一、网络模型结构
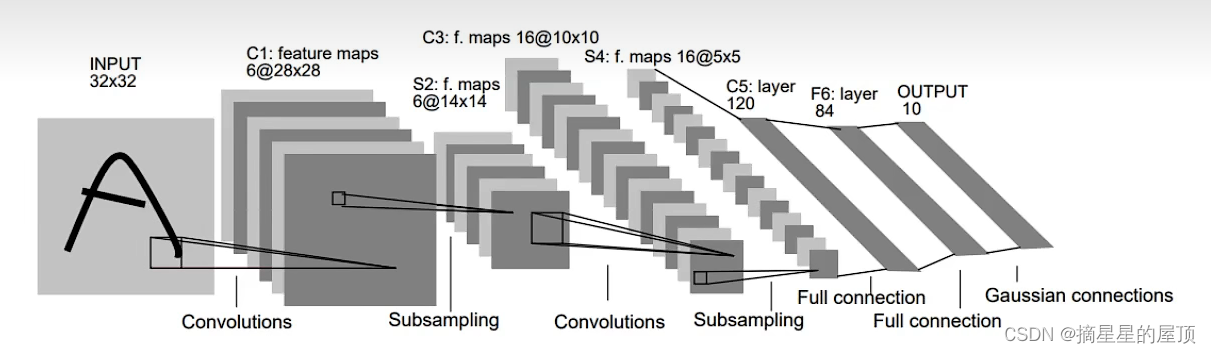
LeNet是具有代表性的CNN,在1998年被提出,是进行手写数字识别的网络,是其他深度学习网络模型的基础。如下图所示,它具有连狙的卷积层和池化层,最后经全连接层输出结果。
二、各层参数详解
2.1 INPUT层-输入层
数据input层,输入图像的尺寸为:32*32大小的一维一通道图片。
注意:①灰度图像是单通道图像,其中每个像素只携带有关光强度的信息;
②RGB图像是彩色图像,为三通道图像;
③传统上输入层不被视为网络层次结构之一,因此输入层不算LeNet的网络结构。
2.2 C1层-卷积层
输入数据(输入特征图input feature map):32*32
卷积核大小:5*5
计算公式:
;
其中,
是指输入图片的高度;
是指输入图片的宽度;
是指卷积核的大小;padding是指向图片外面补边,默认为0;S是指步长,卷积核遍历图片的步长,默认为1。
卷积核种类(通道数):6
输出数据(输出特征图output feature map):28*28
2.3 S2层-池化层(下采样层)
池化是缩小高、长方向上的空间的运算。
输入数据:28*28
采样区域:2*2
采样种类(通道数):6
输出数据:14*14
注意:①经过池化运算,输入数据和输出数据的通道数不会发生变化。
②此时,S2中每个特征图的大小是C1中每个特征图大小的1/4.
2.4 C3层-卷积层
输入数据:S2中所有6个或者几个特征map组合
卷积核大小:5*5
卷积核种类(通道数):16
输出数据(输出特征图output feature map):10*10
注意:C3中的每个特征map是连接到S2中的所有6个或者几个特征map的,表示本层的特征map是上一层提取到的特征map的不同组合。
2.5 S4层-池化层(下采样层)
输入数据:10*10
采样区域:2*2
采样种类(通道数):16
输出数据:5*5
2.6 C5层-卷积层
输入数据:S4层的全部16个单元特征map(与s4全相连)
卷积核大小:5*5
卷积核种类(通道数):120
输出数据(输出特征图output feature map):1*1
2.7 F6层-全连接层
输入数据:120维向量
输出数据:84维向量
2.2 Output层-全连接层
输入数据:84维向量
输出数据:10维向量
三、代码实现(采用的激活函数为relu函数)
3.1 搭建网络框架
(1)导包:
import torch
import torch.nn as nn
import torch.nn.functional as F(2)定义卷积神经网络:由于训练数据采用的是彩色图片(三通道),因此与上面介绍的通道数有出入。
class Net(nn.Module):
def __init__(self):
super(Net,self).__init__()
self.conv1 = nn.Conv2d(3,6,5)
self.conv2 = nn.Conv2d(6,16,5)
self.fc1 = nn.Linear(16*5*5,120)
self.fc2 = nn.Linear(120,84)
self.fc3 = nn.Linear(84,10)
def forward(self,x):
x = self.conv1(x)
x = F.relu(x)
x = F.max_pool2d(x,(2,2))
x = F.max_pool2d(F.relu(self.conv2(x)),2)
x = x.view(-1,x.size()[1:].numel())
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x(3)测试网络效果:相当于打印初始化部分
net = Net()
print(net)3.2 定义数据集
(1)导包:
import torchvision
import torchvision.transforms as transforms(2)下载数据集:
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5))
])
trainset = torchvision.datasets.CIFAR10(root='./data',train=True,download=True,transform=transform)
testset = torchvision.datasets.CIFAR10(root='./data',train=False,download=True,transform=transform)
trainloader = torch.utils.data.DataLoader(trainset,batch_size=4,shuffle=True,num_workers=0)
testloader = torch.utils.data.DataLoader(testset,batch_size=4,shuffle=False,num_workers=0)(3)定义元组:进行类别名的中文转换
classes = ('airplane','automobile','bird','car','deer','dog','frog','horse','ship','truck')(4)运行数据加载器:使用绘图函数查看数据加载效果
import matplotlib.pyplot as plt
import numpy as np
def imshow(img):
img = img / 2 + 0.5
npimg = img.numpy()
plt.imshow(np.transpose(npimg,(1,2,0)))
plt.show()
dataiter = iter(trainloader)
images,labels = dataiter.next()
imshow(torchvision.utils.make_grid(images))
print(labels)
print(labels[0],classes[labels[0]])
print(' '.join(classes[labels[j]] for j in range(4)))3.3 定义损失函数与优化器
(1)定义损失函数:交叉熵损失函数
criterion = nn.CrossEntropyLoss()(2)定义优化器:让网络进行更新,不断更新好的参数,达到更好的效果
import torch.optim as optim
optimizer = optim.SGD(net.parameters(),lr=0.001,momentum=0.9)3.4 训练网络
for epoch in range(2):
running_loss = 0.0
for i,data in enumerate(trainloader,0):
inputs,labels = data
optimizer.zero_grad()
outputs = net(inputs)
loss = criterion(outputs,labels)
loss.backward()
optimizer.step()
running_loss += loss.item()
if i % 2000 == 1999:
print('[%d,%5d] loss:%.3f' % (epoch + 1,i+1,running_loss/2000))
running_loss = 0.0
print("Finish")3.5 测试网络
(1)保存学习好的网络参数:将权重文件保存到本地
PATH='./cifar_net.pth'
torch.save(net.state_dict(),PATH)(2) 测试一组图片的训练效果
dataiter = iter(testloader)
images,labels = dataiter.next()
imshow(torchvision.utils.make_grid(images))
print('GroundTruth:',' '.join('%5s'% classes[labels[j]] for j in range(4)))(3)观察整个训练集的测试效果
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images,labels = data
outputs = net(images)
_,predicted = torch.max(outputs,1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
correctGailv = 100*(correct / total)
print(correctGailv)四、小结
与“目前的CNN”相比,LeNet有以下几个不同点:
①激活函数不同:LeNet使用sigmoid函数,而目前的CNN中主要使用ReLU函数;
②原始的LeNet中使用子采样(subsampling)缩小中间数据的大小,而目前的CNN中Max池化是主流。
参考:LeNet详解-CSDN博客


![[资源推荐]看到一篇关于agent的好文章](https://img-blog.csdnimg.cn/de6aaa3e8194476dbff5a02647131af2.png)