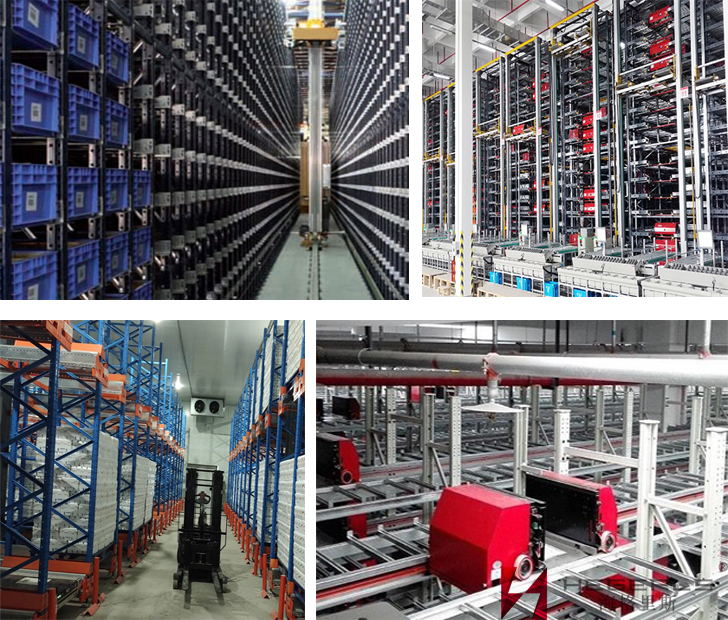
近年来,随着互联网的不断普及,电子商务迅速发展起来,客户订单商品呈现出品种多、批量少、交货期短的特点,使得供货商物流配送中心货架存储密集度不断提升,物料出入库频率越来越高,小件拆零拣选量与日俱增,越来越多的物流配送中心采用基于穿梭车的货到人拣选系统。
海格里斯HEGERLS(河北沃克金属制品有限公司)提供一种结构简单、重量轻便、安全可靠的夹抱式智能穿梭车,以实现在自动化立体仓库的各层准确定位,并实现灵活存取不同存储位置上的货格,从而能发挥穿梭车的最大使用效率,保证穿梭车运行的平稳生和可靠性。
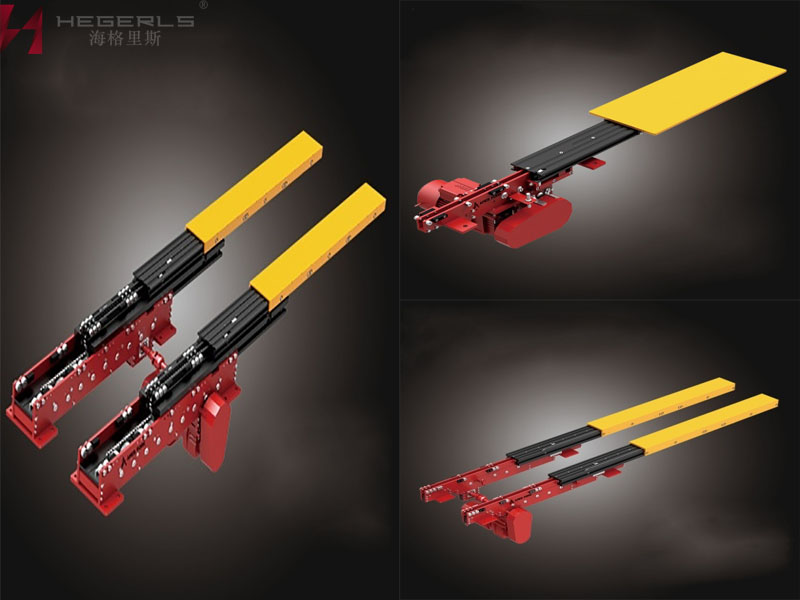
夹抱式伸缩叉广泛应用于立体库多层穿梭车,货架式料箱AGV、RGV,小型堆垛机(Mini Load)等自动化仓储设备。海格里斯HEGERLS夹抱的料箱最大重量能达50Kg,该叉臂的夹抱宽度可以在200~600mm范围内任意调节,最大取件行程840mm,伸缩叉的最大运行速度1.5m/s,加速度1.2m/s²。运行噪音控制在75dB以内,可满足大部分单、双伸位货架的取件要求。海格里斯HEGERLS也可以根据客户的具体要求,定制夹抱宽度、取件行程等参数要求的夹抱式伸缩货叉料箱多层穿梭车立体库。
海格里斯HEGERLS夹抱式伸缩货叉料箱多层穿梭车立体库中的配件伸缩货叉是立体库、物流自动仓储系统中用于是物料存取或移载物品的一个伸缩机构,它具有灵活的双向自动伸缩功能,准确的限位功能!它可以直接装配在堆垛机上,也可以装配在固定的升降举升机构上,也可以安装在移动的升降平台上,堆垛机穿行于货架之间的巷道中,完成自动存取或移载物品的工作!它可与生产线系统、企业管理系统对接,采用计算机及条形码技术(编码器),实现信息化智能管理和运营!

关于海格里斯HEGERLS夹抱式伸缩货叉
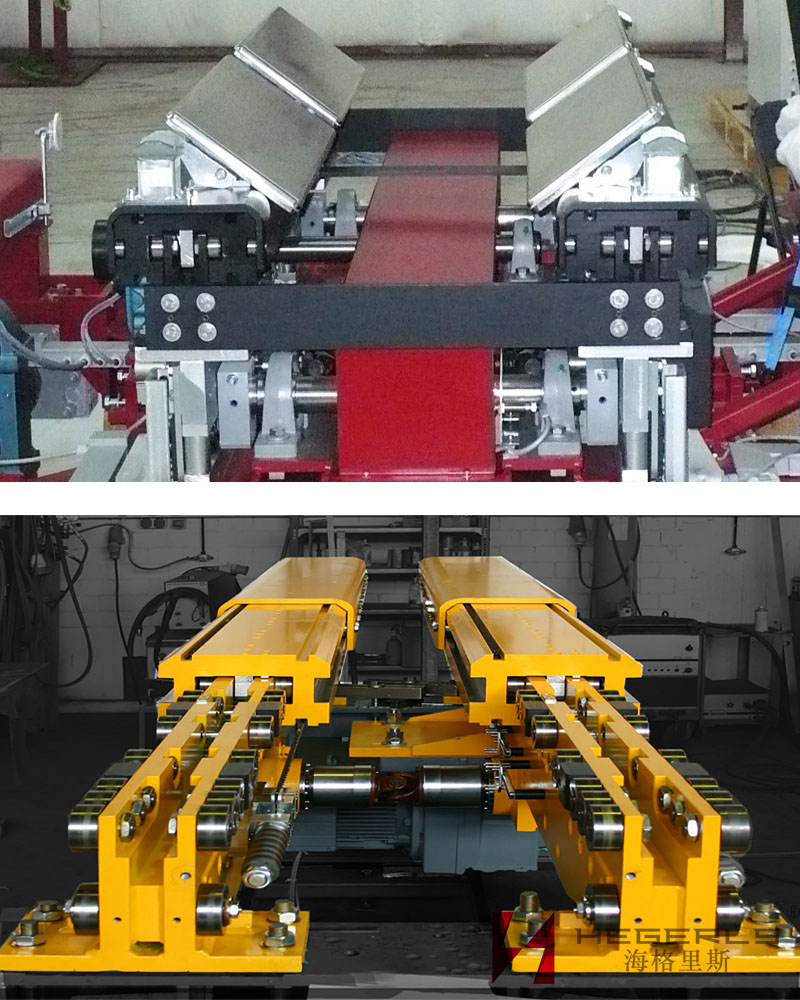
海格里斯HEGERLS夹抱式伸缩货叉是堆垛机伸缩货叉系列中比较独特的一种货叉,即夹抱式双向自动伸缩货叉,又被称为夹抱叉或夹抱货叉、拨指叉或拨指式货叉,是一款专用于小型料箱移载的货叉,可直接装配在多层拣选AGV上、或其它工作平台上,配合叉臂的伸缩、拨杆(挂钩)的离合,完成存取或移载动作!
海格里斯HEGERLS夹抱式货叉多采用铝合金材料,具有体积小、重量轻、运行速度快、伸缩流畅的特点,同时还采用的是多电机同步的原理,实现了同一台伸缩货叉机构可用于对不同规格箱体的移载或存取,不但有效提高了存取工作效率,还大大的提高了仓储的空间利用率,特别适用于高层密集型、智能型仓储!
海格里斯HEGERLS夹抱式伸缩货叉结构
海格里斯HEGERLS夹抱式货叉在结构上有深库位与浅库位之分,深库位就是一个库位上有两个物料箱,浅库位就是一个库位放置一个料箱,即深库位的一次可以同时夹取两个料箱,而浅库位的一次只能夹取一个料箱。海格里斯HEGERLS夹抱式货叉与普通双工位伸缩货叉不同的是拔指式货叉仍然是由内叉体、中叉体、外叉体三节叉体组成,只是其前叉体多出一个拔杆(挂钩)而已,再配合导轨(滑轨)、滚轮条、同步轮、同步带、流利条、拨杆(挂钩)、顶轴、轮杆、驱动电机(伺服)、拨杆电机、探测仪器等部件组成一个完整的伸缩机构,配合叉臂的伸缩、拨杆(挂钩)的离合,完成存取或移载动作!
海格里斯HEGERLS夹抱式伸缩货叉工作原理
海格里斯HEGERLS夹抱式货叉的叉臂是侧立的,采用导轨横向连接,通过控制,导轨可往复滑动,以调整货叉两个叉臂之间的距离,实现多规格物料箱共用一台货叉!在取料的时候叉体伸出到物料储存位,挡料钩子(拔杆)自动放下卡住纸箱或塑料箱的端面,然后货叉缩回,把纸箱或塑料箱拖向货叉的中部,然后再按照程度要求反向移出,挂钩(拨杆)拨回,货叉再缩回,完成取货或移载任务!夹抱式货叉在原理上虽然与普通伸缩货叉相同,但拨指式货叉的传动件、连接杆等部件则是大大的不同,比喻链轮、链条、齿轮、齿条等,全部更换成同步轮、同步带等,而滑臂则采用导轨,叉体材料也全部由金属薄板或铝合金材料替代,因此夹抱式货叉的自身重量只有80kg左右。
另外还要注意的是:夹抱式伸缩货叉在设计时,将密集的储存货架大小、带箱子的货架垂直位置、轨道水平和箱子大小结合,确定延伸叉子的总体参数(延伸叉子移动、箱子间距、叉子宽度、叉子内部宽度、叉子高度等),以此满足货架上集装箱的需求。夹抱式货叉只能对由纸箱包装的箱体产品、或塑料箱体的产品进行移载或存取有效,对不规则的物料产品无法完成移载。另外被移载的物料箱的体积不宜过大、重量不宜过重,负载重量一般不超过100KG!夹抱式货叉的高度一般是根据料箱的高度来设计的!
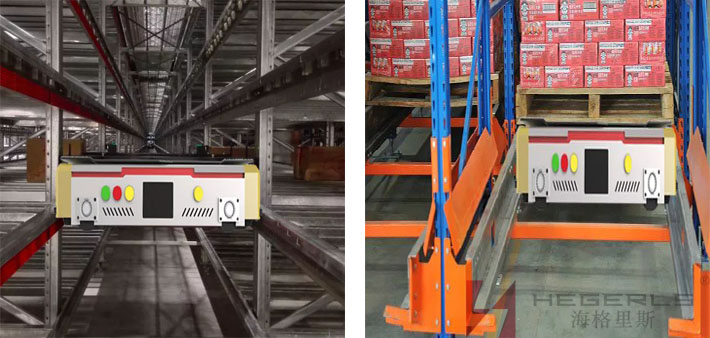
关于海格里斯HEGERLS夹抱式穿梭车
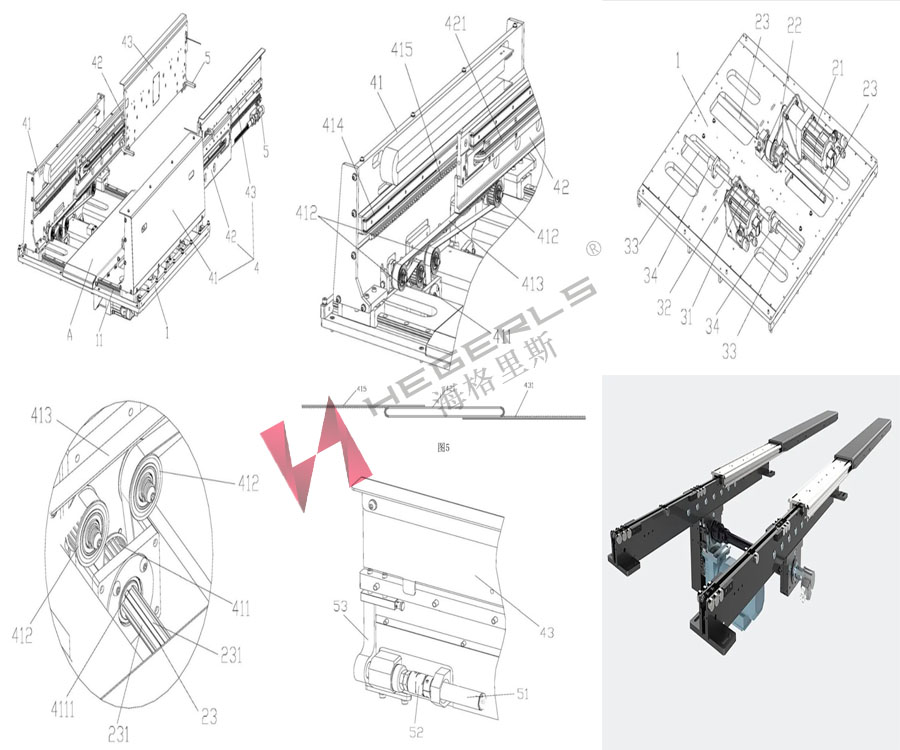
海格里斯HEGERLS夹抱式穿梭车结构组成:穿梭车车架、穿梭车底盘、行走机构、二次伸叉机构、集电装置、承载板和承载平台。结构具体如下:
任意一个穿梭车车架通常是由两侧的主体支架、外壳和内侧的轮毂支架构成的封闭式腔体,并分别设置在穿梭车底盘的两端;外壳通过翻门式铰链设置有可启闭的上盖;轮毂支架上方设置有面板线架;行走机构包括:主动轮、被动轮、直流无刷电机、减速器、连接轴;穿梭车底盘一端的穿梭车车架两侧设置有由连接轴相连的主动轮,穿梭车底盘另一端的穿梭车车架两侧设置有由连接轴相连的被动轮;直流无刷电机与减速器共同配合驱动主动轮并带动被动轮运动;连接轴上设置有磁电编码器,通过磁电编码器获取穿梭车在直线轨道上的启停位置;穿梭车车架的内侧对称设置有二次伸叉机构;二次伸叉机构之间的穿梭车底盘上设置有用于放置货篮的承载平台;穿梭车车架的封闭式腔体内分别设置有承载板,在承载板上依次设置有驱动板、行走机构主控制板和伸叉机构主控制板;驱动板驱动行走机构带动穿梭车运行在直线轨道上,行走机构主控制板控制穿梭车的运行参数和启停位置,并以伸叉机构主控制板控制二次伸叉机构对货架上的货篮进行抓取和放置;穿梭车与直线轨道之间设置有集电装置,集电装置与直线轨道内侧布置的通电导线相连通,并用于为穿梭车供电。夹抱式仓储智能穿梭车的结构特点也在于,在主动轮和被动轮分别与连接轴相接触的位置上设置有凹槽,在凹槽内设置弹性挡圈,以弹性挡圈形成对主动轮和被动轮的轴向定位。在主动轮和被动轮下方的穿梭车底盘侧部,并处于直线轨道与穿梭车底盘之间分别设置有双导向轮,以双导向轮形成对主动轮和被动轮在直线轨道上运行时的左右限位。其中二次伸叉机构又包括:一级伸叉推板、二级伸叉板、二级同步带轮机构、二级伸叉传动机构、伸叉传动电机、另一减速器、传动轴;在穿梭车车架的轮毂支架外侧设置有一级伸叉推板;在一级伸叉推板的正中间开设有U型滑槽,在U型滑槽内等间隔设有若干个U型槽滑轮;在U型滑槽外侧设置有二级伸叉板;二级伸叉板通过螺栓螺母与若干个U型槽滑轮相连接;在二级伸叉板的顶部两端由外向内分别设置有拨叉、直流行星减速电机和光电传感器;光电传感器用于获取拨叉的位置信号并发送给伸叉机构主控制板,由伸叉机构主控制板控制直流行星减速电机驱动拨叉水平或垂直运动;在一级伸叉推板上,并处U型滑槽的正下方和正上方分别设置有二级同步带轮机构;二级同步带轮机构与二级伸叉板上的同步带压板相连接;由伸叉传动电机和另一减速器驱动二级伸叉传动机构运动,并通过传动轴带动另一侧的二级伸叉传动机构运动,使得一级伸叉推板运动并带动二级同步带轮机构运动,从而带动二级伸叉板运动。二级伸叉传动机构包括:磁电编码器、同步带轮一、同步带一、张紧轮装置、齿条;在一级伸叉推板的下方设置有同步带轮一与同步带一;同步带轮一的一侧与传动轴相连,另一侧通过键槽与另一减速器的输出轴相连接,在另一减速器的两侧分别设置有张紧轮装置,用于对同步带轮一与同步带一进行辅助固定;在一级伸叉推板和同步带一之间设置有齿条;以伸叉传动电机和另一减速器驱动同步带轮一与同步带一转动,并通过传动轴带动另一侧的同步带轮二与同步带二转动,同时通过两侧的齿条分别带动相应的一级伸叉推板实现一次伸叉时,二级同步带轮机构同步运动,并带动二级伸叉板运动的同时,U型槽滑轮在U型滑槽内滚动,使得二级伸叉板实现二次伸叉。而张紧轮装置包括:螺栓、调整支架、双螺母、张紧轮;在同步带一的下方,并处于另一减速器的两侧设置有张紧轮,并通过双螺母固定在主体支架上;在双螺母的下方通过螺栓设置有调整支架,以螺栓调节调整支架的位置,使得调整支架带动双螺母上下移动,从而使得同步带一在张紧轮的作用下保持张紧状态。
海格里斯HEGERLS夹抱式穿梭车将如何带动企业效益?
其一:海格里斯HEGERLS夹抱式仓储智能穿梭车的行走机构、伸叉机构与车架、滑触线和集电装置等结构布局合理,充分利用了穿梭车的空间,并能够适应立体仓库中不同规格、不同位置货物的自动存取,扩大了穿梭车的应用覆盖范围,并快速有效的完成穿梭车行走、伸叉、取货、放货等一系列连贯动作,实现了货物的快速、准确存储,从而大大提高了自动化立体仓库的作业效率及自动化技术水平的同时,还降低了企业的各项投资成本。同时结构简单轻便,可靠性高,易于维护,可替代传统意义的巷道堆垛机,实现了系统的柔性化,并且符合电商物流和仓储自动化的发展大趋势。
其二:海格里斯HEGERLS夹抱式仓储智能穿梭车的行走机构中主动轮、被动轮的连接轴上开有凹槽与轴承连接部分通过新型的弹性挡圈连接,实现了连接轴的轴向定位效果;通过采用弹性挡圈实现轴向定位效果可以加大生产效率,节约了成本。
其三:海格里斯HEGERLS夹抱式仓储智能穿梭车通过双导向轮结构,实现了主动轮、被动轮始终在直线轨道上运动沿直线运动而不会偏离轨道,这种定位结构更加稳定可靠。
其四:海格里斯HEGERLS夹抱式仓储智能穿梭车采用的二次伸叉结构,可使伸叉距离更远,可取得更多不同位置的货篮;同时二次伸叉机构原理简单,设计制作的成本低;传动部分则采用单电机+减速器+传动轴的方式使得二次伸叉机构达到同步伸缩的目的,这样更加节约成本、有效减少了所需布置空间,同时又减轻了穿梭车的整车重量。
其五:海格里斯HEGERLS夹抱式仓储智能穿梭车采用新式的张紧轮装置,可使得同步带快速保持张紧状态,实现了穿梭车的正常工作,并且这种张紧轮装置制作简单,安装方便,可进行快速调节,这样既节约了成本,又省去了空间,还提高的工作效率。