该文章记录学习stm32串口遇到的一些问题,完整代码地址。
一、项目描述
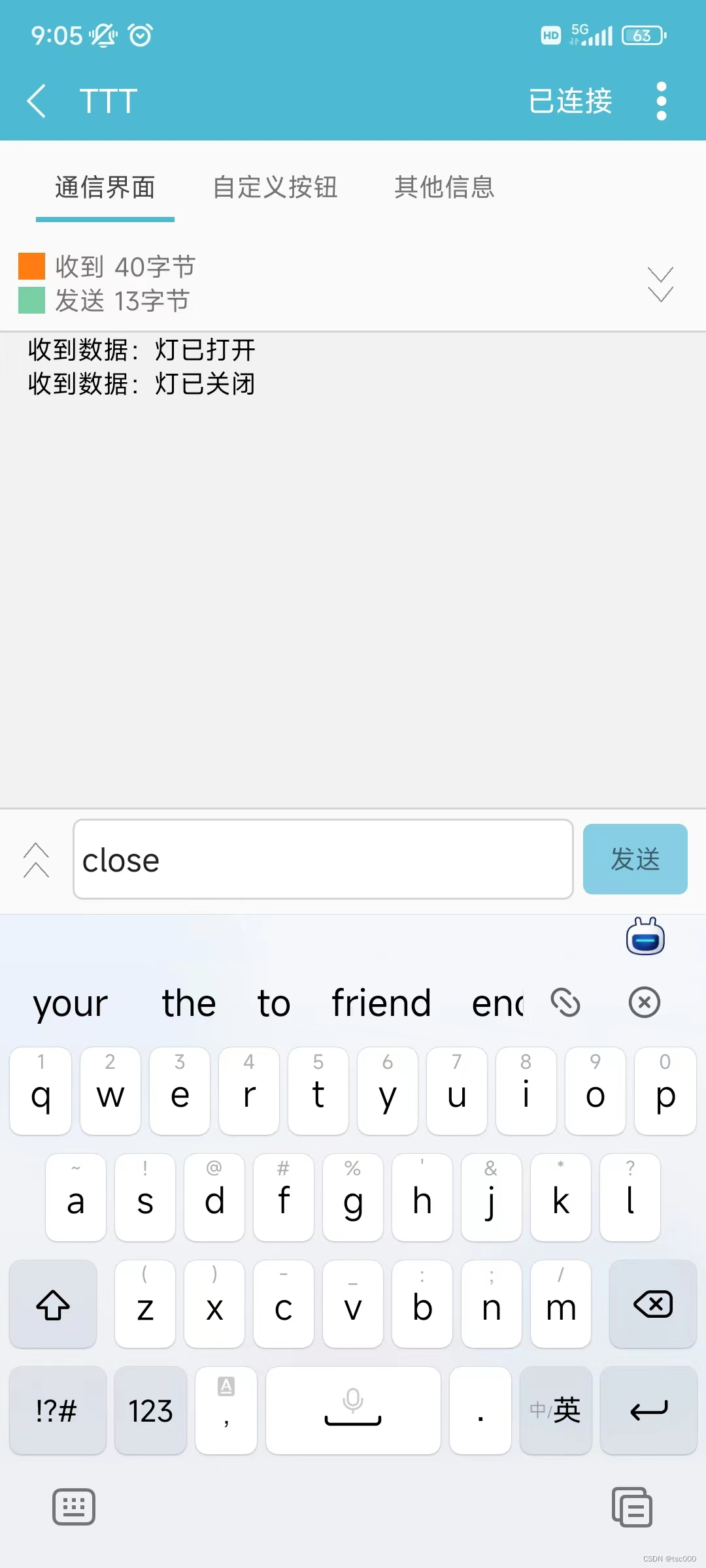
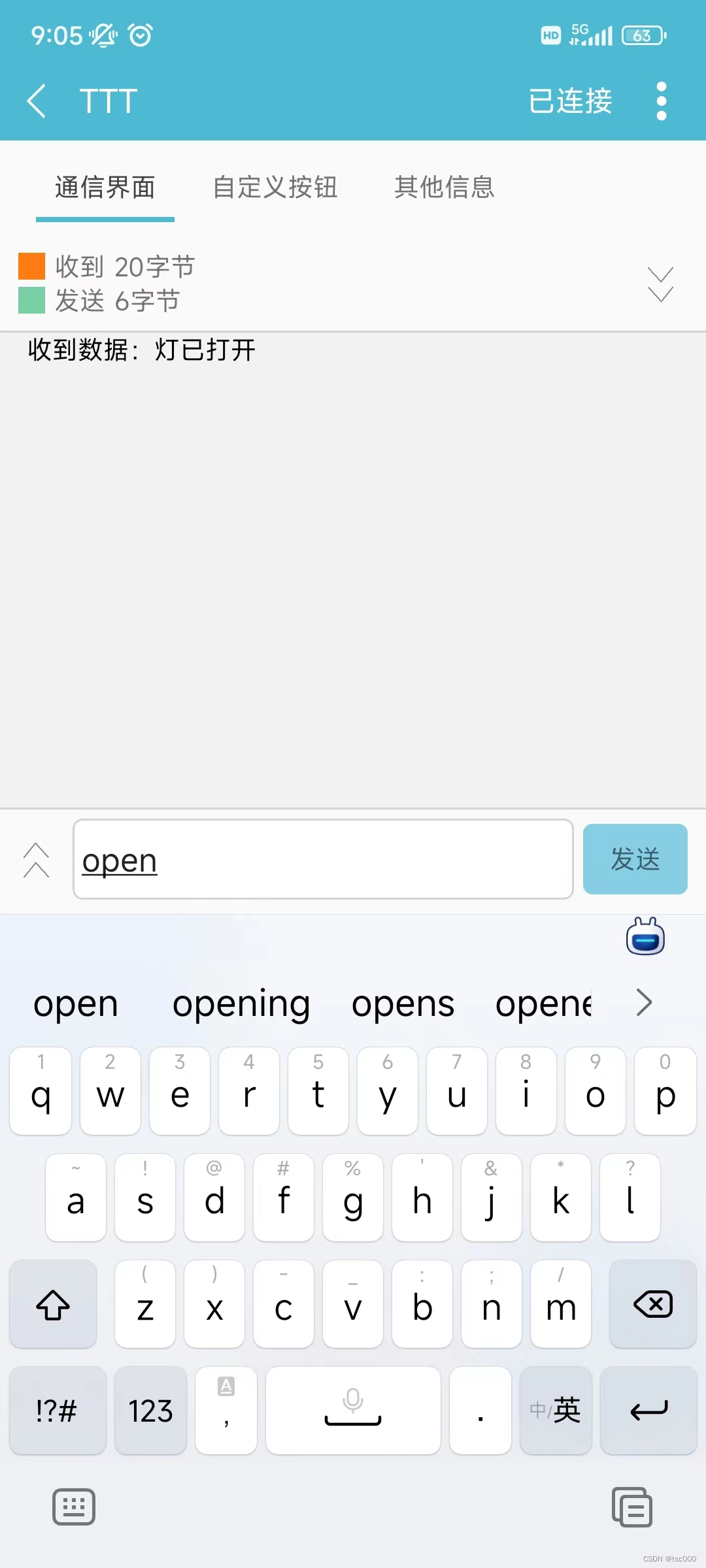
通过串口或蓝牙发送指令来控制led灯。
- open ------> led 亮
- close ------> led 灭
- 其它 -------> 反馈给串口或蓝牙错误指令
二、项目用到的模块
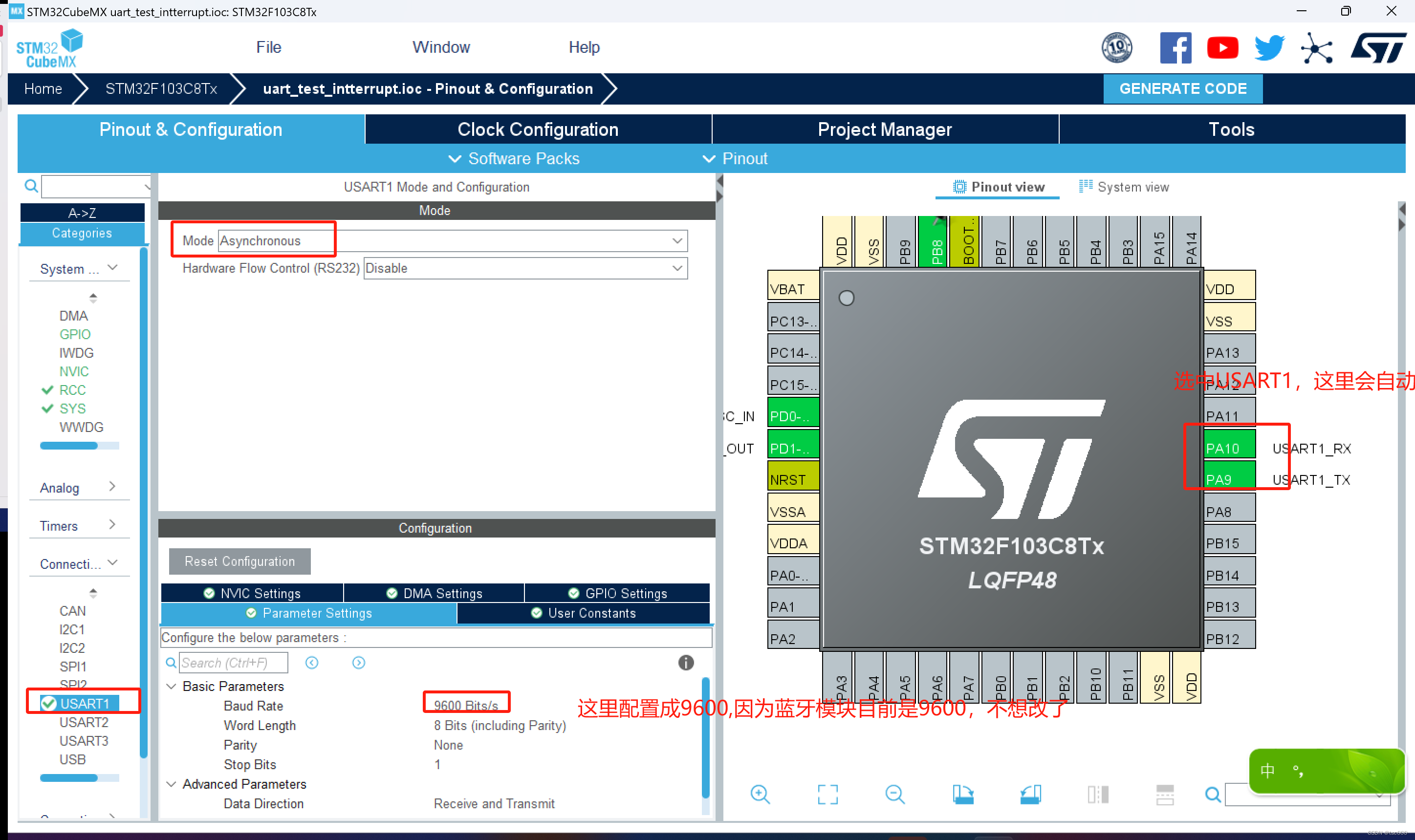
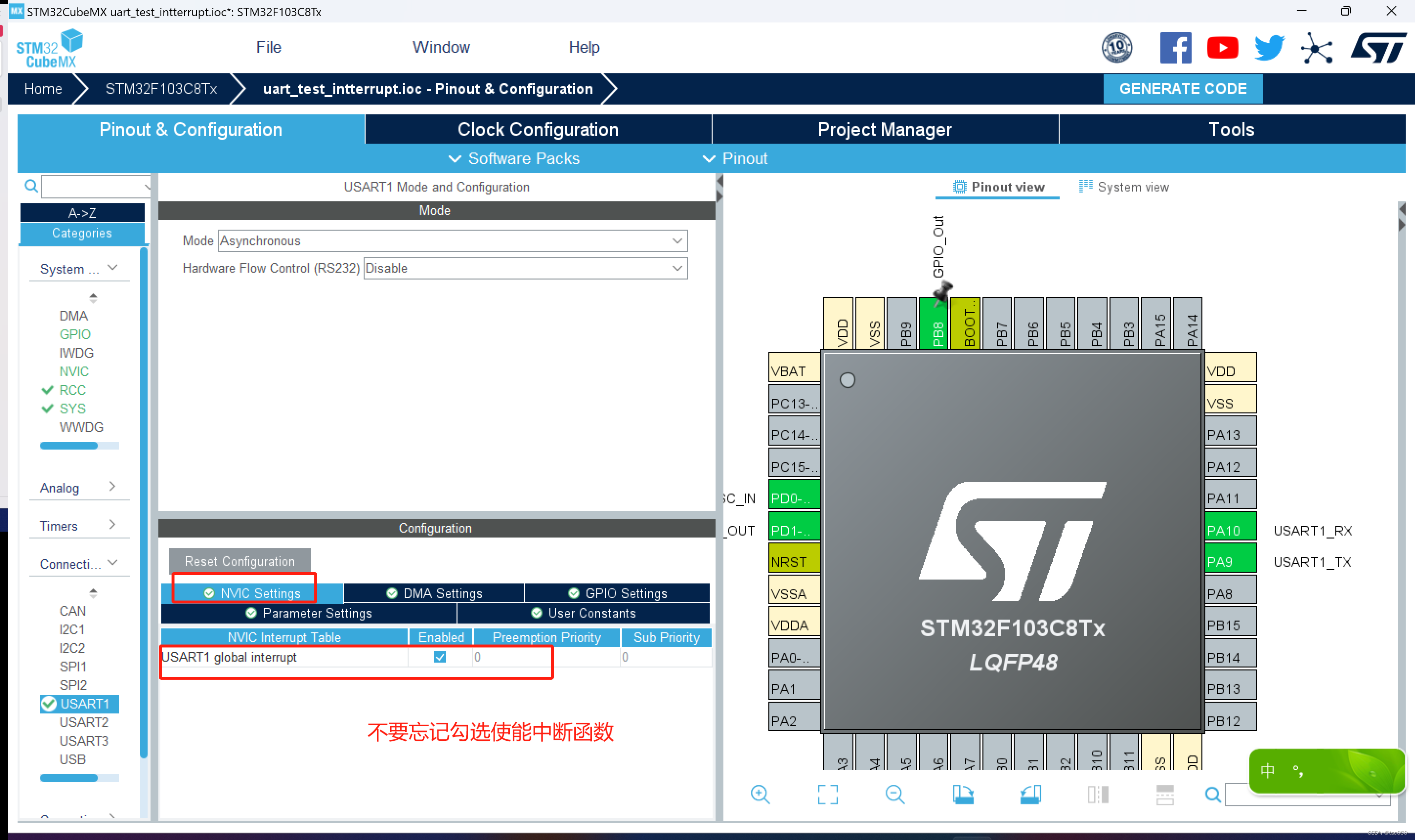
- stm32 串口1,PA9(TX), PA10(RX)
- HC01 蓝牙模块,PA9(TX), PA10(RX)
- led灯, PB8
三、USART1关键配置说明
四、代码说明
main.c中主要代码如下:
#define UART1_REC_LEN 200
uint16_t UART1_RX_STA=0;
uint8_t buf=0;
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
void SystemClock_Config(void);
// 接收中断
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {
if(huart->Instance != USART1) {
return;
}
// 数据接收完成
if((UART1_RX_STA & 0x8000) != 0) {
HAL_UART_Receive_IT(&huart1, &buf, 1);
return;
}
// 接收到回车之后判断后续的是不是换行,如果是换行,数据接收完成,但是还要开启一下中断
if(UART1_RX_STA&0x4000) {
UART1_RX_STA= (buf == 0x0a) ? (UART1_RX_STA| 0x8000) : 0;
} else {
// 接收到回车,将高第二位置1,否则继续接收数据
if(buf == 0x0d) {
UART1_RX_STA |= 0x4000;
} else {
UART1_RX_Buffer[UART1_RX_STA&0x3fff] = buf;
UART1_RX_STA ++;
if(UART1_RX_STA > UART1_REC_LEN - 1) {
UART1_RX_STA = 0;
}
}
}
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
int fputc(int ch, FILE *file) {
unsigned char temp[1] = {ch};
HAL_UART_Transmit(&huart1, temp, 1, 0xfff);
return ch;
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
HAL_UART_Receive_IT(&huart1, &buf, 1);
while (1)
{
if(UART1_RX_STA & 0x8000)
{
printf("收到数据:");
if(UART1_RX_Buffer[0] == '\0') continue;
if(!strcmp((const char *)UART1_RX_Buffer, "open")) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
} else if(!strcmp((const char *)UART1_RX_Buffer, "close")){
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
} else {
printf("error code");
}
HAL_UART_Transmit(&huart1, UART1_RX_Buffer, UART1_RX_STA & 0x3fff, 0xffff);
while(huart1.gState != HAL_UART_STATE_READY);
UART1_RX_STA = 0;
} else {
printf("hello heart\r\n");
}
HAL_Delay(1000);
}
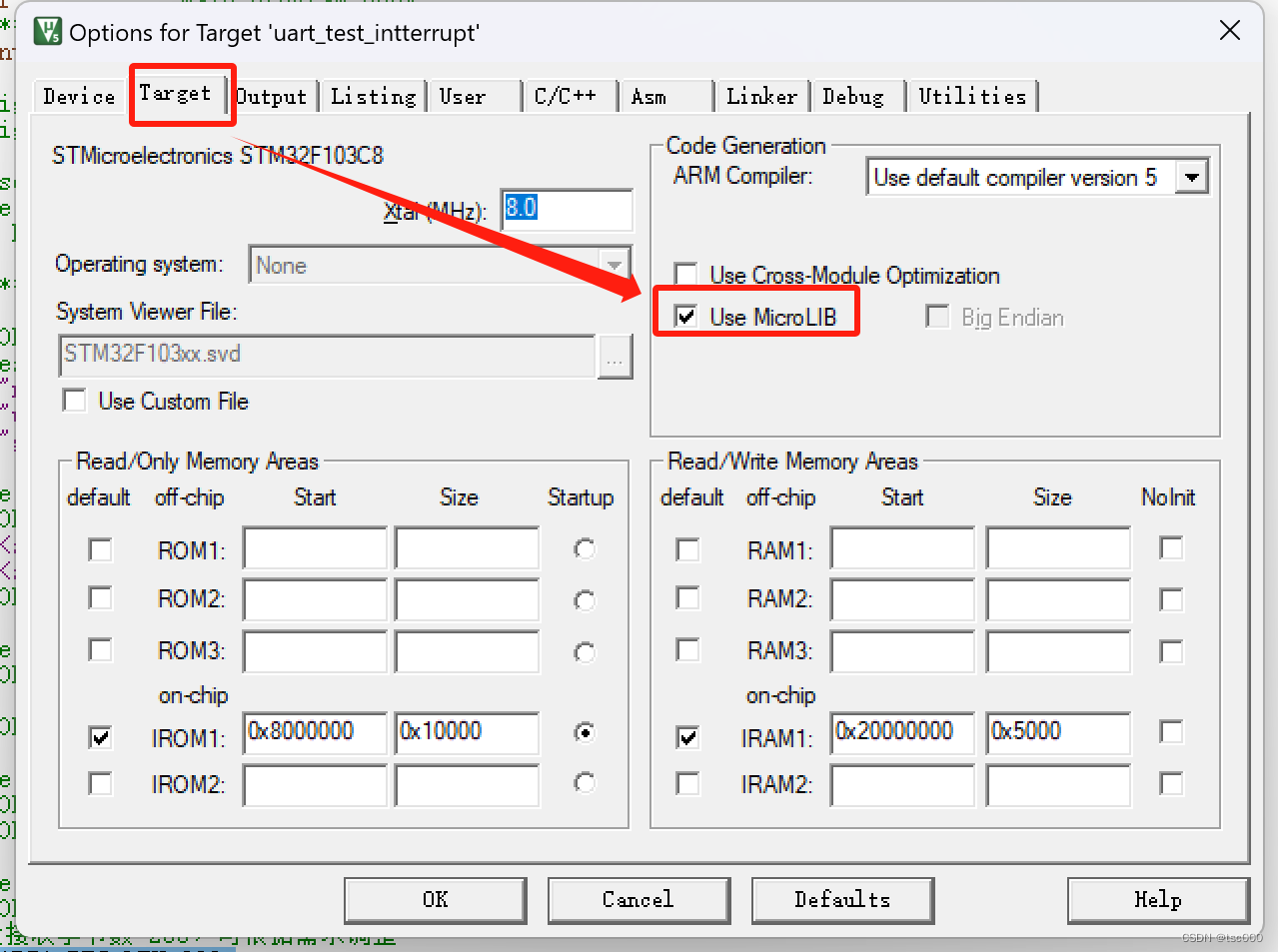
}4.1、重定向printf打印功能到串口
重写fputc函数就可以重定向printf,里面就是调用了HAL库中串口的发送函数。
int fputc(int ch, FILE *file) {
unsigned char temp[1] = {ch};
HAL_UART_Transmit(&huart1, temp, 1, 0xfff);
return ch;
}注意:这里需要在keil 选中Use Micro LIB,否则会不成功。
4.2、开启接收中断
初始化完成之后和接收中断函数调用完成之后,需要重新调用接收中断函数
HAL_UART_Receive_IT(&huart1, &buf, 1);4.3、接收中断函数
这里定义一个uint16_t类型的UART1_RX_STA变量,其中
- 最高位表示是否数据完成
- 次高位表示是否接收了回车
- 其它位表示接收的字节数
注意点:
- 中断函数最好不要有延时函数,可能会造成数据接收异常
- 中断函数最好不要打印函数,也可能导致时间过长,造成数据异常
- 双串口调试(正好板子上引出了两组USART1引脚)
- 串口和蓝牙同时连接时,最好只用一个发,要不然可能有影响
4.4、串口初始化函数
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}
Instance类型USART_TypeDef,主要是串口包含的寄存器,USART1是一个宏,绑定串口1的物理地址,方式和之前介绍的GPIO类似。
另外USART1 是挂载到APB2总线上,其它串口挂载到APB1总线上。
typedef struct
{
__IO uint32_t SR; /*!< USART Status register, Address offset: 0x00 */
__IO uint32_t DR; /*!< USART Data register, Address offset: 0x04 */
__IO uint32_t BRR; /*!< USART Baud rate register, Address offset: 0x08 */
__IO uint32_t CR1; /*!< USART Control register 1, Address offset: 0x0C */
__IO uint32_t CR2; /*!< USART Control register 2, Address offset: 0x10 */
__IO uint32_t CR3; /*!< USART Control register 3, Address offset: 0x14 */
__IO uint32_t GTPR; /*!< USART Guard time and prescaler register, Address offset: 0x18 */
} USART_TypeDef;huart1 的类型是UART_HandleTypeDef,定义如下
typedef struct __UART_HandleTypeDef
{
USART_TypeDef *Instance;
UART_InitTypeDef Init;
const uint8_t *pTxBuffPtr;
uint16_t TxXferSize;
__IO uint16_t TxXferCount;
uint8_t *pRxBuffPtr;
uint16_t RxXferSize;
__IO uint16_t RxXferCount;
__IO HAL_UART_RxTypeTypeDef ReceptionType;
__IO HAL_UART_RxEventTypeTypeDef RxEventType;
DMA_HandleTypeDef *hdmatx;
DMA_HandleTypeDef *hdmarx;
HAL_LockTypeDef Lock;
__IO HAL_UART_StateTypeDef gState;
__IO HAL_UART_StateTypeDef RxState;
__IO uint32_t ErrorCode;
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
void (* TxHalfCpltCallback)(struct __UART_HandleTypeDef *huart);
*******省略代码*******
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
} UART_HandleTypeDef;Init类型如下,主要是设置数据传输的配置。
typedef struct
{
uint32_t BaudRate;
uint32_t WordLength;
uint32_t StopBits;
uint32_t Parity;
uint32_t Mode;
uint32_t HwFlowCtl;
uint32_t OverSampling;
} UART_InitTypeDef;
Init 主要配置波特率,字长,停止位等等。
其实HAL库中的模块配置都很相似,包括GPIO, 定时器等。
4.4.1、HAL_UART_Init
主要操作如下,代码已经添加了注释
HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart)
{
//判断 是否地址无效
if (huart == NULL)
{
return HAL_ERROR;
}
// 流控制位有效或无效时的操作
if (huart->Init.HwFlowCtl != UART_HWCONTROL_NONE)
{
// 流控制器只适用于串口1 2 3
assert_param(IS_UART_HWFLOW_INSTANCE(huart->Instance));
assert_param(IS_UART_HARDWARE_FLOW_CONTROL(huart->Init.HwFlowCtl));
}
else
{
assert_param(IS_UART_INSTANCE(huart->Instance));
}
assert_param(IS_UART_WORD_LENGTH(huart->Init.WordLength));
#if defined(USART_CR1_OVER8)
assert_param(IS_UART_OVERSAMPLING(huart->Init.OverSampling));
#endif /* USART_CR1_OVER8 */
if (huart->gState == HAL_UART_STATE_RESET)
{
// 先解锁再操作
huart->Lock = HAL_UNLOCKED;
// 这里没有定义回调,只会走else
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
UART_InitCallbacksToDefault(huart);
if (huart->MspInitCallback == NULL)
{
huart->MspInitCallback = HAL_UART_MspInit;
}
huart->MspInitCallback(huart);
#else
//初始化GPIO,串口优先级等
HAL_UART_MspInit(huart);
#endif /* (USE_HAL_UART_REGISTER_CALLBACKS) */
}
huart->gState = HAL_UART_STATE_BUSY;
// 先关闭串口,再操作,最后打开串口
__HAL_UART_DISABLE(huart);
UART_SetConfig(huart);
/* In asynchronous mode, the following bits must be kept cleared:
- LINEN and CLKEN bits in the USART_CR2 register,
- SCEN, HDSEL and IREN bits in the USART_CR3 register.*/
//异步模式下,USART_CR2的LINEN(局域网模式)和CLKEN(时钟使能)要清0
// USART_CR3的SCEN, HDSE, IREN ,STOP(文档里有说明)要清0
CLEAR_BIT(huart->Instance->CR2, (USART_CR2_LINEN | USART_CR2_CLKEN));
CLEAR_BIT(huart->Instance->CR3, (USART_CR3_SCEN | USART_CR3_HDSEL | USART_CR3_IREN));
__HAL_UART_ENABLE(huart);
// 设置串口的初始化状态
huart->ErrorCode = HAL_UART_ERROR_NONE;
huart->gState = HAL_UART_STATE_READY;
huart->RxState = HAL_UART_STATE_READY;
huart->RxEventType = HAL_UART_RXEVENT_TC;
return HAL_OK;
}UART_SetConfig 是串口的主要寄存器配置,核心代码如下
static void UART_SetConfig(UART_HandleTypeDef *huart)
{
uint32_t tmpreg;
uint32_t pclk;
// 设置停止位
MODIFY_REG(huart->Instance->CR2, USART_CR2_STOP, huart->Init.StopBits);
// 根据Init.WordLength 配置USART1_CR1寄存器中各位
#if defined(USART_CR1_OVER8)
tmpreg = (uint32_t)huart->Init.WordLength | huart->Init.Parity | huart->Init.Mode | huart->Init.OverSampling;
MODIFY_REG(huart->Instance->CR1,
(uint32_t)(USART_CR1_M | USART_CR1_PCE | USART_CR1_PS | USART_CR1_TE | USART_CR1_RE | USART_CR1_OVER8),
tmpreg);
#else
tmpreg = (uint32_t)huart->Init.WordLength | huart->Init.Parity | huart->Init.Mode;
MODIFY_REG(huart->Instance->CR1,
(uint32_t)(USART_CR1_M | USART_CR1_PCE | USART_CR1_PS | USART_CR1_TE | USART_CR1_RE),
tmpreg);
#endif /* USART_CR1_OVER8 */
// 配置USART1_CR3寄存器中的RTSE(RTS使能),CTSE(CTS使能)
MODIFY_REG(huart->Instance->CR3, (USART_CR3_RTSE | USART_CR3_CTSE), huart->Init.HwFlowCtl);
// 配置时钟
if(huart->Instance == USART1)
{
pclk = HAL_RCC_GetPCLK2Freq();
}
else
{
pclk = HAL_RCC_GetPCLK1Freq();
}
// 配置波特率
#if defined(USART_CR1_OVER8)
if (huart->Init.OverSampling == UART_OVERSAMPLING_8)
{
huart->Instance->BRR = UART_BRR_SAMPLING8(pclk, huart->Init.BaudRate);
}
else
{
huart->Instance->BRR = UART_BRR_SAMPLING16(pclk, huart->Init.BaudRate);
}
#else
huart->Instance->BRR = UART_BRR_SAMPLING16(pclk, huart->Init.BaudRate);
#endif /* USART_CR1_OVER8 */
}pclk的获取,这里大致分析下它的实现
uint32_t HAL_RCC_GetPCLK2Freq(void)
{
// HAL_RCC_GetHCLKFreq 最终获取的是系统核心时钟16000000hz
// CFGR是时钟配置寄存器,这里要配置的是PPRE2,在11-13位,APB预分频(APB2)
// RCC_CFGR_PPRE2 = 11 1000 0000 0000 正好对应11-13位
// RCC_CFGR_PPRE2_Pos = 8
// const uint8_t APBPrescTable[8U] = {0, 0, 0, 0, 1, 2, 3, 4};
// APBPrescTable[(RCC->CFGR & RCC_CFGR_PPRE2) >> RCC_CFGR_PPRE2_Pos] 这个操作是获取分频系数
// 获取之后将 16000000hz 相除
return (HAL_RCC_GetHCLKFreq() >> APBPrescTable[(RCC->CFGR & RCC_CFGR_PPRE2) >> RCC_CFGR_PPRE2_Pos]);
}五、效果图
![[RF学习记录][ssh library][execute Command】关键字的返回值](https://img-blog.csdnimg.cn/72a23bafb56e49ebb956c7bf20bf051b.png)