I2C系统驱动程序模型
参考资料:
- Linux内核文档:
Documentation\i2c\instantiating-devices.rstDocumentation\i2c\writing-clients.rst
- Linux内核驱动程序示例:
drivers/eeprom/at24.c
1. I2C驱动程序的层次
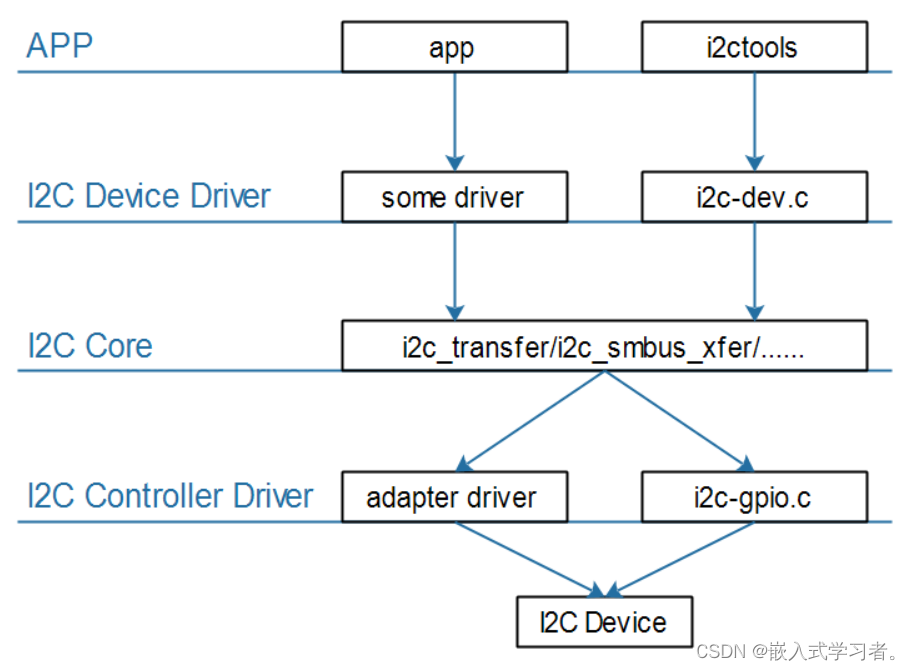
I2C Core就是I2C核心层,它的作用:
- 提供统一的访问函数,比如i2c_transfer、i2c_smbus_xfer等
- 实现
I2C总线-设备-驱动模型,管理:I2C设备(i2c_client)、I2C设备驱动(i2c_driver)、I2C控制器(i2c_adapter)
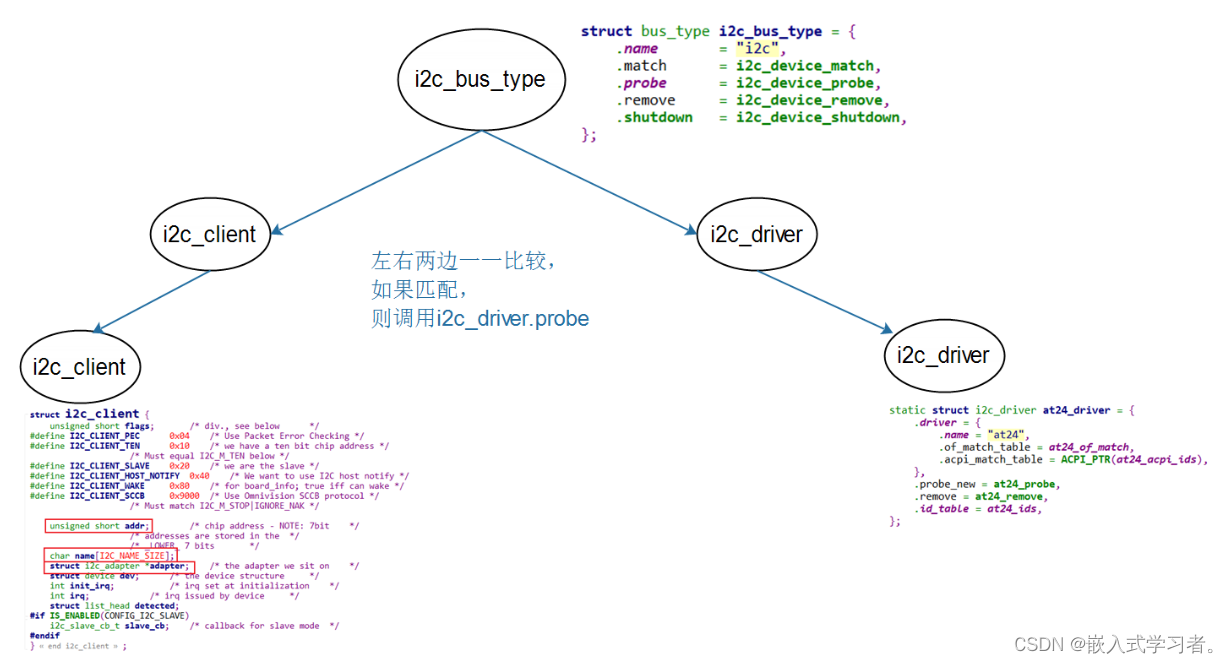
2. I2C总线-设备-驱动模型
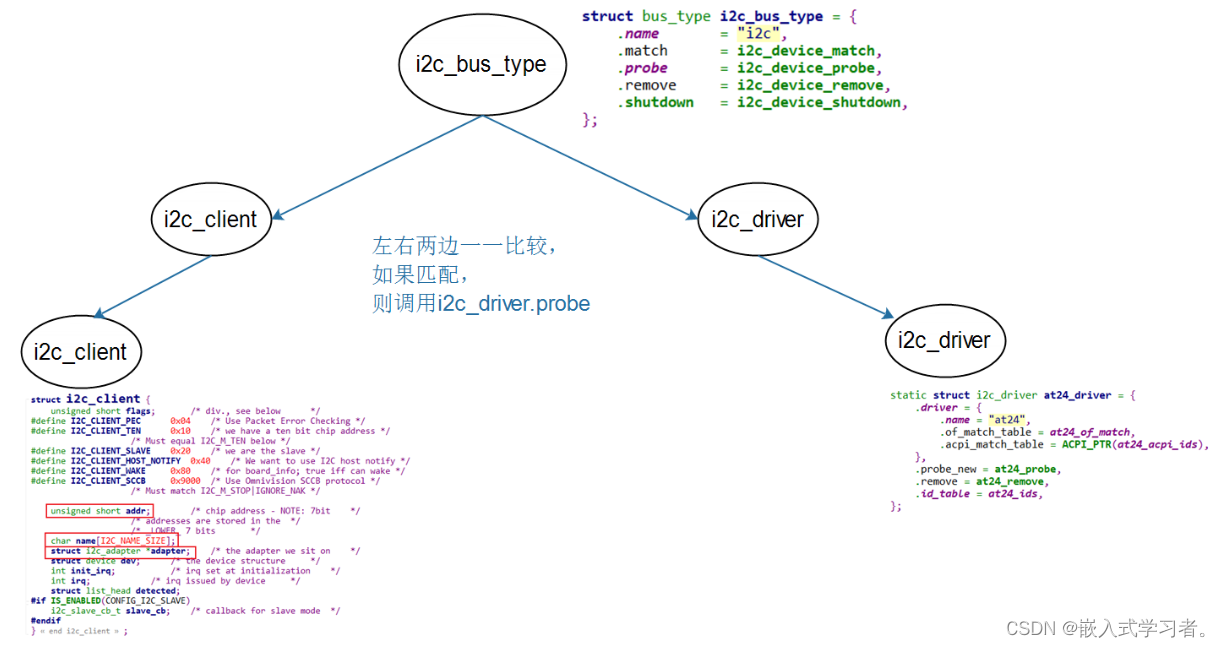
2.1 i2c_driver
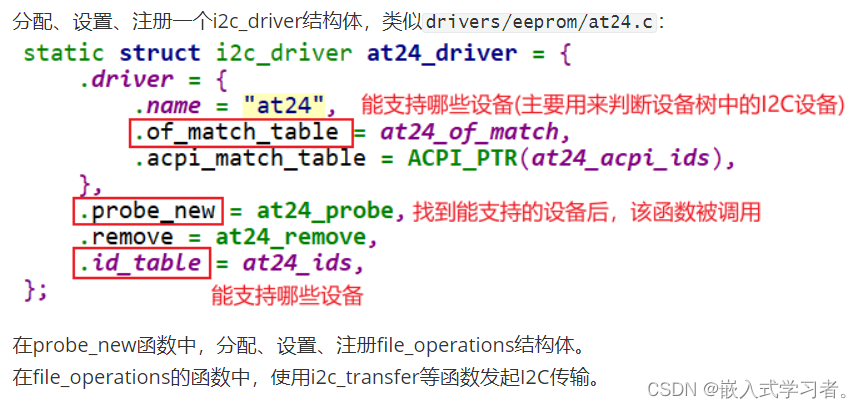
i2c_driver表明能支持哪些设备:
- 使用of_match_table来判断
- 设备树中,某个I2C控制器节点下可以创建I2C设备的节点
- 如果I2C设备节点的compatible属性跟of_match_table的某项兼容,则匹配成功
- i2c_client.name跟某个of_match_table[i].compatible值相同,则匹配成功
- 设备树中,某个I2C控制器节点下可以创建I2C设备的节点
- 使用id_table来判断
- i2c_client.name跟某个id_table[i].name值相同,则匹配成功
i2c_driver跟i2c_client匹配成功后,就调用i2c_driver.probe函数。
2.2 i2c_client
i2c_client表示一个I2C设备,创建i2c_client的方法有4种:
-
方法1
-
通过I2C bus number来创建
int i2c_register_board_info(int busnum, struct i2c_board_info const *info, unsigned len); -
通过设备树来创建
i2c1: i2c@400a0000 { /* ... master properties skipped ... */ clock-frequency = <100000>; flash@50 { compatible = "atmel,24c256"; reg = <0x50>; }; pca9532: gpio@60 { compatible = "nxp,pca9532"; gpio-controller; #gpio-cells = <2>; reg = <0x60>; }; };
-
-
方法2
有时候无法知道该设备挂载哪个I2C bus下,无法知道它对应的I2C bus number。
但是可以通过其他方法知道对应的i2c_adapter结构体。
可以使用下面两个函数来创建i2c_client:-
i2c_new_device
static struct i2c_board_info sfe4001_hwmon_info = { I2C_BOARD_INFO("max6647", 0x4e), }; int sfe4001_init(struct efx_nic *efx) { (...) efx->board_info.hwmon_client = i2c_new_device(&efx->i2c_adap, &sfe4001_hwmon_info); (...) } -
i2c_new_probed_device
static const unsigned short normal_i2c[] = { 0x2c, 0x2d, I2C_CLIENT_END }; static int usb_hcd_nxp_probe(struct platform_device *pdev) { (...) struct i2c_adapter *i2c_adap; struct i2c_board_info i2c_info; (...) i2c_adap = i2c_get_adapter(2); memset(&i2c_info, 0, sizeof(struct i2c_board_info)); strscpy(i2c_info.type, "isp1301_nxp", sizeof(i2c_info.type)); isp1301_i2c_client = i2c_new_probed_device(i2c_adap, &i2c_info, normal_i2c, NULL); i2c_put_adapter(i2c_adap); (...) } -
差别:
- i2c_new_device:会创建i2c_client,即使该设备并不存在
- i2c_new_probed_device:
- 它成功的话,会创建i2c_client,并且表示这个设备肯定存在
- I2C设备的地址可能发生变化,比如AT24C02的引脚A2A1A0电平不一样时,设备地址就不一样
- 可以罗列出可能的地址
- i2c_new_probed_device使用这些地址判断设备是否存在
-
-
方法3(不推荐):由i2c_driver.detect函数来判断是否有对应的I2C设备并生成i2c_client
-
方法4:通过用户空间(user-space)生成
调试时、或者不方便通过代码明确地生成i2c_client时,可以通过用户空间来生成。
// 创建一个i2c_client, .name = "eeprom", .addr=0x50, .adapter是i2c-3
# echo eeprom 0x50 > /sys/bus/i2c/devices/i2c-3/new_device
// 删除一个i2c_client
# echo 0x50 > /sys/bus/i2c/devices/i2c-3/delete_device
编写设备驱动之i2c_driver
参考资料:
Linux内核文档:
Documentation\i2c\instantiating-devices.rst
Documentation\i2c\writing-clients.rst
Linux内核驱动程序示例:
drivers/eeprom/at24.c
1. 套路
1.1 I2C总线-设备-驱动模型
1.2 示例
分配、设置、注册一个i2c_driver结构体,类似drivers/eeprom/at24.c:
2. 编写i2c_driver
2.1 先写一个框架
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/of_device.h>
#include <linux/slab.h>
#include <linux/delay.h>
#include <linux/mutex.h>
#include <linux/mod_devicetable.h>
#include <linux/bitops.h>
#include <linux/jiffies.h>
#include <linux/property.h>
#include <linux/acpi.h>
#include <linux/i2c.h>
#include <linux/nvmem-provider.h>
#include <linux/regmap.h>
#include <linux/pm_runtime.h>
#include <linux/gpio/consumer.h>
static const struct of_device_id of_match_ids_example[] = {
{ .compatible = "com_name,chip_name", .data = NULL },
{ /* END OF LIST */ },
};
static const struct i2c_device_id example_ids[] = {
{ "chip_name", (kernel_ulong_t)NULL },
{ /* END OF LIST */ }
};
static int i2c_driver_example_probe(struct i2c_client *client)
{
return 0;
}
static int i2c_driver_example_remove(struct i2c_client *client)
{
return 0;
}
static struct i2c_driver i2c_example_driver = {
.driver = {
.name = "example",
.of_match_table = of_match_ids_example,
},
.probe_new = i2c_driver_example_probe,
.remove = i2c_driver_example_remove,
.id_table = example_ids,
};
static int __init i2c_driver_example_init(void)
{
return i2c_add_driver(&i2c_example_driver);
}
module_init(i2c_driver_example_init);
static void __exit i2c_driver_example_exit(void)
{
i2c_del_driver(&i2c_example_driver);
}
module_exit(i2c_driver_example_exit);
MODULE_LICENSE("GPL");
2.2 在为AP3216C编写代码
百问网的开发板上有光感芯片AP3216C:
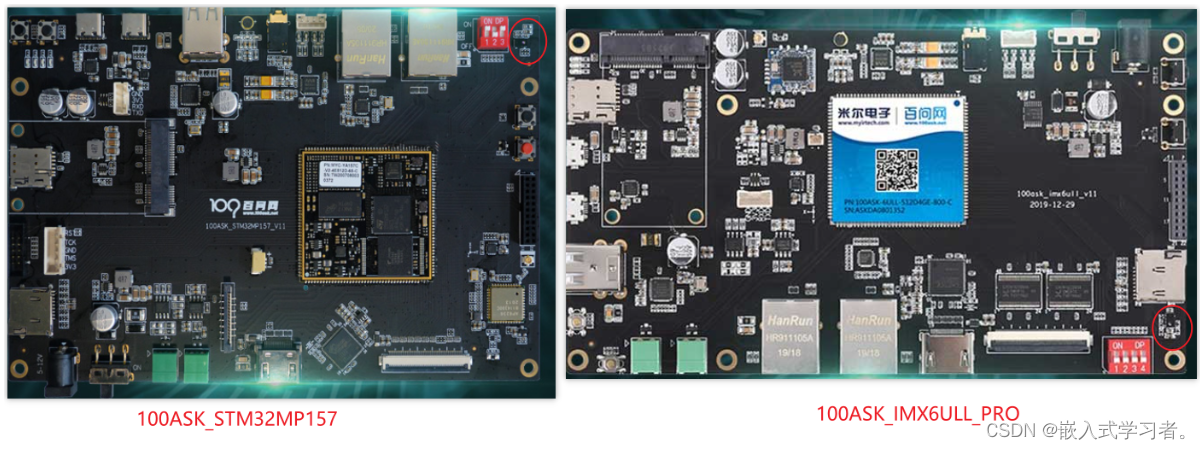
AP3216C是红外、光强、距离三合一的传感器,以读出光强、距离值为例,步骤如下:
复位:往寄存器0写入0x4
使能:往寄存器0写入0x3
读红外:读寄存器0xA、0xB得到2字节的红外数据
读光强:读寄存器0xC、0xD得到2字节的光强
读距离:读寄存器0xE、0xF得到2字节的距离值
AP3216C的设备地址是0x1E。
ap3216c_drv.c
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/of_device.h>
#include <linux/slab.h>
#include <linux/delay.h>
#include <linux/mutex.h>
#include <linux/mod_devicetable.h>
#include <linux/bitops.h>
#include <linux/jiffies.h>
#include <linux/property.h>
#include <linux/acpi.h>
#include <linux/i2c.h>
#include <linux/nvmem-provider.h>
#include <linux/regmap.h>
#include <linux/pm_runtime.h>
#include <linux/gpio/consumer.h>
#include <linux/uaccess.h>
#include <linux/fs.h>
static int major = 0;
static struct class *ap3216c_class;
static struct i2c_client *ap3216c_client;
static ssize_t ap3216c_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
char kernel_buf[6];
int val;
if (size != 6)
return -EINVAL;
val = i2c_smbus_read_word_data(ap3216c_client, 0xA); /* read IR */
kernel_buf[0] = val & 0xff;
kernel_buf[1] = (val>>8) & 0xff;
val = i2c_smbus_read_word_data(ap3216c_client, 0xC); /* read 光强 */
kernel_buf[2] = val & 0xff;
kernel_buf[3] = (val>>8) & 0xff;
val = i2c_smbus_read_word_data(ap3216c_client, 0xE); /* read 距离 */
kernel_buf[4] = val & 0xff;
kernel_buf[5] = (val>>8) & 0xff;
err = copy_to_user(buf, kernel_buf, size);
return size;
}
static int ap3216c_open (struct inode *node, struct file *file)
{
i2c_smbus_write_byte_data(ap3216c_client, 0, 0x4);
/* delay for reset */
mdelay(20);
i2c_smbus_write_byte_data(ap3216c_client, 0, 0x3);
mdelay(250);
return 0;
}
static struct file_operations ap3216c_ops = {
.owner = THIS_MODULE,
.open = ap3216c_open,
.read = ap3216c_read,
};
static const struct of_device_id of_match_ids_ap3216c[] = {
{ .compatible = "lite-on,ap3216c", .data = NULL },
{ /* END OF LIST */ },
};
static const struct i2c_device_id ap3216c_ids[] = {
{ "ap3216c", (kernel_ulong_t)NULL },
{ /* END OF LIST */ }
};
static int ap3216c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
ap3216c_client = client;
/* register_chrdev */
major = register_chrdev(0, "ap3216c", &ap3216c_ops);
ap3216c_class = class_create(THIS_MODULE, "ap3216c_class");
device_create(ap3216c_class, NULL, MKDEV(major, 0), NULL, "ap3216c"); /* /dev/ap3216c */
return 0;
}
static int ap3216c_remove(struct i2c_client *client)
{
printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(ap3216c_class, MKDEV(major, 0));
class_destroy(ap3216c_class);
/* unregister_chrdev */
unregister_chrdev(major, "ap3216c");
return 0;
}
static struct i2c_driver i2c_ap3216c_driver = {
.driver = {
.name = "ap3216c",
.of_match_table = of_match_ids_ap3216c,
},
.probe = ap3216c_probe,
.remove = ap3216c_remove,
.id_table = ap3216c_ids,
};
static int __init i2c_driver_ap3216c_init(void)
{
printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
return i2c_add_driver(&i2c_ap3216c_driver);
}
module_init(i2c_driver_ap3216c_init);
static void __exit i2c_driver_ap3216c_exit(void)
{
i2c_del_driver(&i2c_ap3216c_driver);
}
module_exit(i2c_driver_ap3216c_exit);
MODULE_LICENSE("GPL");
ap3216c_client.c
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/of_device.h>
#include <linux/slab.h>
#include <linux/delay.h>
#include <linux/mutex.h>
#include <linux/mod_devicetable.h>
#include <linux/bitops.h>
#include <linux/jiffies.h>
#include <linux/property.h>
#include <linux/acpi.h>
#include <linux/i2c.h>
#include <linux/nvmem-provider.h>
#include <linux/regmap.h>
#include <linux/pm_runtime.h>
#include <linux/gpio/consumer.h>
#include <linux/uaccess.h>
#include <linux/fs.h>
#if 1
static struct i2c_client *ap3216c_client;
static int __init i2c_client_ap3216c_init(void)
{
struct i2c_adapter *adapter;
static struct i2c_board_info board_info = {
I2C_BOARD_INFO("ap3216c", 0x1e),
};
printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
/* register I2C device */
adapter = i2c_get_adapter(0);
ap3216c_client = i2c_new_device(adapter, &board_info);
i2c_put_adapter(adapter);
return 0;
}
#else
static struct i2c_client *ap3216c_client;
/* Addresses to scan */
static const unsigned short normal_i2c[] = {
0x1e, I2C_CLIENT_END
};
static int __init i2c_client_ap3216c_init(void)
{
struct i2c_adapter *adapter;
struct i2c_board_info board_info;
memset(&board_info, 0, sizeof(struct i2c_board_info));
strscpy(board_info.type, "ap3216c", sizeof(board_info.type));
printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
/* register I2C device */
adapter = i2c_get_adapter(0);
ap3216c_client = i2c_new_probed_device(adapter, &board_info,normal_i2c, NULL);
i2c_put_adapter(adapter);
return 0;
}
#endif
module_init(i2c_client_ap3216c_init);
static void __exit i2c_client_ap3216c_exit(void)
{
i2c_unregister_device(ap3216c_client);
}
module_exit(i2c_client_ap3216c_exit);
MODULE_LICENSE("GPL");
APP
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
/*
*/
int main(int argc, char **argv)
{
int fd;
char buf[6];
int len;
/* 2. 打开文件 */
fd = open("/dev/ap3216c", O_RDWR);
if (fd == -1)
{
printf("can not open file /dev/hello\n");
return -1;
}
len = read(fd, buf, 6);
printf("APP read : ");
for (len = 0; len < 6; len++)
printf("%02x ", buf[len]);
printf("\n");
close(fd);
return 0;
}
Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册
KERN_DIR = /home/book/100ask_imx6ull-sdk/Linux-4.9.88/
all:
make -C $(KERN_DIR) M=`pwd` modules
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order
obj-m += ap3216c_drv.o
obj-m += ap3216c_client.o
I2C_Adapter驱动框架讲解与编写
分配、设置、注册一个i2c_adpater结构体:
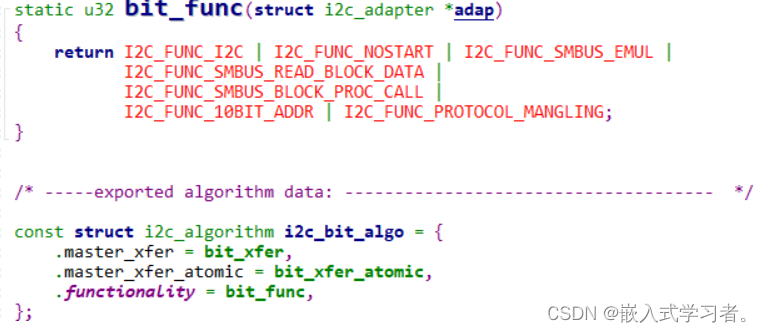
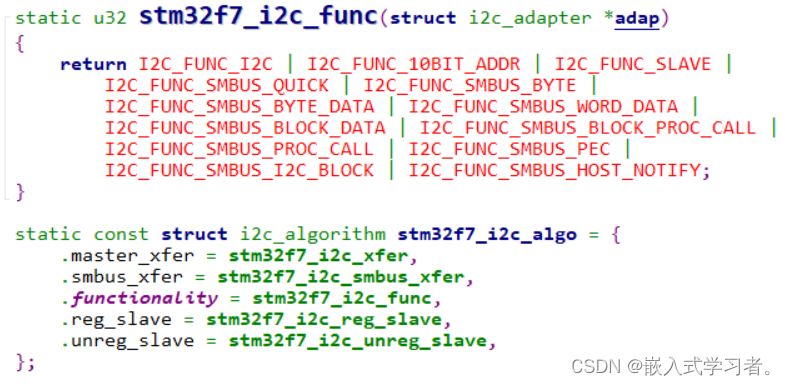
- i2c_adpater的核心是i2c_algorithm
- i2c_algorithm的核心是master_xfer函数
1. 所涉及的函数
-
分配
struct i2c_adpater *adap = kzalloc(sizeof(struct i2c_adpater), GFP_KERNEL); -
设置
adap->owner = THIS_MODULE; adap->algo = &stm32f7_i2c_algo; -
注册:i2c_add_adapter/i2c_add_numbered_adapter
ret = i2c_add_adapter(adap); // 不管adap->nr原来是什么,都动态设置adap->nr ret = i2c_add_numbered_adapter(adap); // 如果adap->nr == -1 则动态分配nr; 否则使用该nr -
反注册
i2c_del_adapter(adap);
2. i2c_algorithm示例
- Linux-5.4中使用GPIO模拟I2C
- Linux-5.4中STM32F157的I2C驱动
- Linux-4.9.88中IMX6ULL的I2C驱动
3. 编写一个框架程序
3.1 设备树
在设备树里构造I2C Bus节点:
i2c-bus-virtual {
compatible = "100ask,i2c-bus-virtual";
};
3.2 platform_driver
分配、设置、注册platform_driver结构体。
核心是probe函数,它要做这几件事:
- 根据设备树信息设置硬件(引脚、时钟等)
- 分配、设置、注册i2c_apdater
3.3 i2c_apdater
i2c_apdater核心是master_xfer函数,它的实现取决于硬件,大概代码如下:
static int xxx_master_xfer(struct i2c_adapter *adapter,
struct i2c_msg *msgs, int num)
{
for (i = 0; i < num; i++) {
struct i2c_msg *msg = msgs[i];
{
// 1. 发出S信号: 设置寄存器发出S信号
CTLREG = S;
// 2. 根据Flag发出设备地址和R/W位: 把这8位数据写入某个DATAREG即可发出信号
// 判断是否有ACK
if (!ACK)
return ERROR;
else {
// 3. read / write
if (read) {
STATUS = XXX; // 这决定读到一个数据后是否发出ACK给对方
val = DATAREG; // 这会发起I2C读操作
} else if(write) {
DATAREG = val; // 这会发起I2C写操作
val = STATUS; // 判断是否收到ACK
if (!ACK)
return ERROR;
}
}
// 4. 发出P信号
CTLREG = P;
}
}
return i;
}