目录
1.IOU loss
2.GIOU
3.DIOU和CIOU
5.SIOU
6.EIOU
7.WIOU
8.MPDIOU
别人问目标检测有几个损失函数?
我答:三个。
别人笑了笑。
我问:难道我说记错了?
别人说:是的,你记错了。
我说:哦。
经常糊里糊涂的我竟然没有反驳。
今天就理一理yolov5的损失,并重点讲一下其中的位置损失。
------------------------
yolov5有三个损失函数:分类损失,位置损失,置信度损失
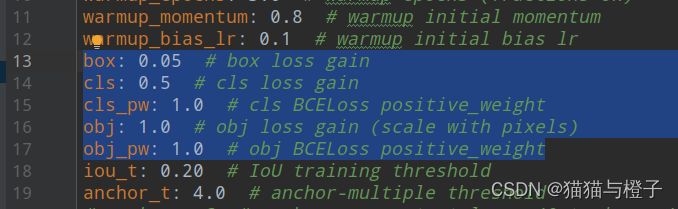
总体的损失为以上三者的加权相加,通过改变权值可以调整三者损失的关注度。
证据:utils/loss.py line240

其中的参数设置:
data/hyps/hyp.scratch.yml
分类损失:
通常对于分类任务,输出的标签是互斥的。yolov5中是对每一个类别预测结果使用二元交叉损失。
位置损失:
边界框预测是目标检测中最主要的任务之一,目标检测中想要框出检测到的目标,就需要通过对边界框所在位置数据的预测。
目标损失:
使用交叉熵损失作为目标损失,有效的区分背景和前景;
--------------------
对于位置损失,目前的发展顺序:
IOU -》DIOU -》CIOU -》SIOU -》EIOU -》WIOU -》MPDIOU
1.IOU loss
论文:《UnitBox: An Advanced Object Detection Network》
链接:https://arxiv.org/pdf/1608.01471.pdf
之前用的回归损失存在问题:
但该方式还存在两个问题(来自论文《Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression》中的观点,https://arxiv.org/pdf/1902.09630.pdf):
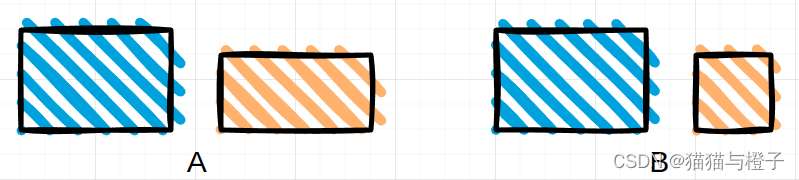
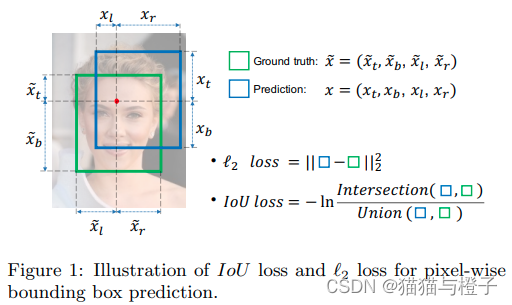
1.a图和b图中2图都没有重叠,但是使用l2loss无法反应出A和B之间的距离(C与D之间的距离);
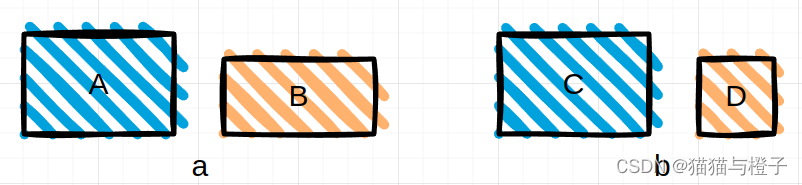
2.预测框与gt框之间不能完全反映重叠度的好坏。
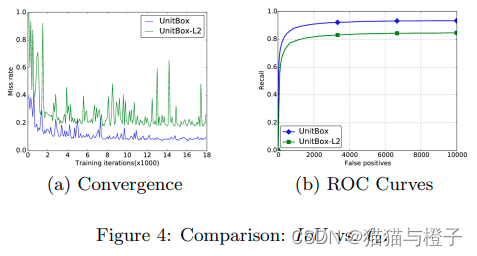
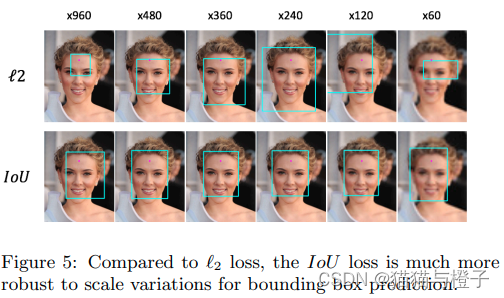
iou loss相比于l2 loss收敛性更好,ROC曲线指标也更好(参考:https://arxiv.org/pdf/1608.01471.pdf)
该方法存在缺陷:
1.当真实框和预测框完全不重叠时,因为其损失都为 1,则无法反映预测框离真实框的远近;
2.当真实框包含预测框,且真实框与预测框的大小固定时,其 IoU 很定为预测框与真实框面积的比值,则无论预测框在真实框中的哪个位置,损失都不变。
2.GIOU
论文: 《Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression》
链接:https://arxiv.org/pdf/1902.09630.pdf
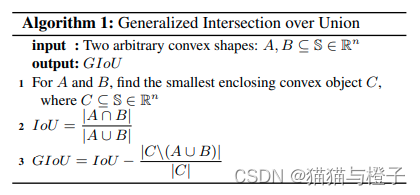
其中C就是包含两个框的最小矩形外框,GIOU计算中分子表示C中除了A和B并集的剩下部分。
损失函数:
3.DIOU和CIOU
论文:《Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression》
链接:https://arxiv.org/pdf/1911.08287.pdf
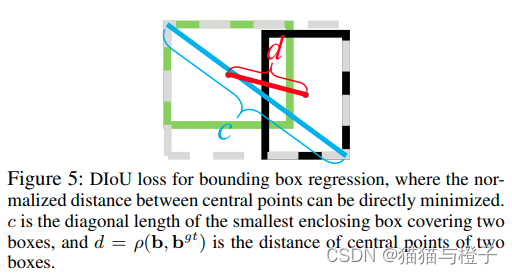
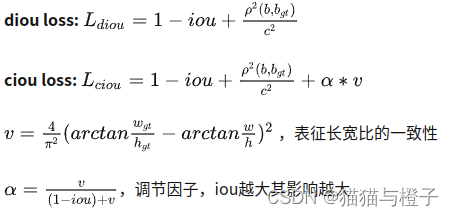
作者认为好的检测回归损失应该需要考虑三个方面:预测框和GT框的重叠度、预测框和GT框的中心点距离、预测框和GT框各自的长宽比一致性。于是在iou loss的基础上提出了DIOU loss:引入了预测框和GT框中心点的距离。在DIOU loss的基础上提出了CIOU loss:引入了预测框的长宽比和GT框的长宽比。
损失函数:
将检测框和GT框之间的中心距离加入loss可以在两框不想交的时候指引预测。解决了大框包小框时的问题:
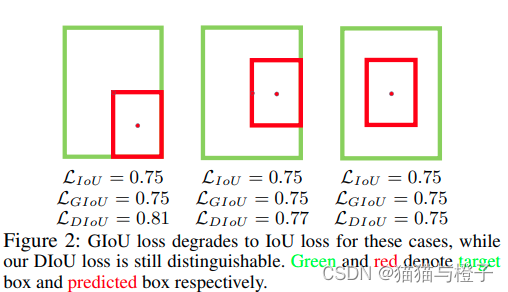
第三种类型的图,iou中加入了中心距离后,得到的DIOU的loss最小,这是很合理的。
作者将diou加入到nms替换iou,当中心点距离近到一定范围的多数情况下表示的是同一个目标,而中心点距离过远即使二者iou超过阈值有可能是遮挡和被遮挡的两个目标。如下图:
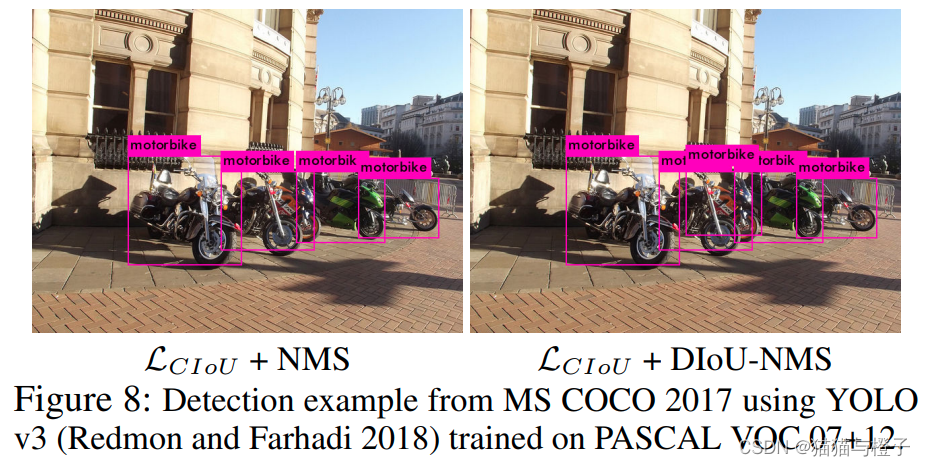
上图中,采用diou nms将被遮挡的目标释放出来了。
5.SIOU
论文:《SIoU Loss: More Powerful Learning for Bounding Box Regression Zhora Gevorgyan》
链接:https://arxiv.org/pdf/2205.12740.pdf
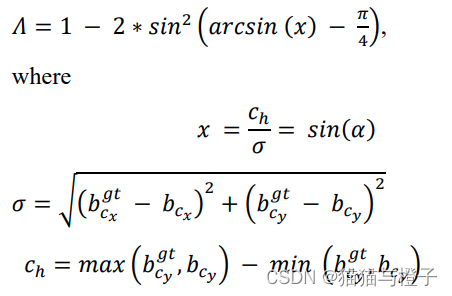
SIOU在考虑重叠区域,距离和长宽,还考虑了2个框的角度问题。当预测框和真实框不想交时,如何加快收敛速度,作者认为真实框与预测框框之间的方向,导致收敛速度较慢,角度损失定义如下:
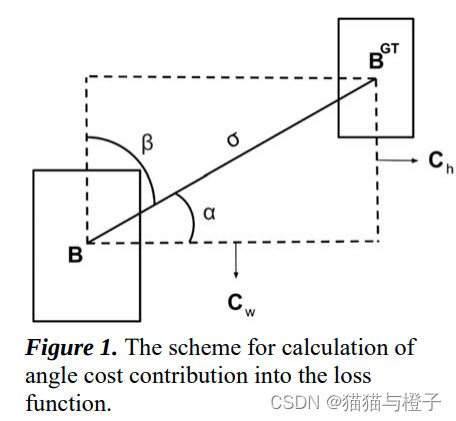
Ch为真实框和预测框中心点的高度差,δ为真实框和预测框中心点的距离。
为真实框中心坐标
为预测框中心坐标,可以注意到当
为
或0时,在训练过程中若
,则最小化
,否则最小化
。
距离代价(Distance cost):考虑GT框和预测框之间的距离
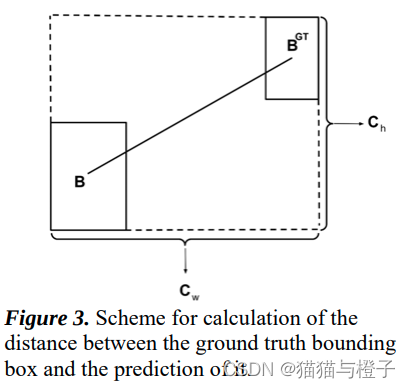
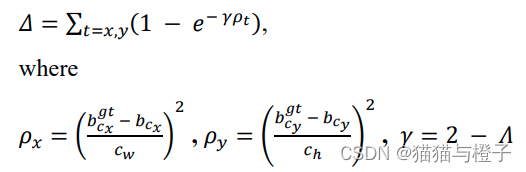
在计算Λ时,当两个框近乎平行的时候,Λ趋近于0,这样计算出来两框之间的角度距离接近0,此时γ的值接近2,则两框之间的距离对于整体loss贡献变少。当两个框的角度在45时,Λ趋近于1,此时γ的值接近1,则两框之间的距离应该被重视,需要占更多的loss。
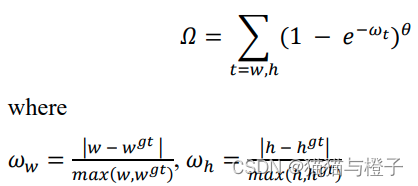
形状代价(Shape cost):考虑两个框之间的长宽比,是通过计算两框之间的宽只差和两个框之间最大宽之比来定义的。
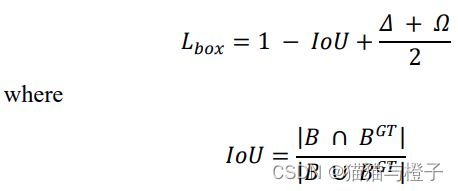
重叠区域考虑:重叠区域考虑其实就是普通的IOU。
最后的整体loss公式:
6.EIOU
论文:《Focal and Efficient IOU Loss for Accurate Bounding Box Regression》
链接:https://arxiv.org/pdf/2101.08158.pdf
作者认为ciou loss对于长宽比的加入loss的设计不太合理,于是将ciou loss中反应长宽比一致性的部分替换成了分别对于长和宽的一致性loss,形成了eiou loss;其次,大多数损失函数忽略了正负样本不平衡的问题,即大量与目标框重叠面积较小的预测框在最终的 bbox 优化中占用了绝大部分的贡献。
公式定义:

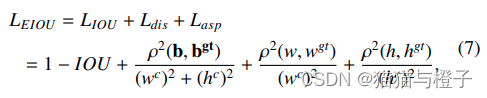
其中,Wc和hc是预测边界框与真实框的最小外接矩形的宽度和高度,p是两点之间的欧氏距离。
7.WIOU
论文:《Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism》 论文链接:https://arxiv.org/pdf/2301.10051.pdf
使用IOU损失的时候,当边界框没有重叠的时候,反向传播的梯度消失了。本文就是解决这个问题。

作者考虑使用构造了惩罚项Ri来解决这个问题。加入惩罚项的公式:

DIOU将惩罚项定义为中心点连接的归一化长度:

EIoU 在此基础上加大了对距离度量的惩罚力度,其惩罚项定义为:

Complete-IOU
在RDIOU的基础上,CIOU增加了对纵横比一致性的考虑:
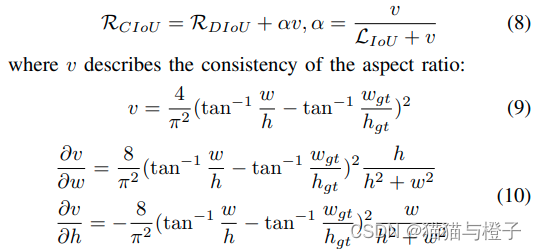
其中反向传播的梯度满足
,也就是v不可能为预测框的宽高提供同号的梯度。在前文对DIoU的分析中可知DIoU会产生负梯度
,当这个负梯度与
正好抵消时,会导致预测框无法优化。而CIoU对纵横比一致性的可以优化该问题。
(略,后续补充完整)... ...
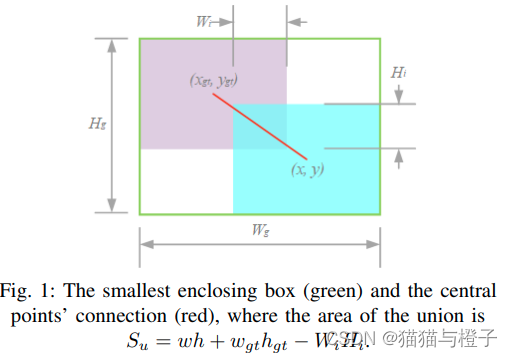
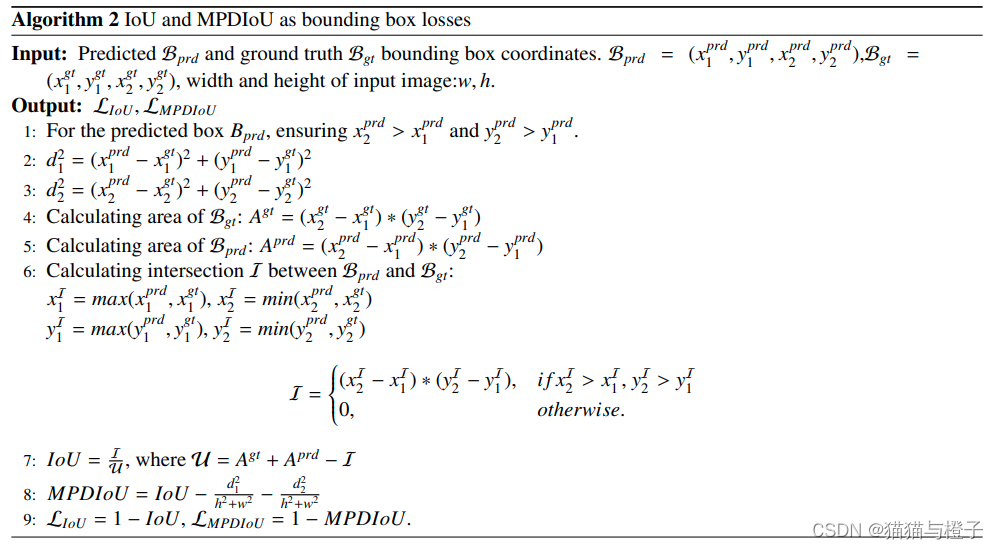
8.MPDIOU
论文:《MPDIoU: A Loss for Efficient and Accurate Bounding Box Regression》
链接:https://arxiv.org/pdf/2307.07662.pdf
目的:大多数的边界框回归损失函数在不同预测结果下具有相同的值,这降低了边界框回归的收敛速度和准确性。
所以作者提出了以下的算法:
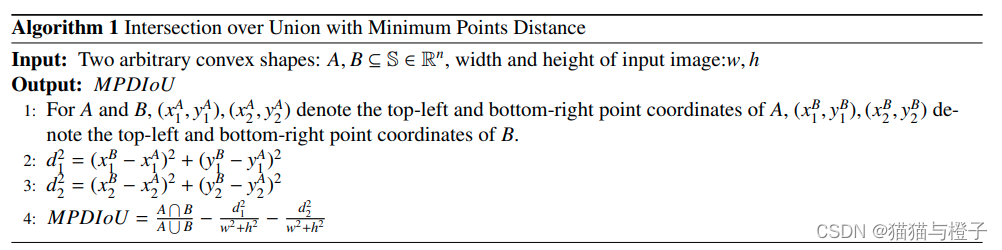
def bbox_mpdiou(box1, box2, x1y1x2y2=True, mpdiou_hw=None, grid=None, eps=1e-7):
# Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
box2 = box2.T
box1[:2] += grid
box2[:2] += grid
# Get the coordinates of bounding boxes
if x1y1x2y2: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
else: # transform from xywh to xyxy
b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
# Intersection area
inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
# Union Area
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
union = w1 * h1 + w2 * h2 - inter + eps
iou = inter / union
d1 = (b2_x1 - b1_x1) ** 2 + (b2_y1 - b1_y1) ** 2
d2 = (b2_x2 - b1_x2) ** 2 + (b2_y2 - b1_y2) ** 2
return iou - d1 / mpdiou_hw - d2 / mpdiou_hw # MPDIoU注:以上是部分信息记录,没有详细讲述,不喜勿喷。

![[vxe-table] 合并行后滚动错位](https://img-blog.csdnimg.cn/f0313c53766d4c5cba84fb8da6562392.png)