本文中的所有重要图片都会给出基于Matplotlib的Python绘制代码以供参考
引言
如果在百度搜索圆角矩形的画法,那么多数结果都会告诉你,就是把一个普通矩形的拐角换成相切的
1
4
\frac{1}{4}
41 圆弧,就像 引文1 和 引文2 说的那样。然而,圆角就是圆弧加直线吗?诸君且看下面这张图片,试问哪条曲线更顺滑、圆角更圆润?
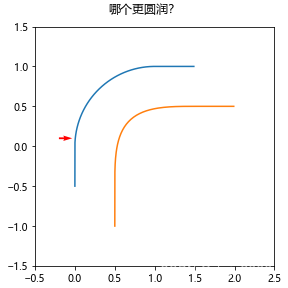
毫无疑问是黄线更顺滑一些,蓝线的转角在和直线的连接处(红色箭头)有种折断的感觉。如果我告诉你,蓝线就是
1
4
\frac{1}{4}
41 圆弧和直线连接得到的,你会不会感觉很奇怪:明明连切线都对上了,怎么还会有折断感?
那么,这两条曲线的差别在哪里呢?答:黄线是二阶连续的,而蓝线仅仅是一阶连续。
二阶连续性
为了理解这里“二阶连续”的含义,首先要具备一个基础知识:如何表达和绘制二维平面上的曲线?
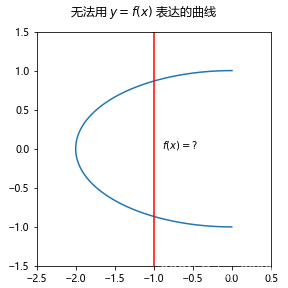
相信这篇文章的绝大多数读者都知道函数和函数图像的关系——我们可以使用函数来表达曲线。但是,我们不能用形如 y = f ( x ) y=f(x) y=f(x) 这样的函数,因为函数是一个单射,如果使用这样的函数,那么在表达会绕回来的曲线时就会有困难,因为这时横坐标 x x x 对应了两个 y y y 值:
对于一般的情况,我们可以使用
x
x
x 和
y
y
y 间的隐函数来表达,引入一个隐变量
t
t
t 就行了:
{
x
=
f
x
(
t
)
y
=
f
y
(
t
)
\left\{\begin{array}{cc} x = f_x(t) \\ y = f_y(t) \end{array}\right.
{x=fx(t)y=fy(t)。如果把
t
t
t 理解为时间,那么这个方程组实际上就描述了曲线的画法:对应任意的时间点
t
t
t,方程组给出了要绘制的点
<
x
,
y
>
\left<x,\ y\right>
⟨x, y⟩。
有了这个基础知识之后,就可以理解“二阶连续”了,这里的“二阶”则是指这 f x f_x fx 和 f y f_y fy 的二阶导,“连续”就是 f x ′ ′ f_x'' fx′′ 和 f y ′ ′ f_y'' fy′′ 连续的意思。那么问题来了:为什么偏偏要“二阶”呢?
二阶连续的物理含义
“二阶”的要求可以追溯到物理意义上。让我们回忆一下,在物理学中,速度是位置关于时间的导数: v ⃗ = d x ⃗ d t \vec{v} = \frac{\mathrm{d}\vec{x}}{\mathrm{d}t} v=dtdx,加速度是速度关于时间的导数: a ⃗ = d v ⃗ d t \vec{a} = \frac{\mathrm{d}\vec{v}}{\mathrm{d}t} a=dtdv,所以加速度是位置关于时间的二阶导数: a ⃗ = d 2 x ⃗ d t 2 \vec{a} = \frac{\mathrm{d}^2\vec{x}}{{\mathrm{d}t}^2} a=dt2d2x;物体的加速度不是凭空而来,而是由受力决定: a ⃗ = F ⃗ m \vec{a} = \frac{\vec{F}}{m} a=mF,加速度与物体的受力情况直接关联。
在这个模型中,由于在任意时刻位置都要满足二阶可导,因此物体的位置和速度都是不能突变的,也就是说,如下的两种运动都是不可能发生的:
而加速度就可以突变了,因为物体的受力可能发生突变,比如两个物体发生了碰撞——事实上,如果不考虑外力,碰撞就是系统内物体加速度突变的充要条件。
现在回到圆角矩形的绘制,让我们想象自己用手抚摸过圆角,这就将曲线的绘制和上面的物理模型联系了起来:
如果曲线不是二阶连续的,那么当手沿着曲线的轨迹运动时,在间断点处二阶导数发生突变,就意味着手就会突然受力,好像撞上了什么东西,因此我们就会感觉到“硌手”。下面这张动图绘制了沿圆弧+直线的轨迹的运动参数变化,可以直观地看到加速度的突变:
设计圆角曲线的函数
有了物理上的运动模型后,我们的思维就不再局限于圆和直线,从而可以重新设计圆角曲线的函数了。我们还是以左上角的圆角为例,目标是设计这样一组函数: { x = f x ( t ) y = f y ( t ) \left\{\begin{array}{l} x = f_x(t) \\ y = f_y(t) \end{array}\right. {x=fx(t)y=fy(t),使得其满足:
{ f x ( 0 ) = 0 , f y ( 0 ) = 0 ( 起 点 ) f x ( 1 ) = 1 , f y ( 1 ) = 1 ( 终 点 ) f x ′ ( 0 ) = 0 , f y ′ ( 0 ) = 1 ( 起 始 速 度 ) f x ′ ( 1 ) = 1 , f y ′ ( 1 ) = 0 ( 终 末 速 度 ) f x ′ ′ ( 0 ) = f y ′ ′ ( 0 ) = f x ′ ′ ( 1 ) = f y ′ ′ ( 1 ) = 0 ( 与 直 线 的 连 接 点 二 阶 连 续 ) f x ′ ′ , f y ′ ′ ∈ C [ 0 , 1 ] ( 加 速 度 在 闭 区 间 [ 0 , 1 ] 上 连 续 ) ∀ t ∈ [ 0 , 1 ] { f x ( t ) + f x ( 1 − t ) 2 + f y ( t ) + f y ( 1 − t ) 2 = 1 f y ( 1 − t ) − f y ( t ) = f x ( 1 − t ) − f x ( t ) ( 关 于 对 角 线 对 称 ) \left\{ \begin{aligned} & f_x(0) = 0,\ f_y(0) = 0 & (起点) \\ & f_x(1) = 1,\ f_y(1) = 1 & (终点) \\ & f_x'(0) = 0,\ f_y'(0) = 1 & (起始速度) \\ & f_x'(1) = 1,\ f_y'(1) = 0 & (终末速度) \\ & f_x''(0) = f_y''(0) = f_x''(1) = f_y''(1) = 0 & (与直线的连接点二阶连续) \\ & f_x'',\ f_y'' \in C[0,\ 1] & (加速度在闭区间[0,1]上连续) \\ & \forall t \in [0, 1] \left\{ \begin{aligned} & \frac{f_x(t) + f_x(1-t)}{2} + \frac{f_y(t) + f_y(1-t)}{2} = 1 \\ & f_y(1-t) - f_y(t) = f_x(1-t) - f_x(t) \end{aligned} \right. & (关于对角线对称) \end{aligned} \right. ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧fx(0)=0, fy(0)=0fx(1)=1, fy(1)=1fx′(0)=0, fy′(0)=1fx′(1)=1, fy′(1)=0fx′′(0)=fy′′(0)=fx′′(1)=fy′′(1)=0fx′′, fy′′∈C[0, 1]∀t∈[0,1]⎩⎨⎧2fx(t)+fx(1−t)+2fy(t)+fy(1−t)=1fy(1−t)−fy(t)=fx(1−t)−fx(t)(起点)(终点)(起始速度)(终末速度)(与直线的连接点二阶连续)(加速度在闭区间[0,1]上连续)(关于对角线对称)
满足要求的函数当然不止一条,事实上,我们有很大的设计空间,那么,怎么从中找一条出来呢?
我们从二阶导数,也就是加速度函数入手,在设计出加速度函数后,只需要求解不定积分,就可以轻松满足前四项约束了。为此,我们首先分析上述约束对加速度函数的要求:
-
速度约束
f x ′ ( 1 ) − f x ′ ( 0 ) = ∫ 0 1 f x ′ ′ ( t ) d t = 1 f y ′ ( 1 ) − f y ′ ( 0 ) = ∫ 0 1 f y ′ ′ ( t ) d t = − 1 f_x'(1) - f_x'(0) = \int_0^1 f_x''(t)\ \mathrm dt = 1\\ f_y'(1) - f_y'(0) = \int_0^1 f_y''(t)\ \mathrm dt = -1 fx′(1)−fx′(0)=∫01fx′′(t) dt=1fy′(1)−fy′(0)=∫01fy′′(t) dt=−1
-
对称约束
我们希望画出的圆弧是关于拐角的平分线 x + y = 1 x+y=1 x+y=1 对称的,更进一步地,我们不光希望最终轨迹是对称的,最好绘制过程也是关于这条直线对称的,也就是说:
{ f y ( 1 − t ) = 1 − f x ( t ) f x ( 1 − t ) = 1 − f y ( t ) \left\{ \begin{aligned} & f_y(1-t) = 1 - f_x(t) \\ & f_x(1-t) = 1 - f_y(t) \end{aligned} \right. {fy(1−t)=1−fx(t)fx(1−t)=1−fy(t)
上面的两个公式其实说了同一件事: f y ( t ) = 1 − f x ( 1 − t ) f_y(t) = 1 - f_x(1-t) fy(t)=1−fx(1−t),这意味着我们在设计时只需设计 f x ′ ′ f_x'' fx′′ 即可, f y ′ ′ f_y'' fy′′ 可以直接由此求出来。
现在,问题已经很简单了:设计 f x ′ ′ ( t ) f_x''(t) fx′′(t) 使它在 0 0 0 和 1 1 1 处为 0 0 0,并且在 [ 0 , 1 ] [0,1] [0,1] 上的积分为 1 1 1。
这样的函数还不好找吗?一个最简单的函数就是画个三角形:
 也可以用正弦函数,更丝滑:
也可以用正弦函数,更丝滑:
进一步探讨
-
匀速约束
如果运动的过程是匀速的,那么就意味着我们在绘制曲线时在相同的长度上花费了相同的时间,如果我们画的是虚线而非实线,那么虚线点之间的距离就是均匀的。另一方面,从性能的角度来看,这也很重要,因为我们只关心绘制的最终结果,而不关心过程,如果不均匀,那么就意味着我们绘制的开销和曲线的直观长度不符,这可能会限制我们绘制很长的曲线。
但其实这是一个伪约束,因为我们总可以通过一个后期处理得到一个均匀化的新解析式。在现实中的直观理解就是,施工队可能花了很多时间找到一条从A到B的路线,然而一旦路修好之后,我们总可以按自己喜欢的速度将这段路走完。在数学上,这就是对原运动过程进行时间上的放缩:
给定轨迹描述函数 { x = f x ( t ) y = f y ( t ) \left\{\begin{array}{cc} x = f_x(t) \\ y = f_y(t) \end{array}\right. {x=fx(t)y=fy(t),我们总可以通过设计一个时间放缩函数 s s s,使得新轨迹函数 { x = f x ( s ( t ) ) y = f y ( s ( t ) ) \left\{\begin{array}{cc} x = f_x(s(t)) \\ y = f_y(s(t)) \end{array}\right. {x=fx(s(t))y=fy(s(t)) 满足 ( d x d t ) 2 + ( d y d t ) 2 = C \sqrt{(\frac{\mathrm{d}x}{\mathrm{d}t})^2 +(\frac{\mathrm{d}y}{\mathrm{d}t})^2 } = C (dtdx)2+(dtdy)2=C,其中 C C C 为任意设定的速度常数。
要想求出这个 s s s 函数,只需要解一个和原轨迹函数相关的微分方程即可,具体过程就不赘述啦!
-
高阶连续
从最开始的对比图上,我们可以得知,人眼是能分辨一阶连续和二阶连续的区别的,那么肯定有人就会问了:是不是更高阶的更丝滑?如果是,那么能不能做到在连接点处无穷阶连续,不就达到极致丝滑了吗?
其实设计一个高阶连续的函数并不是什么难事,事实上,我们可以用多项式凑出任意高阶的函数 P ( t ) = ∑ i = 0 N a i t i P(t) = \sum_{i=0}^N a_i t^i P(t)=∑i=0Naiti,假设目标为 k k k 阶连续,则为了求出 f x ′ ′ f_x'' fx′′ 可构建方程组:
{ ∫ 0 1 P ( t ) d t = 1 P ( m ) ( 0 ) = 0 ∀ m ∈ [ 0 , k ] P ( m ) ( 1 ) = 0 ∀ m ∈ [ 0 , k ] \left\{ \begin{aligned} & \int_0^1 P(t) \mathrm{\ d}t = 1 \\ & P^{(m)}(0) = 0 & \forall m \in [0, k] \\ & P^{(m)}(1) = 0 & \forall m \in [0, k] \end{aligned} \right. ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧∫01P(t) dt=1P(m)(0)=0P(m)(1)=0∀m∈[0,k]∀m∈[0,k]
由 P ( t ) P(t) P(t) 是 N N N 阶多项式可以得出:
∫ 0 1 P ( t ) d t = ∑ i = 0 N a i i + 1 P m ( t ) = ∑ i = m N ( a i ⋅ i ! ( i − m ) ! ⋅ t i − m ) \int_0^1 P(t) \mathrm{\ d}t = \sum_{i=0}^N \frac{a_i}{i+1} \\ P^m(t) = \sum_{i=m}^N \left( a_i \cdot \frac{i!}{(i-m)!} \cdot t^{i-m} \right) ∫01P(t) dt=i=0∑Ni+1aiPm(t)=i=m∑N(ai⋅(i−m)!i!⋅ti−m)可见前面的方程组实际上是线性方程组,组中共 2 k + 3 2k+3 2k+3 个方程,因此 P ( t ) P(t) P(t) 必须要至少为 2 k + 2 2k+2 2k+2 阶多项式才能得到实数解。
使用上面的方法,我绘制出了 f x ′ ′ f_x'' fx′′ 0~11阶连续对应的曲线:

除了弧变得越来越小了之外,我个人觉得,这些曲线在连接处的顺滑度上看不出什么区别。这也许说明,经过漫长的自然演化后,人类的肉眼恰好进化到了能识别出有危险的二阶不连续拐角,而对高阶不连续就不敏感了。现在,我们讨论第二个问题:能不能做到无穷阶连续?答案是不能的,因为如果无穷阶连续,就是在连接点处的无穷阶导数都为零,那么根据泰勒展开式,这条曲线就是 f ( t ) ≡ 0 f(t) \equiv 0 f(t)≡0……,那就不可能拐弯了。也许,从另一方面来说,直线就是极致顺滑的曲线。
总结
本文系统讨论了圆角曲线的绘制方法,不仅给出了其数学解析式,更介绍了解析式的设计方法,最后本文通过绘制更高阶的连续曲线,证明了人类肉眼具备且仅具备区分二阶连续曲线的能力(不过也许有眼力好的人能看出最后一张图片曲线的差别)。本文所介绍的方法不仅适用于绘制 90° 拐角的曲线,稍加修改可以实现在任意两条线的断点处绘制任意阶连续的曲线。
附录
文中所有函数图片的绘制代码(按出现顺序给出):
# %%
from math import cos, pi, sin, factorial
from timeit import repeat
from tkinter import Y
import matplotlib as mpl
import matplotlib.pyplot as plt
import numpy as np
from matplotlib.animation import FuncAnimation
mpl.rcParams["font.family"] = "Microsoft YaHei"
# %%
fig, ax = plt.subplots(1, 1, layout="constrained")
fig.suptitle("哪个更圆润?")
fig.set_size_inches(4, 4)
ax.axis("scaled")
ax.set_xlim([-0.5, 2.5]), ax.set_ylim([-1.5, 1.5])
def circle(t):
if t < 0:
return 0, t
if t > 1:
return t, 1
rad = pi / 2 * t
return 1 - cos(rad), sin(rad)
def sin_acc(t):
if t < 0:
return 0, t
if t > 1:
return t, 1
return (
2 * (1 / 2 * t - sin(pi * t) / (2 * pi)),
2 * (1 / 2 * t + sin(pi * t) / (2 * pi)),
)
arr_t = np.arange(-0.5, 1.5, 0.01)
arr_x = np.empty_like(arr_t)
arr_y = np.empty_like(arr_t)
for i, t in enumerate(arr_t):
arr_x[i], arr_y[i] = circle(t)
ax.plot(arr_x, arr_y)
for i, t in enumerate(arr_t):
arr_x[i], arr_y[i] = sin_acc(t)
arr_x[i] += 0.5
arr_y[i] -= 0.5
ax.plot(arr_x, arr_y)
ax.quiver(-0.2, 0.1, 0.3, 0, color="red")
fig.savefig("1.png")
# %%
fig, ax = plt.subplots(1, 1, layout="constrained")
fig.suptitle("无法用 $y=f(x)$ 表达的曲线")
fig.set_size_inches(4, 4)
ax.axis("scaled")
ax.set_xlim([-2.5, 0.5]), ax.set_ylim([-1.5, 1.5])
arr_t = np.arange(0.5 * pi, 1.5 * pi, 0.01)
arr_x = np.empty_like(arr_t)
arr_y = np.empty_like(arr_t)
for i, t in enumerate(arr_t):
arr_x[i], arr_y[i] = cos(t) * 2, sin(t)
ax.plot(arr_x, arr_y)
ax.axvline(-1, color="red")
ax.text(-0.9, 0, "$f(x)=?$")
fig.savefig("2.png")
# %%
fig, (ax_l, ax_r) = plt.subplots(1, 2, layout="constrained")
fig.suptitle("不可能发生的两种运动")
fig.set_size_inches(8, 4)
ax_l.set_title("位置传送")
ax_l.axis("scaled")
ax_l.set_xlim([-0.5, 2.5]), ax_l.set_ylim([-0.5, 2.5])
ax_r.set_title("瞬间变速")
ax_r.axis("scaled")
ax_r.set_xlim([-0.5, 2.5]), ax_r.set_ylim([-0.5, 2.5])
dt = 0.05
def animate():
for t in np.arange(0, 2, dt):
lx = 0 if t < 1 else t
ly = t if t < 1 else 2
ax_l.scatter(lx, ly, 3, color="blue")
rx = 0 if t < 1 else t - 1
ry = t
ax_r.scatter(rx, ry, 3, color="blue")
yield
ani = FuncAnimation(
fig, lambda x: None, animate, interval=1000 * dt, repeat=True
)
ani.save("3.gif")
# %%
fig, axd = plt.subplot_mosaic(
[
["p", "p", "x", "v_x", "a_x"],
["p", "p", "y", "v_y", "a_y"],
],
layout="constrained",
)
fig.suptitle("圆弧+直线轨迹的运动过程")
fig.set_size_inches(13, 5)
ax_p = axd["p"]
ax_p.set_title(r"$\left<x,\ y\right>$")
ax_p.axis("scaled")
ax_p.set_xlim([-1, 1.5]), ax_p.set_ylim([-1, 1.5])
ax_x, ax_y = axd["x"], axd["y"]
ax_vx, ax_vy = axd["v_x"], axd["v_y"]
ax_ax, ax_ay = axd["a_x"], axd["a_y"]
for axn in ["x", "y", "v_x", "v_y", "a_x", "a_y"]:
ax = axd[axn]
ax.set_title(rf"${axn}$")
ax.set_xlim([-0.5, 1.5]), ax.set_ylim([-1.5, 1.5])
# ax.axis("scaled")
dt = 0.05
def animate():
for t in np.arange(-0.5, 0, dt):
x = -0.5
y = t
ax_p.scatter(x, y, 5, color="blue")
ax_x.scatter(t, x, 3, color="blue")
ax_y.scatter(t, y, 3, color="blue")
vx = 0
vy = 1
ax_vx.scatter(t, vx, 3, color="blue")
ax_vy.scatter(t, vy, 3, color="blue")
ax = 0
ay = 0
ax_ax.scatter(t, ax, 3, color="blue")
ax_ay.scatter(t, ay, 3, color="blue")
yield
for t in np.arange(0, 1, dt):
ang = t * pi / 2
x = 0.5 - cos(ang)
y = sin(ang)
ax_p.scatter(x, y, 5, color="red")
ax_x.scatter(t, x, 3, color="red")
ax_y.scatter(t, y, 3, color="red")
vx = sin(ang)
vy = cos(ang)
ax_vx.scatter(t, vx, 3, color="red")
ax_vy.scatter(t, vy, 3, color="red")
ax = cos(ang)
ay = -sin(ang)
ax_ax.scatter(t, ax, 3, color="red")
ax_ay.scatter(t, ay, 3, color="red")
yield
for t in np.arange(1, 1.5, dt):
x = t - 0.5
y = 1
ax_p.scatter(x, y, 5, color="blue")
ax_x.scatter(t, x, 3, color="blue")
ax_y.scatter(t, y, 3, color="blue")
vx = 1
vy = 0
ax_vx.scatter(t, vx, 3, color="blue")
ax_vy.scatter(t, vy, 3, color="blue")
ax = 0
ay = 0
ax_ax.scatter(t, ax, 3, color="blue")
ax_ay.scatter(t, ay, 3, color="blue")
yield
ani = FuncAnimation(
fig, lambda x: print(".", end=""), animate, interval=1000 * dt, repeat=True
)
ani.save("4.gif")
# %%
fig, axd = plt.subplot_mosaic(
[
["p", "p", "x", "v_x", "a_x"],
["p", "p", "y", "v_y", "a_y"],
],
layout="constrained",
)
fig.suptitle("加速度采用线性连续函数")
fig.set_size_inches(13, 5)
ax_p = axd["p"]
ax_p.set_title(r"$\left<x,\ y\right>$")
ax_p.axis("scaled")
ax_p.set_xlim([-1, 1.5]), ax_p.set_ylim([-1, 1.5])
ax_x, ax_y = axd["x"], axd["y"]
ax_vx, ax_vy = axd["v_x"], axd["v_y"]
ax_ax, ax_ay = axd["a_x"], axd["a_y"]
for axn in ["x", "y", "v_x", "v_y", "a_x", "a_y"]:
ax = axd[axn]
ax.set_title(rf"${axn}$")
ax.set_xlim([-0.5, 1.5]), ax.set_ylim([-1.5, 1.5])
# ax.axis("scaled")
dt = 0.05
def animate():
for t in np.arange(-0.5, 0, dt):
x = -0.5
y = t
ax_p.scatter(x, y, 5, color="blue")
ax_x.scatter(t, x, 3, color="blue")
ax_y.scatter(t, y, 3, color="blue")
vx = 0
vy = 1
ax_vx.scatter(t, vx, 3, color="blue")
ax_vy.scatter(t, vy, 3, color="blue")
ax = 0
ay = 0
ax_ax.scatter(t, ax, 3, color="blue")
ax_ay.scatter(t, ay, 3, color="blue")
yield
for t in np.arange(0, 1, dt):
ang = t * pi / 2
x = 0.5 - cos(ang)
y = sin(ang)
ax_p.scatter(x, y, 5, color="red")
ax_x.scatter(t, x, 3, color="red")
ax_y.scatter(t, y, 3, color="red")
vx = t**2 if t < 0.5 else 2 * t - 0.5 * (t - 0.5) ** 2
vy = 1 - vx
ax_vx.scatter(t, vx, 3, color="red")
ax_vy.scatter(t, vy, 3, color="red")
ax = 2 * t if t < 0.5 else 2 - (t - 0.5)
ay = -ax
ax_ax.scatter(t, ax, 3, color="red")
ax_ay.scatter(t, ay, 3, color="red")
yield
for t in np.arange(1, 1.5, dt):
x = t - 0.5
y = 1
ax_p.scatter(x, y, 5, color="blue")
ax_x.scatter(t, x, 3, color="blue")
ax_y.scatter(t, y, 3, color="blue")
vx = 1
vy = 0
ax_vx.scatter(t, vx, 3, color="blue")
ax_vy.scatter(t, vy, 3, color="blue")
ax = 0
ay = 0
ax_ax.scatter(t, ax, 3, color="blue")
ax_ay.scatter(t, ay, 3, color="blue")
yield
ani = FuncAnimation(
fig, lambda x: print(".", end=""), animate, interval=1000 * dt, repeat=True
)
ani.save("5.gif")
# %%
def poly_fx_d2(k: int):
N = 2 * k + 3 # 2k+2 阶多项式共 2k+3 个待确定系数
A = np.ndarray((N, N), dtype=np.float64)
# 积分为 1
for i in range(N):
A[0, i] = 1 / (i + 1)
# P(m)(0) = 0
for m in range(0, k + 1):
row = m + 1
A[row, :m] = 0
for i in range(m, N):
A[row, i] = factorial(i) / factorial(i - m) * 0 ** (i - m)
# P(m)(1) = 0
for m in range(0, k + 1):
row = m + 1 + k + 1
A[row, :m] = 0
for i in range(m, N):
A[row, i] = factorial(i) / factorial(i - m) * 1 ** (i - m)
b = np.zeros(N)
b[0] = 1
# print(A, b)
d2_ai = np.linalg.solve(A, b)
# fx_d2 = lambda t: d2_ai @ t ** np.arange(len(ai))
d1_ai = np.ndarray([len(d2_ai) + 1], dtype=np.float64)
d1_ai[0] = 0
d1_ai[1:] = d2_ai / np.arange(1, len(d2_ai) + 1, dtype=np.float64)
ai = np.ndarray([len(d1_ai) + 1], dtype=np.float64)
ai[0] = 0
ai[1:] = d1_ai / np.arange(1, len(d1_ai) + 1, dtype=np.float64)
return lambda t: ai @ t ** np.arange(len(ai))
def plot(ax, k, dx, dy):
_fx = poly_fx_d2(k)
def f(t):
if t < 0:
x, y = 0, t
elif t > 1:
x, y = t, 1
else:
x, y = _fx(t), 1 - _fx(1 - t)
return x + dx, y + dy
arr_t = np.arange(-0.5, 1.5, 0.01)
arr_x = np.empty_like(arr_t)
arr_y = np.empty_like(arr_t)
for i, t in enumerate(arr_t):
arr_x[i], arr_y[i] = f(t)
ax.plot(arr_x, arr_y)
fig, ax = plt.subplots(1, 1, layout="constrained")
fig.set_size_inches(8, 8)
ax.axis("scaled")
ax.set_xlim([0, 3]), ax.set_ylim([-2, 1])
N = 11
dx = dy = 0.0
for k in range(N + 1):
dx += 0.2
dy -= 0.2
plot(ax, k, dx, dy)
ax.text(dx, dy + 1, k)
fig.suptitle(f"$f_x''$ 0~{N} 阶连续的对比")
fig.savefig("6.png")

![[附源码]java毕业设计家校通信息管理系统](https://img-blog.csdnimg.cn/fd1eacda3e3e4a9da6abbf9b9df004e5.png)