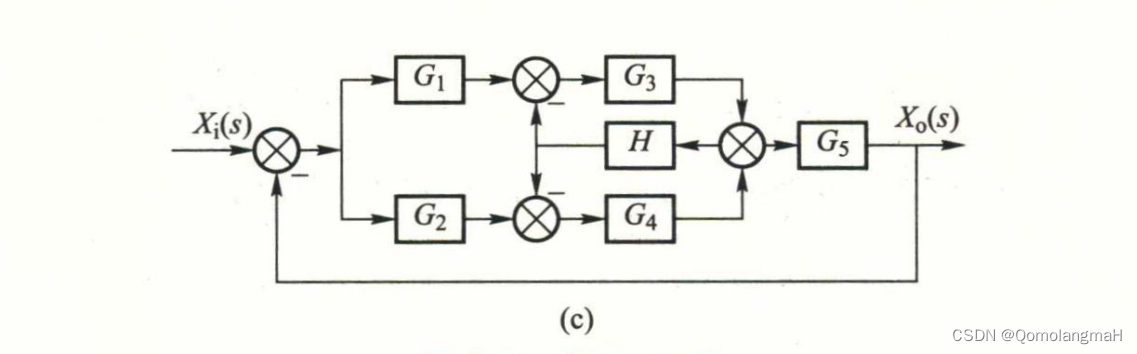
答案
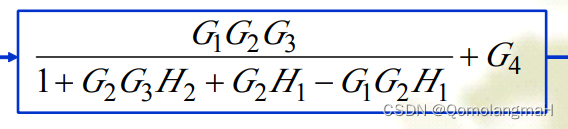


解析——梅森公式
2.5 控制系统传递函数
控制系统工作时受到两类信号的作用:
- 有用信号,或称输入信号、给定值、指令以及参考输入
- 干扰,一般作用在被控对象上,也可能出现在其他元部件上
144855861.png&pos_id=img-05FPpu9Y-1698911805452)
- 研究系统输出量的运动规律,只考虑输入量的作用是不完全的,还需要考虑干扰的影响
- 依据:线性系统的叠加原理
2.5.1 闭环系统的开环传递函数
-
将H(s)的输出通道断开,前向通道的传递函数与反馈通道的传递函数的乘积G1(s) G2(s) H(s),称为系统的开环传递函数。
-
系统**反馈量 B(s) 与误差信号 E(s) **的比值也称为闭环系统的开环传递函数
-
闭环系统的开环传递函数只有一个!!!

2.5.2 参考输入R(s)作用下的闭环传递函数
令D(s)=0,则框图变为


2.5.3 扰动 D(s) 作用下的闭环传递函数
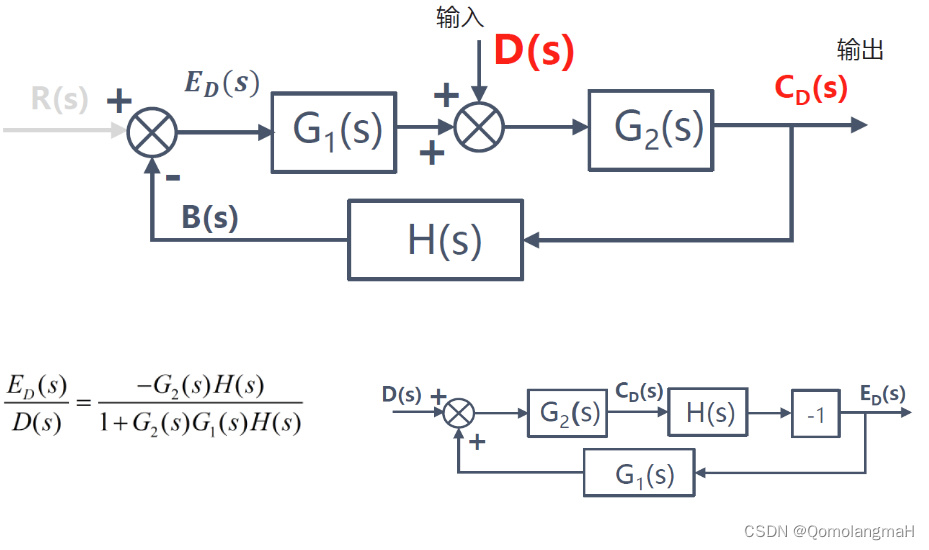
2.5.4 当系统同时受到R(s)和D(s)时,由叠加原理得系统的总输出、误差
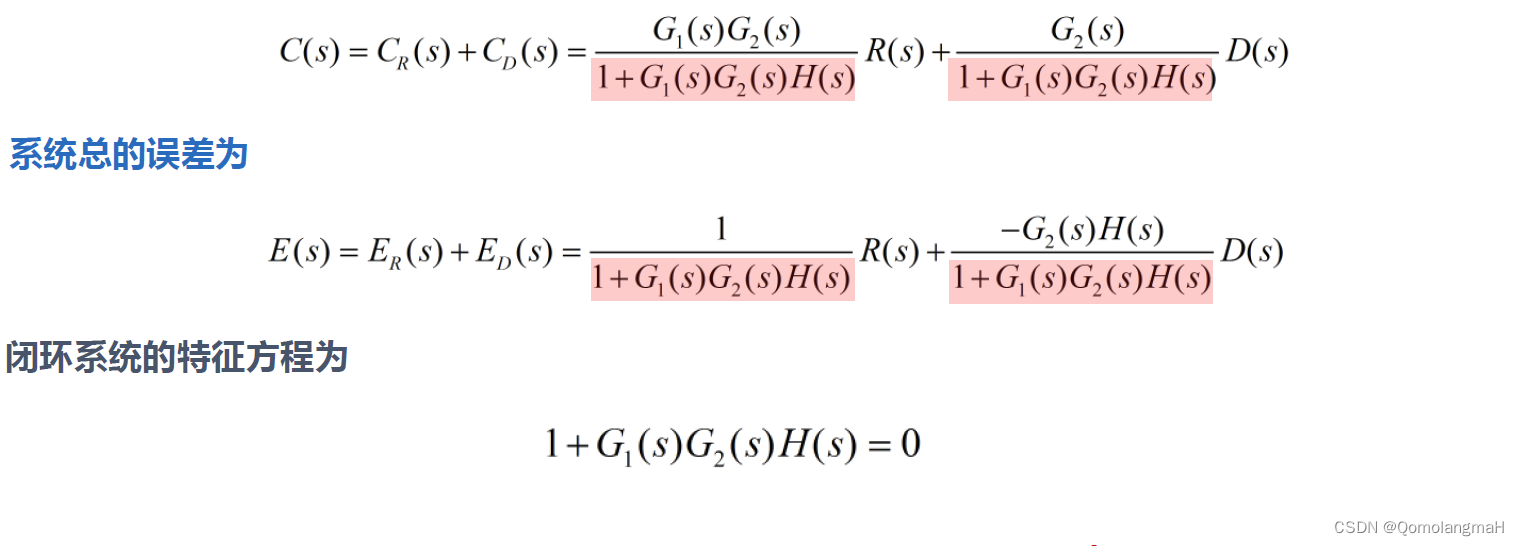
- 任何一个外部输入对其某一个变量之间的传递函数的分母多项式都是相同的
- -----闭环系统的特征方程只有一个