以下程序演示如何编写交互式ICP查看器。该程序将加载点云并对其进行刚性变换。之后,使用ICP算法将变换后的点云与原来的点云对齐。每次用户按下“空格”,进行ICP迭代,刷新可视化界面。
代码实现
资源准备 monkey.ply
#include <string>
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
#include <pcl/registration/icp.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/time.h>
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
bool next_iteration = false;
void print4x4Matrix(const Eigen::Matrix4d& matrix)
{
printf("Rotation matrix :\n");
printf(" | %6.3f %6.3f %6.3f | \n", matrix(0, 0), matrix(0, 1), matrix(0, 2));
printf("R = | %6.3f %6.3f %6.3f | \n", matrix(1, 0), matrix(1, 1), matrix(1, 2));
printf(" | %6.3f %6.3f %6.3f | \n", matrix(2, 0), matrix(2, 1), matrix(2, 2));
printf("Translation vector :\n");
printf("t = < %6.3f, %6.3f, %6.3f >\n\n", matrix(0, 3), matrix(1, 3), matrix(2, 3));
}
/**
* 此函数是查看器的回调。当查看器窗口位于顶部时,只要按任意键,就会调用此函数。如果碰到“空格”,将布尔值设置为true。
*/
void keyboardEventOccurred(const pcl::visualization::KeyboardEvent& event,void* nothing)
{
if (event.getKeySym() == "space" && event.keyDown())
next_iteration = true;
}
int main(int argc,char* argv[])
{
// 准备将使用的点云
PointCloudT::Ptr cloud_in(new PointCloudT); // Original point cloud
PointCloudT::Ptr cloud_tr(new PointCloudT); // Transformed point cloud
PointCloudT::Ptr cloud_icp(new PointCloudT); // ICP output point cloud
// 检查程序的参数,设置初始ICP迭代的次数,然后尝试加载PLY文件
if (argc < 2)
{
printf("Usage :\n");
printf("\t\t%s file.ply number_of_ICP_iterations\n", argv[0]);
PCL_ERROR("Provide one ply file.\n");
return (-1);
}
int iterations = 1; // 默认的ICP迭代次数
if (argc > 2)
{
// 如果用户将迭代次数作为参数传递
iterations = atoi(argv[2]);
if (iterations < 1)
{
PCL_ERROR("Number of initial iterations must be >= 1\n");
return (-1);
}
}
pcl::console::TicToc time;
time.tic();
if (pcl::io::loadPLYFile(argv[1], *cloud_in) < 0)
{
PCL_ERROR("Error loading cloud %s.\n", argv[1]);
return (-1);
}
std::cout << "\nLoaded file " << argv[1] << " (" << cloud_in->size() << " points) in " << time.toc() << " ms\n" << std::endl;
// 我们使用刚性矩阵变换来变换原始点云。
// cloud_in包含原始点云。
// cloud_tr和cloud_icp包含平移/旋转的点云。
// cloud_tr是我们将用于显示的备份(绿点云)。
// 定义旋转矩阵和平移向量
Eigen::Matrix4d transformation_matrix = Eigen::Matrix4d::Identity();
// 一个旋转矩阵 (see https://en.wikipedia.org/wiki/Rotation_matrix)
double theta = M_PI / 8; // 以弧度为单位的旋转角度
transformation_matrix(0, 0) = std::cos(theta);
transformation_matrix(0, 1) = -sin(theta);
transformation_matrix(1, 0) = sin(theta);
transformation_matrix(1, 1) = std::cos(theta);
// Z轴上的平移(0.4米)
transformation_matrix(2, 3) = 0.4;
// 在终端中显示变换矩阵
std::cout << "Applying this rigid transformation to: cloud_in -> cloud_icp" << std::endl;
print4x4Matrix(transformation_matrix);
// 执行转换
pcl::transformPointCloud(*cloud_in, *cloud_icp, transformation_matrix);
*cloud_tr = *cloud_icp; // 我们将cloud_icp备份到cloud_tr中以备将来使用
// 这是ICP对象的创建。我们设置ICP算法的参数。
// setMaximumIterations(iterations)设置要执行的初始迭代次数(默认值为1)。
// 然后,我们将点云转换为cloud_icp。 第一次对齐后,我们将在下一次使用该ICP对象时(当用户按下“空格”时)将ICP最大迭代次数设置为1。
// ICP算法
time.tic();
pcl::IterativeClosestPoint<PointT, PointT> icp;
icp.setMaximumIterations(iterations);
icp.setInputSource(cloud_icp);
icp.setInputTarget(cloud_in);
icp.align(*cloud_icp);
icp.setMaximumIterations(1); // 下次调用.align()函数时,我们将此变量设置为1
std::cout << "Applied " << iterations << " ICP iteration(s) in " << time.toc() << " ms" << std::endl;
// 检查ICP算法是否收敛;否则退出程序。如果返回true,我们将转换矩阵存储在4x4矩阵中,然后打印刚性矩阵转换。
if (icp.hasConverged())
{
std::cout << "\nICP has converged, score is " << icp.getFitnessScore() << std::endl;
std::cout << "\nICP transformation " << iterations << " : cloud_icp -> cloud_in" << std::endl;
transformation_matrix = icp.getFinalTransformation().cast<double>();
print4x4Matrix(transformation_matrix);
}
else
{
PCL_ERROR("\nICP has not converged.\n");
return (-1);
}
// 可视化
pcl::visualization::PCLVisualizer viewer("ICP demo");
// 创建两个垂直分隔的窗口
int v1(0);
int v2(1);
viewer.createViewPort(0.0, 0.0, 0.5, 1.0, v1);
viewer.createViewPort(0.5, 0.0, 1.0, 1.0, v2);
// 颜色
float bckgr_gray_level = 0.0; // 黑色
float txt_gray_lvl = 1.0 - bckgr_gray_level;
// 原始点云为白色
pcl::visualization::PointCloudColorHandlerCustom<PointT> cloud_in_color_h(cloud_in, (int)255 * txt_gray_lvl, (int)255 * txt_gray_lvl,
(int)255 * txt_gray_lvl);
viewer.addPointCloud(cloud_in, cloud_in_color_h, "cloud_in_v1", v1);
viewer.addPointCloud(cloud_in, cloud_in_color_h, "cloud_in_v2", v2);
// 变换后的点云为绿色
pcl::visualization::PointCloudColorHandlerCustom<PointT> cloud_tr_color_h(cloud_tr, 20, 180, 20);
viewer.addPointCloud(cloud_tr, cloud_tr_color_h, "cloud_tr_v1", v1);
// ICP对齐点云为红色
pcl::visualization::PointCloudColorHandlerCustom<PointT> cloud_icp_color_h(cloud_icp, 180, 20, 20);
viewer.addPointCloud(cloud_icp, cloud_icp_color_h, "cloud_icp_v2", v2);
// 在每个视口中添加文本描述
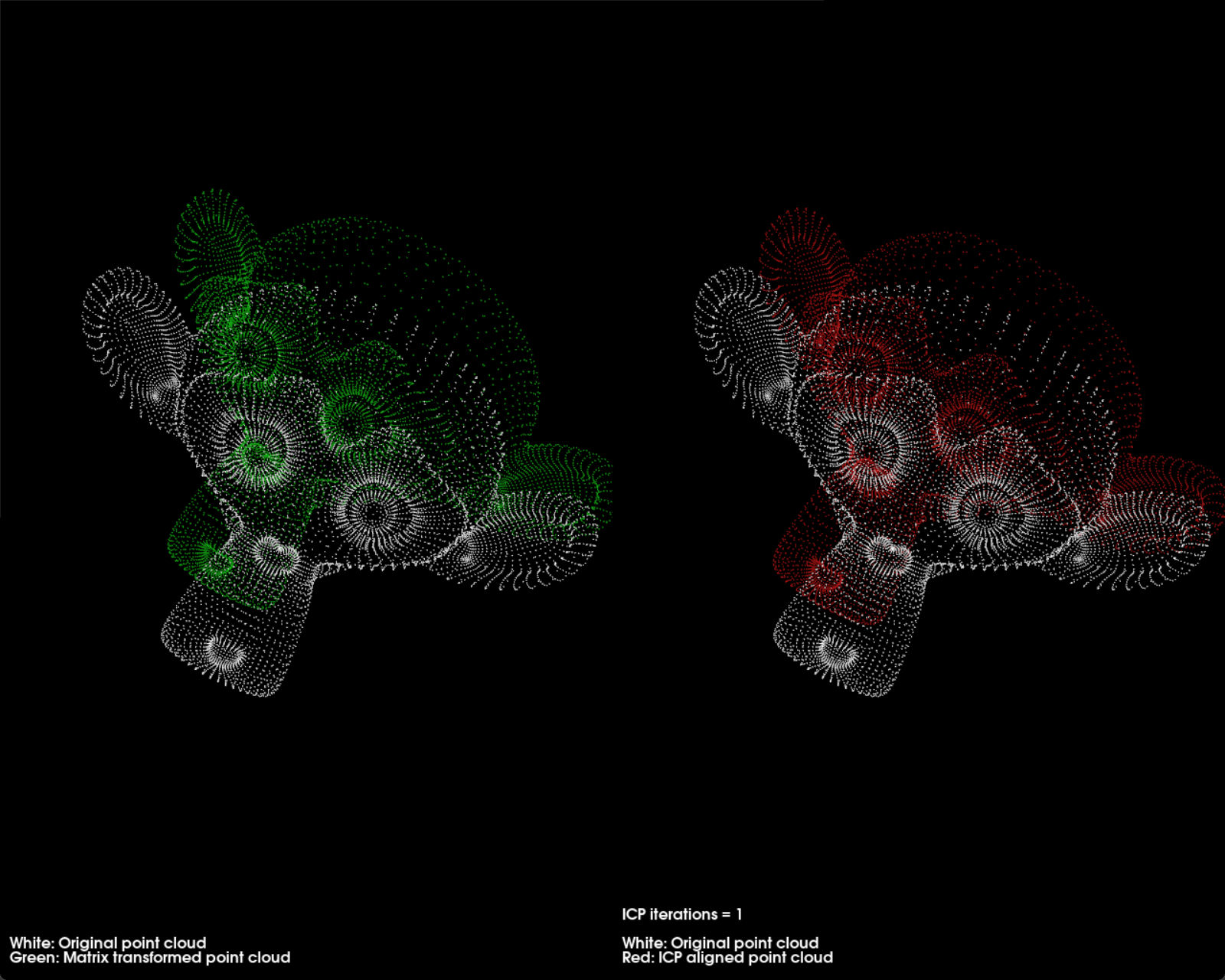
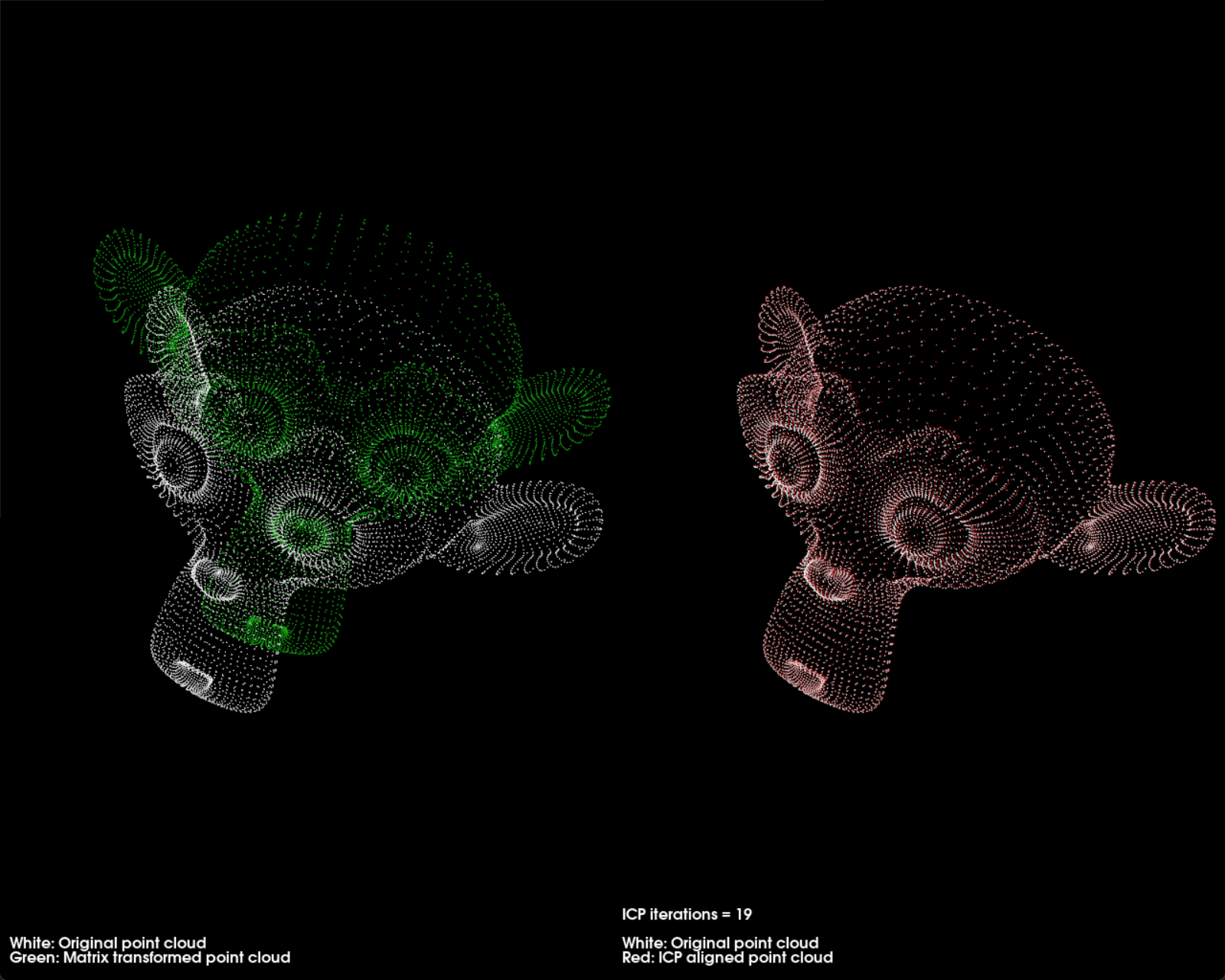
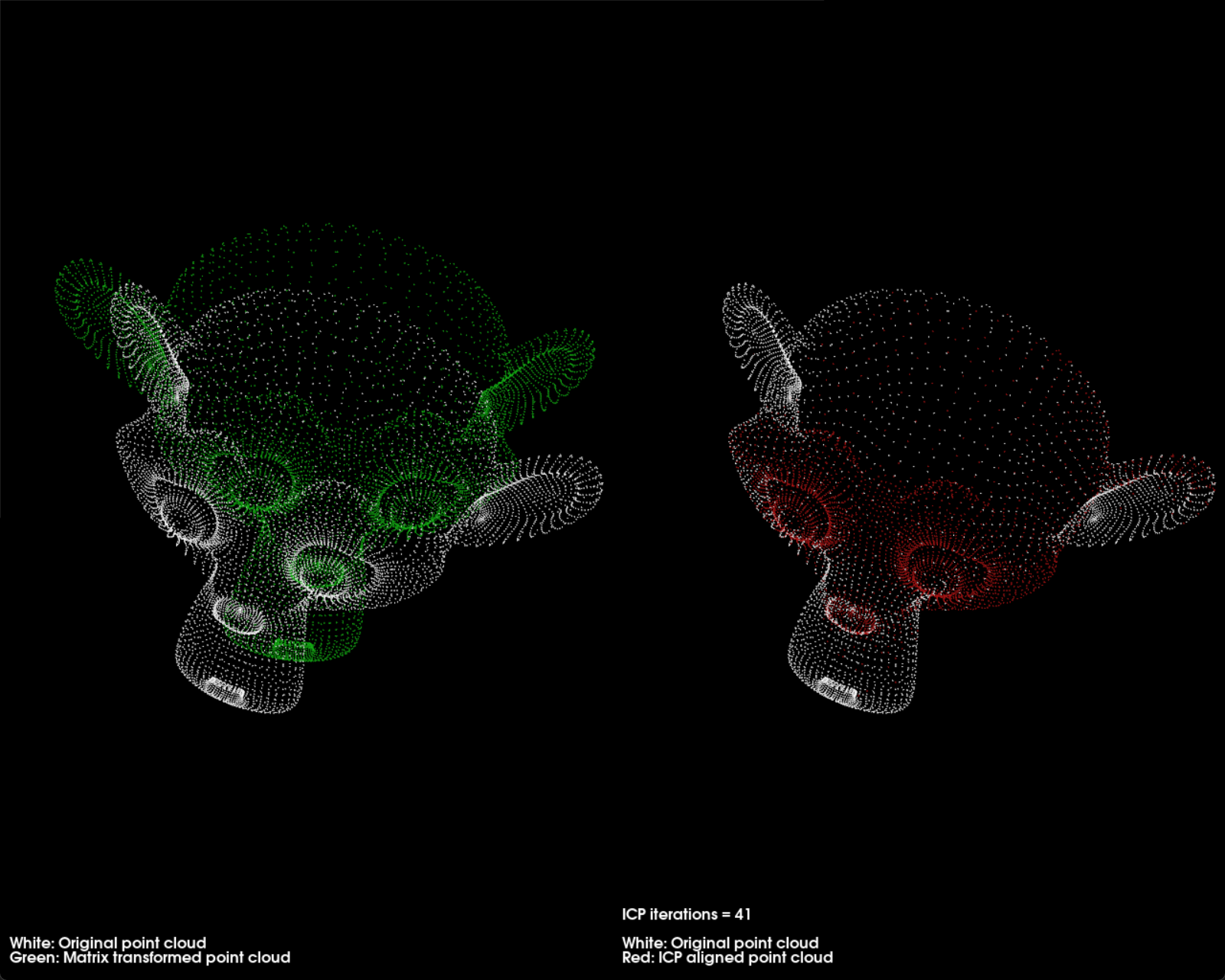
viewer.addText("White: Original point cloud\nGreen: Matrix transformed point cloud", 10, 15, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "icp_info_1", v1);
viewer.addText("White: Original point cloud\nRed: ICP aligned point cloud", 10, 15, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "icp_info_2", v2);
std::stringstream ss;
ss << iterations;
std::string iterations_cnt = "ICP iterations = " + ss.str();
viewer.addText(iterations_cnt, 10, 60, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "iterations_cnt", v2);
// 设置背景颜色
viewer.setBackgroundColor(bckgr_gray_level, bckgr_gray_level, bckgr_gray_level, v1);
viewer.setBackgroundColor(bckgr_gray_level, bckgr_gray_level, bckgr_gray_level, v2);
// 设置相机位置和方向
viewer.setCameraPosition(-3.68332, 2.94092, 5.71266, 0.289847, 0.921947, -0.256907, 0);
viewer.setSize(1280, 1024); // 可视化窗口的尺寸
// 注册键盘回调:
viewer.registerKeyboardCallback(&keyboardEventOccurred, (void*)NULL);
//可视化
while (!viewer.wasStopped())
{
viewer.spinOnce();
// 如果用户按下空格:
if (next_iteration)
{
// ICP算法
time.tic();
// 如果用户按下键盘上的任意键,则会调用keyboardEventOccurred函数。 此功能检查键是否为“空格”。
// 如果是,则全局布尔值next_iteration设置为true,从而允许查看器循环输入代码的下一部分:调用ICP对象以进行对齐。
// 记住,我们已经配置了该对象输入/输出云,并且之前通过setMaximumIterations将最大迭代次数设置为1。
icp.align(*cloud_icp);
std::cout << "Applied 1 ICP iteration in " << time.toc() << " ms" << std::endl;
// 和以前一样,我们检查ICP是否收敛,如果不收敛,则退出程序。
if (icp.hasConverged())
{
// printf(“ 033 [11A”); 在终端增加11行以覆盖显示的最后一个矩阵是一个小技巧。
// 简而言之,它允许替换文本而不是编写新行; 使输出更具可读性。 我们增加迭代次数以更新可视化器中的文本值。
printf("\033[11A"); // Go up 11 lines in terminal output.
printf("\nICP has converged, score is %+.0e\n", icp.getFitnessScore());
// 这意味着,如果您已经完成了10次迭代,则此函数返回矩阵以将点云从迭代10转换为11。
std::cout << "\nICP transformation " << ++iterations << " : cloud_icp -> cloud_in" << std::endl;
// 函数getFinalTransformation()返回在迭代过程中完成的刚性矩阵转换(此处为1次迭代)。
transformation_matrix *= icp.getFinalTransformation().cast<double>(); // WARNING /!\ This is not accurate! For "educational" purpose only!
print4x4Matrix(transformation_matrix); // 打印原始姿态和当前姿态之间的转换
ss.str("");
ss << iterations;
std::string iterations_cnt = "ICP iterations = " + ss.str();
viewer.updateText(iterations_cnt, 10, 60, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "iterations_cnt");
viewer.updatePointCloud(cloud_icp, cloud_icp_color_h, "cloud_icp_v2");
}
else
{
PCL_ERROR("\nICP has not converged.\n");
return (-1);
}
//这不是我们想要的。如果我们将最后一个矩阵与新矩阵相乘,那么结果就是从开始到当前迭代的转换矩阵。
}
next_iteration = false;
}
return (0);
}使用方式
windows下执行以下命令:
.\xxx.exe ...\monkey.ply 1随着迭代次数增加,效果如下:
迭代次数=1
迭代次数=19
 迭代次数=41
迭代次数=41
官方文档:https://pcl-tutorials.readthedocs.io/en/latest/interactive_icp.html