1、kcp 的协议特点
1.1、RTO 不翻倍
RTO(Retransmission TimeOut),重传超时时间。tcp x 2,kcp x 1.5,提高传输速度

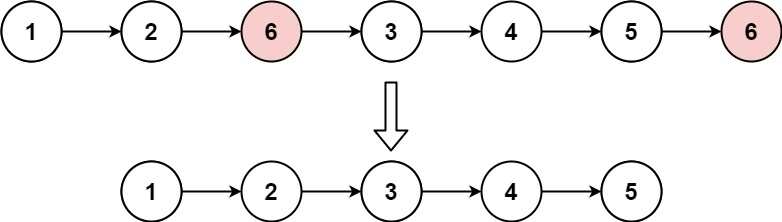
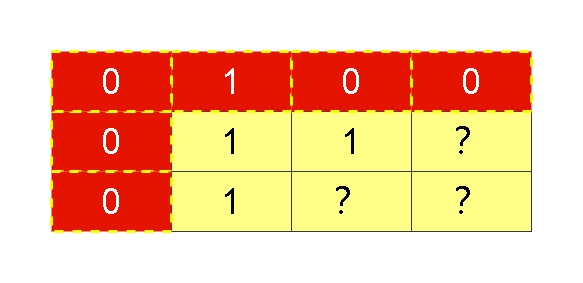
1.2、选择重传
TCP丢包时会全部重传从该包开始以后的数据,而KCP选择性重传,只重传真正丢失的数据包。
1.3、快速重传
tcp 重传模式
超时重传:超过规定的时间 RTO 则重传
快速重传:收到三个冗余ACK,不去等待RTO ,直接重传
这里指的是收到fastresend个失序报文后,不等待超时,直接重传,减少丢包等待时间。
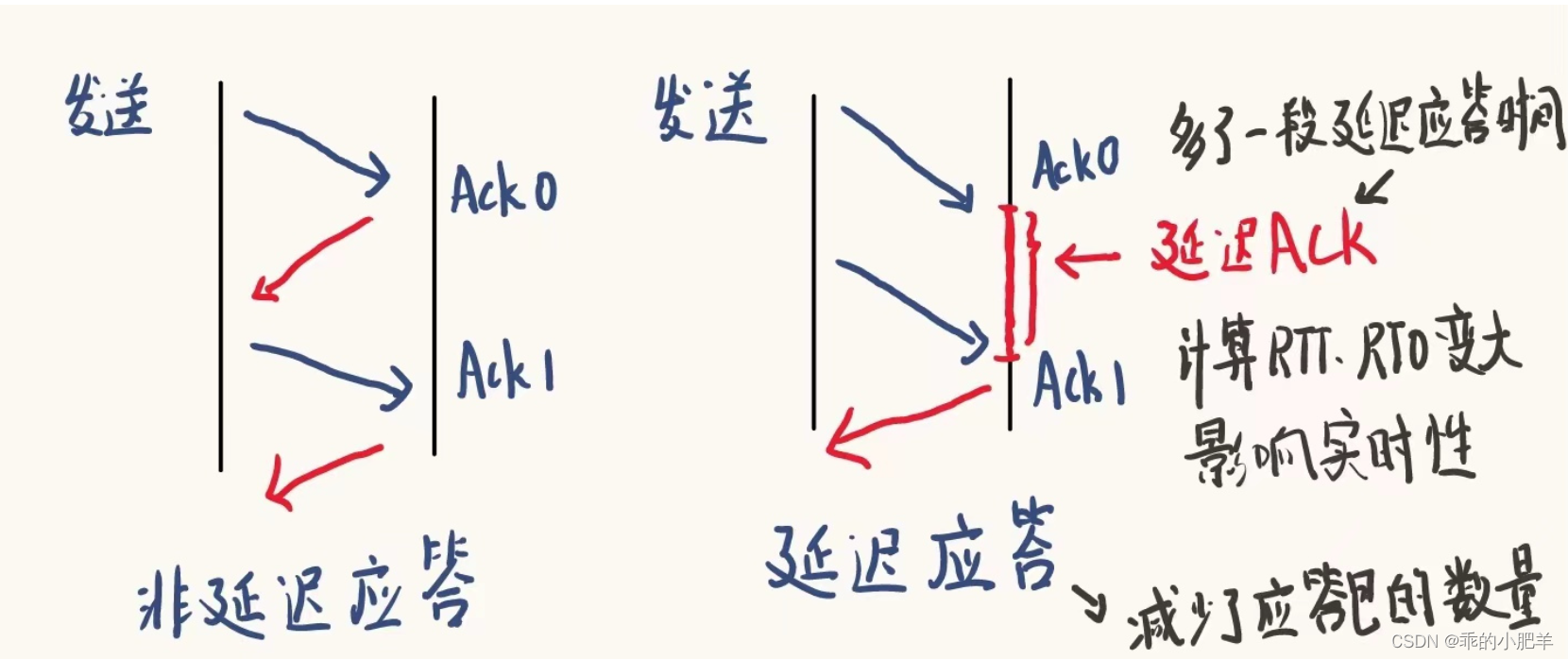
1.4、非延迟 ACK
tcp 为充分利用带宽,延迟发送 ACK,RTT 时间较大,延长了丢包时的判断过程。而 kcp 的 ACK 是否延迟发送可以调节。
1.5、ACK + UNA
ARQ (自动重传请求,Automatic Repeat-reQuest)模型响应有两种方式
UNA:此编号前所有包已收到,tcp
ACK:该编号包已收到
只用 UNA 将导致全部重传,只用 ACK 则丢失成本太高,以往协议都是二选其一。而 kcp 协议中,除去单独的 ACK 包(精确)外,所有包都有 UNA 信息。
1.6、非退让流控
KCP正常模式同TCP一样使用公平退让法则,即发送窗口大小由:发送缓存大小、接收端剩余接收缓存大小、丢包退让、慢启动这四要素决定。但传送及时性要求很高的小数据时,可选择仅用前两项来控制发送频率。以牺牲部分公平性及带宽利用率之代价,换取了流畅传输的效果。
KCP 实时性好,但带宽利用率较低,因为
非退让流控,不断尝试发送数据,有效包不多
每个包应答,占用一定的带宽
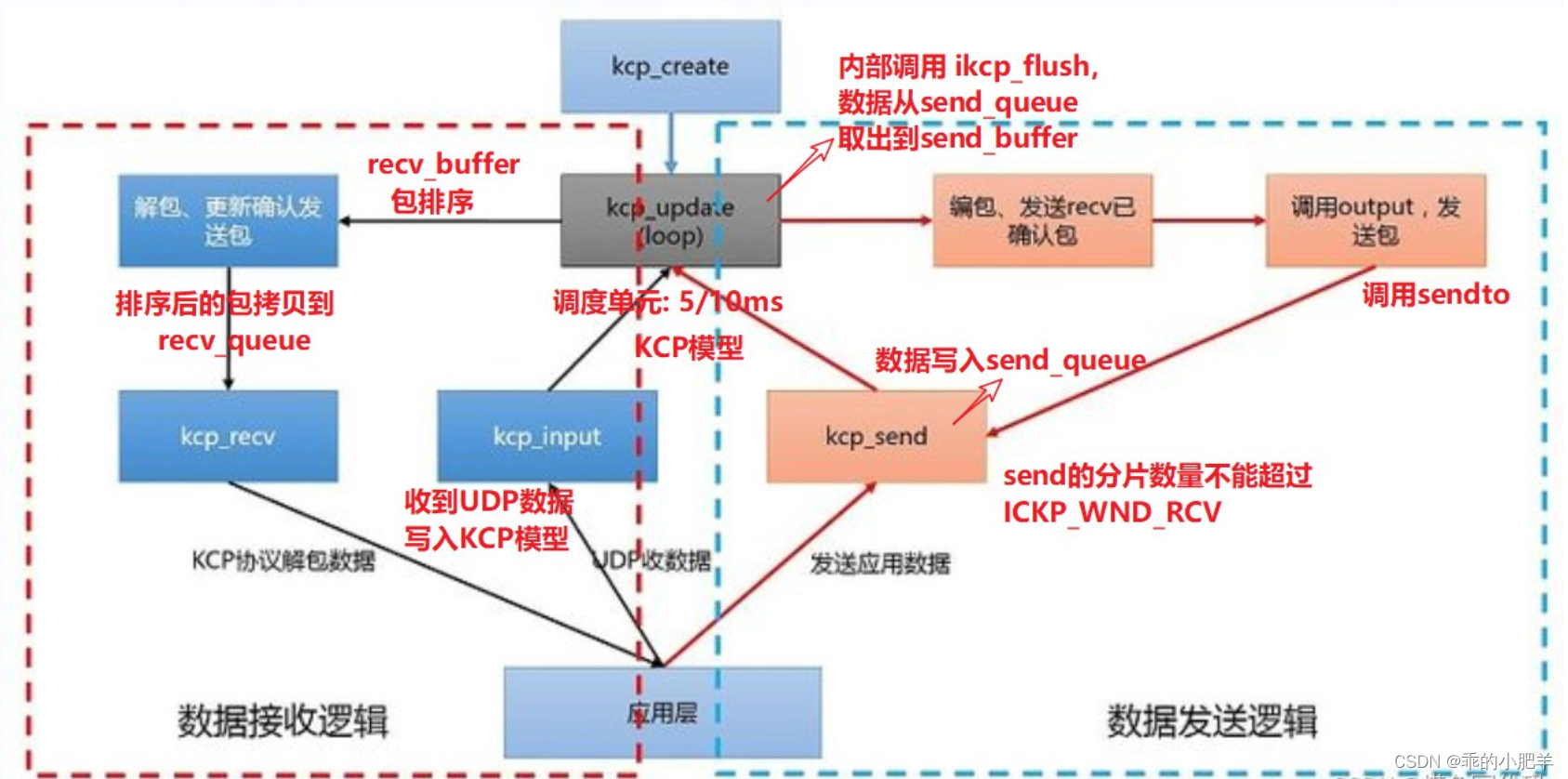
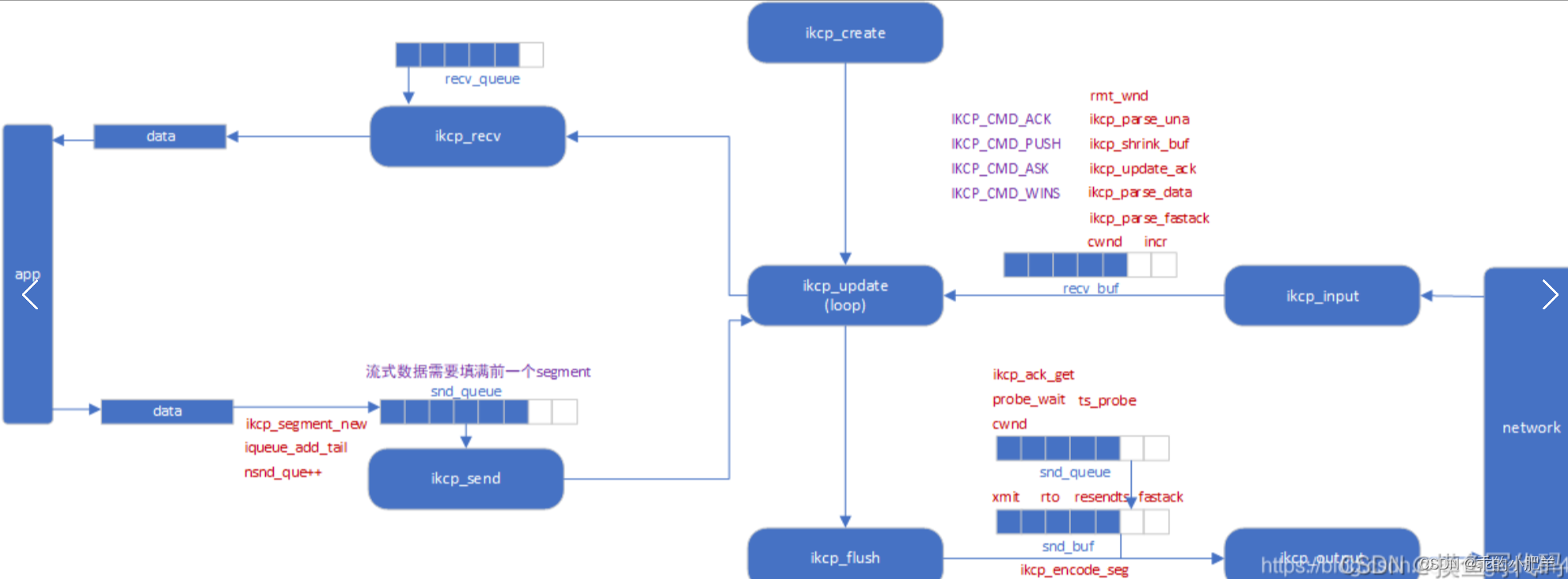
2.kcp 实现
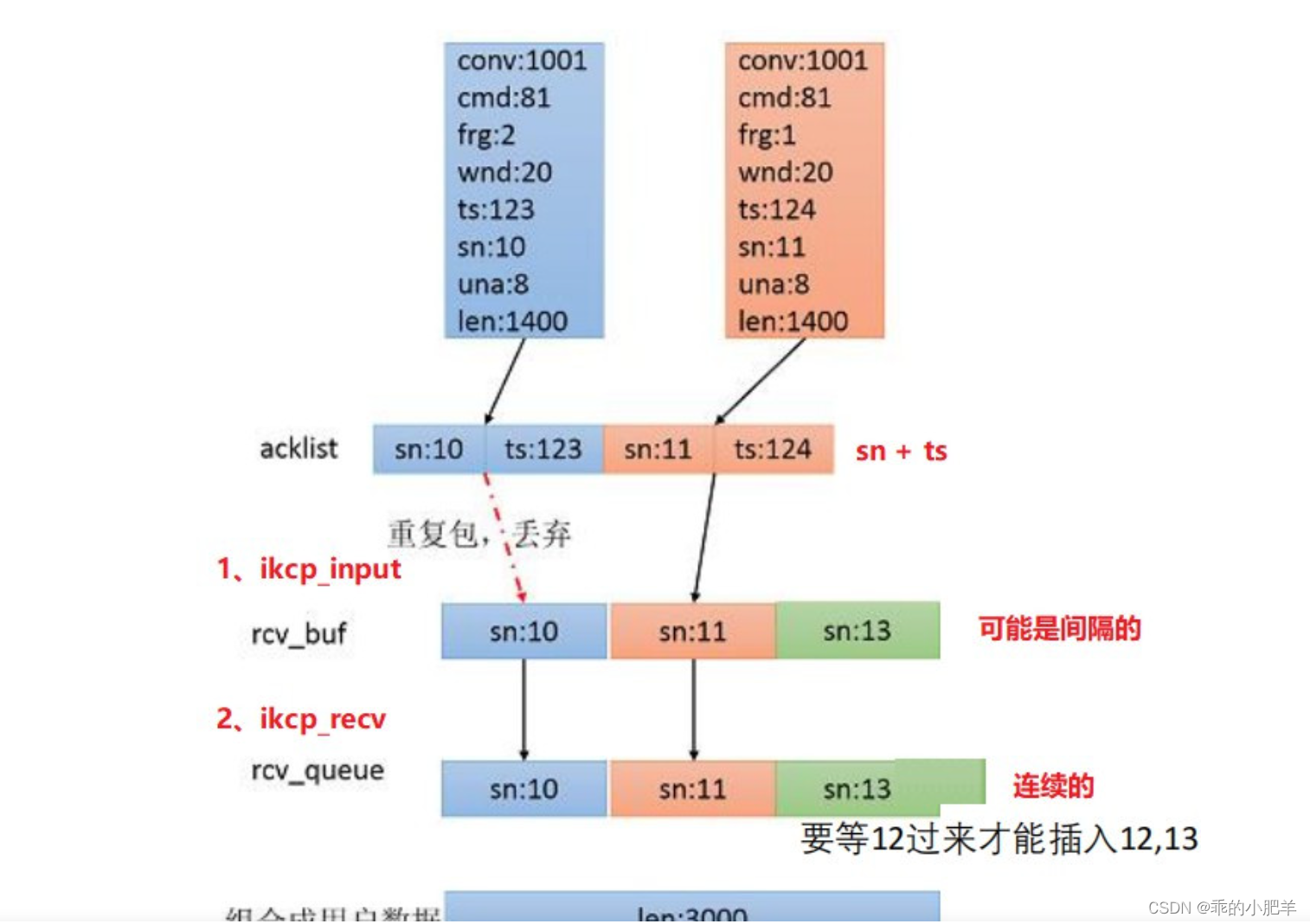
UDP收到的报文通过kcp_input传递给KCP,KCP会对数据进行解包,重新封装成应用层用户数据,应用层通过kcp_recv获取。应用层通过kcp_send发送数据,KCP会把用户数据拆分kcp报文,通过kcp_output,以UDP(send)的方式发送。
2.1、kcp 数据结构
kcp 报文结构:
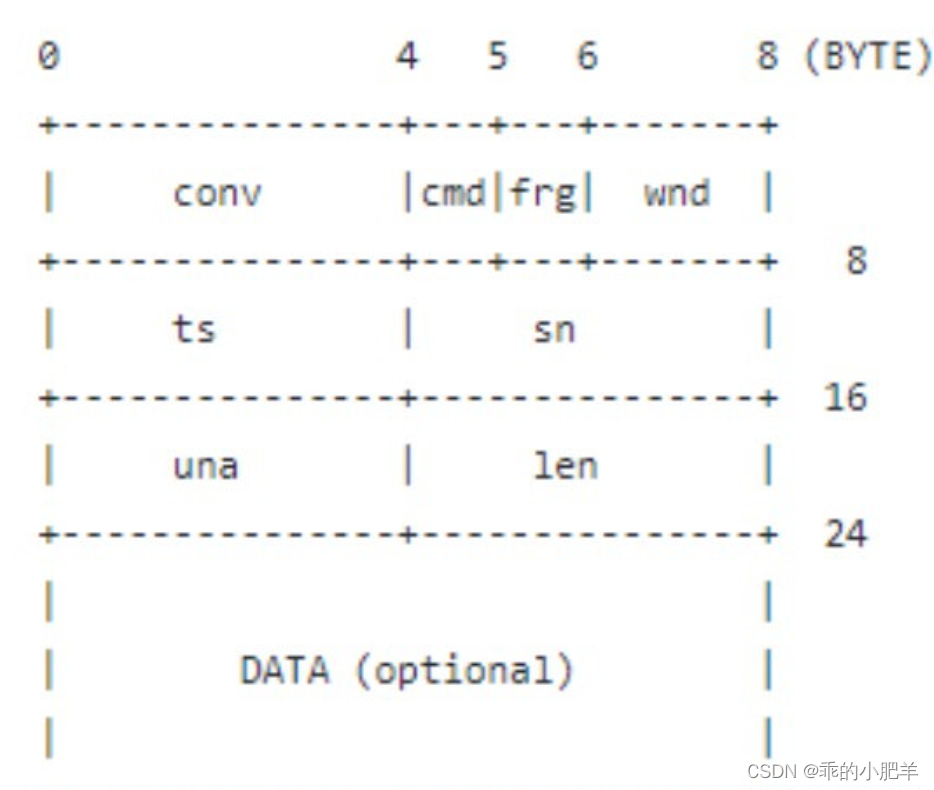
conv:会话编号,通信双方必须一致。
cmd:报文类型
IKCP_CMD_ACK 确认命令
IKCP_CMD_PUSH 数据推送命令
IKCP_CMD_WASK 接收窗口询问大小命令
IKCP_CMD_WINS 接收窗口大小告知命令
wnd: 己方可用接收窗口大小,接收窗口大小 - 接收队列大小
frg:segmen t分片。0,最后一个分片。3 2 1 0
sn:segment 报文的序列号。
ts:发送时间戳,用于计算RTO和RTT
una:待接收的序列号,其实确认号,表示该序列号之前的所有报文都收到了,可以删除
len:数据长度,DATA的长度
DATA: 用户数据
kcp 使用的 Segment 定义如下
struct IKCPSEG
{
struct IQUEUEHEAD node; // 用来串接多个 KCP segment,即前向后向指针
IUINT32 conv; // 会话编号
IUINT32 cmd; // 报文类型
IUINT32 frg; // 分片
IUINT32 wnd; // 可用接收窗口大小(接收窗口大小-接收队列大小)
IUINT32 ts; // 发送时刻的时间戳
IUINT32 sn; // 分片 segment 的序号
IUINT32 una; // 待接收消息序号
IUINT32 len; // 数据长度
IUINT32 resendts; // 下次超时重传该报文的时间戳
IUINT32 rto; // 重传超时时间
//发送端在发送过程中携带着RTO,该发送端会启动一个定时器,进行定时,如果超过RTO就会重传
IUINT32 fastack; // 收到ack时该分片被跳过的次数,用于快速重传
IUINT32 xmit; // 记录了该报文被传输了几次
char data[1]; // 实际传输的数据 payload
};
每一个 KCP 用户都需要调用 ikcp_create 创建一个 kcp 控制块 ikcpcb。ikcpcb 结构用来实现整个 KCP 协议。
struct IKCPCB
{
IUINT32 conv; // 标识会话
IUINT32 mtu; // 最大传输单元,默认数据为1400,最小为50
IUINT32 mss; // 最大分片大小,不大于mtu
IUINT32 state; // 连接状态(0xffffffff表示断开连接)
IUINT32 snd_una; // 第一个未确认的包
IUINT32 snd_nxt; // 下一个待分配包的序号
IUINT32 rcv_nxt; // 待接收消息序号.为了保证包的顺序,接收方会维护一个接收窗口,接收窗口有一个起始序号rcv_nxt 以及尾序号rcv_nxt + rcv_wnd(接收窗口大小)
IUINT32 ts_recent;
IUINT32 ts_lastack;
IUINT32 ssthresh; // 拥塞窗口的阈值
IINT32 rx_rttval; // RTT的变化量,代表连接的抖动情况
IINT32 rx_srtt; // smoothed round trip time,平滑后的RTT;
IINT32 rx_rto; // 收ACK接收延迟计算出来的重传超时时间
IINT32 rx_minrto; // 最小重传超时时间
IUINT32 snd_wnd; // 发送窗口大小
IUINT32 rcv_wnd; // 接收窗口大小,本质上而言如果接收端一直不去读取数据则rcv_queue就会满(达到rcv_wnd)
IUINT32 rmt_wnd; // 远端接收窗口大小
IUINT32 cwnd; // 拥塞窗口大小, 动态变化
IUINT32 probe; // 探查变量, IKCP_ASK_TELL表示告知远端窗口大小。IKCP_ASK_SEND表示请求远端告知窗口大小;
IUINT32 current;
IUINT32 interval; // 内部flush刷新间隔,对系统循环效率有非常重要影响, 间隔小了cpu占用率高, 间隔大了响应慢
IUINT32 ts_flush; // 下次flush刷新的时间戳
IUINT32 xmit; // 发送segment的次数, 当segment的xmit增加时,xmit增加(重传除外)
IUINT32 nrcv_buf; // 接收缓存中的消息数量
IUINT32 nsnd_buf; // 发送缓存中的消息数量
IUINT32 nrcv_que; // 接收队列中消息数量
IUINT32 nsnd_que; // 发送队列中消息数量
IUINT32 nodelay; // 是否启动无延迟模式。无延迟模式rtomin将设置为0,拥塞控制不启动;
IUINT32 updated; //是否调用过update函数的标识;
IUINT32 ts_probe; // 下次探查窗口的时间戳;
IUINT32 probe_wait; // 探查窗口需要等待的时间;
IUINT32 dead_link; // 最大重传次数,被认为连接中断;
IUINT32 incr; // 可发送的最大数据量;
struct IQUEUEHEAD snd_queue; //发送消息的队列
struct IQUEUEHEAD rcv_queue; //接收消息的队列, 确认过用户可读取
struct IQUEUEHEAD snd_buf; //发送消息的缓存
struct IQUEUEHEAD rcv_buf; //接收消息的缓存
IUINT32 *acklist; //待发送的ack的列表 当收到一个数据报文时,将其对应的 ACK 报文的 sn 号以及时间戳 ts
//同时加入到acklist 中,即形成如 [sn1, ts1, sn2, ts2 …] 的列表
IUINT32 ackcount; // 记录 acklist 中存放的 ACK 报文的数量
IUINT32 ackblock; // acklist 数组的可用长度,当 acklist 的容量不足时,需要进行扩容
void *user; // 指针,可以任意放置代表用户的数据,也可以设置程序中需要传递的变量;
char *buffer; // 存储字节流信息
int fastresend; // 触发快速重传的重复ACK个数;
int fastlimit;
int nocwnd; // 取消拥塞控制
int stream; // 是否采用流传输模式
int logmask; // 日志的类型,如IKCP_LOG_IN_DATA,方便调试
int (*output)(const char *buf, int len, struct IKCPCB *kcp, void *user);//发送消息的回调函数
void (*writelog)(const char *log, struct IKCPCB *kcp, void *user); // 写日志的回调函数
};
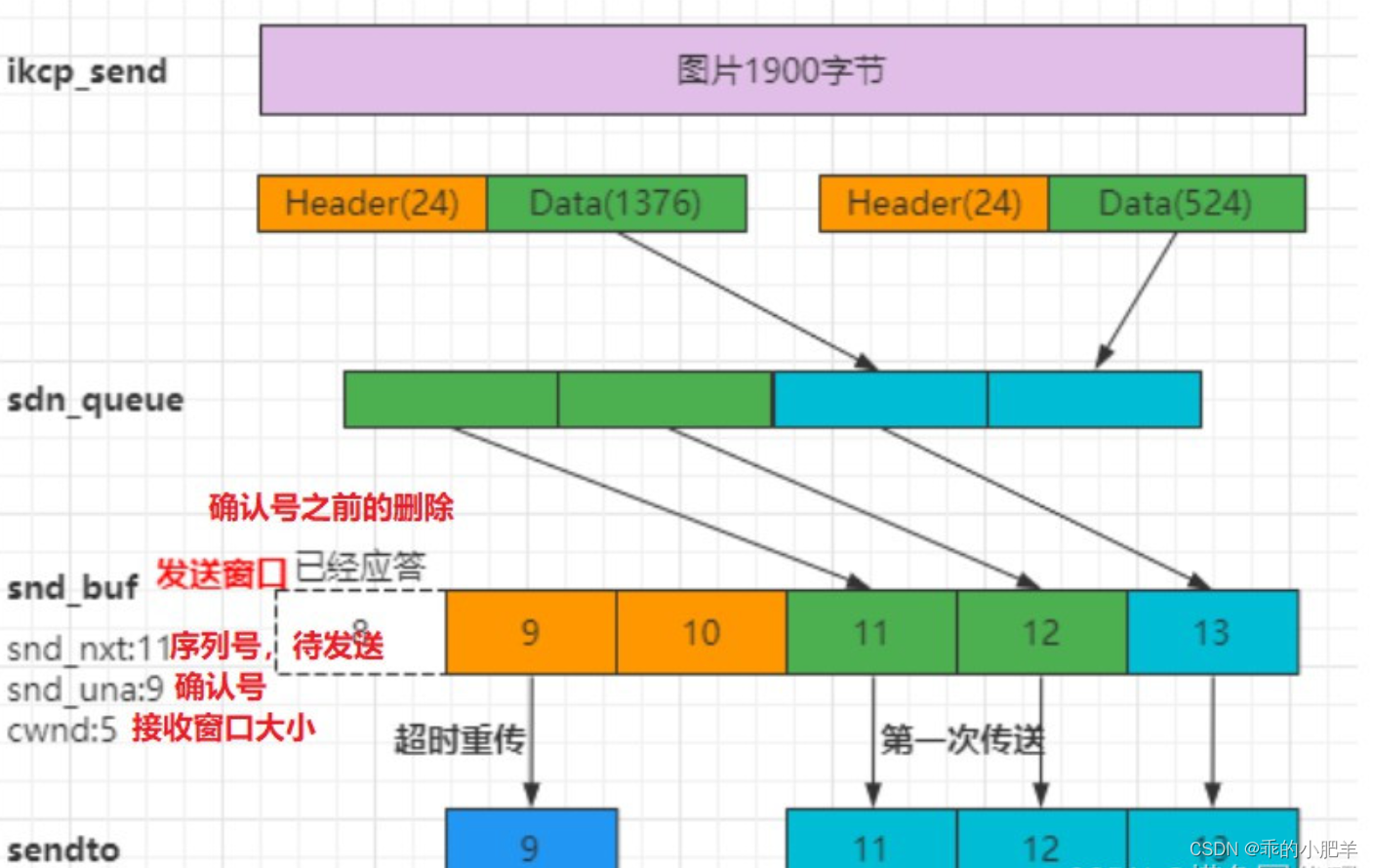
2.2、kcp 报文发送
KCP 中,数据发送流程分为:
- 上层应用调用
ikcp_send将数据写入snd_queue - 下层函数
ikcp_flush决定将多少数据从snd_queue移动到snd_buf,进行发送
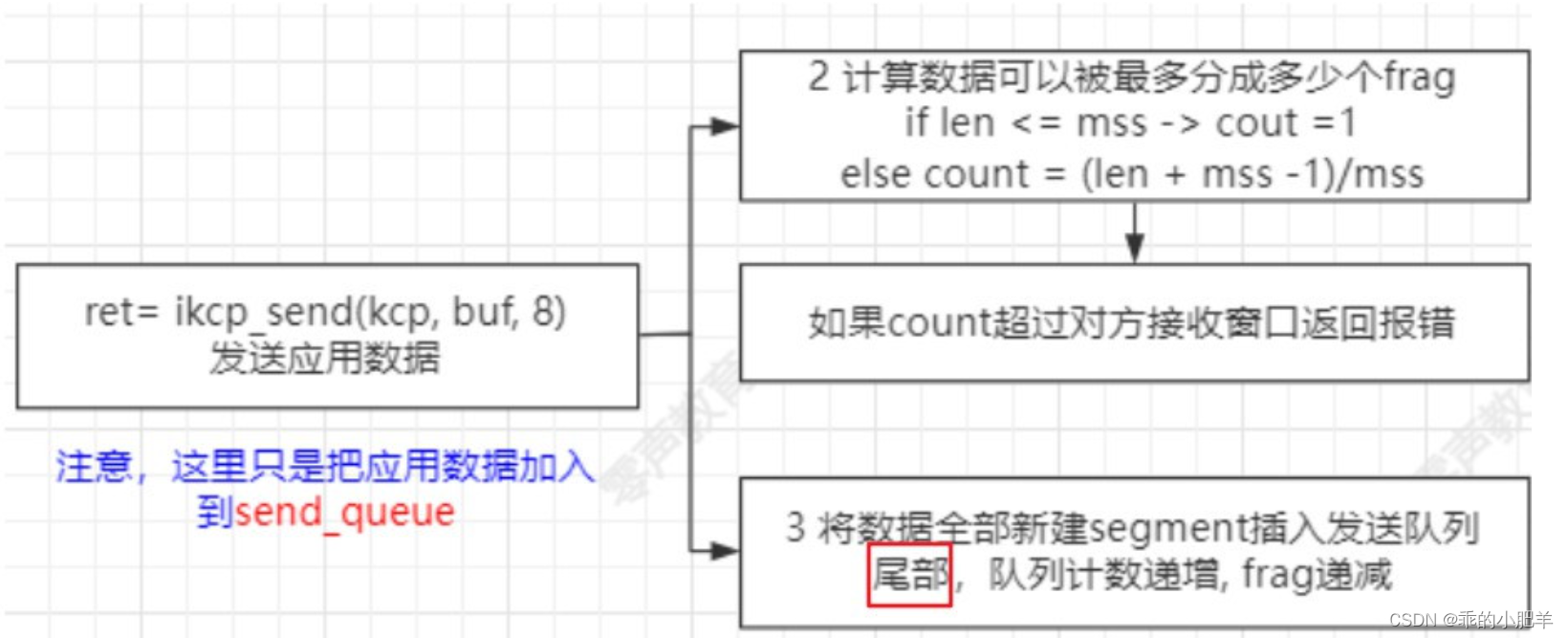
ikcp_send
 ikcp_send
ikcp_send
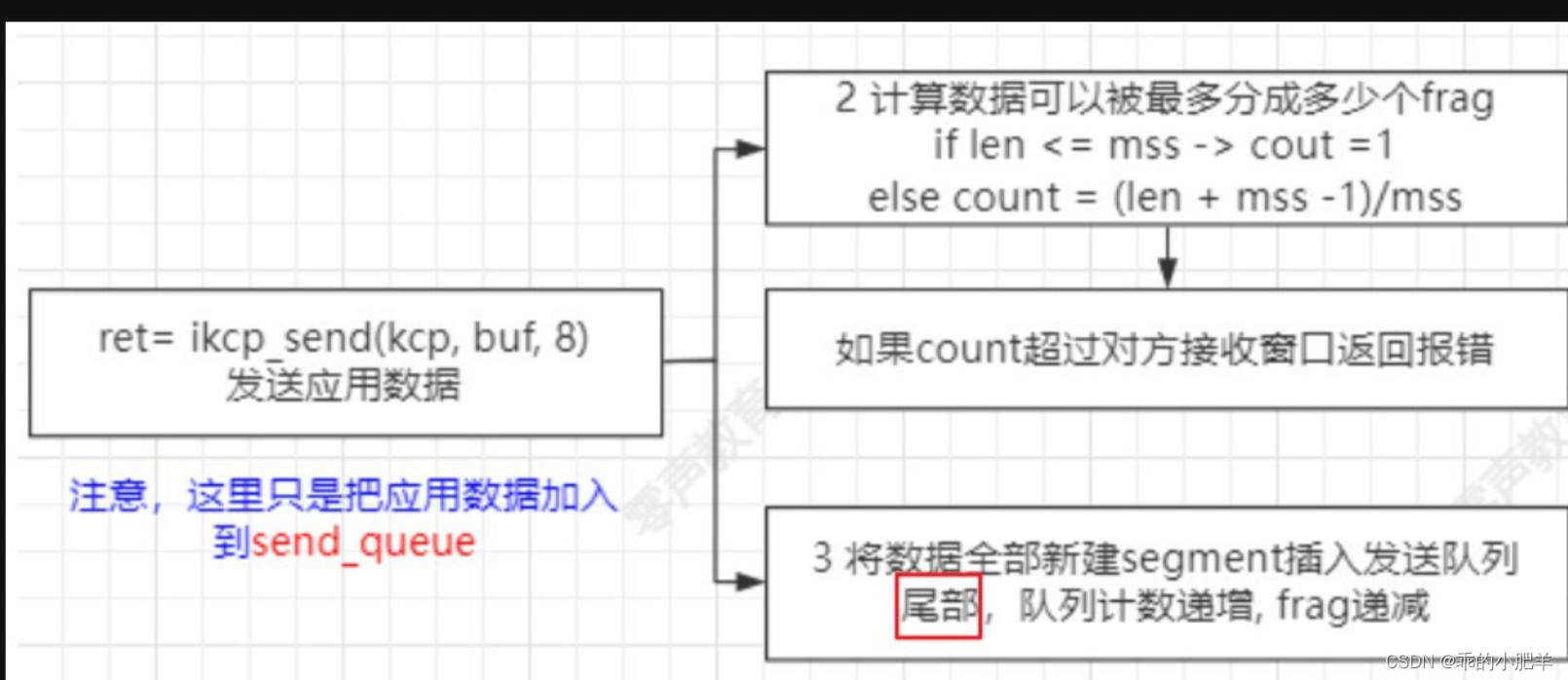
ikcp_send 的功能:把用户发送的数据根据MSS分片成KCP的数据包格式,插入待发送队列
分片方式
流模式:检测每个发送队列⾥的分片是否达到 MSS,没有达到则用新的数据填充分片。
消息模式:将用户数据的每个分片设置 sn 和 frag,将分片后的数据存入发送队列,接收方通过 sn 和 frag 解包。即使⼀个分片的数据量可能不能达到MSS,也会作为⼀个包发送出去。
int ikcp_send(ikcpcb *kcp, const char *buffer, int len)
{
// 1、如果KCP开启流模式
if (kcp->stream != 0) {
if (!iqueue_is_empty(&kcp->snd_queue)) {
// 取出 snd_queue 中的最后一个报文,将其填充到 mss 的长度,设置frg为0
IKCPSEG *old = iqueue_entry(kcp->snd_queue.prev, IKCPSEG, node);
// 旧分片内数据长度小于mss
if (old->len < kcp->mss) {
int capacity = kcp->mss - old->len; // 还能容纳的数据长度
int extend = (len < capacity)? len : capacity; // 需要填充的长度
seg = ikcp_segment_new(kcp, old->len + extend); // 新建segment
assert(seg);
if (seg == NULL) {
return -2;
}
// 新分片添加到发送队列尾部
iqueue_add_tail(&seg->node, &kcp->snd_queue);
// 拷贝旧分片的数据到新分片
memcpy(seg->data, old->data, old->len);
// 将buffer中的数据也拷贝到新分片
if (buffer) {
memcpy(seg->data + old->len, buffer, extend);
buffer += extend; // buffer指向剩余数据的开头
}
seg->len = old->len + extend;
seg->frg = 0;
len -= extend; // 更新len为剩余数据长度
iqueue_del_init(&old->node); // 删除old
ikcp_segment_delete(kcp, old);
}
}
if (len <= 0) {
return 0;
}
}
// 2、计算数据需要分成多少段报文
if (len <= (int)kcp->mss) count = 1; // mss 1376 + head 24 = mtu 1400
else count = (len + kcp->mss - 1) / kcp->mss;
if (count >= (int)IKCP_WND_RCV) return -2; // 超过对方的初始接收窗口
if (count == 0) count = 1;
// fragment
// 3、将数据全部新建 segment 插入发送队列尾部,队列计数递增, frag 递减
for (i = 0; i < count; i++) {
int size = len > (int)kcp->mss ? (int)kcp->mss : len;
seg = ikcp_segment_new(kcp, size);
assert(seg);
if (seg == NULL) {
return -2;
}
if (buffer && len > 0) { // 仍有待发送的数据
memcpy(seg->data, buffer, size);
}
seg->len = size;
// 分片编号,逆序。流模式情况下分片编号不用填写
seg->frg = (kcp->stream == 0)? (count - i - 1) : 0;
iqueue_init(&seg->node);
iqueue_add_tail(&seg->node, &kcp->snd_queue); // 加入到 snd_queue 中
kcp->nsnd_que++;
if (buffer) {
buffer += size;
}
len -= size;
}
}
应用层调用 ikcp_send 之后将用户数据置入 snd_queue 中,当 KCP 调用 ikcp_flush 时才将数据从 snd_queue 中 移入到 snd_buf 中,然后调用 kcp->output() 发送。
 检查 kcp->update 是否更新,未更新直接返回。kcp->update 由
检查 kcp->update 是否更新,未更新直接返回。kcp->update 由 ikcp_update 更新,上层应用需要每隔一段时间(10-100ms)调用 ikcp_update 来驱动 KCP 发送数据;
// 'ikcp_update' haven't been called.
if (kcp->updated == 0) return;
准备将 acklist 中记录的 ACK 报文发送出去,即从 acklist 中填充 ACK 报文的 sn 和 ts 字段;
// flush acknowledges
// 逐一获取 acklist 中的 sn 和 ts,编码成 segment,以流的方式凑够 MTU 发送
count = kcp->ackcount; // 需要应答的分片数量
for (i = 0; i < count; i++) {
size = (int)(ptr - buffer);
// 超过 MTU 大小直接发送
if (size + (int)IKCP_OVERHEAD > (int)kcp->mtu) {
ikcp_output(kcp, buffer, size);
ptr = buffer; // 新建分片
}
ikcp_ack_get(kcp, i, &seg.sn, &seg.ts); // 应答包
ptr = ikcp_encode_seg(ptr, &seg); // 编码segment协议头
}
kcp->ackcount = 0;
检查当前是否需要对远端窗口进行探测。由于 KCP 流量控制依赖于远端通知其可接受窗口的大小,一旦远端接受窗口 kcp->rmt_wnd 为0,那么本地将不会再向远端发送数据,因此就没有机会从远端接受 ACK 报文,从而没有机会更新远端窗口大小。在这种情况下,KCP 需要发送窗口探测报文到远端,待远端回复窗口大小后,后续传输可以继续:
// probe window size (if remote window size equals zero)
// 1、远端窗口大小为0,需要发送窗口探测报文
if (kcp->rmt_wnd == 0) {
// 初始化探测间隔和下一次探测时间
if (kcp->probe_wait == 0) {
kcp->probe_wait = IKCP_PROBE_INIT; // 默认7秒探测
kcp->ts_probe = kcp->current + kcp->probe_wait; // 下一次探测时间
}
else {
//远端窗口为0,发送过探测请求,但是已经超过下次探测的时间
// 检测是否到了探测时间
if (_itimediff(kcp->current, kcp->ts_probe) >= 0) {
// 更新探测间隔probe_wait
if (kcp->probe_wait < IKCP_PROBE_INIT)
kcp->probe_wait = IKCP_PROBE_INIT;
kcp->probe_wait += kcp->probe_wait / 2;
if (kcp->probe_wait > IKCP_PROBE_LIMIT)
kcp->probe_wait = IKCP_PROBE_LIMIT;
// 更新下次探测时间ts_probe
kcp->ts_probe = kcp->current + kcp->probe_wait;
// 更新探测变量probe为IKCP_ASK_SEND,发送探测消息
kcp->probe |= IKCP_ASK_SEND;
}
}
}
// 2、远端窗口正常,则不需要发送窗口探测
else {
kcp->ts_probe = 0; // 更新下次探测时间为0
kcp->probe_wait = 0; // 更新探测窗口等待时间为0
}
将窗口探测报文和窗口回复报文发送出去
// flush window probing commands
if (kcp->probe & IKCP_ASK_SEND) {
seg.cmd = IKCP_CMD_WASK; // 窗口探测[询问对方窗口size]
size = (int)(ptr - buffer);
if (size + (int)IKCP_OVERHEAD > (int)kcp->mtu) {
ikcp_output(kcp, buffer, size);
ptr = buffer;
}
ptr = ikcp_encode_seg(ptr, &seg);
}
// flush window probing commands
if (kcp->probe & IKCP_ASK_TELL) {
seg.cmd = IKCP_CMD_WINS; // 窗口告知[告诉对方我方窗口size]
size = (int)(ptr - buffer);
if (size + (int)IKCP_OVERHEAD > (int)kcp->mtu) {
ikcp_output(kcp, buffer, size);
ptr = buffer;
}
ptr = ikcp_encode_seg(ptr, &seg);
}
kcp->probe = 0; //清空标识
计算本次发送可用的窗口大小,这里 KCP 采用了可以配置的策略,正常情况下,KCP 的窗口大小由发送窗口 snd_wnd,远端接收窗口 rmt_wnd 以及根据流控计算得到的 kcp->cwnd 共同决定;但是当开启了 nocwnd 模式时,窗口大小仅由前两者决定;
// calculate window size
// 若没有流控,取发送窗口和远端接收窗口最小值
cwnd = _imin_(kcp->snd_wnd, kcp->rmt_wnd);
// 若存在流控,则取当前拥塞窗口、发送窗口和远端接收窗口三者最小值
if (kcp->nocwnd == 0) cwnd = _imin_(kcp->cwnd, cwnd);
将缓存在 snd_queue 中的数据移到 snd_buf 中等待发送
// move data from snd_queue to snd_buf
// 从snd_queue移动到snd_buf的数量不能超出对方的接收能力,发送符合拥塞范围的分片
while (_itimediff(kcp->snd_nxt, kcp->snd_una + cwnd) < 0) {
IKCPSEG *newseg;
if (iqueue_is_empty(&kcp->snd_queue)) break;
newseg = iqueue_entry(kcp->snd_queue.next, IKCPSEG, node);
iqueue_del(&newseg->node);
iqueue_add_tail(&newseg->node, &kcp->snd_buf); // 添加到发送缓存
kcp->nsnd_que--;
kcp->nsnd_buf++;
//设置数据分片的属性
newseg->conv = kcp->conv;
newseg->cmd = IKCP_CMD_PUSH;
newseg->wnd = seg.wnd; // 告知对方当前的接收窗口
newseg->ts = current; // 当前时间
newseg->sn = kcp->snd_nxt++; // 序号
newseg->una = kcp->rcv_nxt; // 告诉对方可以发送的下一个包序号
newseg->resendts = current; // 当前发送的时间
newseg->rto = kcp->rx_rto; // 超时重传的时间
newseg->fastack = 0; // 是否快速重传
newseg->xmit = 0; // 重传次数
}
在发送数据之前,先设置快重传的次数和重传间隔;KCP 允许设置快重传的次数,即 fastresend 参数。例如设置 fastresend 为2,并且发送端发送了1,2,3,4,5几个包,收到远端的ACK: 1, 3, 4, 5,当收到ACK3时,KCP知道2被跳过1次,收到ACK4时,知道2被**“跳过”**了2次,此时可以认为2号丢失,不用等超时,直接重传2号包;每个报文的 fastack 记录了该报文被跳过了几次,由函数 ikcp_parse_fastack 更新。于此同时,KCP 也允许设置 nodelay 参数,当激活该参数时,每个报文的超时重传时间将由 x2 变为 x1.5,即加快报文重传:
// calculate resent
// 是否设置快重传次数
resent = (kcp->fastresend > 0)? (IUINT32)kcp->fastresend : 0xffffffff;
// 是否开启nodelay
rtomin = (kcp->nodelay == 0)? (kcp->rx_rto >> 3) : 0;
将 snd_buf 中的数据发送出去
// flush data segments
// 发送snd buf的分片,只要数据还在snd_buf 说明对方还没有应答
// 1、新的报文,正常发送
// 2、超时重传
// 3、快速重传(如果有)
for (p = kcp->snd_buf.next; p != &kcp->snd_buf; p = p->next) {
IKCPSEG *segment = iqueue_entry(p, IKCPSEG, node);
int needsend = 0;
// 1、如果该报文是第一次传输,那么直接发送
if (segment->xmit == 0) {
needsend = 1;
segment->xmit++; // 分片发送次数 + 1
segment->rto = kcp->rx_rto; // 超时时间间隔
segment->resendts = current + segment->rto + rtomin; // 下一次要发送的时间
}
// 2、当前时间达到了该报文的重传时间,但并没有新的ack到达,出现丢包, 重传
else if (_itimediff(current, segment->resendts) >= 0) {
needsend = 1;
segment->xmit++;
kcp->xmit++;
// 根据 nodelay 参数更新重传时间
if (kcp->nodelay == 0) {
segment->rto += _imax_(segment->rto, (IUINT32)kcp->rx_rto);
} else {
IINT32 step = (kcp->nodelay < 2)? ((IINT32)(segment->rto)) : kcp->rx_rto;
segment->rto += step / 2; //报文超时等待时间更新,控制RTO=1.5
}
segment->resendts = current + segment->rto; //下一次发送的时间
lost = 1; // 丢包,反应到拥塞控制策略去了
}
// 3、该报文的的被跳过次数超过设置的快速重传次数,需要重传
else if (segment->fastack >= resent) {
if ((int)segment->xmit <= kcp->fastlimit || kcp->fastlimit <= 0) {
needsend = 1;
segment->xmit++;
segment->fastack = 0; // 重置该分片被跳过的次数
segment->resendts = current + segment->rto;
change++; // 标识快速重传的发生
}
}
// 需要发送数据
if (needsend) {
int need;
segment->ts = current;
segment->wnd = seg.wnd; // 己方可用接收窗口大小
segment->una = kcp->rcv_nxt; // 待接收的下一个包序号
size = (int)(ptr - buffer);
need = IKCP_OVERHEAD + segment->len;
// 小包封装成大包发送
if (size + need > (int)kcp->mtu) {
ikcp_output(kcp, buffer, size);
ptr = buffer;
}
// 把segment封装成线性buffer发送 头部+数据
ptr = ikcp_encode_seg(ptr, segment);
if (segment->len > 0) {
memcpy(ptr, segment->data, segment->len);
ptr += segment->len;
}
if (segment->xmit >= kcp->dead_link) {
kcp->state = (IUINT32)-1;
}
}
}
// flash remain segments
size = (int)(ptr - buffer); // 剩余的数据
// 最终只要有数据要发送,一定发出去
if (size > 0) {
ikcp_output(kcp, buffer, size);
}
根据设置的 lost 和 change 更新窗口大小;注意 快重传和丢包时的窗口更新算法不一致,这一点类似于 TCP 协议的拥塞控制和快恢复算法
// update ssthresh
//如果发生了快速重传,拥塞窗口阈值降低为当前未确认包数量的一半或最小值
if (change) {
IUINT32 inflight = kcp->snd_nxt - kcp->snd_una;
kcp->ssthresh = inflight / 2;
if (kcp->ssthresh < IKCP_THRESH_MIN)
kcp->ssthresh = IKCP_THRESH_MIN;
kcp->cwnd = kcp->ssthresh + resent; // 动态调整拥塞控制窗口
kcp->incr = kcp->cwnd * kcp->mss;
}
// 如果发生了丢包,阈值减半, cwd 窗口保留为 1
if (lost) {
kcp->ssthresh = cwnd / 2;
if (kcp->ssthresh < IKCP_THRESH_MIN)
kcp->ssthresh = IKCP_THRESH_MIN;
kcp->cwnd = 1; // 动态调整拥塞控制窗口
kcp->incr = kcp->mss;
}
if (kcp->cwnd < 1) {
kcp->cwnd = 1;
kcp->incr = kcp->mss;
}
2.3、kcp 报文接收
ikcp_recv
应用层接收函数为 ikcp_recv,主要做三件事
读取组好包的数据 rcv_queue -> 用户 buffer
将接收缓存 rcv_buf 的分片转移到接收队列 rcv_queue
如果有接收空间则将 kcp->probe |= IKCP_ASK_TELL ; 以在update的时候告知对方可以发送数据了。
首先检测一下本次接收数据之后,是否需要进行窗口恢复。在前面的内容中解释过,KCP 协议在远端窗口为0的时候将会停止发送数据,此时如果远端调用 ikcp_recv 将数据从 rcv_queue 中移动到应用层 buffer 中之后,表明其可以再次接受数据,为了能够恢复数据的发送,远端可以主动发送 IKCP_ASK_TELL 来告知窗口大小;
if (kcp->nrcv_que >= kcp->rcv_wnd)
recover = 1; // 标记可以开始窗口恢复
开始将 rcv_queue 中的数据根据分片编号 frg merge 起来,然后拷贝到用户的 buffer 中。
// merge fragment
// 将属于同一个消息的各分片重组完整数据,并删除rcv_queue中segment,nrcv_que减少
// 经过 ikcp_send 发送的数据会进行分片,分片编号为倒序序号,因此frg为0的数据包标记着完整接收到了一次 send 发送过来的数据
for (len = 0, p = kcp->rcv_queue.next; p != &kcp->rcv_queue; ) {
int fragment;
seg = iqueue_entry(p, IKCPSEG, node);
p = p->next;
if (buffer) {
memcpy(buffer, seg->data, seg->len); // 把queue的数据就放入用户buffer
buffer += seg->len;
}
len += seg->len;
fragment = seg->frg;
if (ikcp_canlog(kcp, IKCP_LOG_RECV)) {
ikcp_log(kcp, IKCP_LOG_RECV, "recv sn=%lu", (unsigned long)seg->sn);
}
if (ispeek == 0) {
iqueue_del(&seg->node);
ikcp_segment_delete(kcp, seg); // 删除节点
kcp->nrcv_que--; // nrcv_que接收队列-1
}
// frg = 0,完整的数据接收到, 本次数据接收结束
if (fragment == 0) //
break;
}
下一步将 rcv_buf 中的数据转移到 rcv_queue 中,这个过程根据报文的 sn 编号来确保转移到 rcv_queue 中的数据一定是按序的:
// move available data from rcv_buf -> rcv_queue
// 将 rcv_buf 中的数据转移到 rev_queue
// 根据报文的sn来确保转移到 rcv_queue 中的数据一定是按序的
while (! iqueue_is_empty(&kcp->rcv_buf)) {
seg = iqueue_entry(kcp->rcv_buf.next, IKCPSEG, node);
// 1、根据 sn 确保数据是按序转移到 rcv_queue 中
// 2、接收队列nrcv_que < 接收窗口rcv_wnd;
if (seg->sn == kcp->rcv_nxt && kcp->nrcv_que < kcp->rcv_wnd) {
iqueue_del(&seg->node);
kcp->nrcv_buf--;
iqueue_add_tail(&seg->node, &kcp->rcv_queue);
kcp->nrcv_que++; // 接收队列 有多少个分片 + 1
kcp->rcv_nxt++; // 接收序号 + 1
} else {
break;
}
}
最后进行窗口恢复。此时如果 recover 标记为1,表明在此次接收之前,可用接收窗口为0,如果经过本次接收之后,可用窗口大于0,将主动发送 IKCP_ASK_TELL 数据包来通知对方已可以接收数据:
// fast recover
// nrcv_que小于rcv_wnd, 说明接收端有空间继续接收数据了
if (kcp->nrcv_que < kcp->rcv_wnd && recover) {
// ready to send back IKCP_CMD_WINS in ikcp_flush
// tell remote my window size
kcp->probe |= IKCP_ASK_TELL;
}
kcp_input
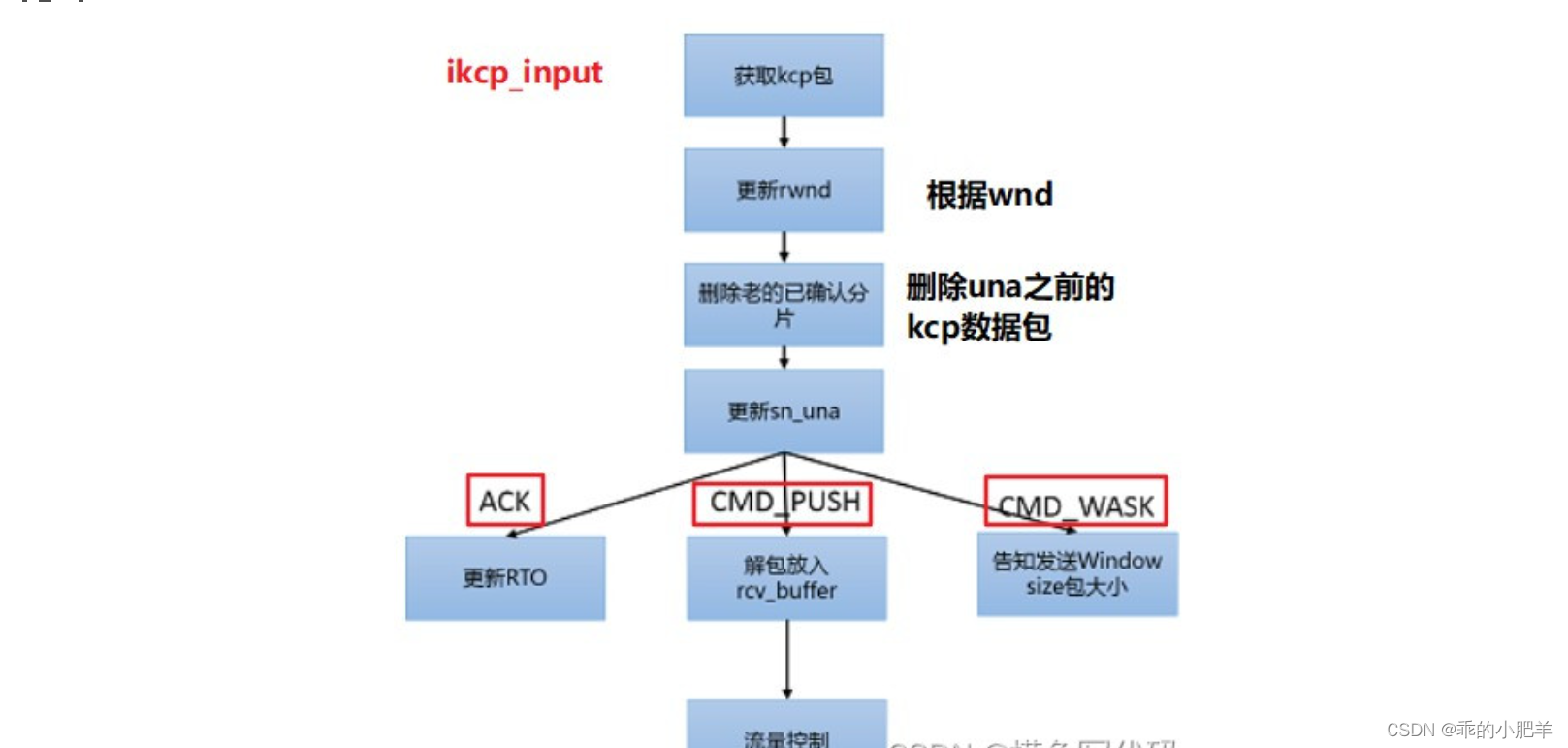
ikcp_recv 仅为上层调用的接口,KCP 协议需要从底层接受数据到 rcv_buf 中,这是通过函数 ikcp_input 实现。ikcp_input 中的所有功能都在一个外层的循环中实现:
首先将接收到的数据包进行解码,并进行基本的数据包长度和类型校验;KCP 协议只会接收到前文中所介绍的四种数据包;
调用 ikcp_parse_una 来确定已经发送的数据包有哪些被对方接收到。KCP 中所有的报文类型均带有 una 信息。发送端发送的数据都会缓存在 snd_buf 中,直到接收到对方确认信息之后才会删除。当接收到 una 信息后,表明 sn 小于 una 的数据包都已经被对方接收到,因此可以直接从 snd_buf 中删除。同时调用 ikcp_shrink_buf 来更新 KCP 控制块的 snd_una 数值。
// 删除小于snd_buf中小于una的segment
ikcp_parse_una(kcp, una);
// 更新snd_una为snd_buf中seg->sn或kcp->snd_nxt ,更新下一个待应答的序号
ikcp_shrink_buf(kcp);
处理 IKCP_CMD_ACK 报文
if (cmd == IKCP_CMD_ACK) {
if (_itimediff(kcp->current, ts) >= 0) { // 根据应答判断rtt
//更新rx_srtt,rx_rttval,计算kcp->rx_rto
ikcp_update_ack(kcp, _itimediff(kcp->current, ts));
}
//遍历snd_buf中(snd_una, snd_nxt),将sn相等的删除,直到大于sn
ikcp_parse_ack(kcp, sn); // 将已经ack的分片删除
ikcp_shrink_buf(kcp); // 更新控制块的 snd_una
if (flag == 0) {
flag = 1; //快速重传标记
maxack = sn; // 记录最大的 ACK 编号
latest_ts = ts;
} else {
if (_itimediff(sn, maxack) > 0) {
maxack = sn; // 记录最大的 ACK 编号
latest_ts = ts;
}
}
处理 IKCP_CMD_PUSH 报文
else if (cmd == IKCP_CMD_PUSH) { //接收到具体的数据包
if (_itimediff(sn, kcp->rcv_nxt + kcp->rcv_wnd) < 0) {
// 对该报文的确认 ACK 报文放入 ack 列表中
ikcp_ack_push(kcp, sn, ts);
// 判断接收的数据分片编号是否符合要求,即:在接收窗口(滑动窗口)范围之内
if (_itimediff(sn, kcp->rcv_nxt) >= 0) { // 是要接受起始的序号
seg = ikcp_segment_new(kcp, len);
seg->conv = conv;
seg->cmd = cmd;
seg->frg = frg;
seg->wnd = wnd;
seg->ts = ts;
seg->sn = sn;
seg->una = una;
seg->len = len;
if (len > 0) {
memcpy(seg->data, data, len);
}
// 将该报文插入到 rcv_buf 链表中
ikcp_parse_data(kcp, seg);
}
}
}
对于接收到的 IKCP_CMD_WASK 报文,直接标记下次将发送窗口通知报文;而对于报文 IKCP_CMD_WINS 无需做任何特殊操作;
else if (cmd == IKCP_CMD_WASK) {
// ready to send back IKCP_CMD_WINS in ikcp_flush
// tell remote my window size
// 如果是探测包,添加相应的标识位
kcp->probe |= IKCP_ASK_TELL;
}
else if (cmd == IKCP_CMD_WINS) {
// do nothing,如果是 tell me 远端窗口大小,什么都不做
}
据记录的最大的 ACK 编号 maxack 来更新 snd_buf 中的报文的 fastack,这个过程在介绍 ikcp_flush 中提到过,对于 fastack 大于设置的 resend 参数时,将立马进行快重传;
最后,根据接收到报文的 una 和 KCP 控制块的 una 参数进行流控;