1 概念及特性
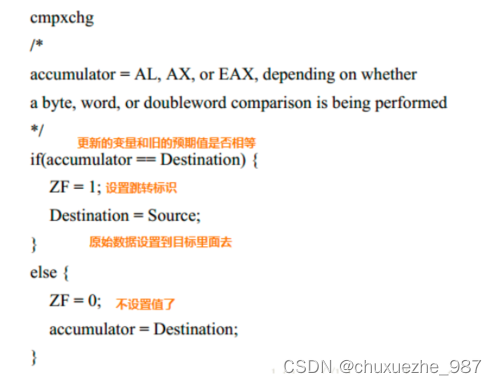
CAS(Compare And Swap/Set)比较并交换,CAS 算法的过程是这样:它包含 3 个参数
CAS(V,E,N)。V 表示要更新的变量(内存值),E 表示预期值(旧的),N 表示新值。当且仅当 V 值等于 E 值时,才会将 V 的值设为 N,如果 V 值和 E 值不同,则说明已经有其他线程做了更新,则当
前线程什么都不做。最后,CAS 返回当前 V 的真实值。
CAS 操作是抱着乐观的态度进行的(乐观锁),它总是认为自己可以成功完成操作。当多个线程同时使用 CAS 操作一个变量时,只有一个会胜出,并成功更新,其余均会失败。失败的线程不会被挂起,仅是被告知失败,并且允许再次尝试,当然也允许失败的线程放弃操作。基于这样的原理,CAS 操作即使没有锁,也可以发现其他线程对当前线程的干扰,并进行恰当的处理。
2 原子包 java.util.concurrent.atomic(锁自旋)
JDK1.5 的原子包:java.util.concurrent.atomic 这个包里面提供了一组原子类。其基本的特性就
是在多线程环境下,当有多个线程同时执行这些类的实例包含的方法时,具有排他性,即当某个
线程进入方法,执行其中的指令时,不会被其他线程打断,而别的线程就像自旋锁一样,一直等
到该方法执行完成,才由 JVM 从等待队列中选择一个另一个线程进入,这只是一种逻辑上的理解。相对于对于 synchronized 这种阻塞算法,CAS 是非阻塞算法的一种常见实现。由于一般 CPU 切换时间比 CPU 指令集操作更加长, 所以 J.U.C 在性能上有了很大的提升。如下代码:
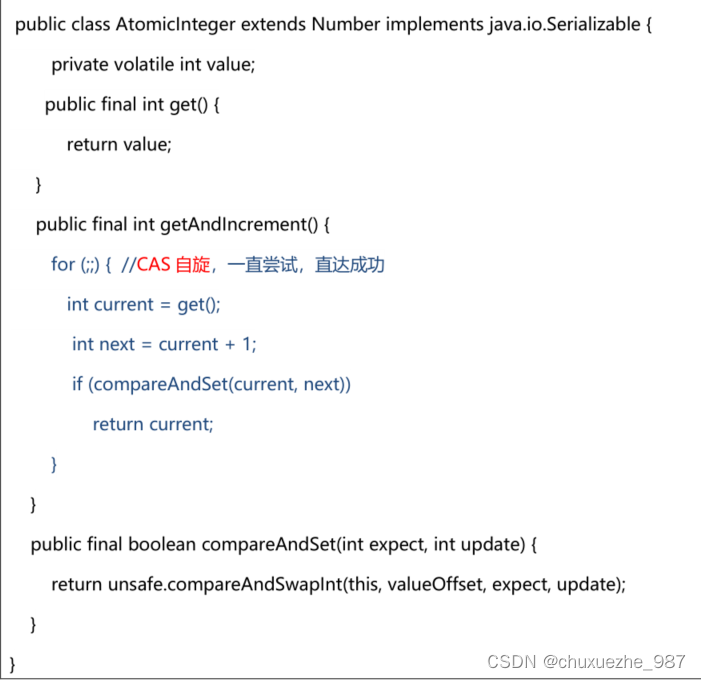
getAndIncrement 采用了 CAS 操作,每次从内存中读取数据然后将此数据和+1 后的结果进行
CAS 操作,如果成功就返回结果,否则重试直到成功为止。而 compareAndSet 利用 JNI 来完成
CPU 指令的操作。
3 ABA 问题
CAS 会导致“ABA 问题”。CAS 算法实现一个重要前提需要取出内存中某时刻的数据,而在下时刻比较并替换,那么在这个时间差类会导致数据的变化。
比如说一个线程 one 从内存位置 V 中取出 A,这时候另一个线程 two 也从内存中取出 A,并且
two 进行了一些操作变成了 B,然后 two 又将 V 位置的数据变成 A,这时候线程 one 进行 CAS 操
作发现内存中仍然是 A,然后 one 操作成功。尽管线程 one 的 CAS 操作成功,但是不代表这个过
程就是没有问题的。
部分乐观锁的实现是通过版本号(version)的方式来解决 ABA 问题,乐观锁每次在执行数据的修
改操作时,都会带上一个版本号,一旦版本号和数据的版本号一致就可以执行修改操作并对版本
号执行+1 操作,否则就执行失败。因为每次操作的版本号都会随之增加,所以不会出现 ABA 问
题,因为版本号只会增加不会减少。
4 什么是 什么是 AQS( ( 抽象的队列同步器 )
AbstractQueuedSynchronizer 类如其名,抽象的队列式的同步器,AQS 定义了一套多线程访问
共享资源的同步器框架,许多同步类实现都依赖于它,如常用的
ReentrantLock/Semaphore/CountDownLatch。
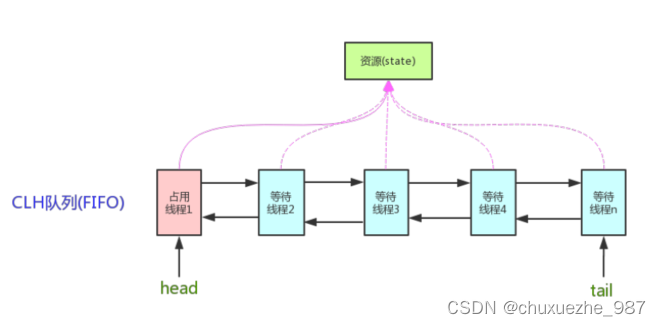
它维护了一个 volatile int state(代表共享资源)和一个 FIFO 线程等待队列(多线程争用资源被阻塞时会进入此队列)。这里 volatile 是核心关键词,具体 volatile 的语义,在此不述。state 的访问方式有三种:
- getState()
- setState()
- compareAndSetState()
AQS 定义两种资源共享方式
- Exclusive 独占资源 -ReentrantLock
Exclusive(独占,只有一个线程能执行,如 ReentrantLock)
- Share 共享资源 -Semaphore/CountDownLatch
Share(共享,多个线程可同时执行,如 Semaphore/CountDownLatch)。
AQS只是一个框架,具体资源的获取/释放方式交由自定义同步器去实现,AQS这里只定义了一个接口,具体资源的获取交由自定义同步器去实现了(通过state的get/set/CAS)之所以没有定义成abstract,是因为独占模式下只用实现 tryAcquire-tryRelease,而共享模式下只用实现
tryAcquireShared-tryReleaseShared。如果都定义成abstract,那么每个模式也要去实现另一模
式下的接口。不同的自定义同步器争用共享资源的方式也不同。自定义同步器在实现时只需要实
现共享资源 state 的获取与释放方式即可,至于具体线程等待队列的维护(如获取资源失败入队/
唤醒出队等),AQS 已经在顶层实现好了。
自定义同步器实现时主要实现以下几种方法:
1. isHeldExclusively():该线程是否正在独占资源。只有用到 condition 才需要去实现它。
2. tryAcquire(int):独占方式。尝试获取资源,成功则返回 true,失败则返回 false。
3. tryRelease(int):独占方式。尝试释放资源,成功则返回 true,失败则返回 false。
4. tryAcquireShared(int):共享方式。尝试获取资源。负数表示失败;0 表示成功,但没有剩余
可用资源;正数表示成功,且有剩余资源。
5. tryReleaseShared(int):共享方式。尝试释放资源,如果释放后允许唤醒后续等待结点返回
true,否则返回 false。
同步器 的实现是 ABS 核心( state 资源状态计数)
同步器的实现是 ABS 核心,以 ReentrantLock 为例,state 初始化为 0,表示未锁定状态。A 线程lock()时,会调用 tryAcquire()独占该锁并将 state+1。此后,其他线程再 tryAcquire()时就会失
败,直到A线程unlock()到state=0(即释放锁)为止,其它线程才有机会获取该锁。当然,释放
锁之前,A 线程自己是可以重复获取此锁的(state 会累加),这就是可重入的概念。但要注意,
获取多少次就要释放多么次,这样才能保证 state 是能回到零态的。
以 CountDownLatch 以例,任务分为 N 个子线程去执行,state 也初始化为 N(注意 N 要与
线程个数一致)。这 N 个子线程是并行执行的,每个子线程执行完后 countDown()一次,state
会 CAS 减 1。等到所有子线程都执行完后(即 state=0),会 unpark()主调用线程,然后主调用线程
就会从 await()函数返回,继续后余动作。
ReentrantReadWriteLock 实现独占和共享两种 方式
一般来说,自定义同步器要么是独占方法,要么是共享方式,他们也只需实现 tryAcquire-
tryRelease、tryAcquireShared-tryReleaseShared 中的一种即可。但 AQS 也支持自定义同步器
同时实现独占和共享两种方式,如 ReentrantReadWriteLock。