在存在参数变化、非线性和噪声的情况下,轨道跟踪控制器必须实现更严格的调节。因此,利用闭环伺服系统采用μ合成和H∞优化等先进设计方法,实现鲁棒稳定性和鲁棒性能是合适的。
该磁盘组件由几个被称为圆盘的扁平磁盘组成,其两侧都涂有非常薄的磁性材料层(薄膜介质)。磁性材料用于以磁性图案的形式存储数据。片盘在主轴电机驱动下高速旋转。
硬盘驱动器的原理图:
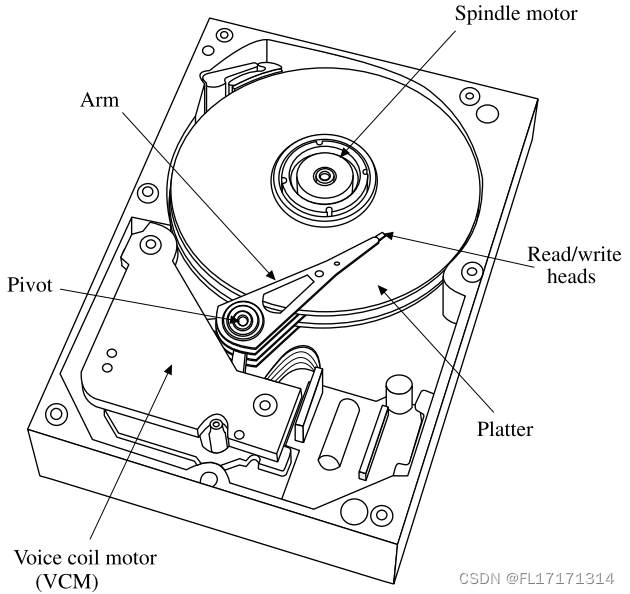
硬盘驱动器伺服控制系统的目标是在数据写入或读取时实现读/写头在所需的跟踪(跟踪跟踪模式)的精确定位,并从一个轨道快速过渡到另一个目标轨道(查找模式)。
硬盘驱动器伺服系统的方框图:
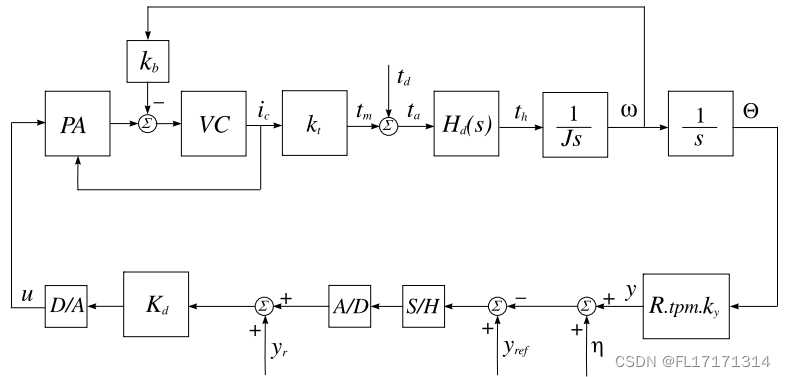
R/W磁头由一个由功率放大器(PA)的输出电流ic驱动的VCM移动。将实际位置信号y与表示所期望头部位置的信号yref进行比较。对于接下来的轨迹,参考输入yref理论上等于零,并且y (t)显示为一个错误信号。在实践中,yref必须被设置为同时代表RRO和NRRO的信号。数字信号yr是所需轨道的参考,并在寻找模式中使用。误差信号由模拟到数字(A/D)转换器采样,并作为数字伺服控制器Kd的输入的一部分,该控制器通常在数字信号处理器(DSP)芯片上实现。控制器的输出通过数字到模拟(D/A)转换器被转换为模拟形式,并通过PA进行放大。
由于电机转矩与音圈电流成正比,因此该放大器被配置为电流源。外源信号td是由外部冲击和振动、功率放大器噪声、数字到模拟转换器噪声、枢轴轴承摩擦和挠曲电缆偏置引起的力矩干扰。主轴转速的增加增加了圆盘内的气流(风轮),进而增加了执行器上的扰动扭矩。该扰动是一种低频信号,其频谱含量通常低于500 Hz。位置噪声信号η包括由于伺服解调器噪声引起的量化误差、模拟到数字转换器的有限分辨率、介质噪声和预放大器噪声。位置噪声是一种频谱含量通常在1 kHz以上的高频信号。由于测量的PES被噪声污染,因此真正的PES无法获得参考。
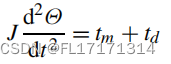
旋转臂的动力学用这个方程来描述:
未完待续!!!
————————————————————————————————
参考文献:
【1】