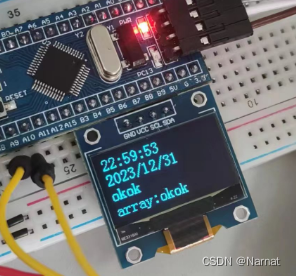
由手机向蓝牙模块传输时间信息,Stm32获取信息并将已存在信息修改为传入信息
测试代码:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
uint16_t num = 0;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
char News[100] = "";
uint8_t flag = 1;
/*初始化通用定时器TIM2*/
void Timer_Init(void){
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//APB1外设开启
TIM_InternalClockConfig(TIM2);//选择内部时钟
/*初始化时基单元*/
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1;//ARR自动重装
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1;//psc预分频器
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//高级计时器内容直接给零
//记录1s
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);//刚初始化完就会进中断
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//消除中断标志位
//使能更新中断
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
/*配置中断*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//选择组2
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//定时器2在NVIC内的通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);//启动定时器
}
unsigned char time[] = {22, 59, 30};
unsigned int date[] = {2023, 12, 31};
char month[] = {0, 31, 28, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31};
void Show_Time(void){
OLED_ShowNum(1,1,time[0], 2);
OLED_ShowString(1, 3, ":");
OLED_ShowNum(1,4,time[1], 2);
OLED_ShowString(1, 6, ":");
OLED_ShowNum(1,7,time[2], 2);
}
void Show_Date(void){
OLED_ShowNum(2,1,date[0], 4);
OLED_ShowString(2, 5, "/");
OLED_ShowNum(2,6,date[1], 2);
OLED_ShowString(2, 8, "/");
OLED_ShowNum(2,9,date[2], 2);
}
void Time_Control(void){
time[2] = time[2] + 1;
if(time[2] >= 60){
time[2] = 0;
time[1] = time[1] + 1;
if(time[1] >= 60){
time[1] = 0;
time[0] = time[0] + 1;
if(time[0] >= 24){
time[0] = 0;
date[2] = date[2] + 1;
if(date[2] >= month[date[1]] + 1){
date[2] = 1;
date[1] = date[1] + 1;
if(date[1] >= 13){
date[1] = 1;
date[0] = date[0] + 1;
if(date[0] >= 9999){
date[0] = 2023;
}
}
}
}
}
}
}
void TIM2_IRQHandler(void){//定时器2的中断函数,名字固定
if(TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);//清除标志位
Time_Control();
}
}
void month2_Control(void){//判别闰平年
if((date[0] % 4 == 0 && date[0] % 100 != 0 )|| date[0] % 400 == 0) month[2] = 29;
else month[2] = 28;
}
void Get_Hc05News(void){
uint32_t i = 0, j = 0;
while(j < 10000){//等待中断
while(Serial_GetRxFlag() == 1){//查看标志位并清除
News[i] = Serial_GetRxData();//传入数据
i ++;
j = 0;
flag = 0;//标志传入了新数据
}
j ++;
}
}
void Array_NewsClear(void){//恢复数组初始化
uint16_t i = 0;
for(i = 0; i < 100; i ++) News[i] = '\0';
}
uint8_t StringLength(char * a){//计算数组长度函数
uint8_t length = 0;
uint8_t i = 0;
while(a[i] != '\0'){
i ++;
length ++;
}
return length;
}
uint8_t Check(char *a, uint8_t length){
if(length == 5 | length == 10){
return 1;
}
return 0;
}
int main(void){
OLED_Init();//初始化OLED
Timer_Init();//开启计时器
Serial_Init();//开启串口
while(1){
Get_Hc05News();//时刻等待蓝牙传入数据
if(flag == 0){//蓝牙传入了数据
//恢复标志位
if(Check(News, StringLength(News)) == 1){//若查看数据没有错误
OLED_ShowString(3, 1, "TRUE");
OLED_ShowString(4, 1, News);
Array_NewsClear();
}
else{
OLED_ShowString(3, 1, "FALSE");
OLED_ShowString(4, 1, News);
Array_NewsClear();
}
flag = 1;
}
}
}
目前遇到的主要问题是OLED显示数字需要耗费时间,导致蓝牙模块传入信息不能及时抢占CPU导致数据漏传入,解决方法是修改蓝牙模块中断为更高级中断
—— 2023/10/15
为了解决上述问题首先要将蓝牙传数据模块的中断抢占优先级调高,这是为了防止计数器中断与其抢CPU
//将串口|蓝牙模块中断抢占优先级设置为3
NVIC_InitStructur.NVIC_IRQChannelPreemptionPriority = 3;
NVIC_InitStructur.NVIC_IRQChannelSubPriority = 1;
调整之后传输数据,明显丢包率小了许多,但仍有数据丢失
原因在于主程序,程序在未执行到if语句的时候是不会接受数据的
while(1){
if(Serial_GetRxFlag() == 1){
News = Serial_returnNews();
Delay_ms(100);
OLED_ShowString(3, 1, News);
Serial_RESETI();
free(News);//释放空间必须释放否者发生地址紊乱,直接卡机
}
Time_Show(time);
Time_Show_Date(date);
}
但主程序又不能只执行这一个if语句
那么突破口在哪里呢?我又想到数据传输在蓝牙模块的中断函数里,这个函数很鸡肋每次只能接受一个字节,那么为何不能让他把所有数据都一次性接收呢!这就是突破口。
将数据都存入数组里
void USART1_IRQHandler(void)//中断函数
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
news[I] = USART_ReceiveData(USART1);//读数据
Serial_RxFlag = 1;//至标志位为有数据
I ++;
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
这样就不用被动等待主函数里执行到if语句再一个一个接受数据了!
还需要攻克的难题是如何将此数组返回至主函数
这里创建动态数组返回
char * Serial_returnNews(void){//返还一个数组
char * array;
uint8_t i = 0;
array = (char *) malloc(sizeof(char) * 100);
while(news[i] != '\0'){
array[i] = news[i];
i ++;
}
OLED_ShowString(4,1,"array:");
OLED_ShowString(4,7,array);
return array;
}
主函数用一个char指针接收
但新的诡异问题又出现了,数据接收很正确,但是再连续接受几次数据后程序直接卡死,这让我百思不得其解
问题出在没将创建的动态数组释放掉!!!传入数据导致这些数据占据了大量空间,导致Stm32地址不够用!!因为上述的返回数组函数没办法释放数组,但这不代表在主函数里就不用释放
至此手机向蓝牙传输信息给Stm32的问题全部解决
全部工程代码:
main.c://主函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "Time.h"
#include "Function.h"
#include <stdio.h>
#include <stdlib.h>
char *News = NULL;//存数据
//uint8_t flag = 1;//标志位
unsigned char time[] = {22, 59, 30};
unsigned int date[] = {2023, 12, 31};
char month[] = {0, 31, 28, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31};
void TIM2_IRQHandler(void){//定时器2
//主要运用时间更新
if(TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);//清除标志位
Time_Control(time, month, date);
}
}
int main(void){
OLED_Init();//初始化OLED
Time_Init();//开启计时器
Serial_Init();//开启串口
while(1){
if(Serial_GetRxFlag() == 1){
News = Serial_returnNews();
Delay_ms(100);//等待数据传输完
OLED_ShowString(3, 1, News);
Serial_RESETI();
free(News);//释放空间必须释放否者发生地址紊乱,直接卡机
}
Time_Show(time);
Time_Show_Date(date);
}
}
Serial.c://串口初始化及传输数据函数等函数
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
#include "Delay.h"
#include <stdlib.h>
#include "OLED.h"
uint8_t Serial_RxData;//存数据
uint8_t Serial_RxFlag;//标志位
GPIO_InitTypeDef GPIO_InitStructu;//GPIO
USART_InitTypeDef USART_InitStructure;//串口
NVIC_InitTypeDef NVIC_InitStructur;//中断
//extern uint8_t flag;//全局定义
char news[100] = "";//存数据
uint8_t I = 0;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructu.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructu.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructu.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructu);
GPIO_InitStructu.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructu.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructu.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructu);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//通道
NVIC_InitStructur.NVIC_IRQChannel = USART1_IRQn;//中断通道
NVIC_InitStructur.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructur.NVIC_IRQChannelPreemptionPriority = 3;
NVIC_InitStructur.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructur);
USART_Cmd(USART1, ENABLE);
}
uint8_t Serial_GetRxFlag(void)//读取标志位后自动青除
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
void Serial_GetRxFlag_SET(void){
Serial_RxFlag = 1;
}
uint8_t Serial_GetRxData(void)//返回一个字节
{
return Serial_RxData;
}
/*void Serial_GetNews(char *News){
uint32_t i = 0, j = 0;
while(j < 10000){//等待中断
while(Serial_GetRxFlag() == 1){//查看标志位并清除
News[i] = Serial_GetRxData();//传入数据
i ++;
j = 0;
flag = 0;//标志传入了新数据
}
j ++;
}
}
*/
char * Serial_returnNews(void){//返还一个数组
char * array;
uint8_t i = 0;
array = (char *) malloc(sizeof(char) * 100);
while(news[i] != '\0'){
array[i] = news[i];
i ++;
}
OLED_ShowString(4,1,"array:");
OLED_ShowString(4,7,array);
return array;
}
void Serial_RESETI(void){//初始化I
I = 0;
}
void USART1_IRQHandler(void)//中断函数
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
news[I] = USART_ReceiveData(USART1);//读数据
Serial_RxFlag = 1;//至标志位为有数据
I ++;
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
Serial.h:
#ifndef __SERIAL_H
#define __SERIAL_H
#include "stm32f10x.h"
#include <stdio.h>
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
uint8_t Serial_GetRxFlag(void);
uint8_t Serial_GetRxData(void);
void Serial_GetRxFlag_SET(void);
//void Serial_GetNews(char *News);
char * Serial_returnNews(void);
void Serial_RESETI(void);
#endif
Time.c://计数器初始化,及显示时间日期等函数
#include "stm32f10x.h"
#include "OLED.h"
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/*初始化通用定时器TIM2*/
void Time_Init(void){
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//APB1外设开启
TIM_InternalClockConfig(TIM2);//选择内部时钟
/*初始化时基单元*/
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1;//ARR自动重装
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1;//psc预分频器
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//高级计时器内容直接给零
//记录1s
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);//刚初始化完就会进中断
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//消除中断标志位
//使能更新中断
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
/*配置中断*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//选择组2
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//定时器2在NVIC内的通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);//启动定时器
}
void Time_Control(unsigned char *time, char *month, unsigned int *date){//更新时间
time[2] = time[2] + 1;
if(time[2] >= 60){
time[2] = 0;
time[1] = time[1] + 1;
if(time[1] >= 60){
time[1] = 0;
time[0] = time[0] + 1;
if(time[0] >= 24){
time[0] = 0;
date[2] = date[2] + 1;
if(date[2] >= month[date[1]] + 1){
date[2] = 1;
date[1] = date[1] + 1;
if(date[1] >= 13){
date[1] = 1;
date[0] = date[0] + 1;
if(date[0] >= 9999){
date[0] = 2023;
}
}
}
}
}
}
}
void Time_month2_Control(char *month,unsigned int *date){//判别闰平年
if((date[0] % 4 == 0 && date[0] % 100 != 0 )|| date[0] % 400 == 0) month[2] = 29;
else month[2] = 28;
}
void Time_Show(unsigned char *time){
OLED_ShowNum(1,1,time[0], 2);
OLED_ShowString(1, 3, ":");
OLED_ShowNum(1,4,time[1], 2);
OLED_ShowString(1, 6, ":");
OLED_ShowNum(1,7,time[2], 2);
}
void Time_Show_Date(unsigned int *date){
OLED_ShowNum(2,1,date[0], 4);
OLED_ShowString(2, 5, "/");
OLED_ShowNum(2,6,date[1], 2);
OLED_ShowString(2, 8, "/");
OLED_ShowNum(2,9,date[2], 2);
}
Time.h:
//显示时间&日期
#ifndef __TIME_H
#define __TIME_H
#include "stm32f10x.h"
#include <stdio.h>
void Time_Init(void);
void Time_Control(unsigned char *time, char *month, unsigned int *date);
void Time_month2_Control(char *month,unsigned int *date);
void Time_Show(unsigned char *time);
void Time_Show_Date(unsigned int *date);
#endif
Function.c://需要用到的一些其他函数
#include "stm32f10x.h"
//一些函数的实现
void Function_ArrayClear(char *News){//恢复数组初始化
uint16_t i = 0;
for(i = 0; i < 100; i ++) News[i] = '\0';
}
uint8_t Function_ArrayLength(char * a){//计算数组长度函数
uint8_t length = 0;
uint8_t i = 0;
while(a[i] != '\0'){
i ++;
length ++;
}
return length;
}
uint8_t Check(char *a, uint8_t length){//查数据长度是否符合条件
if(length == 5 | length == 10){
return 1;
}
return 0;
}
Function.h:
#ifndef __FUNCTION_H
#define __FUNCTION_H
#include "stm32f10x.h"
#include <stdio.h>
void Function_ArrayClear(char *News);
uint8_t Function_ArrayLength(char * a);
uint8_t Check(char *a, uint8_t length);
#endif
总体效果:
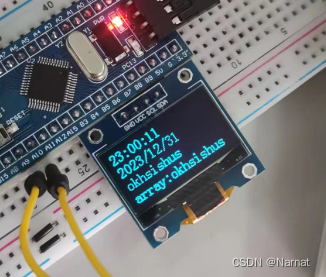
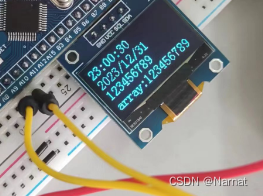
—— 2023/10/16