噪声
1 噪声定义
噪声是电路或系统中不含信息量的电压或电流。在工业与自然界中,存在着各种干扰源(噪声源),如大功率电力电子器件的接入、大功率用电设备的开启与断开、雷击闪电等都会使空间电场和磁场产生有序或无序的变化,这些都是干扰源(或噪声源)。这些源产生的电磁波或尖峰脉冲通过磁、电耦合或是通过电源线等路径进入放大电路,各种电气设备,形成各种形式的干扰。
2 深度学习及机器学习等算法中的噪声
深度学习和机器学习中的噪声指的是数据中的不确定性、随机性或错误,它是一种对于信息的干扰,使得模型的性能受到影响。这种噪声可以来自多个来源,包括但不限于:
-
测量噪声: 在数据收集过程中,传感器或测量设备可能引入误差,导致数据中存在噪声。例如,温度传感器的精度有限,可能会引入温度测量的误差。
-
标签噪声: 在监督学习中,标签(Ground Truth)的质量可能不高,标签错误或不一致会引入噪声。这在人工标记数据时很常见。
-
环境噪声: 数据采集时的环境条件可能不稳定,如图像拍摄时的光线变化或声音录制时的背景噪声。
-
数据不平衡: 数据集中不同类别的样本数量不均衡可能会引入偏见,使得模型在少数类别上性能较差。
-
随机性: 一些机器学习算法中使用了随机性,例如随机初始化权重,这可以在模型训练中引入随机性。
深度学习和机器学习算法的目标是尽可能减小噪声的影响,以提高模型的稳健性和性能。处理噪声的方法包括数据清洗、特征工程、模型正则化、集成学习等。减小噪声有助于提高模型的泛化能力,使其在未见过的数据上表现更好。
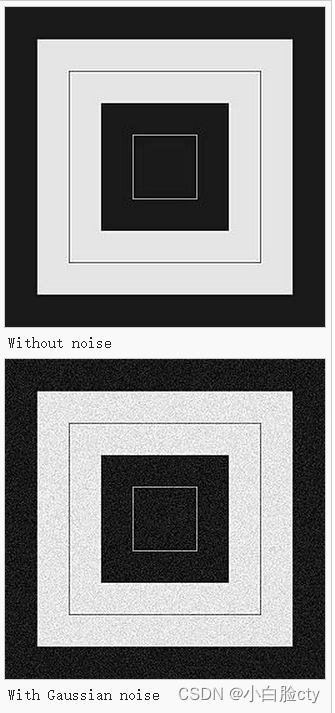
3 高斯噪声
3.1 高斯噪声定义
高斯噪声是指它的概率密度函数服从高斯分布(即正态分布)的一类噪声。如果一个噪声,它的幅度分布服从高斯分布,而它的功率谱密度又是均匀分布的,则称它为高斯白噪声。
高斯白噪声的二阶矩不相关,一阶矩为常数,是指先后信号在时间上的相关性。高斯白噪声包括热噪声和散粒噪声。在通信信道测试和建模中,高斯噪声被用作加性白噪声以产生加性白高斯噪声。
在电信和计算机网络中,通信信道可能受到来自许多自然源的宽带高斯噪声的影响,例如导体中的原子的热振动(称为热噪声或约翰逊 - 奈奎斯特噪声),散粒噪声,来自地球和其他温暖的物体,以及来自太阳等天体。
高斯噪声在图像处理、信号处理和统计学等领域广泛应用。
3.2 数字图像的高斯噪声
在数字图像中的高斯噪声的主要来源出现在采集期间。 由于不良照明和/或高温引起的传感器噪声。在数字图像处理中,可以使用空间滤波器来降低高斯噪声,但是当对图像进行平滑时,结果可能导致精细缩放的图像边缘和细节的模糊,因为它们也对应于被阻挡的高频。 用于噪声去除的常规空间滤波技术包括:平均(卷积)滤波,中值滤波和高斯平滑。
3.3 高斯噪声的抑制
在电子技术测控系统中,对干扰与噪声抑制方法主要有屏蔽、合理接地、隔离、合理布线、净化电源、滤波、采用专用器件等等措施。
除了采用通用的噪声抑制方法外,对高斯噪声的抑制方法常常采用数理统计方法。
3.4 高斯噪声的应用
高斯噪声常常用于模拟数据中的噪声干扰,例如在机器学习中,它可以被添加到训练数据中以测试算法的鲁棒性。此外,在信号处理、图像处理和统计分析中,高斯噪声也经常出现,并需要采取相应的方法来处理或消除其影响。
算法的鲁棒性
算法的鲁棒性是指算法在面对各种不确定性、异常情况、噪声或攻击时的稳定性和可靠性。具体来说,鲁棒性是衡量算法在不完美或恶劣条件下执行的能力。这包括以下方面:
抗干扰能力: 鲁棒性衡量了算法在面对各种随机噪声、数据中的异常值、传感器误差等干扰因素时的表现。一个鲁棒的算法能够有效地处理这些干扰,而不会导致严重的错误或崩溃。
健壮性: 健壮性是鲁棒性的一部分,它强调算法对于输入数据的小偏差或轻微变化的稳定性。健壮的算法不会因为输入数据的微小变化而产生显著不同的输出。
防御性: 在安全领域,鲁棒性也包括算法对于恶意攻击的抵抗能力。这意味着算法能够检测和防止恶意输入或攻击,并保持其正常操作。
泛化能力: 在机器学习中,鲁棒性还涉及算法的泛化能力,即算法在未见过的数据上的性能表现。一个鲁棒的机器学习模型能够在新数据上表现良好,而不仅仅在训练数据上表现良好。
总之,算法的鲁棒性是确保算法在各种情况下都能可靠运行的重要特性,它有助于提高系统的稳定性、安全性和性能。鲁棒性的概念适用于各种领域,包括计算机科学、机器学习、数据分析和网络安全。




![[代码学习]einsum详解](https://img-blog.csdnimg.cn/2b2d39c35924425fb7f8f557d1a15f80.png#pic_center)