文章目录
- 前言
- 一、AVL树
- 1、AVL树概念
- 2、AVL树模拟实现
- 3、AVL树的旋转操作
- 3.1 左单旋
- 3.2 左单旋代码实现
- 3.3 右单旋
- 3.4 右单旋代码实现。
- 3.5 什么时候调用左单旋和右单旋
- 3.6 左右双旋
- 3.7 左右双旋代码实现
- 3.8 右左双旋
- 3.9 右左双旋代码实现
- 3.10 什么时候调用左右双旋和右左双旋
- 4、测试
- 5、总结
- 6、AVL树的性能
- 7、AVL树的结点删除
- 8、代码
前言
一、AVL树
1、AVL树概念
前面对map/multimap/set/multiset进行了简单的介绍,在其文档介绍中发现,这几个容器有个共同点是:其底层都是按照二叉搜索树来实现的,但是二叉搜索树有其自身的缺陷,假如往树中插入的元素有序或者接近有序,二叉搜索树就会退化成单支树,时间复杂度会退化成O(N),因此map、set等关联式容器的底层结构是对二叉树进行了平衡处理,即采用平衡树来实现。
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
- 它的左右子树都是AVL树
- 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
- 如果一棵二叉搜索树是高度平衡的,它就是AVL树。如果它有n个结点,其高度可保持在 O ( l o g 2 n ) O(log_2 n) O(log2n),搜索时间复杂度O( l o g 2 n log_2 n log2n)。
2、AVL树模拟实现
下面我们求AVL树的平衡因子采用的是右子树高度减左子树高度。
我们将AVL树的结点定义为下面这样
template<class K, class V>
class AVLTreeNode
{
AVLTreeNode<K, V>* _left; //当前结点左孩子
AVLTreeNode<K, V>* _right; //当前结点右孩子
AVLTreeNode<K, V>* _parent; //当前结点父结点
pair<K, V> _kv;
int _bf; //平衡因子
AVLTreeNode(const pair<K, V>& kv)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _kv(kv)
, _bf(0)
{
}
};
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树也可以看成是二叉搜索树。下面我们先来实现二叉搜索树的插入结点的方法。
template<class K, class V>
class AVLTree
{
typedef AVLTreeNode<K, V> Node;
public:
bool Insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
return true;
}
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
//找到结点要插入的位置,将结点链接到二叉搜索树中
cur = new Node(kv);
if (parent->_kv.first < cur->_kv.first)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
//将父结点也改变
cur->_parent = parent;
return true;
}
private:
Node* _root = nullptr;
};
}
上面的代码中我们就初步完成了二叉搜索树的结点插入,因为AVL树的插入需要保持平衡因子,所以我们在插入新结点时还需要来维护平衡因子。
当插入新结点cur后,我们就需要更新parent的平衡因子。在插入cur之前,parent的平衡因子分为三种情况:-1,0,1。
(1). 如果cur插入到parent的左侧,只需给parent的平衡因子-1即可。即parent->_bf- -;
(2). 如果cur插入到parent的右侧,只需给parent的平衡因子+1即可。即parent->_bf++;
当更新完parent的平衡因子后,可能会影响parent的祖先的平衡因子(全部祖先或部分祖先),parent的平衡因子可能会出现下面的三种情况:
(1). 如果parent的平衡因子为0,说明插入之前parent的平衡因子为正1或负1,插入后被调整为0,此时还满足AVL树的性质,所以当前cur结点插入成功。此时以parent为根的树的高度不变,不用继续往上更新。
(2). 如果parent的平衡因子为正1或负1,说明插入前parent的平衡因子一定为0,插入后被更新成正1或负1,此时以parent为根的树的高度增加,需要继续向上更新父结点的平衡因子。
(3). 如果parent的平衡因子为正2或负2,则parent的平衡因子违反平衡树的性质,需要对其进行旋转处理。
下面我们来使用代码实现上面的分析过程。
bool Insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
return true;
}
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
//找到结点要插入的位置,将结点链接到二叉搜索树中
cur = new Node(kv);
if (parent->_kv.first < cur->_kv.first)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
//将父结点也改变
cur->_parent = parent;
//更新平衡因子
while (parent)
{
//先判断cur插入到parent的左边或右边,然后更新parent的平衡因子
if (cur == parent->_right)
{
parent->_bf++;
}
else
{
parent->_bf--;
}
//判断更新后parent的平衡因子为多少,是否还需要继续向上更新祖先的平衡因子
if (parent->_bf == 1 || parent->_bf == -1)
{
//说明以parent为根的树的高度改变,需要更新parent祖先的平衡因子
parent = parent->_parent;
cur = cur->_parent;
}
else if (parent->_bf == 0)
{
//说明以parent为根的树的高度不变,不需要更新parent祖先的平衡因子,插入结点成功
break;
}
else if (parent->_bf == 2 || parent->_bf == -2)
{
//说明parent的平衡因子违反AVL树的性质,需要对其进行旋转处理,使其符合AVL树性质
break;
}
else
{
//如果不是上面的任何一种情况,也报错误。
assert(false);
}
}
return true;
}
3、AVL树的旋转操作
3.1 左单旋
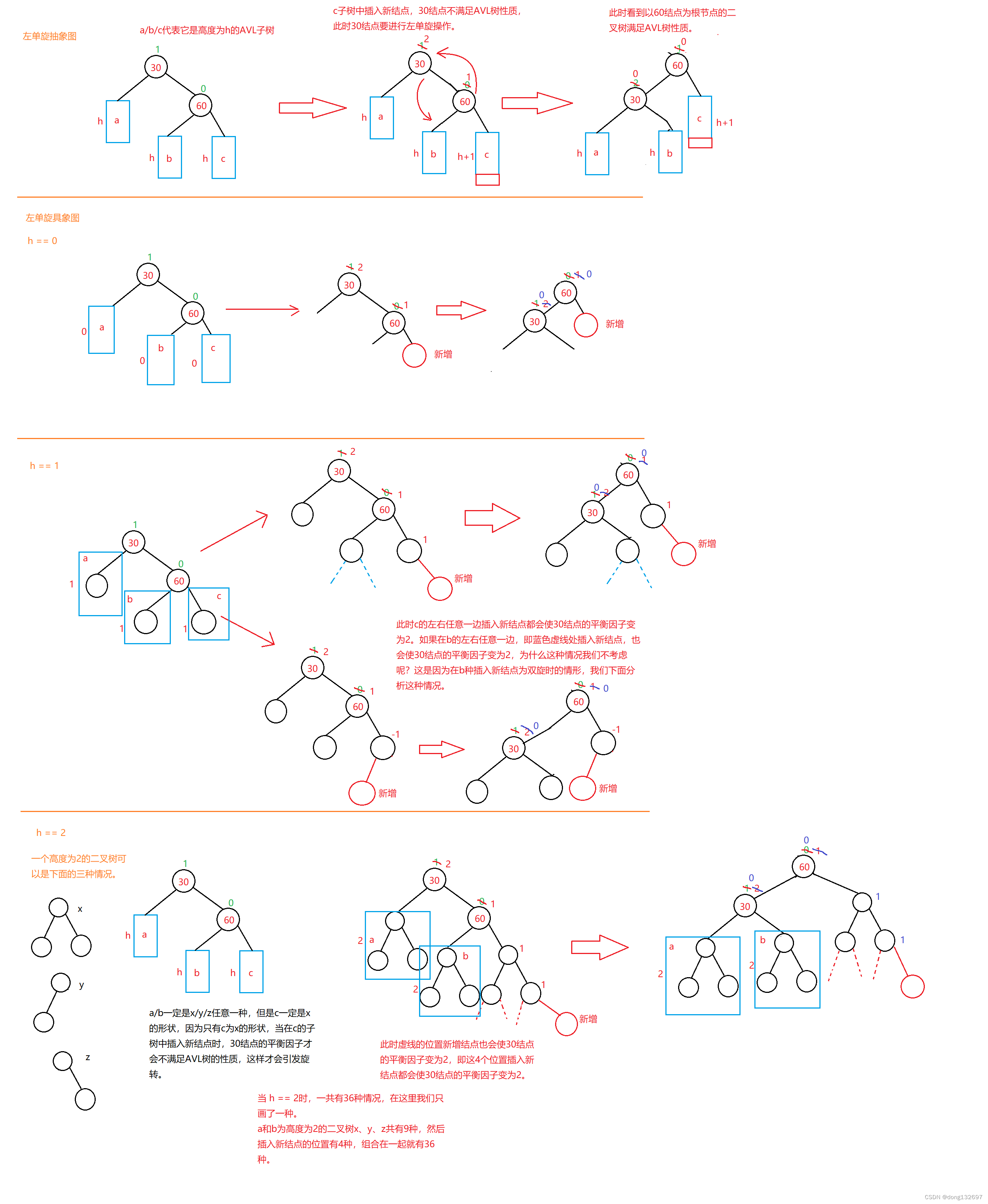
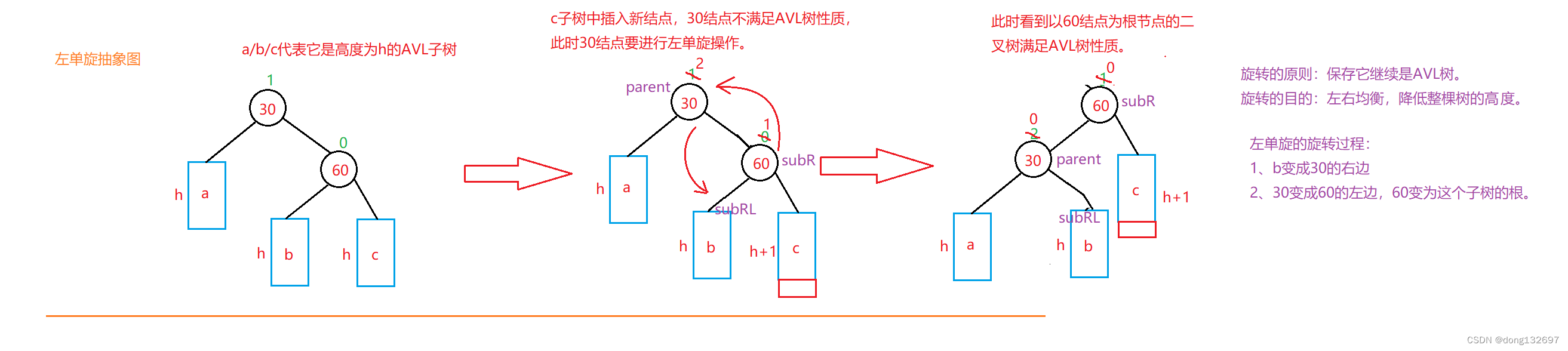
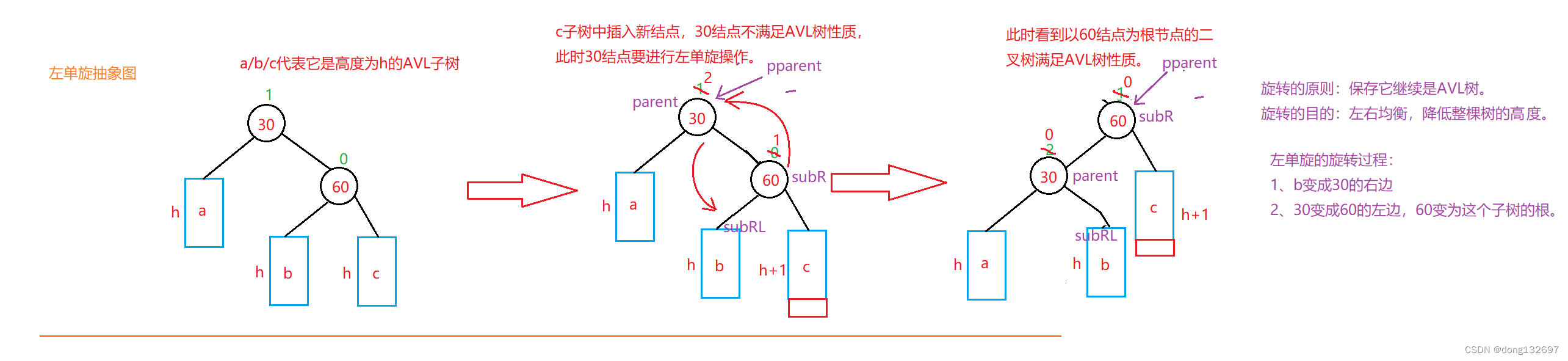
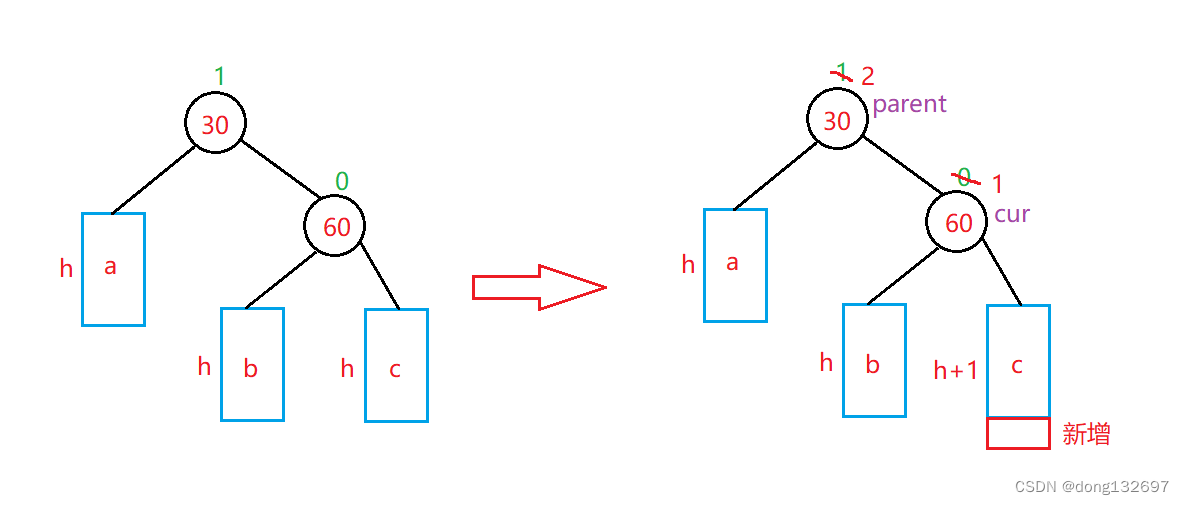
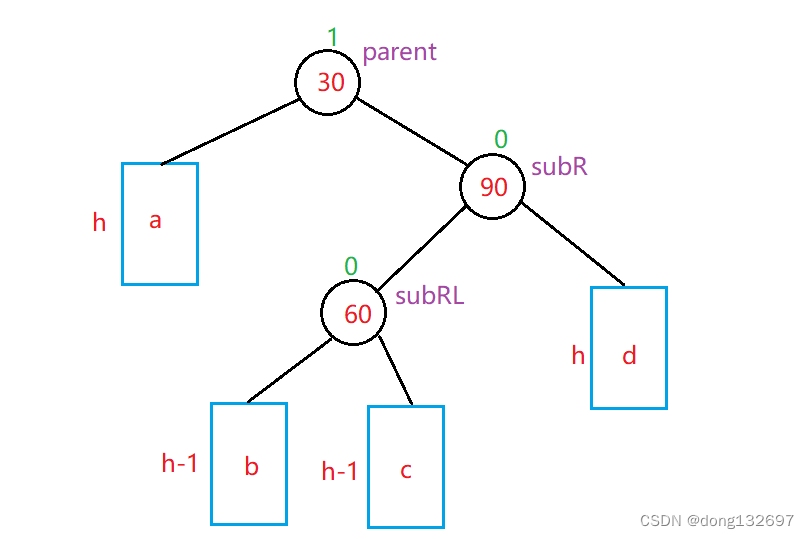
当新结点插入较高右子树的右侧时,即在c子树中插入新结点时就会引发30结点的平衡因子不符合AVL树性质。
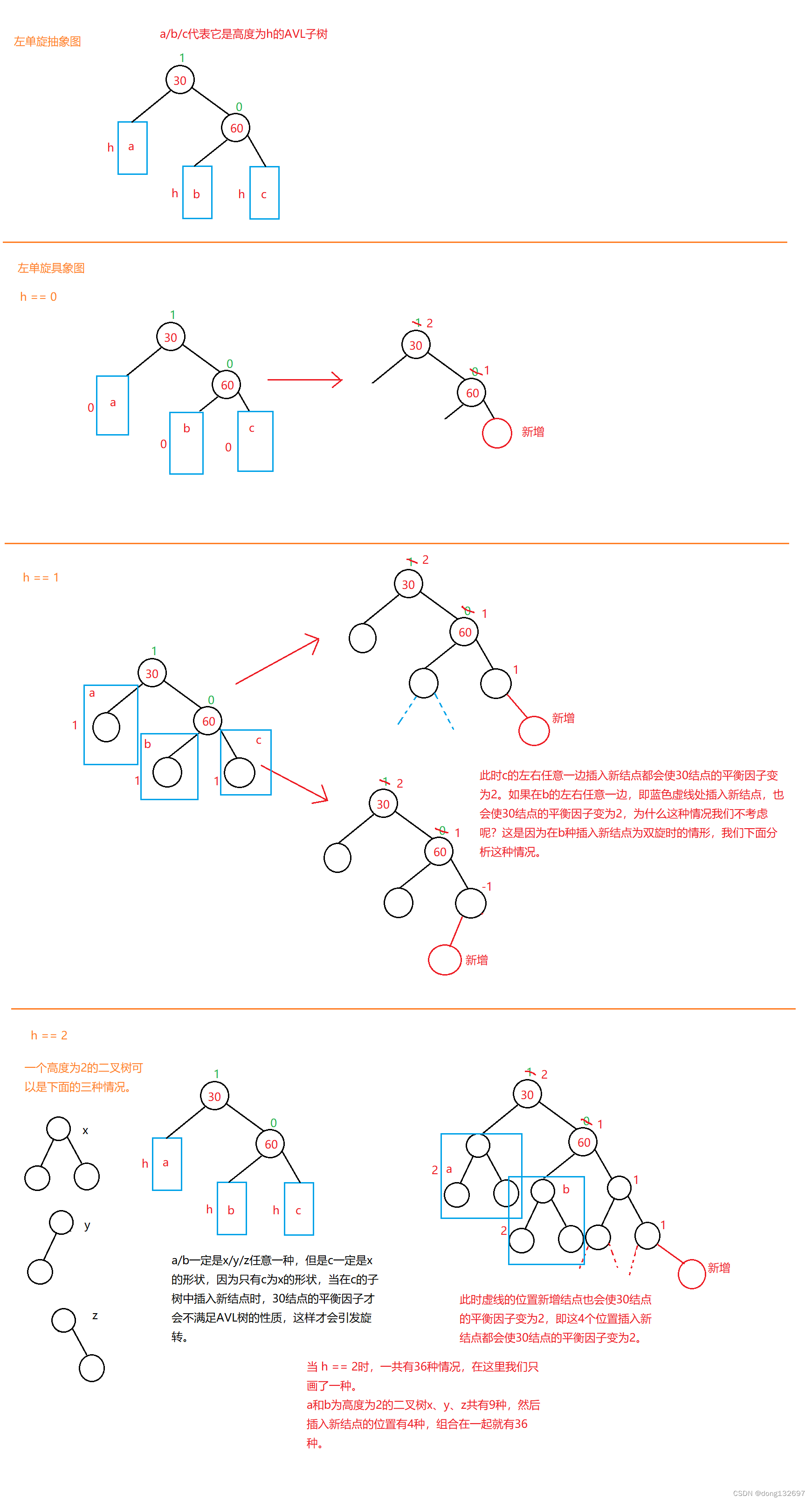
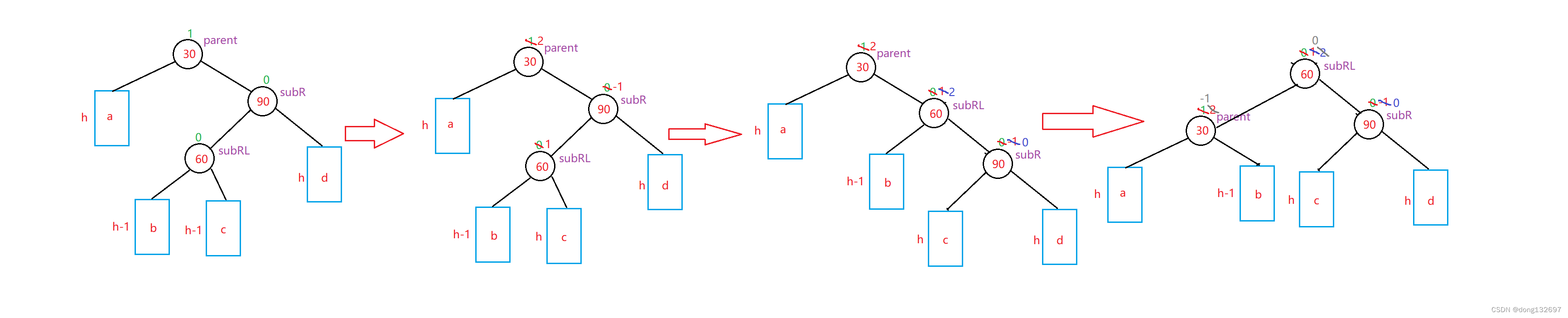
如果出现上面的情况时,我们就可以使用左单旋操作来将以30结点为根结点的这棵二叉树变为AVL树。下面的图中画了左单旋的具体操作。
3.2 左单旋代码实现
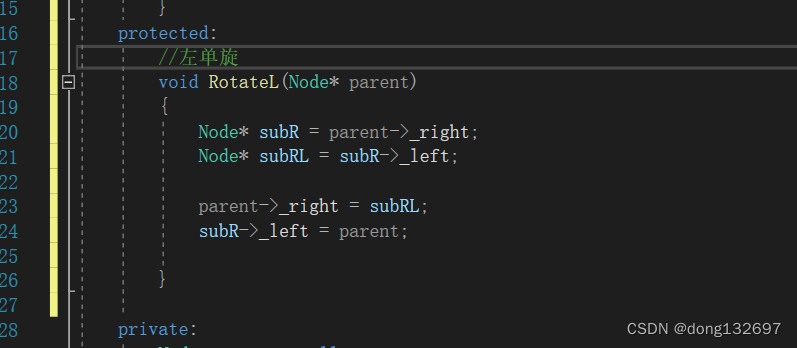
下面我们来实现左单旋操作的代码。
我们将左单旋的代码这样实现,逻辑上是对的,但是因为我们定义AVL树的结点为三叉链,而下面的代码中没有维护每个结点的 _ parent指针,这显然是不行的。
下面我们将每个结点的 _ parent指针也进行更新,但是代码中还是存在问题。即当h == 0时,subRL为nullptr,然后代码中的subRL -> _ parent就会出现错误。并且在实际中,parent不一定为根结点,所以我们还需要提前设置一个pparent指针记录parent结点的父结点,然后判断parent结点是否为根结点,如果不是根结点就需要将subR为pparent的孩子,pparent为subR的父结点。并且我们还需要记得更新每个结点的平衡因子,我们看到左单旋的过程中,parent指向的结点和subR指向的结点的平衡因子都变为0了,而其它结点的平衡因子没有变化。
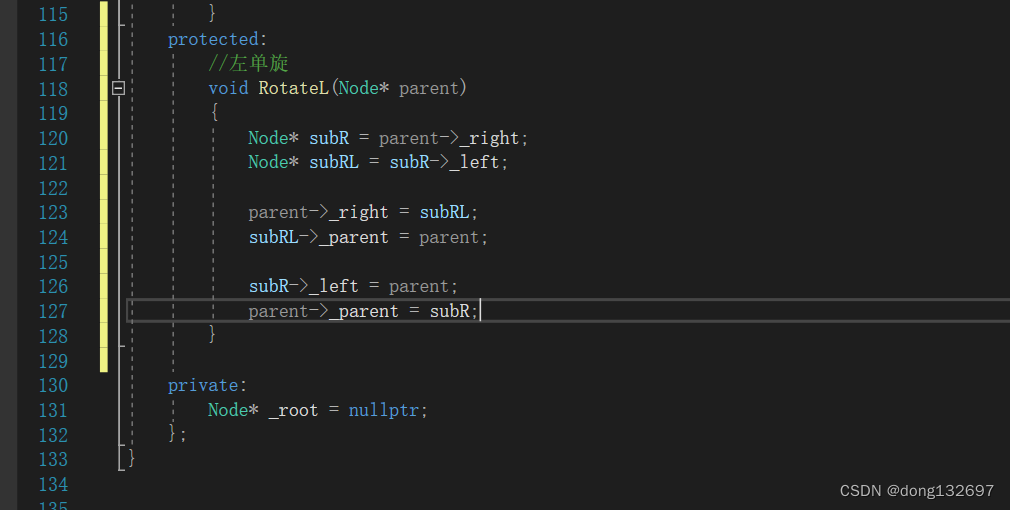
下面就是左单旋的完整代码,可以体会到左单旋的代码实现还是要注意很多细节的。
//左单旋
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
//如果subRL不为nullptr,才将subRL指向的结点的_parent指针更新
if (subRL != nullptr)
{
subRL->_parent = parent;
}
//提前记录parent指向结点的父结点的指针。
Node* pparent = parent->_parent;
subR->_left = parent;
parent->_parent = subR;
//判断parent是否为根结点,因为只有根结点没有父亲
if (pparent == nullptr)
{
//如果parent为根结点,那么左单旋后subR为新的根结点
_root = subR;
_root->_parent = nullptr;
}
else
{
//parent不为根结点,那么就将subR更新为pparent的孩子
//判断将subR为pparent的左孩子还是右孩子
if (pparent->_left = parent)
{
pparent->_left = subR;
}
else
{
pparent->_right = subR;
}
subR->_parent = pparent;
}
//更新结点平衡因子
parent->_bf = 0;
subR->_bf = 0;
}
3.3 右单旋
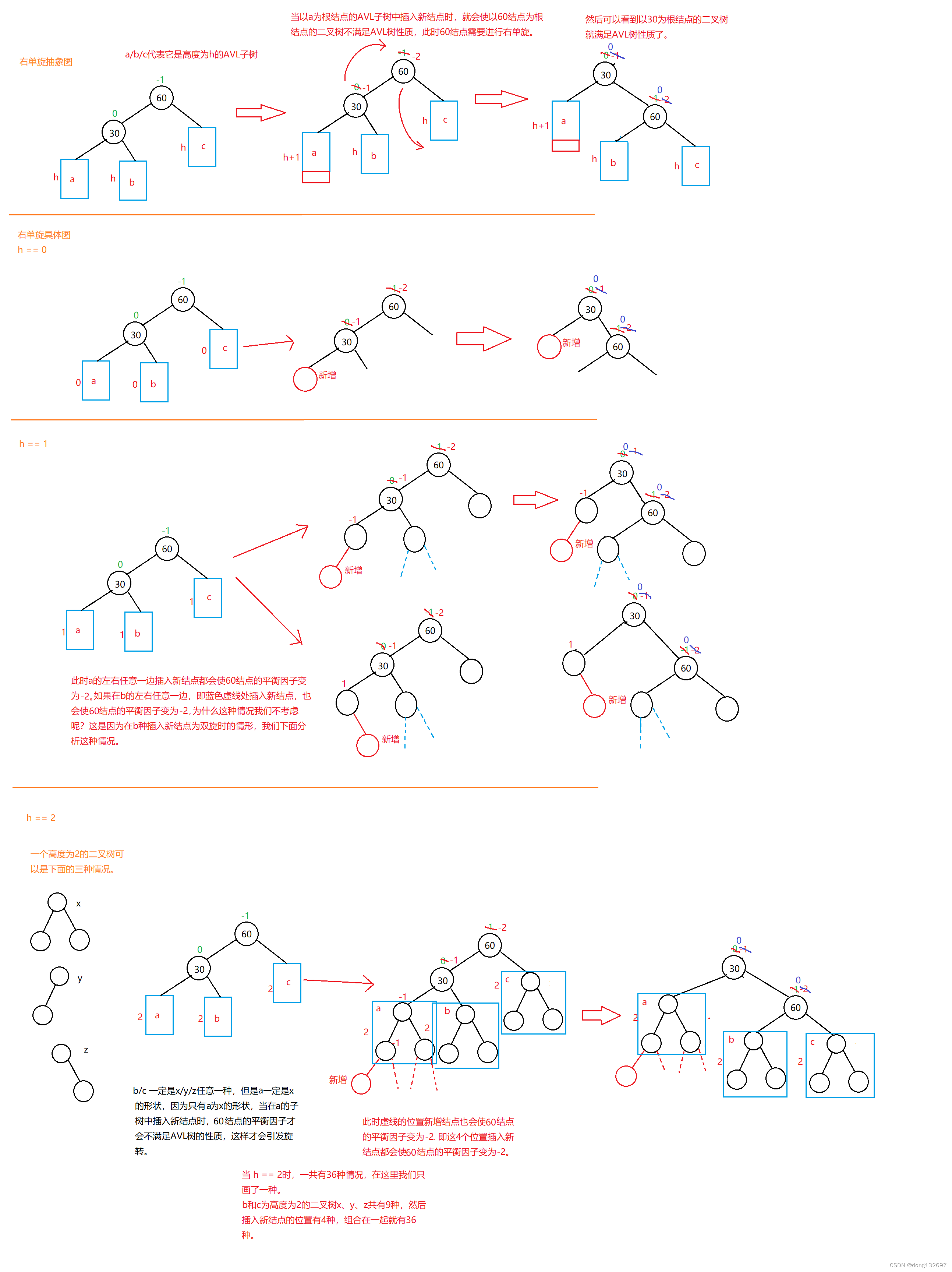
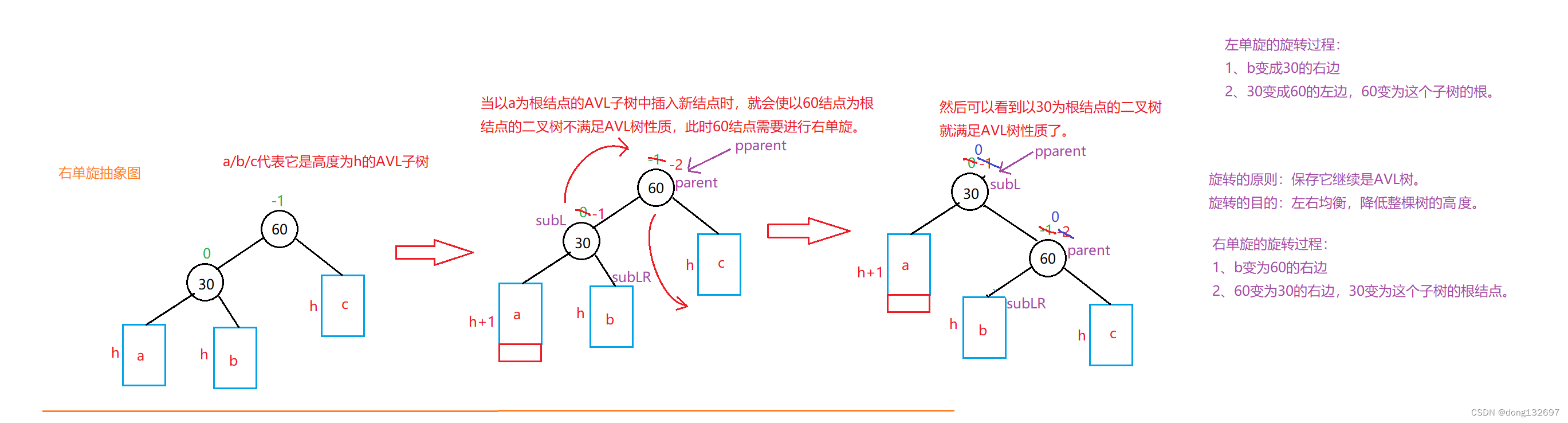
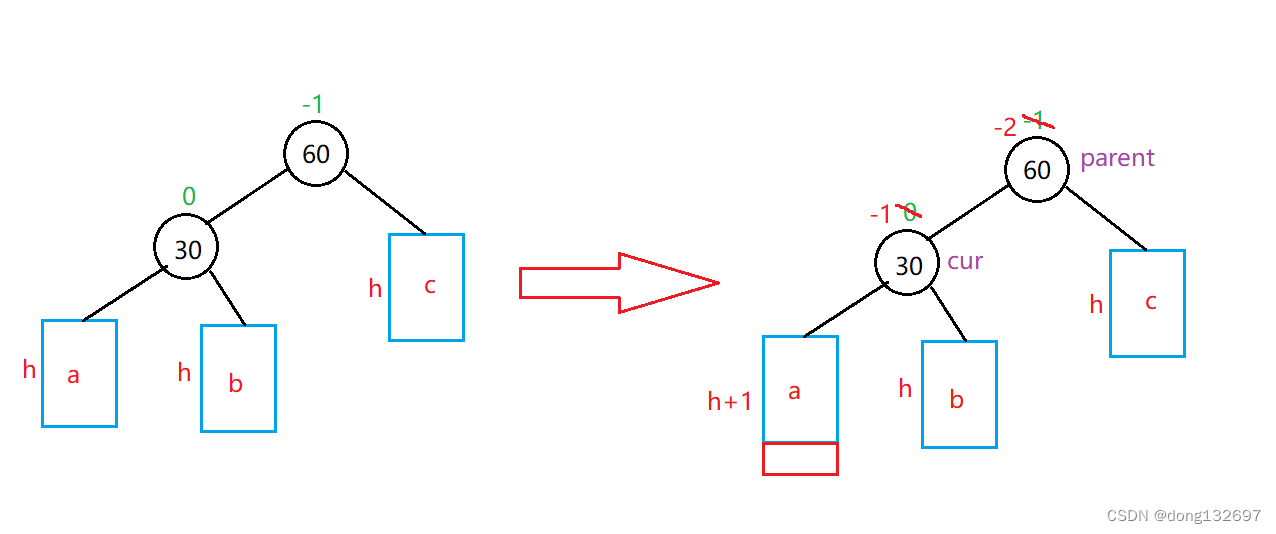
下面我们再来分析右单旋的情况。当新节点插入较高左子树的左侧时,即在a子树中插入新结点时就会引发60结点的平衡因子不符合AVL树性质。
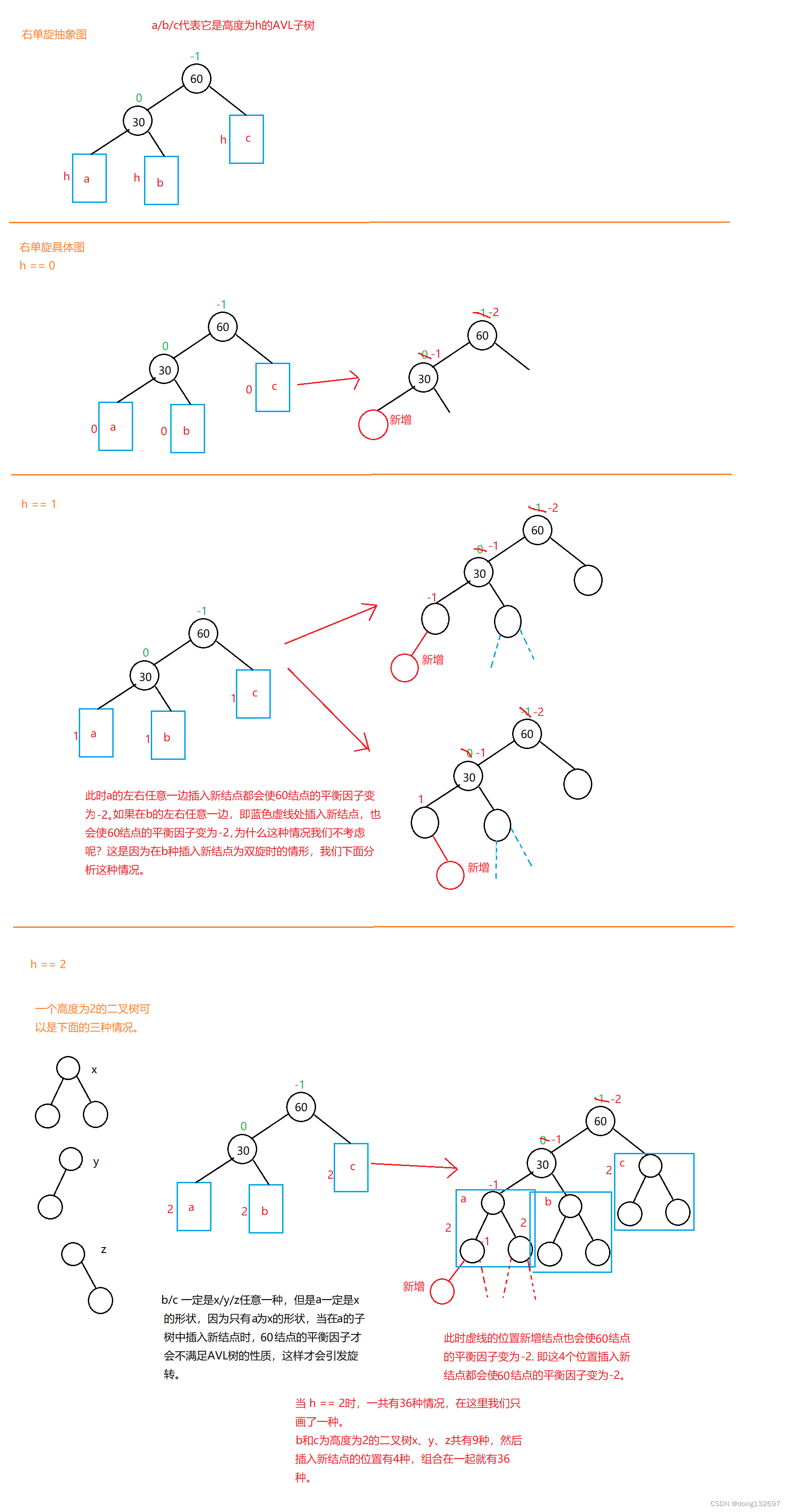
如果出现上面的情况时,我们就可以使用右单旋操作来将以60结点为根结点的这棵二叉树变为AVL树。下面的图中画了右单旋的具体操作。
3.4 右单旋代码实现。
前面我们已经实现了左单旋的代码,那么右单旋的代码实现和左单旋类似,我们一样需要注意上面的一些细节。
//右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
//判断subLR是否为空结点,如果为空结点就不需要更新_parent指针
if (subLR != nullptr)
{
subLR->_parent = parent;
}
//提前记录parent指向的结点的父结点指针
Node* pparent = parent->_parent;
subL->_right = parent;
parent->_parent = subL;
//我们换一个方法判断parent是否为根结点
//如果parent为根结点,就将subL设置为新的根结点
if (parent == _root)
{
_root = subL;
_root->_parent = nullptr;
}
else
{
//判断subL应该作为pparent指向结点的左孩子还是右孩子
if (pparent->_left == parent)
{
pparent->_left = subL;
}
else
{
pparent->_right = subL;
}
subL->_parent = pparent; //更新subL_parent指针
}
//更新subL和parent结点的平衡因子
subL->_bf = 0;
parent->_bf = 0;
}
3.5 什么时候调用左单旋和右单旋
我们已经实现了左单旋和右单旋的代码,那么我们应该在什么使用调用左单旋函数,什么时候调用右单旋函数呢?
当新节点插入较高右子树的右侧时,如下图所示的情况,我们此时调用左单旋。
当新节点插入较高左子树的左侧时,如下图所示的情况,我们此时调用右单旋。
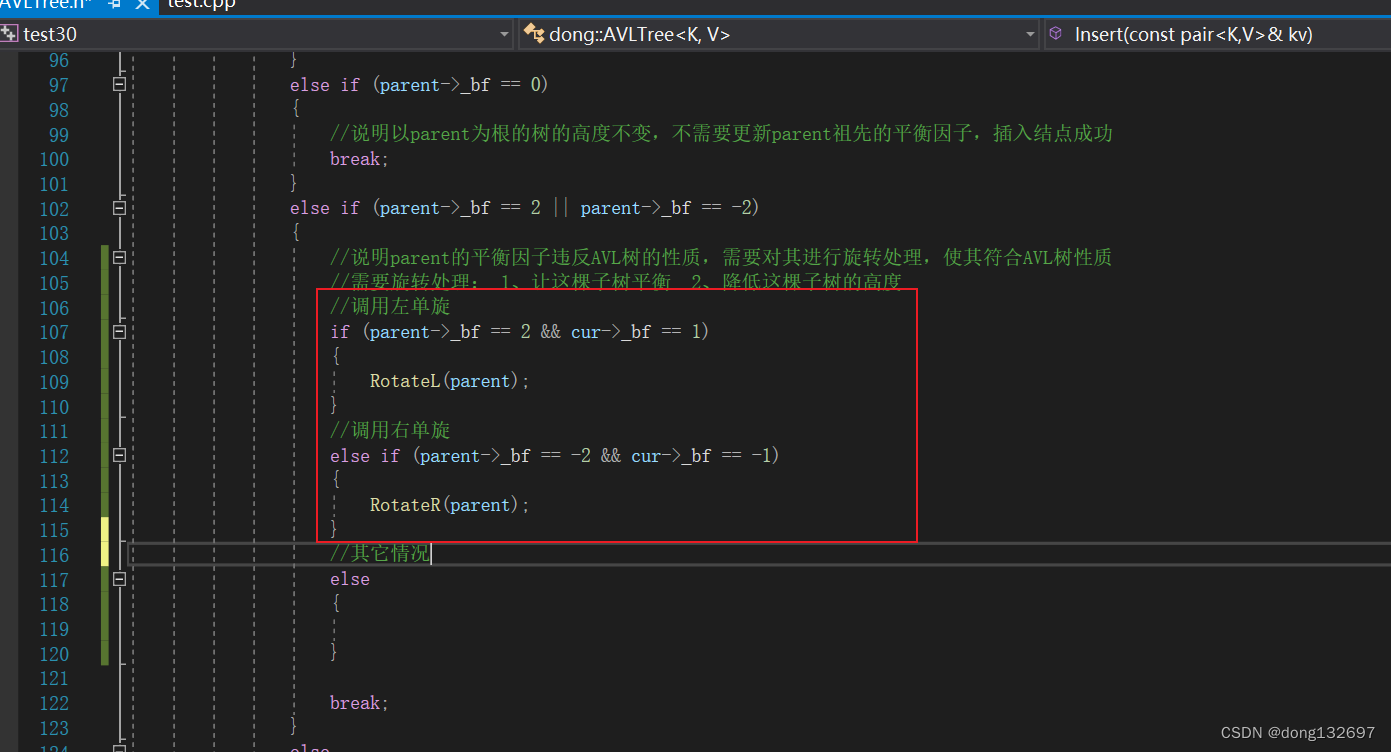
代码中实现判断
3.6 左右双旋
下面我们再来分析左右双旋的情况。前面我们分析了当新节点插入较高左子树的左侧时,即在a子树中插入新结点时就会引发下图中90结点的平衡因子不符合AVL树性质,此时需要将30结点进行右单旋。而当我们将新节点插入较高左子树的右侧时,此时将30结点进行右单旋后并不能将这棵树变为AVL树。
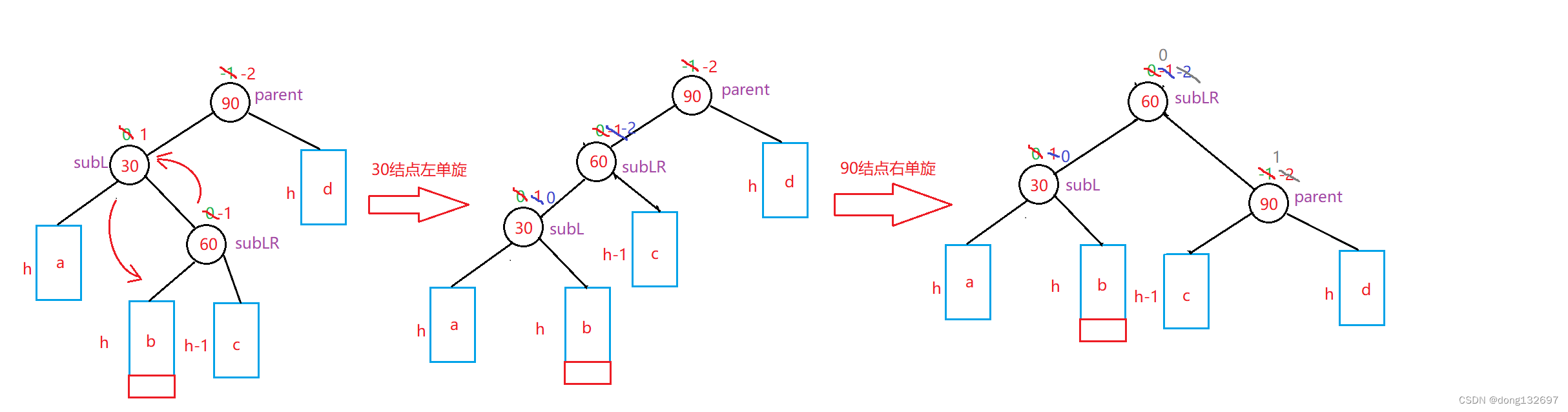
如果出现上面的情况时,我们就需要使用左右双旋操作来将以90结点为根结点的这棵二叉树变为AVL树,即我们先将30结点左单旋,然后再将90结点右单旋。下面的图中画了左右双旋的具体操作。
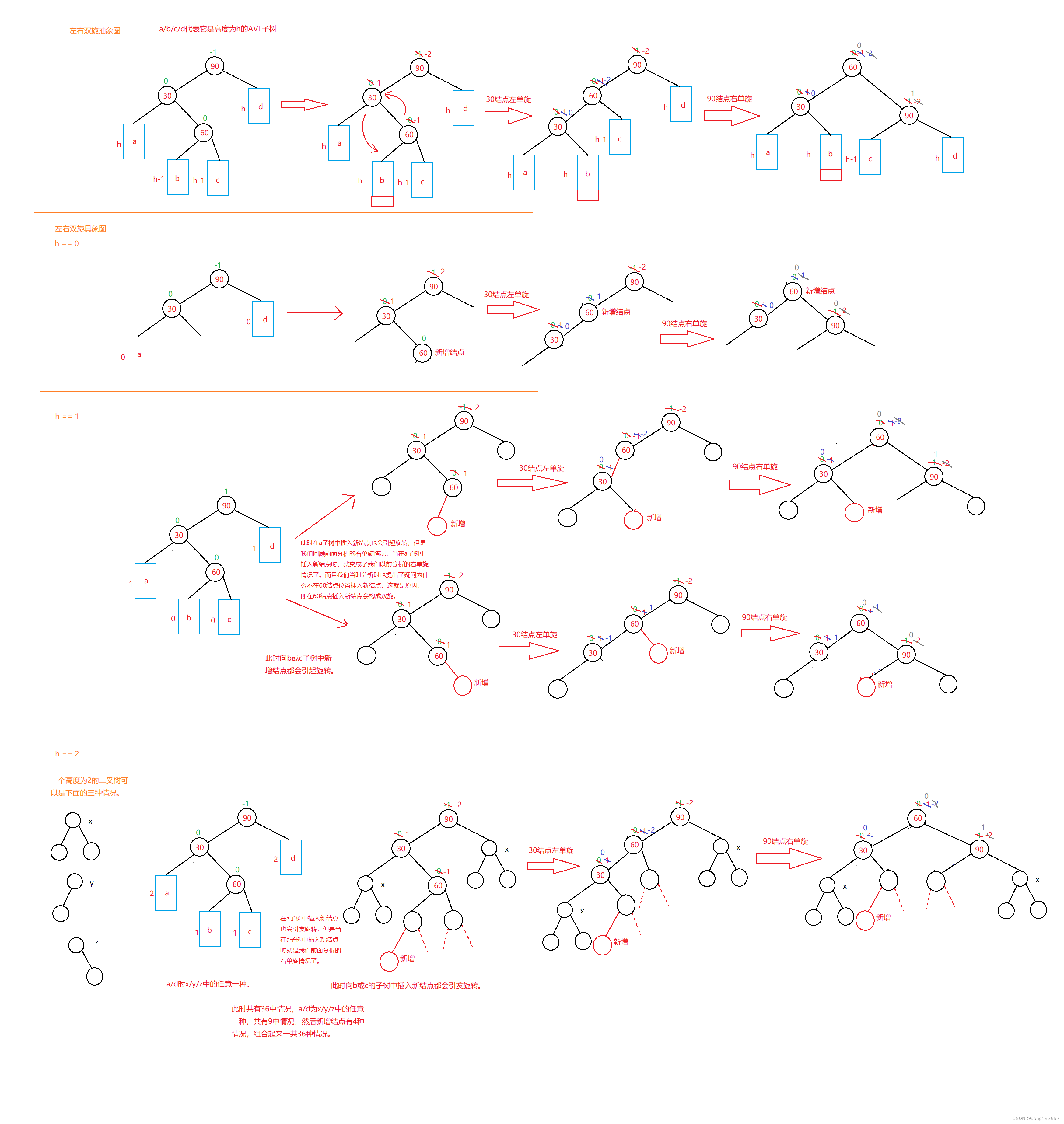
从上面的过程中我们可以看到左右双旋其实就是让60结点去上面做根结点,然后60结点的左右孩子分别给30结点和90结点。
3.7 左右双旋代码实现
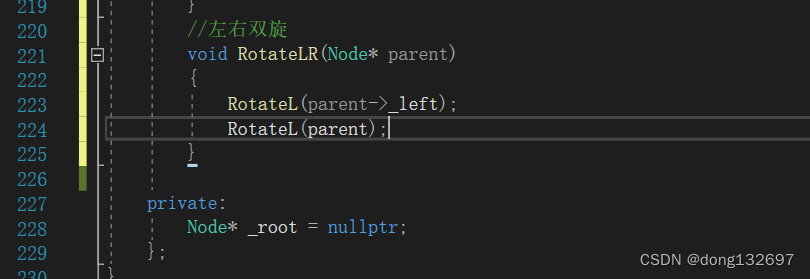
因为左右双旋分开的话其实就是第一步左单旋,第二步右单旋,所以我们可以复用前面写的左单旋和右单旋函数来实现左右双旋。
那么只需要这样就实现了左右双旋吗?
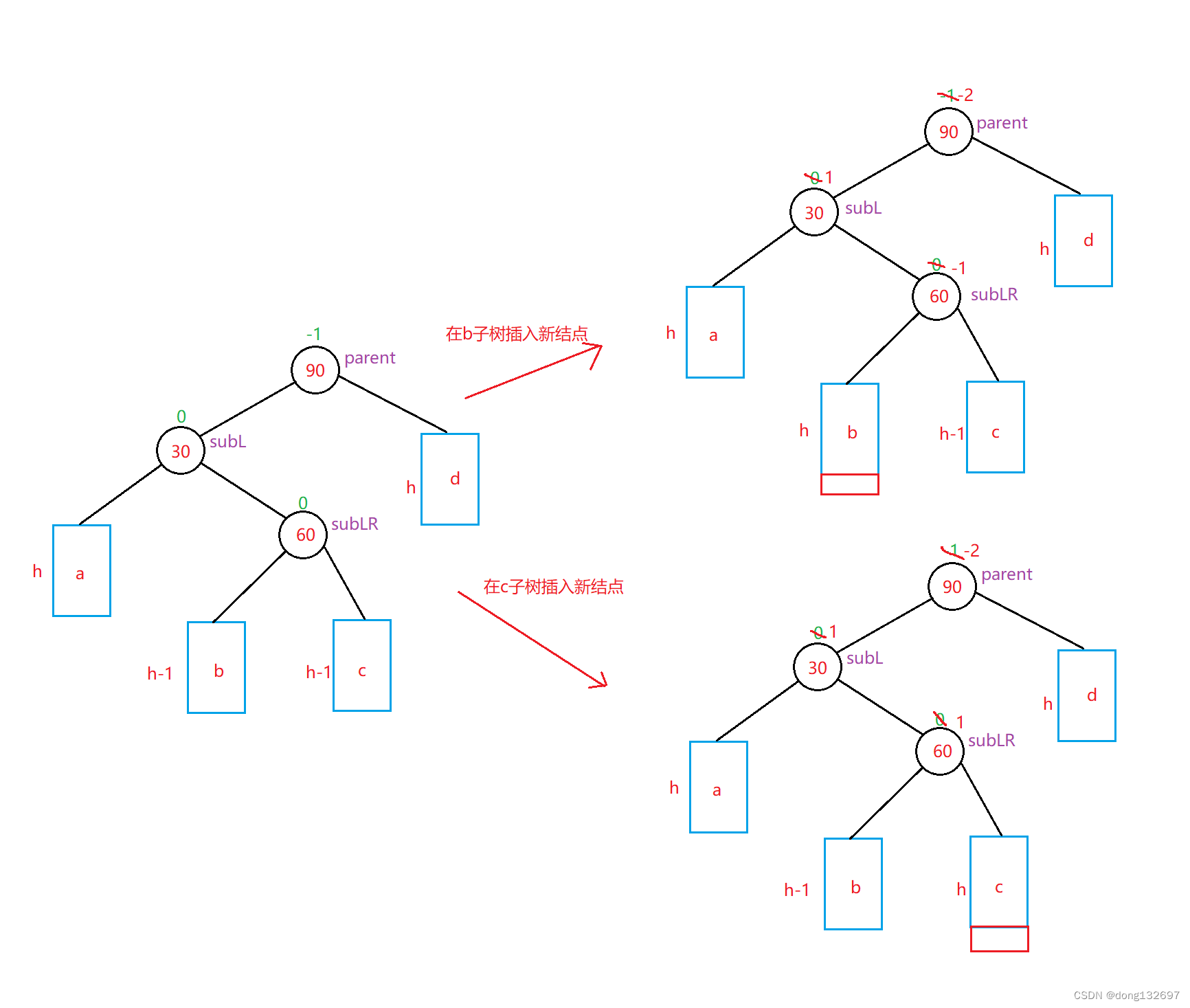
显然下面的代码不完整,因为我们通过上面的分析看到了左右双旋中最麻烦的其实是对结点的平衡因子进行更新,因为我们发现了这三个结点的平衡因子共出现了三种情况。
当在c子树中插入新结点时,此时subLR的平衡因子为1,左右双旋后三个结点的平衡因子分别为:
parent->_bf = 0
subL->_bf = -1
subLR->_bf = 0
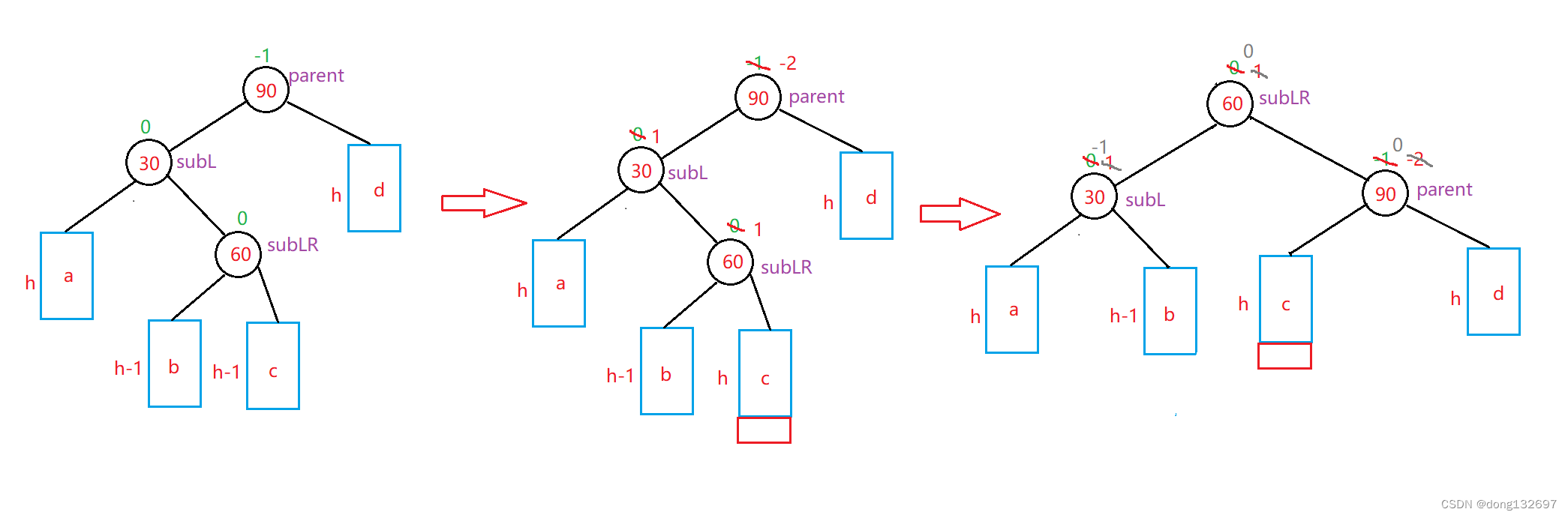
当在b子树中插入新结点时,此时subLR的平衡因子为-1,左右双旋后三个结点的平衡因子分别为:
parent->_bf = 1
subL->_bf = 0
subLR->_bf = 0
然后还有最后一种情况,就是h为0时,此时60结点就是新插入的结点,subLR的平衡因子为0。左右双旋后三个结点的平衡因子分别为:
parent->_bf = 0
subL->_bf = 0
subLR->_bf = 0
下面我们来写代码实现。
//左右双旋
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
//用来判断平衡因子为哪种情况
int bf = subLR->_bf;
RotateL(parent->_left);
RotateL(parent);
if (bf == 1)
{
parent->_bf = 0;
subL->_bf = -1;
subLR->_bf = 0
}
else if (bf == -1)
{
parent->_bf = 1;
subL->_bf = 0;
subLR->_bf = 0;
}
//我们不建议直接将bf==0的情况写在else里面,因为我们可以将else后使用一个断言,用来发现其它不可预知的情况
//即判断走到了else时,说明程序出现了大问题,断言可以更好的帮我们检查出问题。
else if (bf == 0)
{
parent->_bf = 0;
subL->_bf = 0;
subLR->_bf = 0;
}
else
{
assert(false);
}
}
3.8 右左双旋
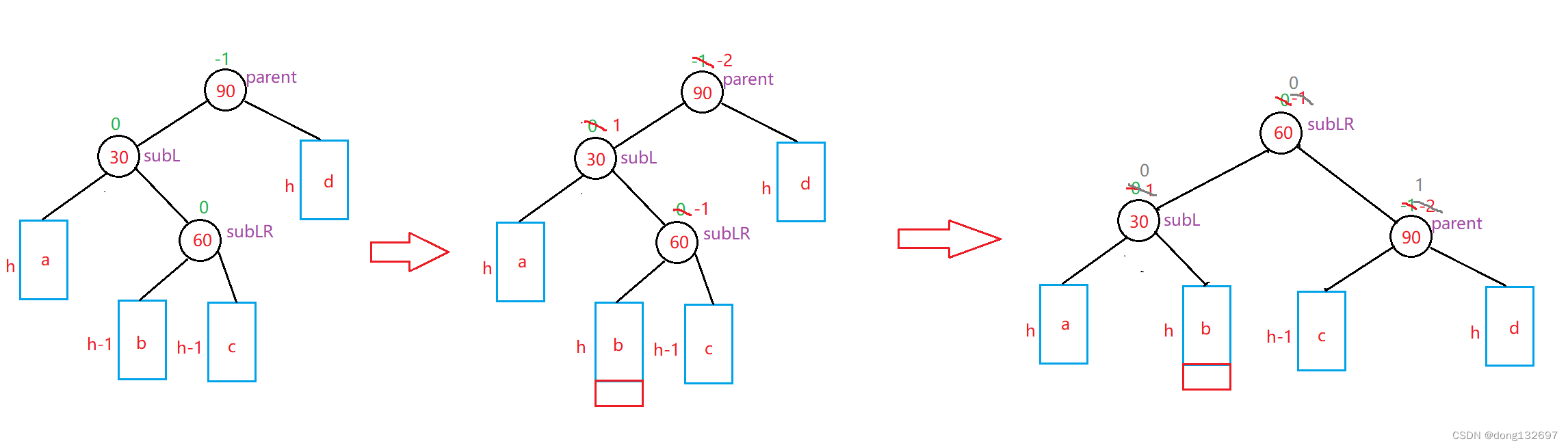
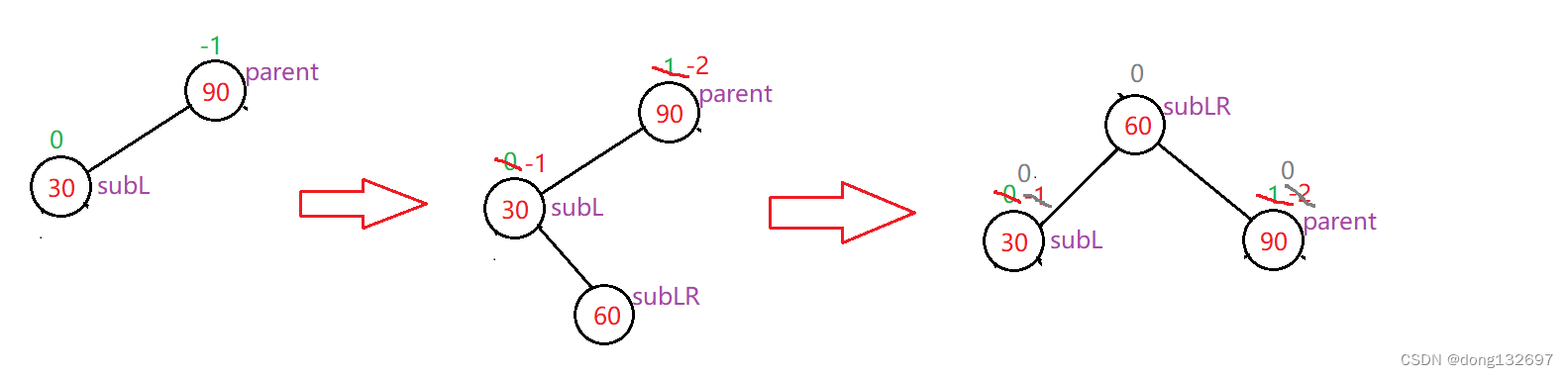
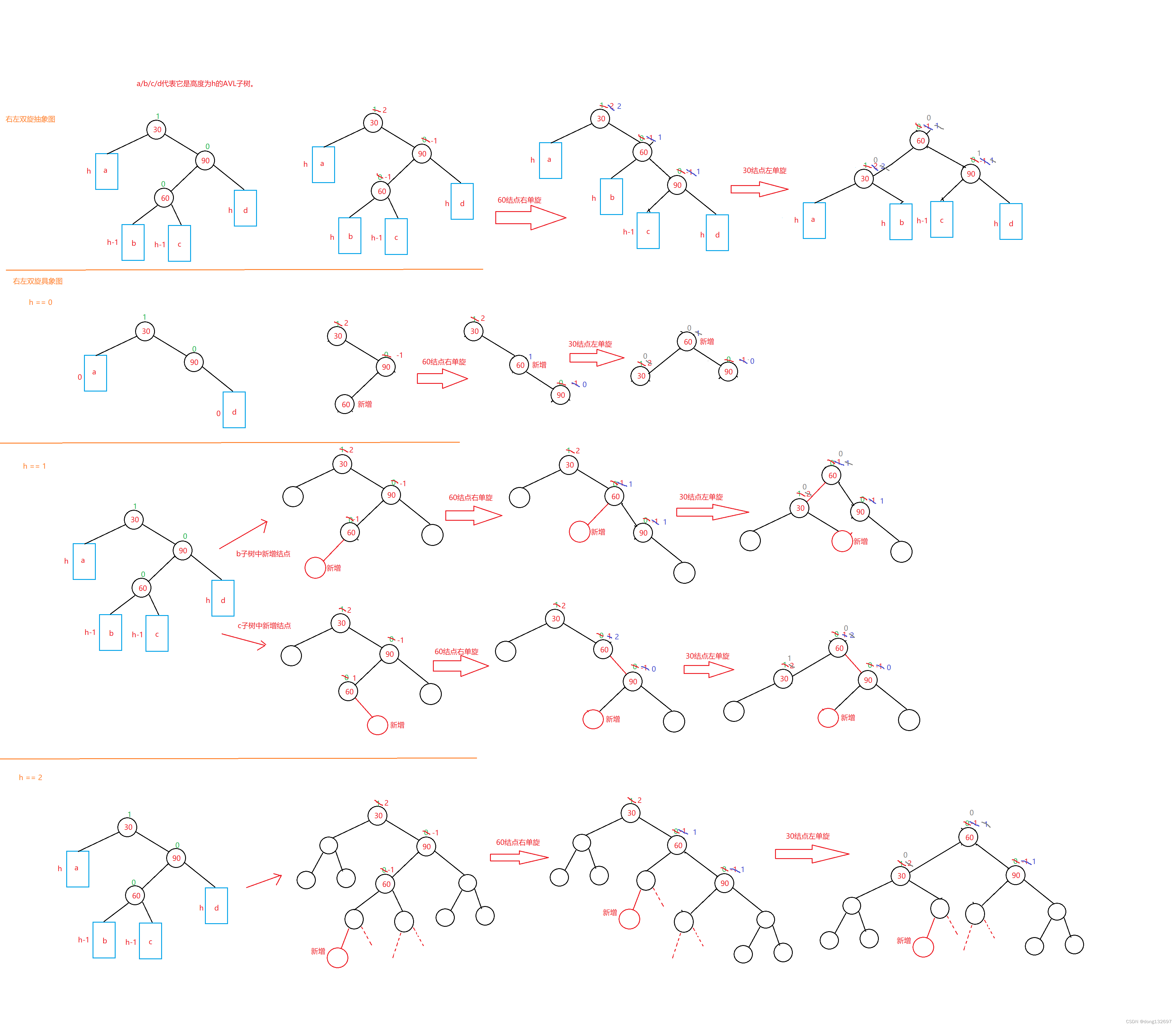
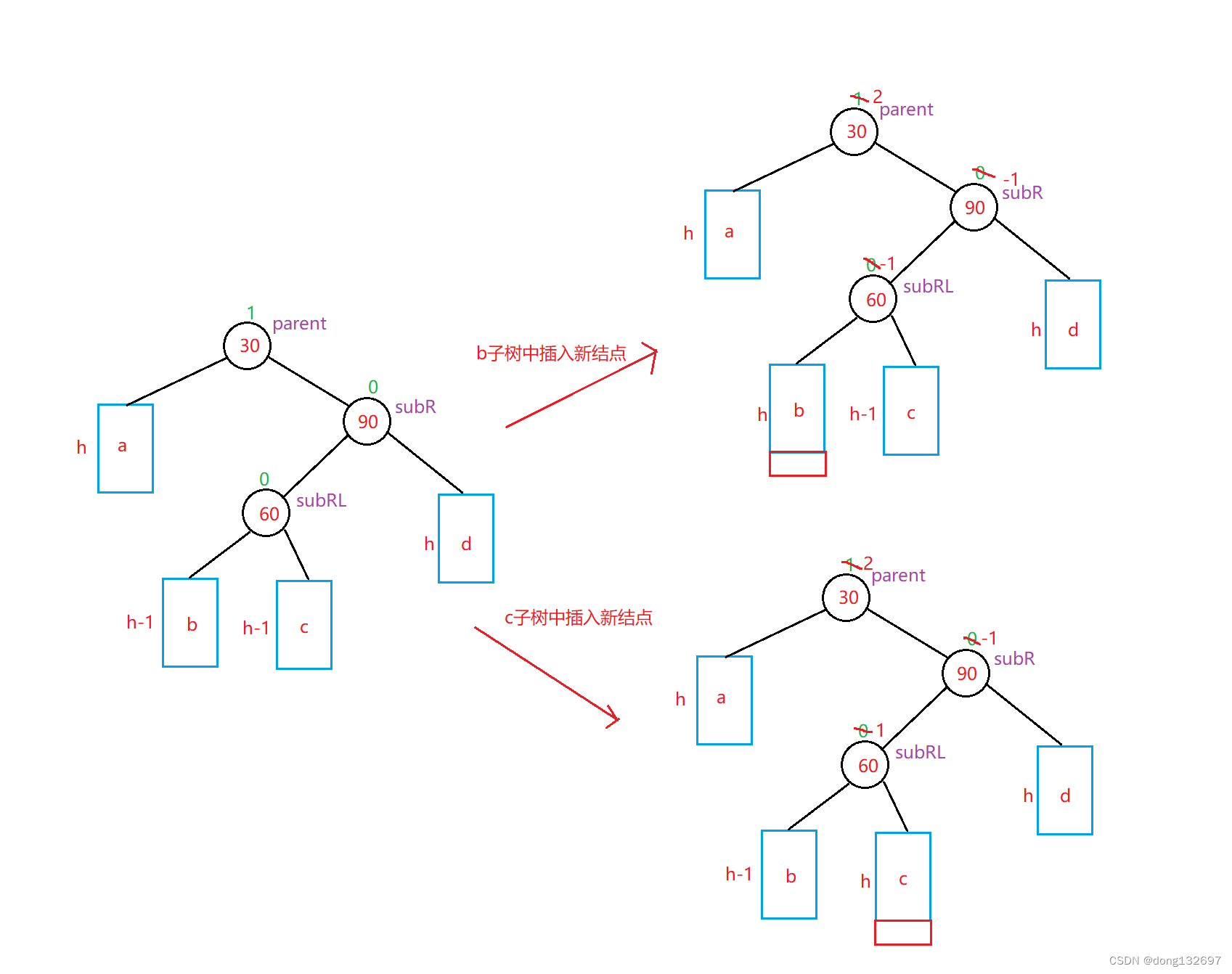
我们前面分析了当新结点插入较高右子树的右侧时,即在d子树中插入新结点时就会引发30结点的平衡因子不符合AVL树性质,此时30结点可以通过左单旋来进行调整。而当我们将新节点插入较高右子树的左侧时,即在b或c子树中插入新结点,此时左单旋并不能将这棵子树调整为AVL树,此时就需要进行右左双旋操作来调整AVL树。
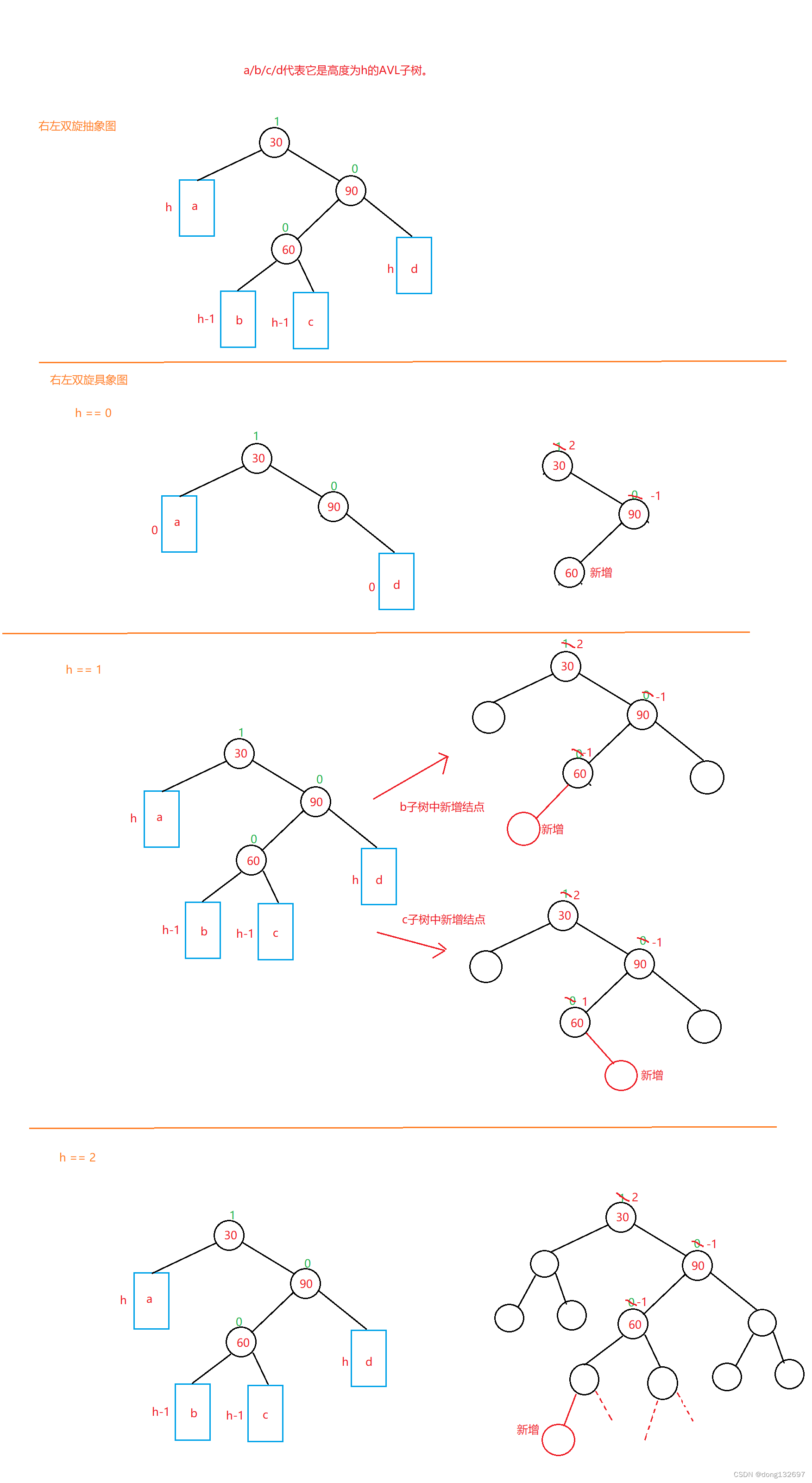
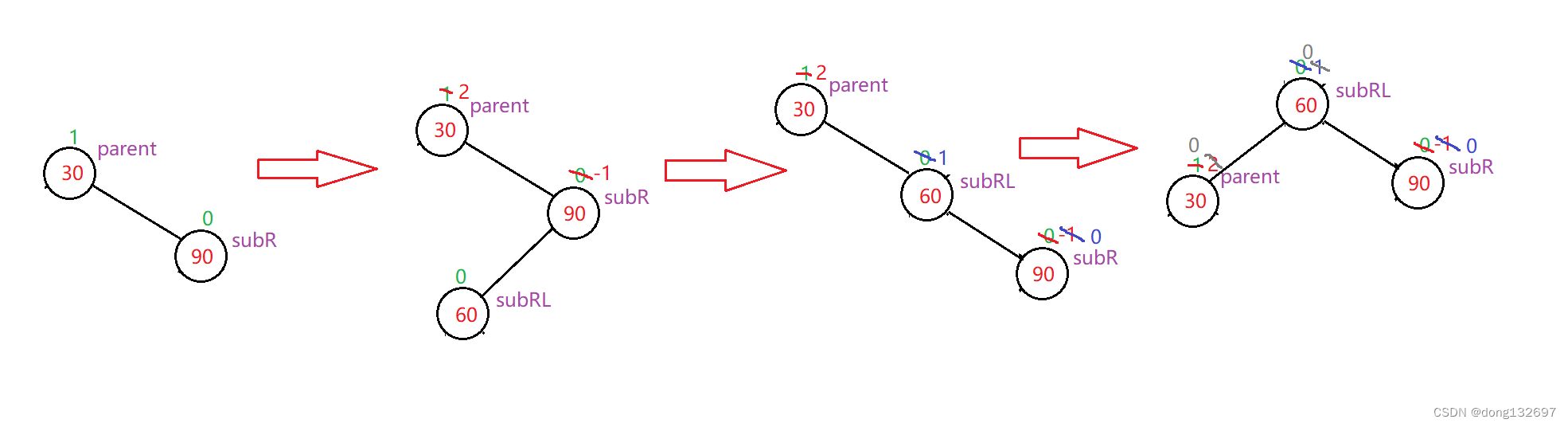
如果出现上面的情况时,我们就需要使用右左双旋操作来将以30结点为根结点的这棵二叉树变为AVL树,即我们先将90结点右单旋,然后再将30结点左单旋。下面的图中画了右左双旋的具体操作。(纠正:下图中的60结点右单旋都改为90结点右单旋)。
3.9 右左双旋代码实现
前面我们已经实现了左右双旋的代码,右左双旋的实现也是需要注意每个结点的平衡因子的更新。
当我们在b子树中插入新结点时,此时subRL的平衡因子为-1,左右双旋后三个结点的平衡因子分别为:
parent->_bf = 0
subR->_bf = 1
subRL->_bf = 0

当我们在c子树中插入新结点时,此时subRL的平衡因子为1,左右双旋后三个结点的平衡因子分别为:
parent->_bf = -1
subR->_bf = 0
subRL->_bf = 0
还有最后一种情况,就是h为0时,此时60结点就是新插入的结点,subRL的平衡因子为0。左右双旋后三个结点的平衡因子分别为:
parent->_bf = 0
subR->_bf = 0
subRL->_bf = 0
下面我们使用代码来实现右左双旋。
//右左双旋
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
int bf = subRL->_bf;
RotateR(parent->_right);
RotateL(parent);
if (bf == 1)
{
parent->_bf = -1;
subR->_bf = 0;
subRL->_bf = 0;
}
else if (bf == -1)
{
parent->_bf = 0;
subR->_bf = 1;
subRL->_bf = 0;
}
else if (bf == 0)
{
parent->_bf = 0;
subR->_bf = 0;
subRL->_bf = 0;
}
else
{
assert(false);
}
}
3.10 什么时候调用左右双旋和右左双旋
我们实现了左右双旋和右左双旋的代码后,下面我们就要分析在什么情况下会调用这两个函数了。
当新节点插入较高左子树的右侧时,如下图所示的情况,我们使用左右双旋,即先让30结点进行左单旋,然后让90结点进行右单旋。
当新节点插入较高右子树的左侧时,如下图所示的情况,我们使用右左双旋,即先让90结点进行右单旋,然后让30结点进行左单旋。
代码中实现判断
4、测试
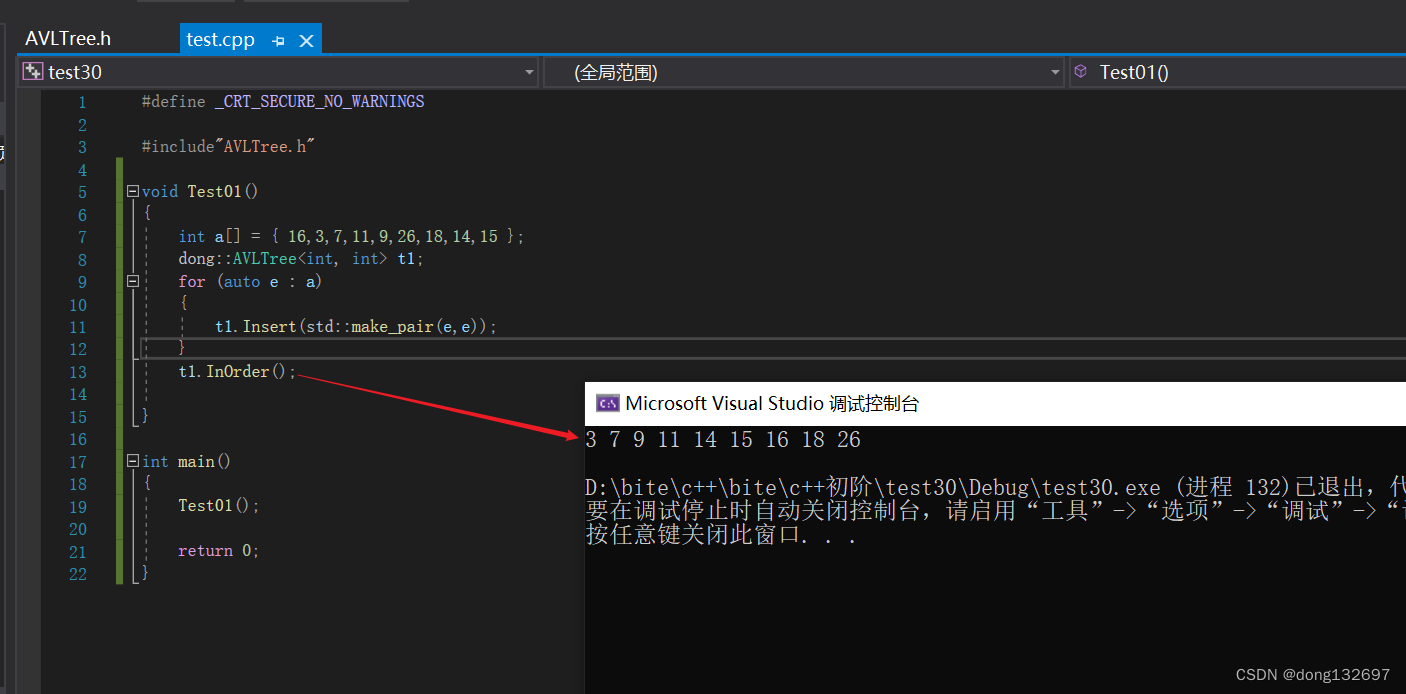
上面我们就实现了一个AVL树,下面我们来进行测试。
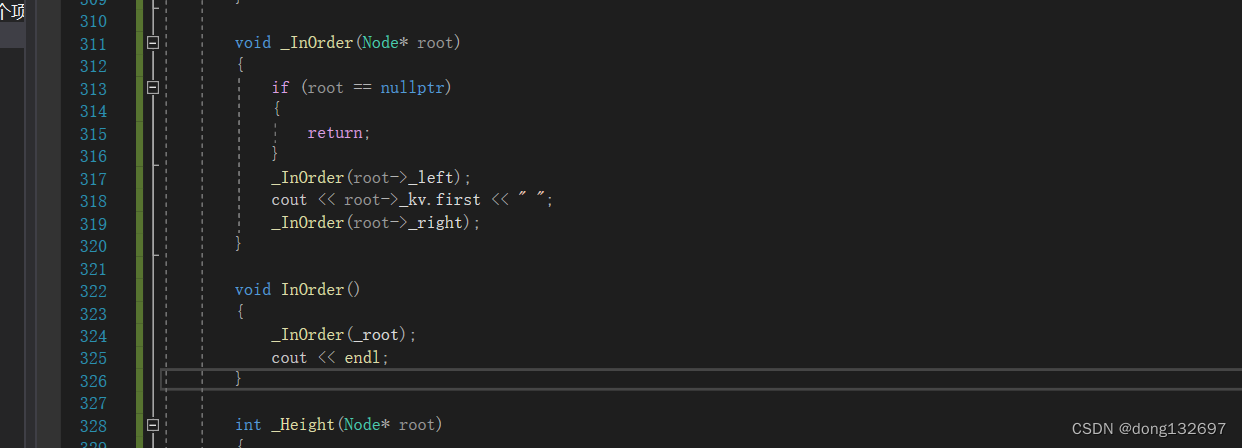
我们知道AVL树是一棵平衡二叉搜索树,下面我们写一个中序遍历,然后我们创建一个AVL树,并且插入数据,然后中序遍历这棵AVL树,看输出的结果是否为升序。
我们看到输出的结果和我们预期的一样为升序,但是这样就可以判断我们实现的AVL树没有问题了吗?
这样的测试肯定是不够的,而且AVL树是一棵平衡二叉搜索树,这个结果只能说明我们实现了一棵二叉搜索树,这个二叉搜索树是否为平衡的,我们不能得出结论。
所以我们需要写一个方法来判断这棵二叉搜索树是否为一棵平衡树。我们知道平衡二叉搜索树的每个结点的平衡因子的绝对值不大于1,那么如果我们直接检查每个结点的平衡因子是否有绝对值大于1的,这个方法可以不可以呢?这样做也是不严谨的,因为平衡因子是我们自己维护并且更新的,如果我们的逻辑错误,那么可能造成平衡因子正确,但是二叉搜索树不平衡的情况发生。所以我们还是需要通过一一检查每个结点的左右子树的高度差是否大于1这样的方法来判断。
我们先写一个函数来求一棵树的高度。
然后我们再写一个函数递归判断每一个结点是否都满足左右子树高度差小于2,如果每一个结点都满足那么这棵树就是平衡二叉搜索树了。
但是有时候可能我们的逻辑错误,使AVL树没问题,但是平衡因子更新时出现了问题,虽然此时还是一棵AVL树,但是因为平衡因子不对,就会导致以后再使用时出现问题。所以我们可以在判断每个结点是否都满足平衡树的同时也判断每个结点的平衡因子是否都正确。这样我们的判断才严谨。并且这样处理也方便以后出问题了调试时我们可以更快的定位到错误。

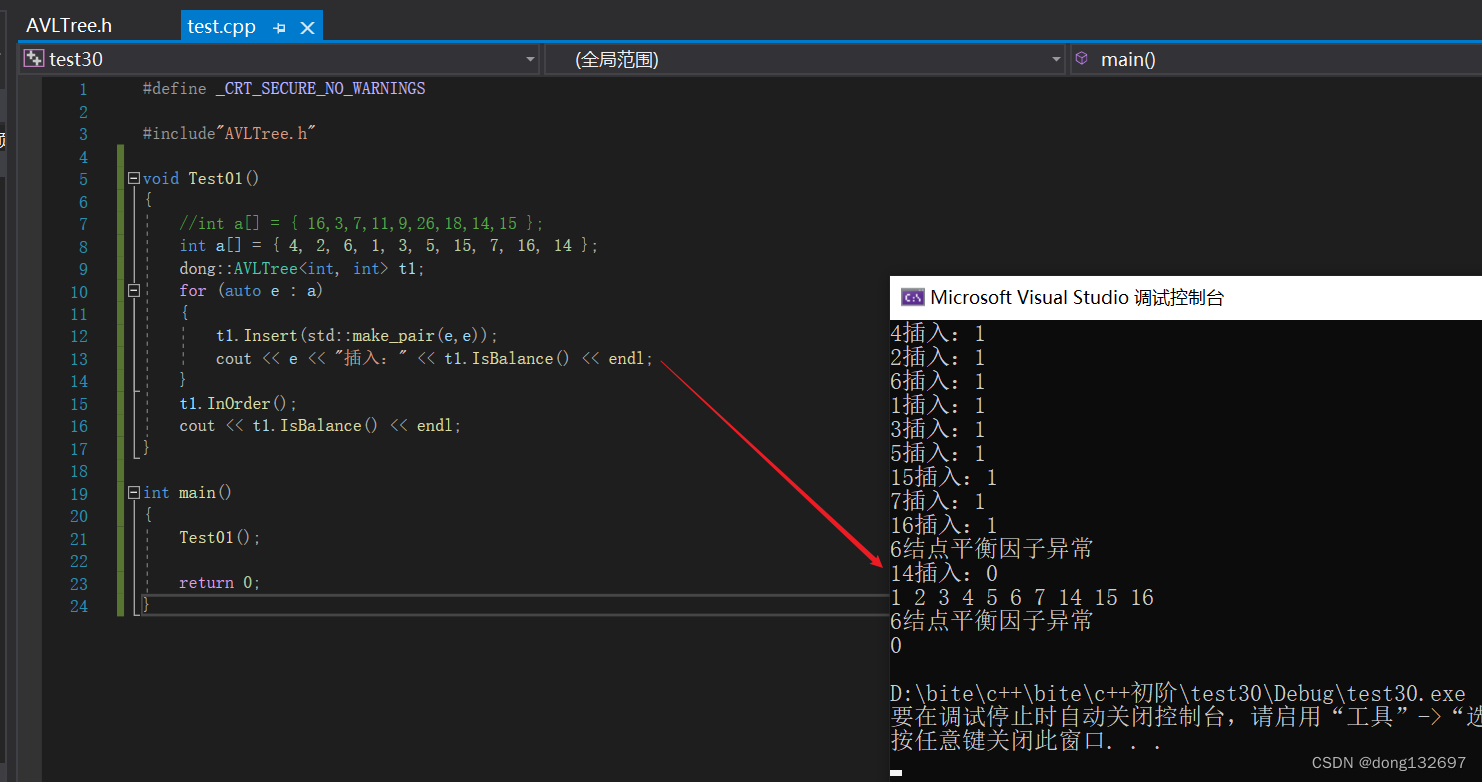
下面我们将右左双旋中的平衡因子更新代码注释掉,我们可以看到结果中显示6结点的平衡因子异常,并且此时二叉搜索树也不是平衡二叉搜索树了。
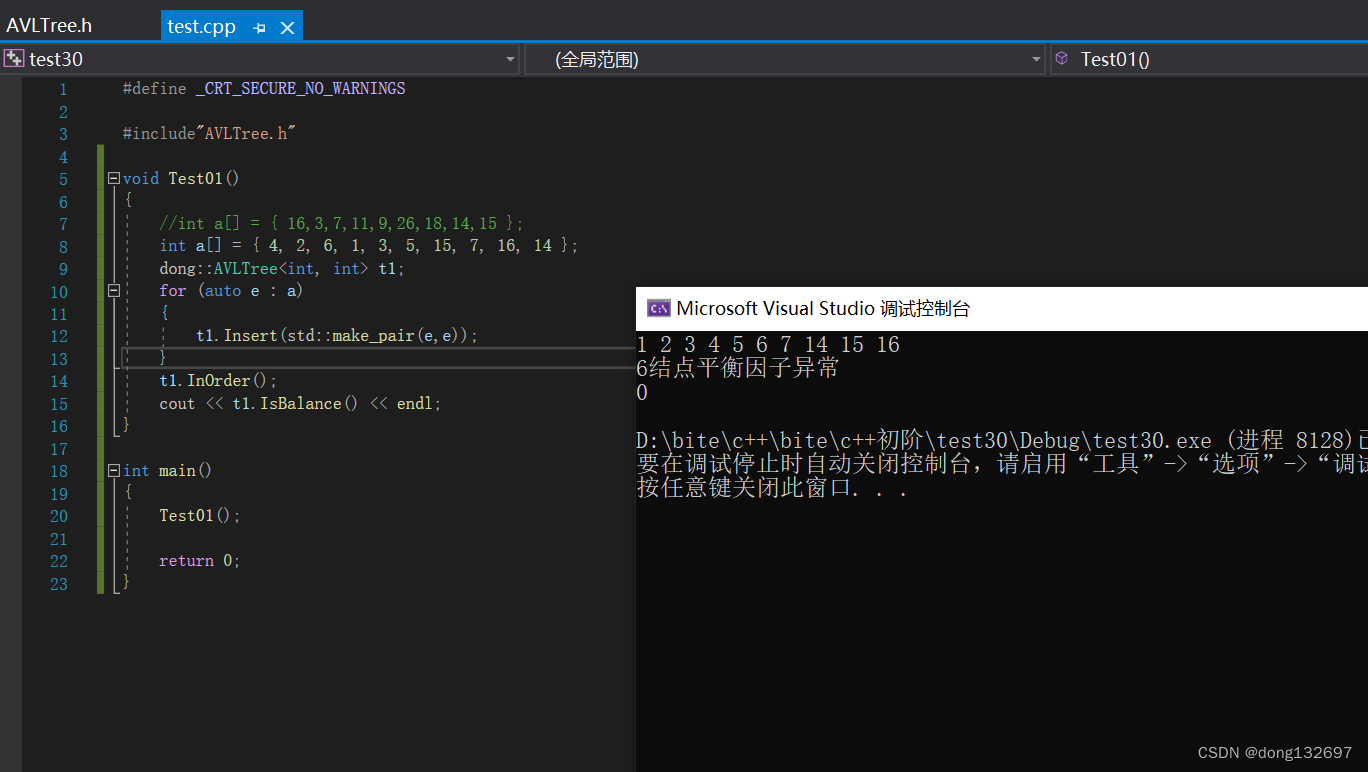
6结点出现错误并不一定就是插入6结点时引起的错误,此时我们需要一个结点一个结点的去排查,但是这样排查也会很慢,此时我们可以每插入一个结点就使用IsBalance函数判断当前的二叉搜索树是否为平衡二叉搜索树。这样我们就很快的看到了是14结点插入时出现了问题。
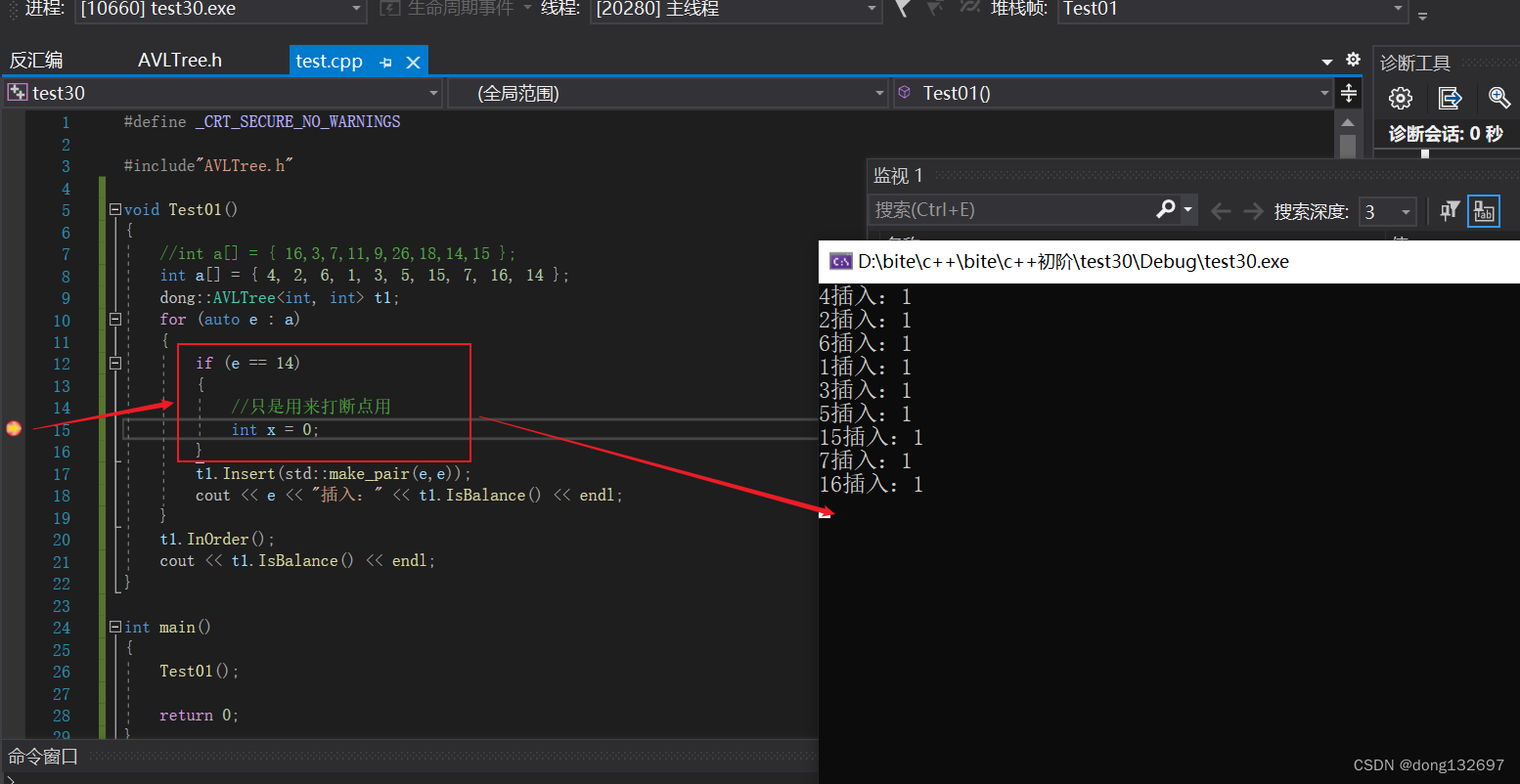
此时我们就可以自己手动写一个判断条件,然后在判断条件里面打一个断点,这样来快速的还原错误bug现场。这样我们的调试效率就可以加快了。
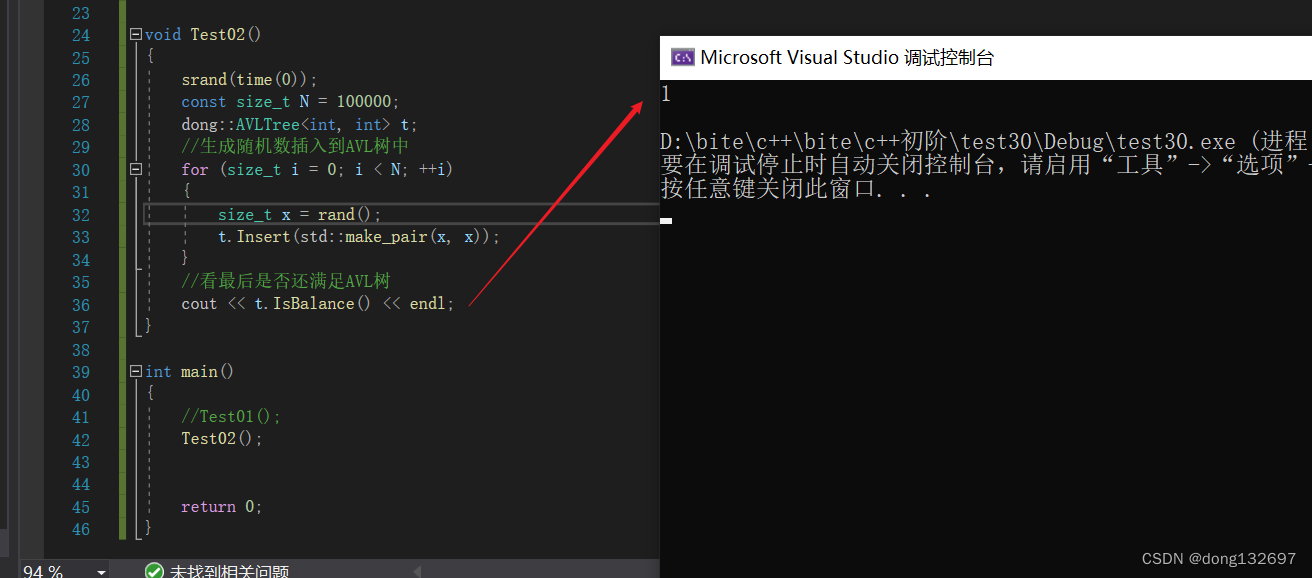
下面我们将右左双旋更新平衡因子的代码恢复,然后我们写一个生成随机数的代码来再次测试我们实现的AVL是否还有问题。这样多执行几次,就基本将所有的场景都测试到了。
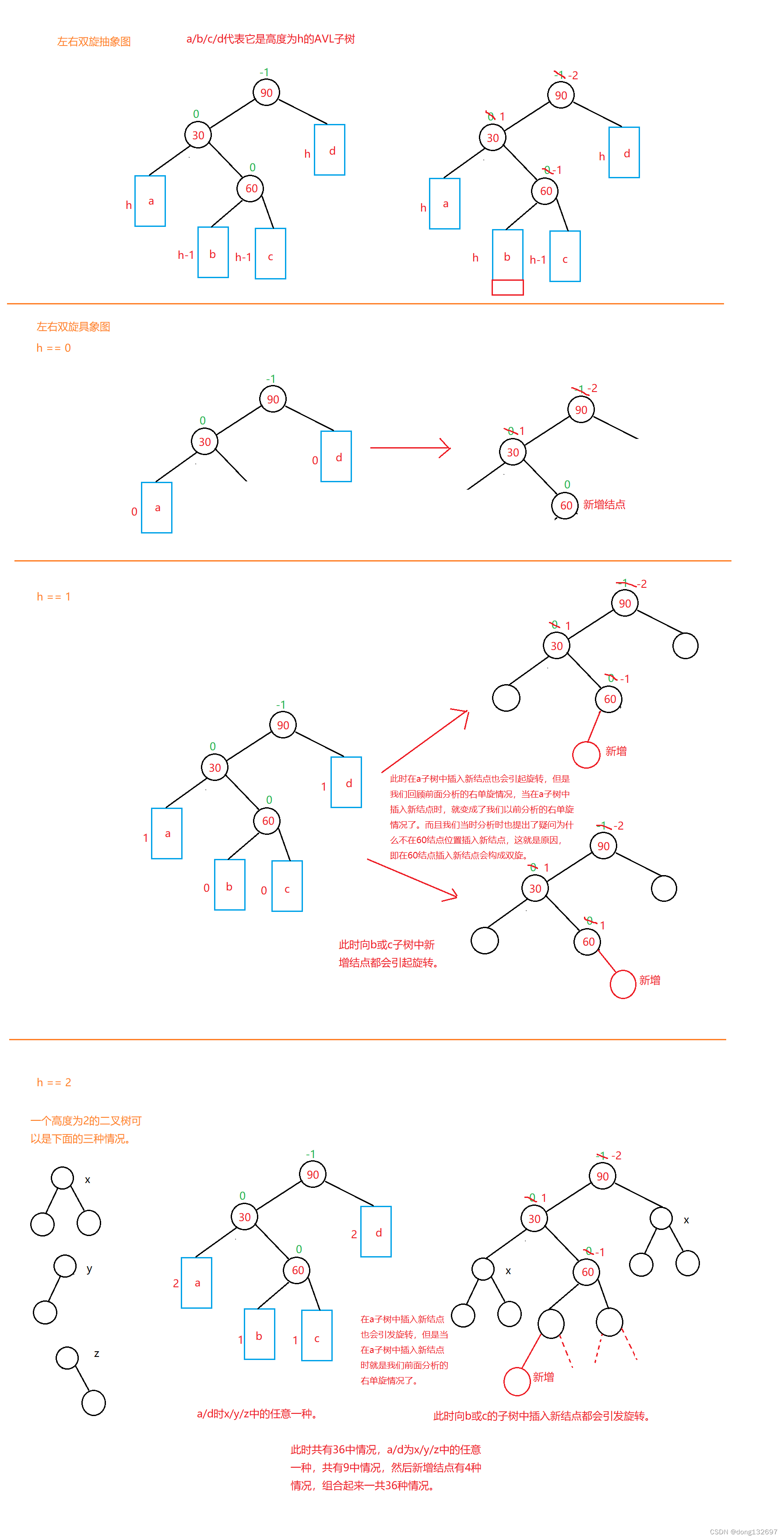
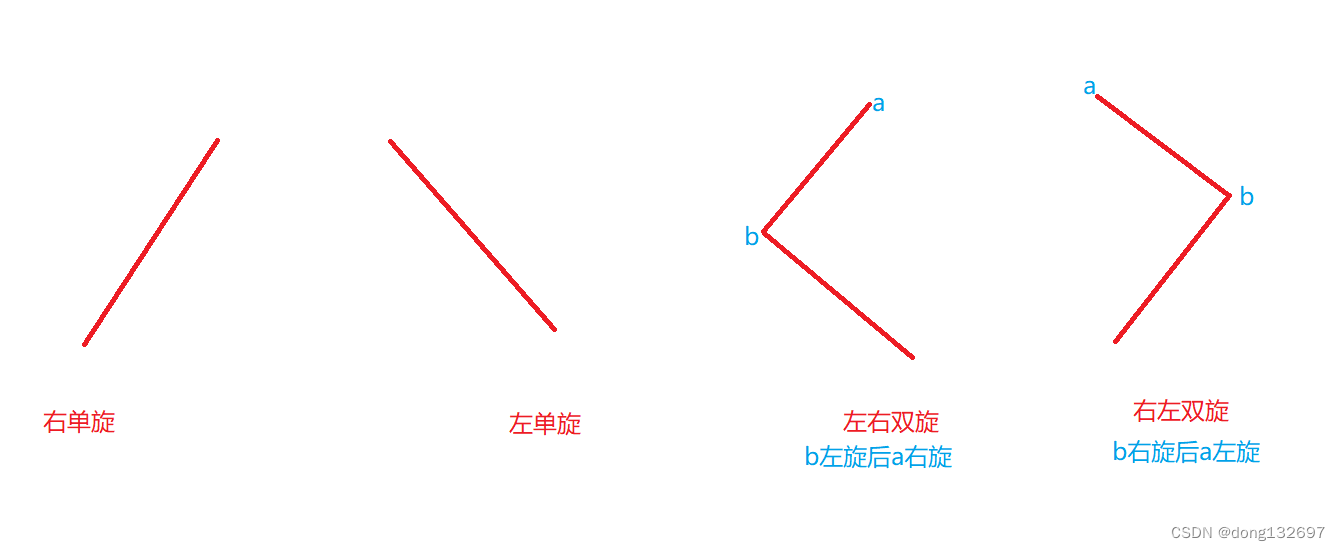
5、总结
AVL树插入结点引起的这棵树不平衡情况可以通过下面的图来记忆。
6、AVL树的性能
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度,即 l o g 2 ( N ) log_2 (N) log2(N)。但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合。
7、AVL树的结点删除
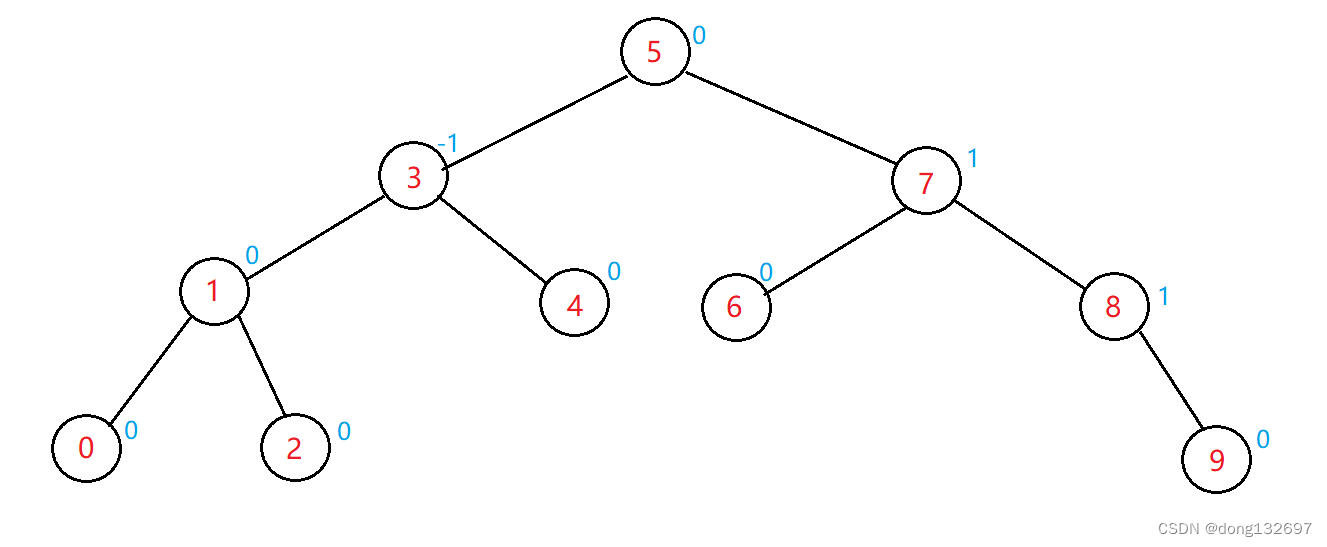
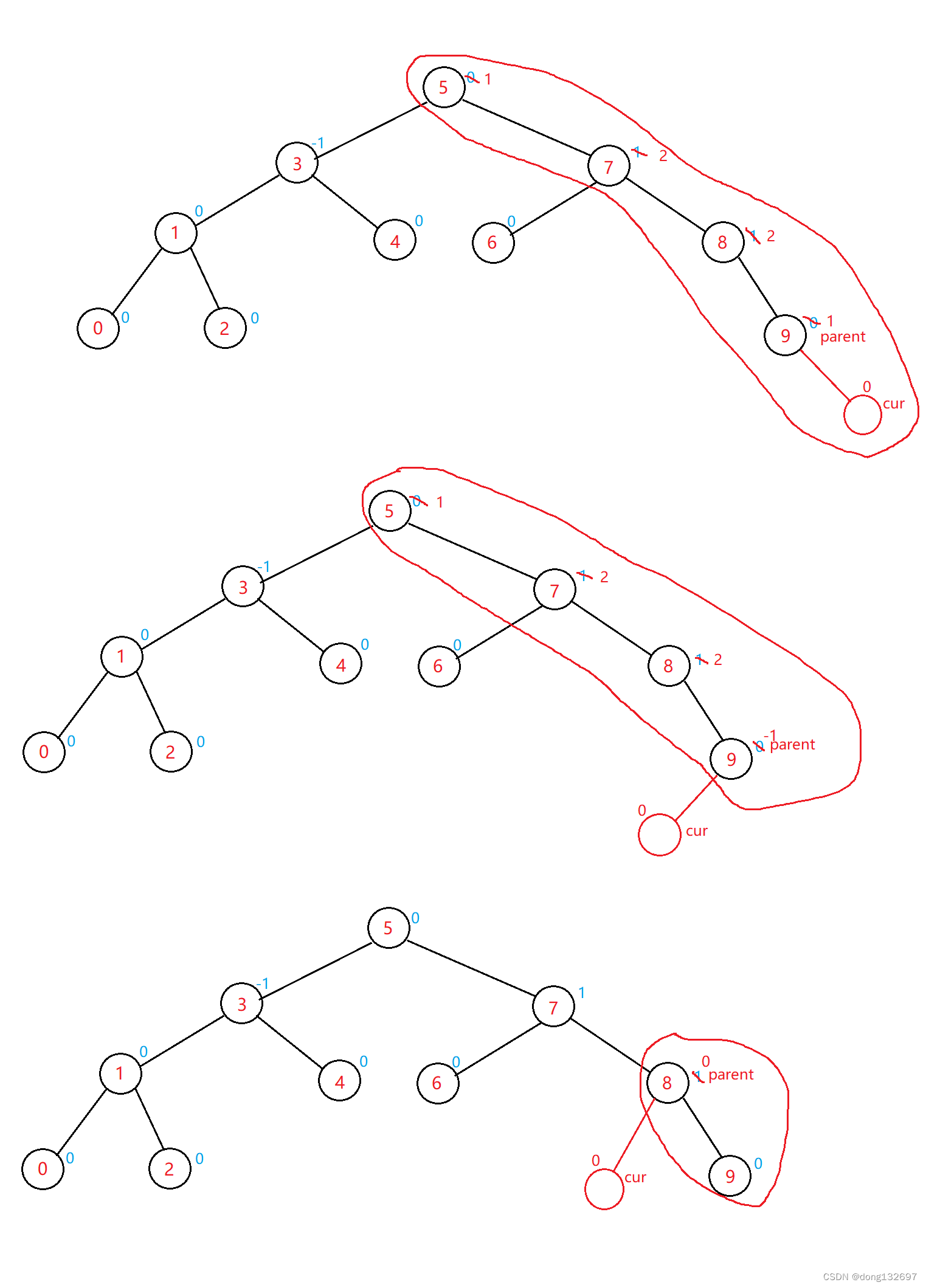
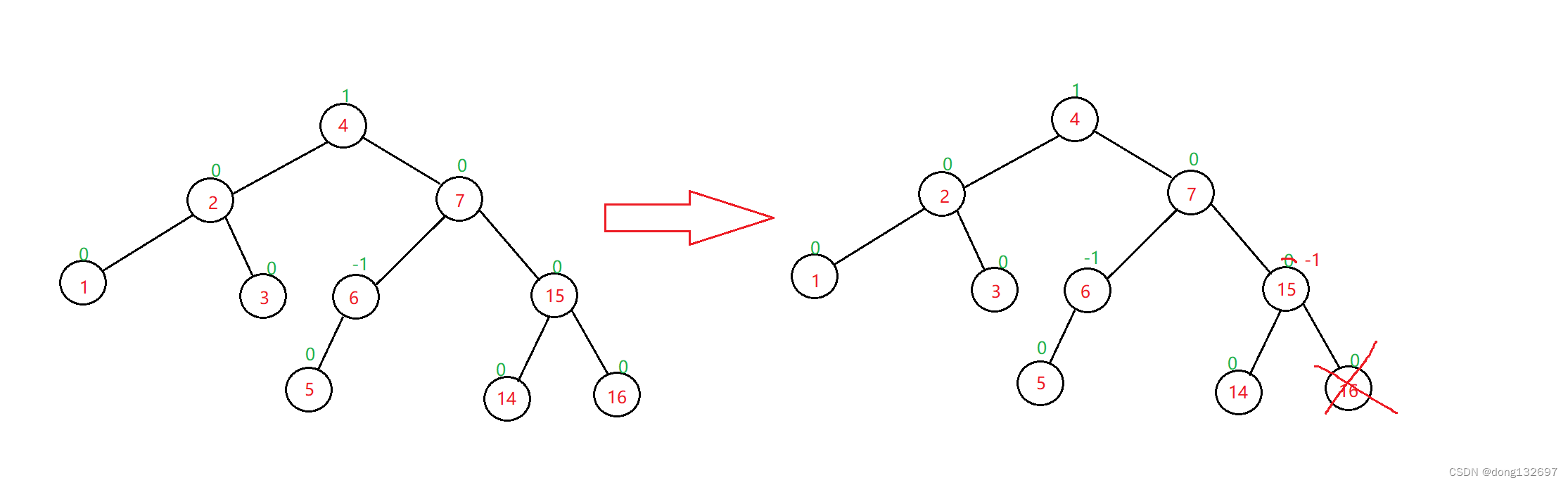
AVL树的结点删除后也可能会使这棵树变得不平衡,此时也需要通过旋转操作来重新使这棵树满足平衡二叉搜索树的性质。
与AVL树插入结点不同的是,AVL树中删除结点后,如果父结点平衡因子更新为1或-1时,此时不需要继续向上更新祖先结点的平衡因子,直接就是成功删除结点了。因为说明父结点之前的平衡因子为0,此时删除了结点后子树高度没有变化,就不会使AVL树变得不平衡了。
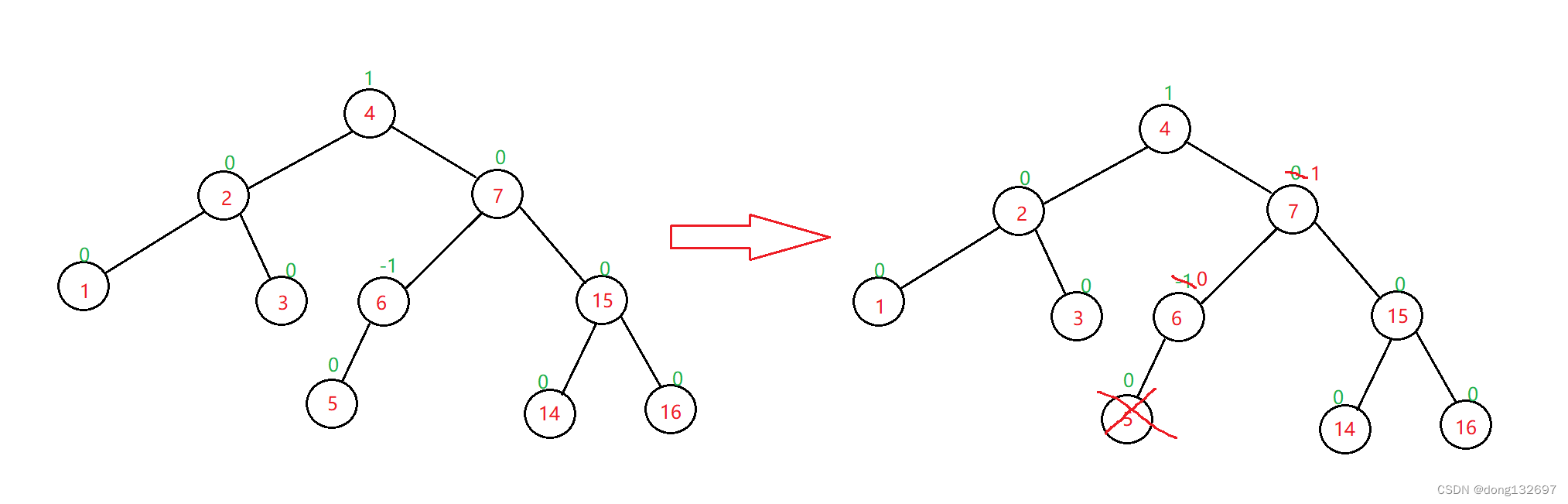
如果删除结点后,该结点的父结点平衡因子更新为0,那么就需要继续向上更新祖先结点的平衡因子,因为说明原来父结点的平衡因子为1或-1,删除结点后父结点的平衡因子才变为0。子树高度发生变化了。并且在向上继续更新祖先结点的平衡因子的时候,如果祖先结点的平衡因子不满足AVL树的要求,那么就需要通过旋转操作来将这棵树修正为平衡二叉搜索树。
8、代码
#pragma once
#include<iostream>
#include<map>
#include<utility>
#include<assert.h>
#include<utility>
#include<time.h>
using std::pair;
using std::cout;
using std::endl;
namespace dong
{
template<class K, class V>
struct AVLTreeNode
{
AVLTreeNode<K, V>* _left; //当前结点左孩子
AVLTreeNode<K, V>* _right; //当前结点右孩子
AVLTreeNode<K, V>* _parent; //当前结点父结点
pair<K, V> _kv;
int _bf; //平衡因子
AVLTreeNode(const pair<K, V>& kv)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _kv(kv)
, _bf(0)
{
}
};
template<class K, class V>
class AVLTree
{
typedef AVLTreeNode<K, V> Node;
public:
bool Insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
return true;
}
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
//找到结点要插入的位置,将结点链接到二叉搜索树中
cur = new Node(kv);
if (parent->_kv.first > kv.first)
{
parent->_left = cur;
}
else
{
parent->_right = cur;
}
//将父结点也改变
cur->_parent = parent;
//更新平衡因子
while (parent)
{
//先判断cur插入到parent的左边或右边,然后更新parent的平衡因子
if (cur == parent->_right)
{
parent->_bf++;
}
else
{
parent->_bf--;
}
//判断更新后parent的平衡因子为多少,是否还需要继续向上更新祖先的平衡因子
if (parent->_bf == 1 || parent->_bf == -1)
{
//说明以parent为根的树的高度改变,需要更新parent祖先的平衡因子
parent = parent->_parent;
cur = cur->_parent;
}
else if (parent->_bf == 0)
{
//说明以parent为根的树的高度不变,不需要更新parent祖先的平衡因子,插入结点成功
break;
}
else if (parent->_bf == 2 || parent->_bf == -2)
{
//说明parent的平衡因子违反AVL树的性质,需要对其进行旋转处理,使其符合AVL树性质
//需要旋转处理: 1、让这棵子树平衡 2、降低这棵子树的高度
//调用左单旋
if (parent->_bf == 2 && cur->_bf == 1)
{
RotateL(parent);
}
//调用右单旋
else if (parent->_bf == -2 && cur->_bf == -1)
{
RotateR(parent);
}
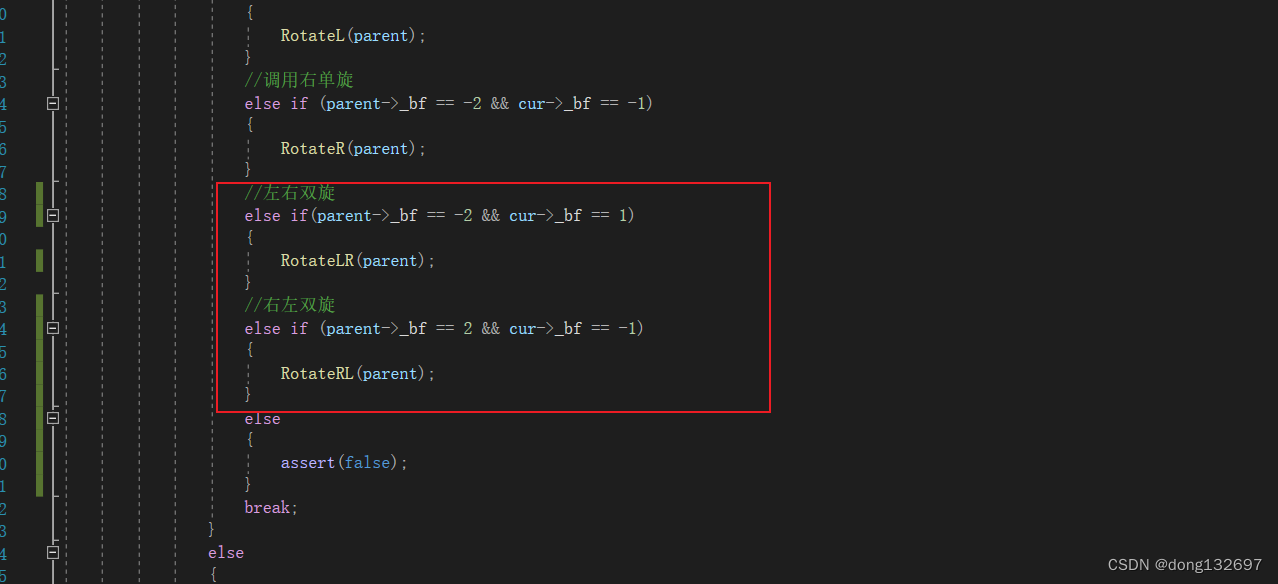
//左右双旋
else if(parent->_bf == -2 && cur->_bf == 1)
{
RotateLR(parent);
}
//右左双旋
else if (parent->_bf == 2 && cur->_bf == -1)
{
RotateRL(parent);
}
else
{
assert(false);
}
break;
}
else
{
//如果不是上面的任何一种情况,也报错误。
assert(false);
}
}
return true;
}
void InOrder()
{
_InOrder(_root);
cout << endl;
}
bool IsBalance()
{
return _IsBalance(_root);
}
protected:
//左单旋
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
//如果subRL不为nullptr,才将subRL指向的结点的_parent指针更新
if (subRL != nullptr)
{
subRL->_parent = parent;
}
//提前记录parent指向结点的父结点的指针。
Node* pparent = parent->_parent;
subR->_left = parent;
parent->_parent = subR;
//判断parent是否为根结点,因为只有根结点没有父亲
if (pparent == nullptr)
{
//如果parent为根结点,那么左单旋后subR为新的根结点
_root = subR;
_root->_parent = nullptr;
}
else
{
//parent不为根结点,那么就将subR更新为pparent的孩子
//判断将subR为pparent的左孩子还是右孩子
if (pparent->_left == parent)
{
pparent->_left = subR;
}
else
{
pparent->_right = subR;
}
subR->_parent = pparent;
}
//更新结点平衡因子
parent->_bf = 0;
subR->_bf = 0;
}
//右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
//判断subLR是否为空结点,如果为空结点就不需要更新_parent指针
if (subLR != nullptr)
{
subLR->_parent = parent;
}
//提前记录parent指向的结点的父结点指针
Node* pparent = parent->_parent;
subL->_right = parent;
parent->_parent = subL;
//我们换一个方法判断parent是否为根结点
//如果parent为根结点,就将subL设置为新的根结点
if (parent == _root)
{
_root = subL;
_root->_parent = nullptr;
}
else
{
//判断subL应该作为pparent指向结点的左孩子还是右孩子
if (pparent->_left == parent)
{
pparent->_left = subL;
}
else
{
pparent->_right = subL;
}
subL->_parent = pparent; //更新subL_parent指针
}
//更新subL和parent结点的平衡因子
subL->_bf = 0;
parent->_bf = 0;
}
//左右双旋
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
//用来判断平衡因子为哪种情况
int bf = subLR->_bf;
RotateL(parent->_left);
RotateR(parent);
//更新平衡因子
if (bf == 1)
{
parent->_bf = 0;
subL->_bf = -1;
subLR->_bf = 0;
}
else if (bf == -1)
{
parent->_bf = 1;
subL->_bf = 0;
subLR->_bf = 0;
}
//我们不建议直接将bf==0的情况写在else里面,因为我们可以将else后使用一个断言,用来发现其它不可预知的情况
//即判断走到了else时,说明程序出现了大问题,断言可以更好的帮我们检查出问题。
else if (bf == 0)
{
parent->_bf = 0;
subL->_bf = 0;
subLR->_bf = 0;
}
else
{
assert(false);
}
}
//右左双旋
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
int bf = subRL->_bf;
RotateR(parent->_right);
RotateL(parent);
//更新平衡因子
if (bf == 1)
{
parent->_bf = -1;
subR->_bf = 0;
subRL->_bf = 0;
}
else if (bf == -1)
{
parent->_bf = 0;
subR->_bf = 1;
subRL->_bf = 0;
}
else if (bf == 0)
{
parent->_bf = 0;
subR->_bf = 0;
subRL->_bf = 0;
}
else
{
assert(false);
}
}
void _InOrder(Node* root)
{
if (root == nullptr)
{
return;
}
_InOrder(root->_left);
cout << root->_kv.first << " ";
_InOrder(root->_right);
}
//得到一棵树的高度
int _Height(Node* root)
{
if (root == nullptr)
{
return 0;
}
int leftH = _Height(root->_left);
int rightH = _Height(root->_right);
return leftH > rightH ? leftH + 1 : rightH + 1;
}
bool _IsBalance(Node* root)
{
//如果是空树则也为平衡树
if (root == nullptr)
{
return true;
}
//求结点的左子树高度
int leftH = _Height(root->_left);
//求结点的右子树高度
int rightH = _Height(root->_right);
//判断平衡因子是否正确
if (rightH - leftH != root->_bf)
{
cout << root->_kv.first << "结点平衡因子异常" << endl;
return false;
}
//每一个结点都检查是否满足平衡树
return abs(leftH - rightH) < 2
&& _IsBalance(root->_left)
&& _IsBalance(root->_right);
}
private:
Node* _root = nullptr;
};
}
void Test01()
{
//int a[] = { 16,3,7,11,9,26,18,14,15 };
int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };
dong::AVLTree<int, int> t1;
for (auto e : a)
{
if (e == 14)
{
//只是用来打断点用
int x = 0;
}
t1.Insert(std::make_pair(e,e));
cout << e << "插入:" << t1.IsBalance() << endl;
}
t1.InOrder();
cout << t1.IsBalance() << endl;
}
void Test02()
{
srand(time(0));
const size_t N = 100000;
dong::AVLTree<int, int> t;
//生成随机数插入到AVL树中
for (size_t i = 0; i < N; ++i)
{
size_t x = rand();
t.Insert(std::make_pair(x, x));
}
//看最后是否还满足AVL树
cout << t.IsBalance() << endl;
}
int main()
{
//Test01();
Test02();
return 0;
}







![[GitLab] 安装Git 指定版本](https://img-blog.csdnimg.cn/d2b68a6bbedc4c92a0ce048954c7b793.png)