【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
rviz作为很好的上位机调试工具,它本身可以显示很多的传感器数据。比如说lidar、map、tf、camera、点云这些,在rviz上面显示都没有问题。但是有一些数据,我们其实是希望进行自定义显示的。以slam来讲,目前常见的slam就是激光slam和视觉slam。不管哪一种slam,环境的自然特征总没有人工设计的强特征来的稳定,激光slam的稳定特征就是反光柱,而视觉slam的稳定特征就是二维码。但是可惜的是,rviz本身并不支持反光柱的显示和二维码的显示,所以我们完全有必要通过自定义的方法来达成这一目的。

1、rviz的显示方法
实现的基本方法也是通过编程来实现的。主要是通过visualization_msgs::Marker消息的方法来实现rviz的自定义显示。等Marker定义好了之后,就可以通过marker_pub发布出去。rviz收到这个发布的消息之后,接着就可以在图形界面上显示出来。
2、示例代码basic_shapes.cpp
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
int main( int argc, char** argv )
{
ros::init(argc, argv, "basic_shapes");
ros::NodeHandle n;
ros::Rate r(1);
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 1);
// Set our initial shape type to be a cube
uint32_t shape = visualization_msgs::Marker::CUBE;
while (ros::ok())
{
visualization_msgs::Marker marker;
// Set the frame ID and timestamp. See the TF tutorials for information on these.
marker.header.frame_id = "my_frame";
marker.header.stamp = ros::Time::now();
// Set the namespace and id for this marker. This serves to create a unique ID
// Any marker sent with the same namespace and id will overwrite the old one
marker.ns = "basic_shapes";
marker.id = 0;
// Set the marker type. Initially this is CUBE, and cycles between that and SPHERE, ARROW, and CYLINDER
marker.type = shape;
// Set the marker action. Options are ADD, DELETE, and new in ROS Indigo: 3 (DELETEALL)
marker.action = visualization_msgs::Marker::ADD;
// Set the pose of the marker. This is a full 6DOF pose relative to the frame/time specified in the header
marker.pose.position.x = 0;
marker.pose.position.y = 0;
marker.pose.position.z = 0;
marker.pose.orientation.x = 0.0;
marker.pose.orientation.y = 0.0;
marker.pose.orientation.z = 0.0;
marker.pose.orientation.w = 1.0;
// Set the scale of the marker -- 1x1x1 here means 1m on a side
marker.scale.x = 1.0;
marker.scale.y = 1.0;
marker.scale.z = 1.0;
// Set the color -- be sure to set alpha to something non-zero!
marker.color.r = 0.0f;
marker.color.g = 1.0f;
marker.color.b = 0.0f;
marker.color.a = 1.0;
marker.lifetime = ros::Duration();
// Publish the marker
while (marker_pub.getNumSubscribers() < 1)
{
if (!ros::ok())
{
return 0;
}
ROS_WARN_ONCE("Please create a subscriber to the marker");
sleep(1);
}
marker_pub.publish(marker);
// Cycle between different shapes
switch (shape)
{
case visualization_msgs::Marker::CUBE:
shape = visualization_msgs::Marker::SPHERE;
break;
case visualization_msgs::Marker::SPHERE:
shape = visualization_msgs::Marker::ARROW;
break;
case visualization_msgs::Marker::ARROW:
shape = visualization_msgs::Marker::CYLINDER;
break;
case visualization_msgs::Marker::CYLINDER:
shape = visualization_msgs::Marker::CUBE;
break;
default:
break;
}
r.sleep();
}
}代码的内容比较简单,就是定义显示一种形状。当然,这种现实纯属于demo性质。实际应用的时候,我们一般会设置固定的形状和大小。并且在状态发生改变的时候,这种形状的颜色,有可能发生改变。
需要注意的是,很多网上demo中frame_id都修改成了/my_frame,这是不对的。正确的做法应该是my_frame,没有前面的/。不然rviz有可能显示不出来效果。
3、添加编译脚本
add_executable(basic_shapes src/basic_shapes.cpp)
target_link_libraries(basic_shapes ${catkin_LIBRARIES})
add_dependencies(basic_shapes beginner_tutorials_generate_messages_cpp)
4、编译方法
编译比较简单,就是在workspace的顶层输入catkin_make即可。
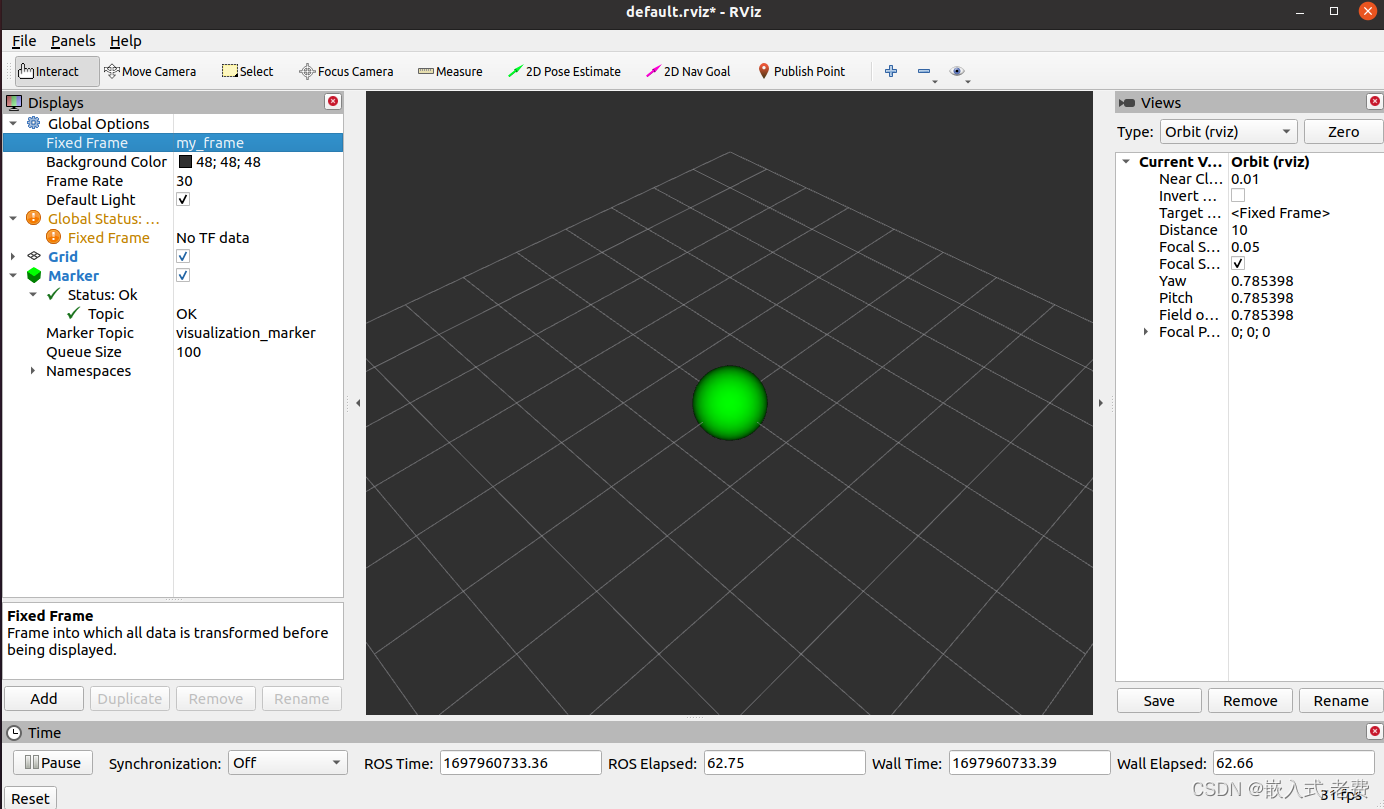
5、开始测试
测试的方法也不复杂。主要过程分成三步来做。第一步,输入roscore;第二步,直接输入rosrun beginner_tutorials basic_shapes;第三步,输入rosrun rviz rviz。把fixed frame设置成my_frame之后,再添加一个Marker,基本上就可以看到我们想看的效果了。