文章目录
- 1.霍夫变换(Hough Transform)原理介绍
- 2.霍夫变换(Hough Transform)算法流程
- 3.霍夫变换(Hough Transform)算法代码
- 4.霍夫变换(Hough Transform)算法效果
1.霍夫变换(Hough Transform)原理介绍
Hough Transform是一种常用的计算机视觉图形检验方法,霍夫变换一般用于检验直线或者圆。
霍夫变换的原理具体如下所示:
假设图像中存在一条直线,表达式如下所示:
y
=
k
x
+
b
y=kx+b
y=kx+b
假设我们任意指定一个点
(
x
0
,
y
0
)
(x_{0},y_{0})
(x0,y0),则对于任意穿过该点的直线,一定有如下公式成立:
b
=
−
k
x
0
+
y
0
b=-kx_{0}+y_{0}
b=−kx0+y0
此时我将以x,y为轴的图像变为以b,k为轴的图像,此时该直线也能够进行变化,并且如上推导可知,对应的图像也是一条直线,如图所示:
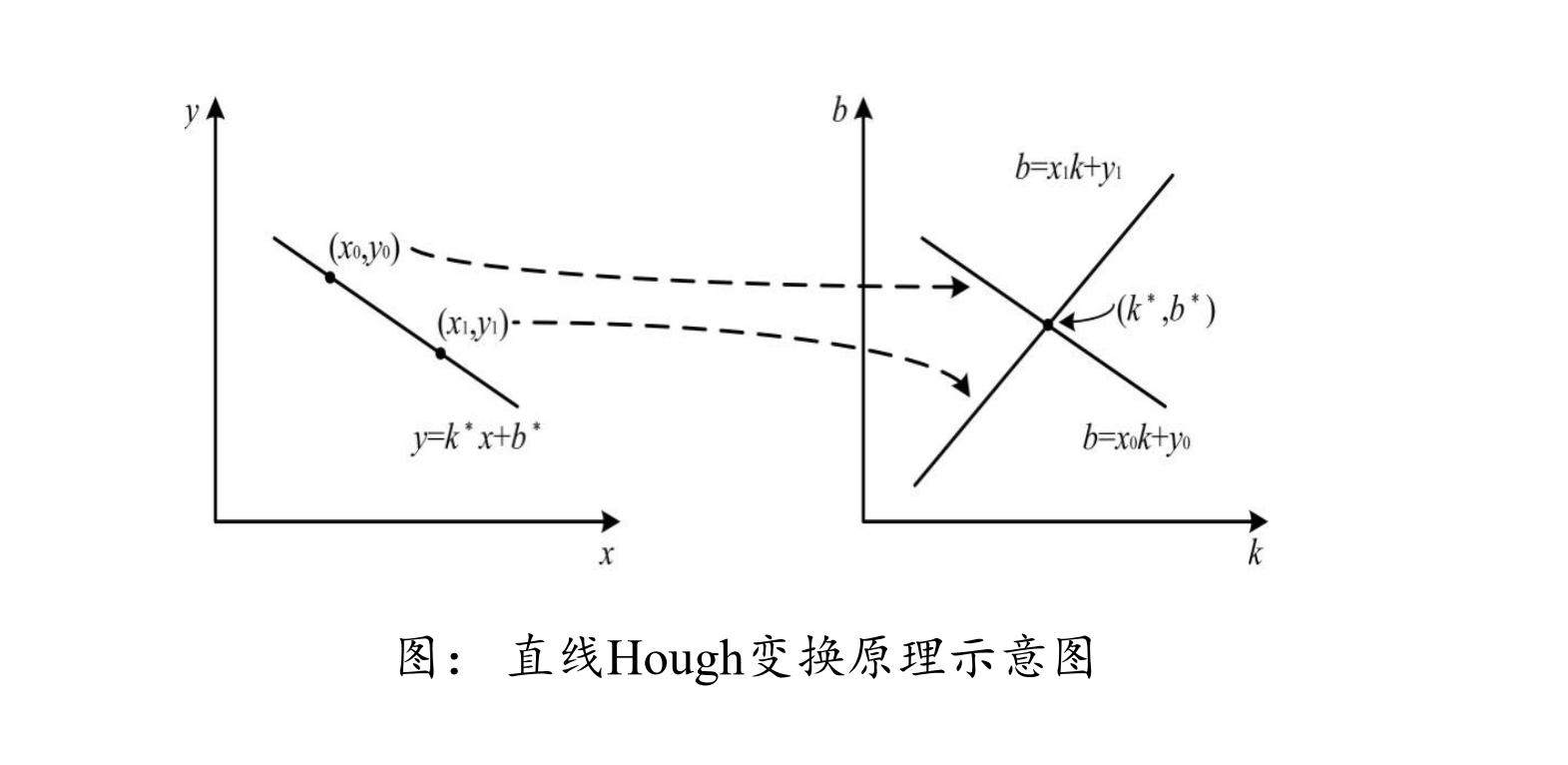
进一步的,我们再从直线上取一点
(
x
1
,
y
1
)
(x_{1},y_{1})
(x1,y1),则必有如下公式:
b
=
−
k
x
1
+
y
1
b=-kx_{1}+y_{1}
b=−kx1+y1
在图像上绘制会这样的函数,我们可知,两条直线相交于一点
(
k
∗
,
b
∗
)
(k^{*},b^{*})
(k∗,b∗),而这个点就是x,y轴上的
(
x
1
,
y
1
)
(x_{1},y_{1})
(x1,y1)和
(
x
0
,
y
0
)
(x_{0},y_{0})
(x0,y0)两点所确定的直线。

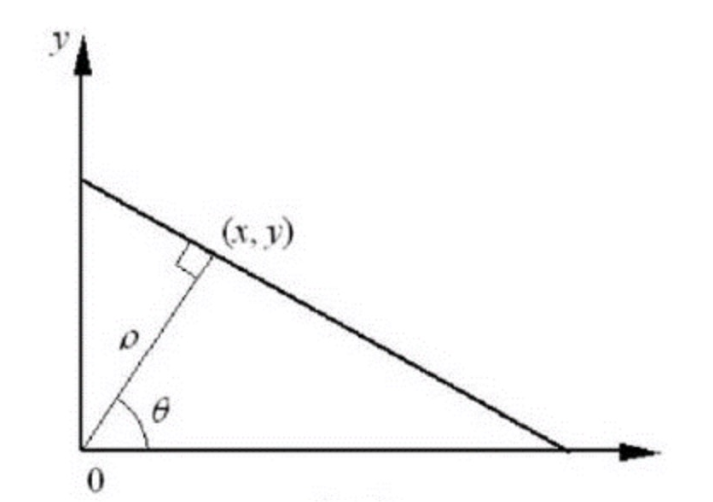
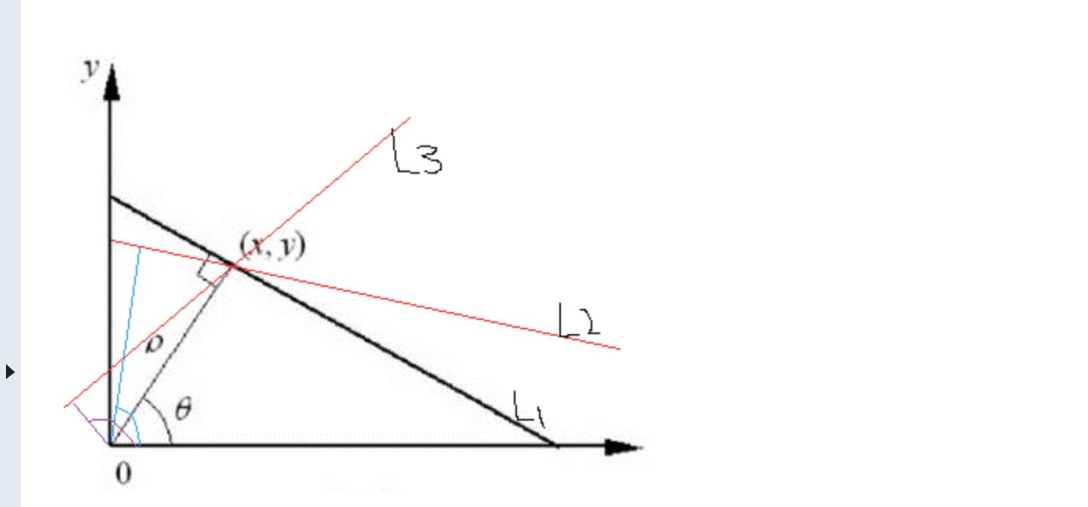
但是我们在实际的直线检测中,我们不会用到上述的坐标系方法,上述的方法只是提供一个求解的思路,我们将使用极坐标方程来完成上述方法的求解,对于上述的直线,极坐标方程可以表示为:
ρ
=
x
c
o
s
θ
+
s
i
n
θ
\rho=xcos\theta+sin\theta
ρ=xcosθ+sinθ
其中,
θ
\theta
θ为直线的法线向量与x轴正向的夹角,而
ρ
\rho
ρ为坐标系原点至直线的垂直距离,如下图所示:
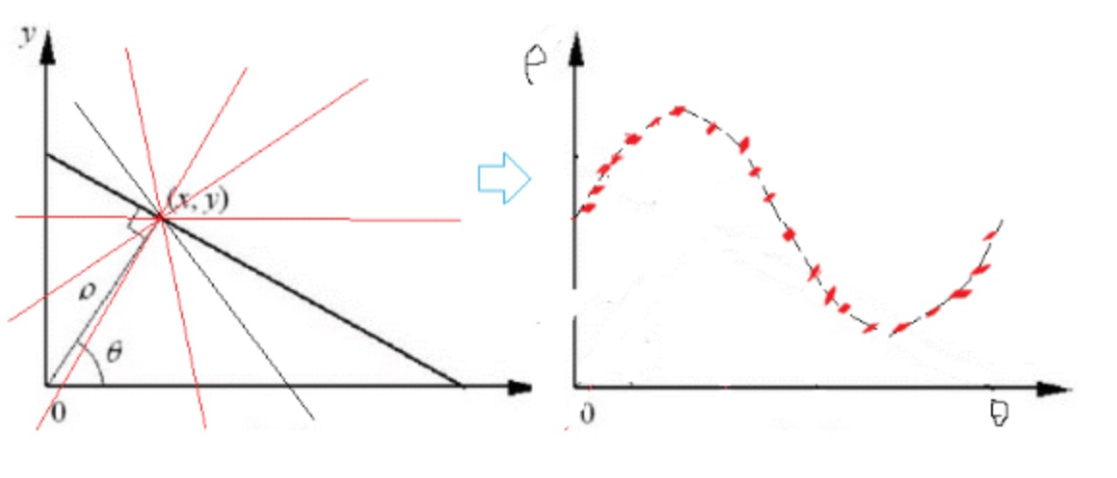
如下所示,我们可以发现,这条直线在极坐标下只有一个(
ρ
\rho
ρ,
θ
\theta
θ) 与之对应,改变一个参数大小变换到空域上的直线即会改变。而空域这条直线上的所有点都可以在极坐标为(
ρ
\rho
ρ,
θ
\theta
θ) 所表示的直线上 (如下图所示)
空域直线上的一个点在极坐标系下具体对应多少个极坐标对,取决于
θ
\theta
θ的步长 ,如果设步长为
β
\beta
β,则极坐标对n的表示如下所示:
n
=
360
β
n=\frac{360}{\beta}
n=β360
对应的图片如下所示:
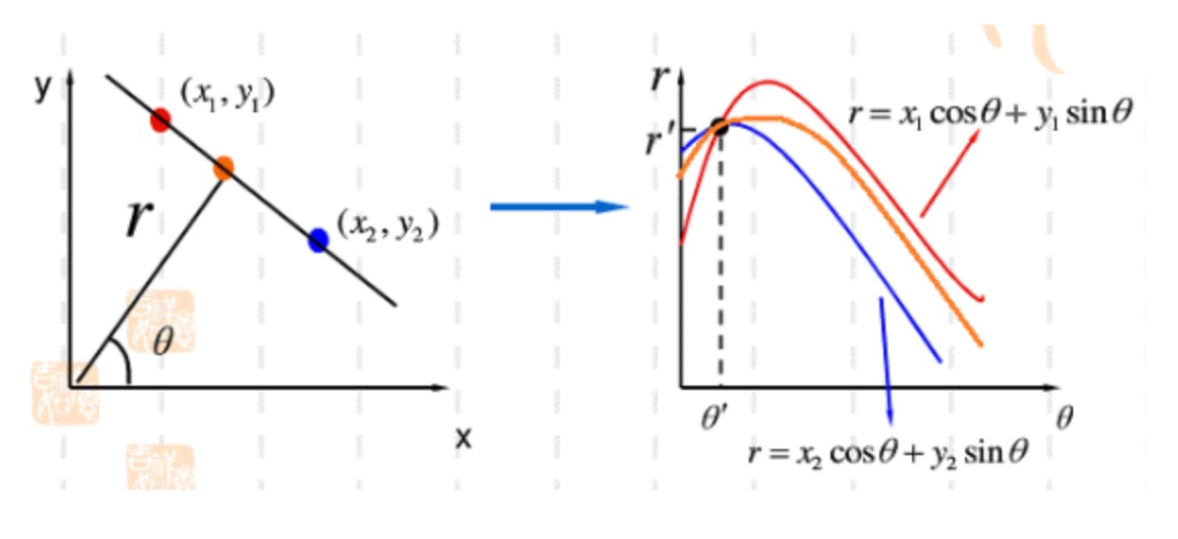
接下来我们假设空域上的三个点对应的极坐标曲线如下图的(a)所示,极坐标曲线同时经过一个点表示空域下有一条直线经过这三个点,只要寻找交点最多的点,在空域内就是要寻找的直线。
2.霍夫变换(Hough Transform)算法流程
·Hough变换直线检测的步骤如下:
1.设0的取值范围为[0,360],单位为度根据检测精度要求,采取适当的步长对角度和长度的取值范围进行离散化,形成0-p平面上的离散网格。
2.将每一个离散网格视为一个投票累加器,初始时全部清0。
3.遍历图像的所有像素,对于每个像素计算离散值0i和p=xcos0+ysin0.
4.对在参数空间中将对应的累加器中的值加1,从而完成求出相应的离散化值p,对于每个(p,0)该像素点的投票的投票之后,在离散化的参数空间中找出所累积的投票值
5.访问完所有的图像像素并完成所有,点这些点所对应的参数即为检测得到的直线的参数大于某给定闽值T的局部极大值点,
3.霍夫变换(Hough Transform)算法代码
import numpy as np
import cv2
from PIL import Image,ImageEnhance
import matplotlib.pyplot as plt
"""
hough变换是一种常用的计算机视觉图形检验方法,霍夫变换一般用于检验直线或者圆。
"""
img = Image.open(r"C:\Users\Zeng Zhong Yan\Desktop\py.vs\python学习\test.webp")
#增强图像效果
img = ImageEnhance.Contrast(img).enhance(3)
img.show()
#处理成矩阵,便于后续处理
img = np.array(img)
#灰度处理
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#cv2.THRESH_OTSU具有双峰值,显示效果更好.
"""
cv2.THRESH_OTSU使用最小二乘法处理像素点。一般情况下,cv2.THRESH_OTSU适合双峰图。
cv2.THRESH_TRIANGLE使用三角算法处理像素点。一般情况下,cv2.THRESH_TRIANGLE适合单峰图。
"""
ret, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_OTSU)
#canny边缘检验算法处理
result = cv2.Canny(thresh, ret-30, ret+30, apertureSize=3)
#霍夫变换检测直线
lines = cv2.HoughLinesP(result, 1, 1 * np.pi / 180, 10, minLineLength=10, maxLineGap=5)
# 画出检测的线段
for line in lines:
for x1, y1, x2, y2 in line:
cv2.line(img, (x1, y1), (x2, y2), (255, 0, 0),2)
img = Image.fromarray(img, 'RGB')
img.show()
4.霍夫变换(Hough Transform)算法效果
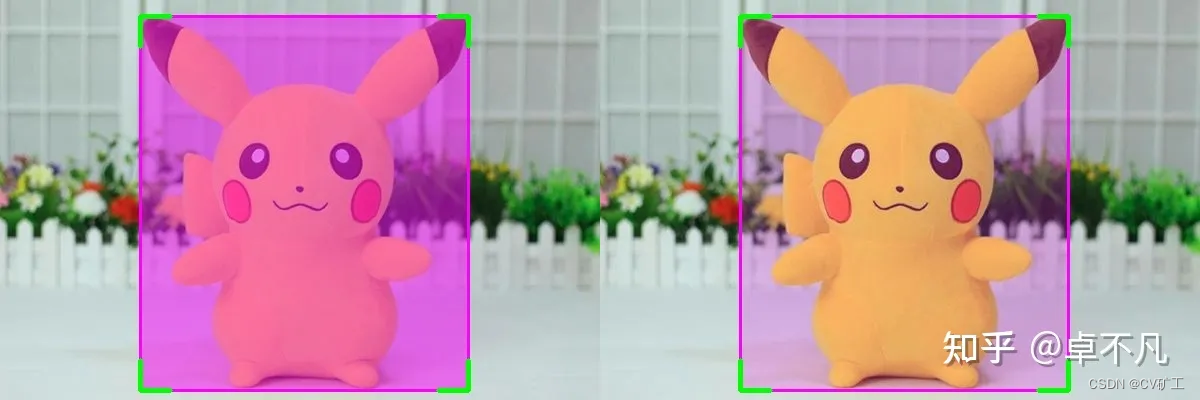
1.原先的图片如下所示:

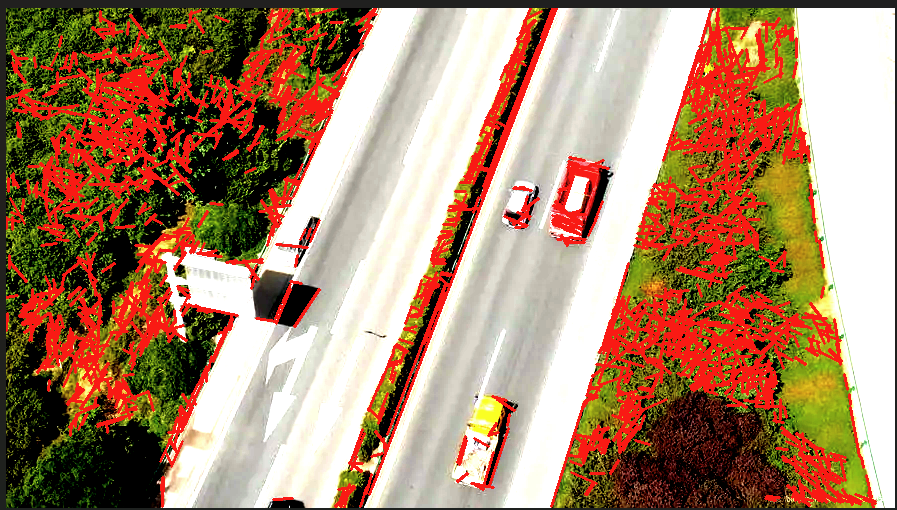
2.霍夫变换后的检测直线的效果